科普级望远镜的天文观测与科学研究
2023-11-17 06:54:58陈勋浩慕海洋
天文研究与技术 2023年6期
陈勋浩,吴 宏,慕海洋
(1. 中国科学院国家天文台,北京 100101;2. 中国科学院大学天文与空间科学学院,北京 100049)
在光学天文观测领域,电荷耦合器件(Charge Coupled Device, CCD)有着数十年的发展历史,已成为最为常见的专业终端探测器。但因CCD价格昂贵、读出速度慢等缺点限制了它在大众范围内的普及使用。随着天文学的蓬勃发展,越来越多的天文爱好者开始尝试天文观测,CMOS相机凭借高空间采样率、高时间采样率和高性价比等优势逐渐成为天文观测探测器中的新起之秀[1],并且在手机摄影和数码相机的推动下,各类CMOS相机的成像质量也在飞速提升。
此外,建设大口径望远镜成本高且存在许多技术难题。在时域天文学兴起的时代,大口径望远镜难以满足快速大面积巡天的要求,由多个较小口径望远镜构成监测网络是未来的一个重要发展方向。例如,针对时域巡天的司天工程项目[2]将建造50多台米级口径大视场望远镜,构成一个大型望远镜阵列集群系统,预期实现高频率大视场巡天,而大靶面的CCD相机制作成本高且读出速度慢,很难满足快速巡天的要求。因此司天工程将使用大靶面拼接的科学级CMOS相机作为终端探测器。但早期的CMOS相机由于动态范围小、像素间增益不一致等缺点,未能在天文科学观测中得到广泛应用。如今CMOS相机已经具备了天文观测条件,但仍需要在观测中不断测试、使用和完善。
专业天文望远镜由于成本高且技术维护难度很大,显然不适合更广泛的人群使用。为了使更多的爱好者,尤其是中小学天文爱好者,能够加入天文科学观测和研究中,我们使用科普级小口径望远镜配置低价的CMOS相机进行了天文观测测试。这也为广大天文爱好者进行天文观测和科学研究提供了一个有效的途径。
1 望远镜和CMOS相机的性能参数和测试
为了测试更具普适性和代表性,我们选择一般中小学爱好者和学校都有能力采购的望远镜Sky-Watcher 150PDS和CMOS相机(ZWO ASI120MM-S黑白高速天文相机)进行测试。
Sky-Watcher 150PDS是一款市面上常见的牛顿反射式望远镜,主镜口径为150 mm,附件包括可跟踪的赤道仪、电动调焦器、滤镜轮、寻星镜、遥控手柄、重锤和三脚架等。
CMOS常用作手机、数码相机的传感器。本次测试使用的CMOS相机、望远镜的型号和部分参数见表1。图1为CMOS相机与望远镜示意图,其中,(a)CMOS相机,安装在望远镜的目镜端;(b)安装前望远镜的零部件,包括镜筒、赤道仪、三脚架等;(c)安装后的望远镜。
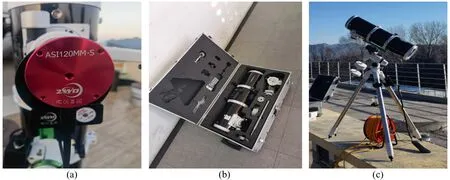
图1 CMOS与望远镜Fig.1 CMOS and telescope
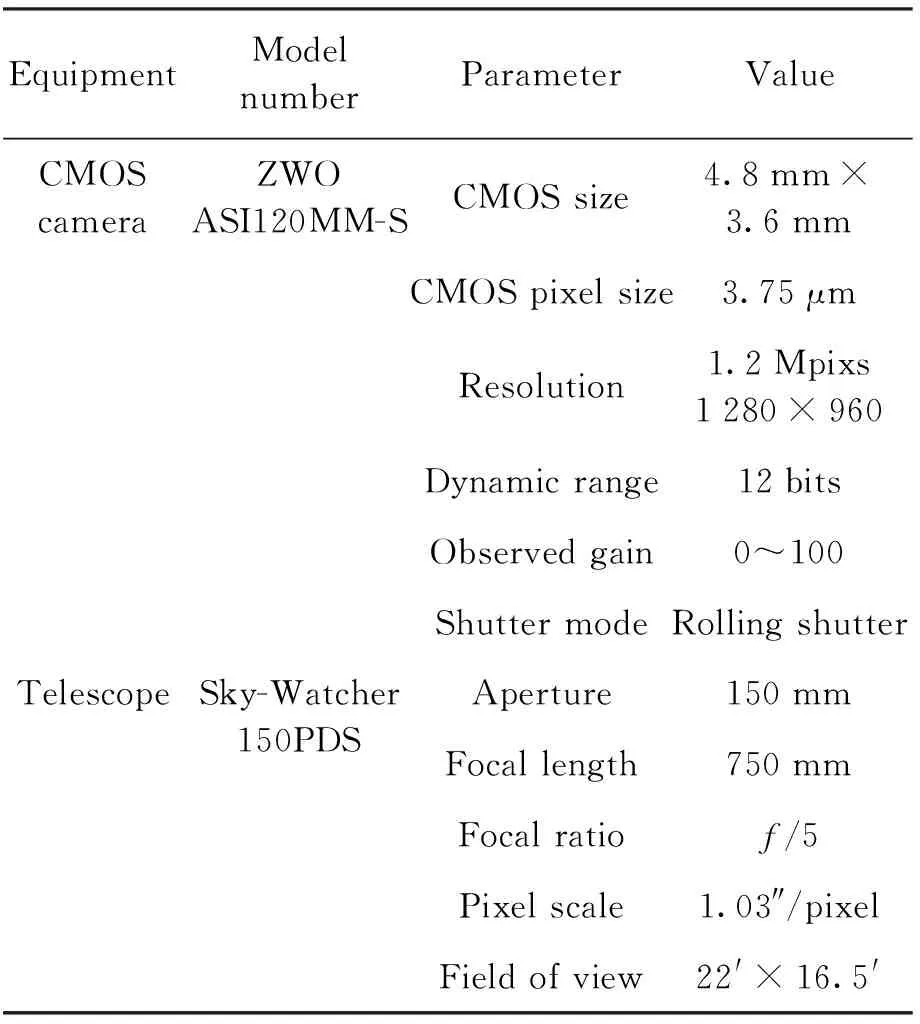
表1 CMOS相机与望远镜部分参数Table 1 Partial parameters of CMOS camera and telescope
测量的CMOS相机性能参数包括增益(Gain)、读出噪声(Read Noise,RN)、满阱电荷(Full Well Capacity,FWC)和动态范围(Dynamic Range,DR)[3]。在拍摄时,我们可以选择CMOS相机不同的拍摄增益档位,以上4个参数随不同的拍摄增益档位发生变化。
各参数的计算公式为[4-5]
(1)
(2)
(3)
(4)
其中,DC为暗电流。经测定,本款CMOS相机的暗电流稳定在0.5e-/(pixel·s)以下,而拍摄时的曝光时间在5 s以下,因此本次测试忽略暗电流的影响。(1)式~(4)式是针对CCD参数的计算方法,由于CMOS相机的像元设计不同,各像元间增益可能不一致[6],因此公式对CMOS相机而言是近似的,需要假设CMOS各像元的增益值几乎相同。
图2(a)为相机官方给出的测试结果,(b)为本次测试结果,从上至下参数依次为满阱电荷、增益、动态范围和读出噪声。其中横坐标中的Gain为相机拍摄增益档位,纵坐标中的Gain为电子与计数值间的转换系数e-/ADU。在横坐标Gain=29处,e-/ADU为1,特此标识。图2来源于https://zwoasi.com/product-detail/asi120mm-s-mono。与官方测试结果对比,性能曲线的走势、跳变点、最大值都能良好匹配,可以确定本款CMOS相机的官方性能参数是可靠的。
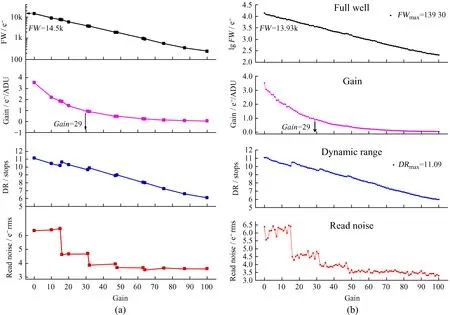
图2 CMOS参数曲线Fig.2 Parameter curves of CMOS
2 天文观测
2.1 滤光片
本次测试使用的滤光片为ZWO LRGB滤光片套装。ZWO RGB滤光片与Johnson系统UBV波段的中心波长与带宽见表2。根据中心波长的对比,选择ZWO B滤光片与ZWO G滤光片进行测试,比较接近Johnson系统中的B波段与V波段。为避免混淆,后文称ZWO B滤光片得到的数据为B波段数据,ZWO G滤光片得到的数据为V波段数据。
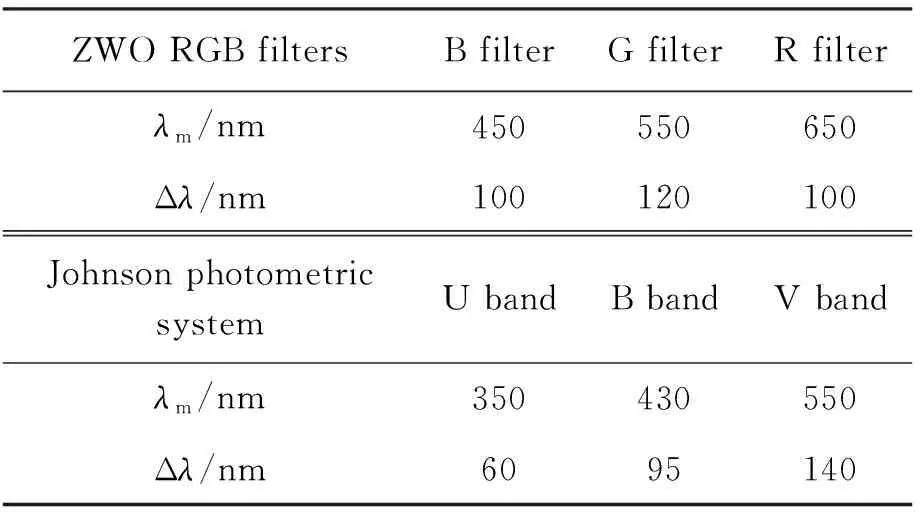
表2 ZWO RGB滤光片与Johnson测光系统各波段的中心波长(λm)与带宽(Δλ)Table 2 The central wavelength (λm)and bandwidth (Δλ)of ZWO RGB filters and Johnson photometric system
2.2 辅助图像
天文辅助图像主要包括本底图像,不同波段的平场图像和暗场图像。其中,由于本次测试使用的CMOS相机暗流较低,故不考虑暗场图像。
本底又称偏置场,是CCD或CMOS相机因偏置电压和固有结构而存在的固有读数,在处理平场和科学图像之前都需要先扣除。拍摄方法为首先设置与晚上观测时相同的相机参数,在黑暗环境中关闭镜盖进行0 s曝光,每晚观测前拍摄10幅本底图像。
平场是为了改正由于镜面、滤光片或光学器件等原因引起的光路不均匀,或CMOS相机自身的像元响应不均匀。平场图像的获取需要拍摄均匀光源,以计算相同强度的光线到达探测器各像元时的不均匀程度。
对于本次测试使用的科普级小望远镜而言,应选择拍摄晨昏天光平场。每天在天文晨光始与昏影终之前将望远镜指向天顶,在与夜间观测相同相机参数状态下,拍摄不同波段平场图像各10幅,将图像的平均计数值控制在10 000至30 000之间,以选择正确的曝光时间。
2.3 观测目标与观测信息
本次测试是在国家天文台兴隆观测基地,我们观测了一个疏散星团M35和一颗短周期变星V*V2455。M35是一个位于双子座的疏散星团,视星等为5.3 mag,视直径约为28′[7],与望远镜视场相近,在观测期间明亮可见且高度角适合。V*V2455 Cyg是一颗盾牌δ型星(Delta Scuti Star),这类变星是位于脉动不稳定带的短周期造父变星,光谱型为A-F,光变周期短于0.3天。V*V2455 Cyg的光变周期为0.094 206天,光变幅度为0.44 mag[8],可以在观测夜里获得3个周期的数据,适合作为观测目标。具体观测策略与信息见表3。
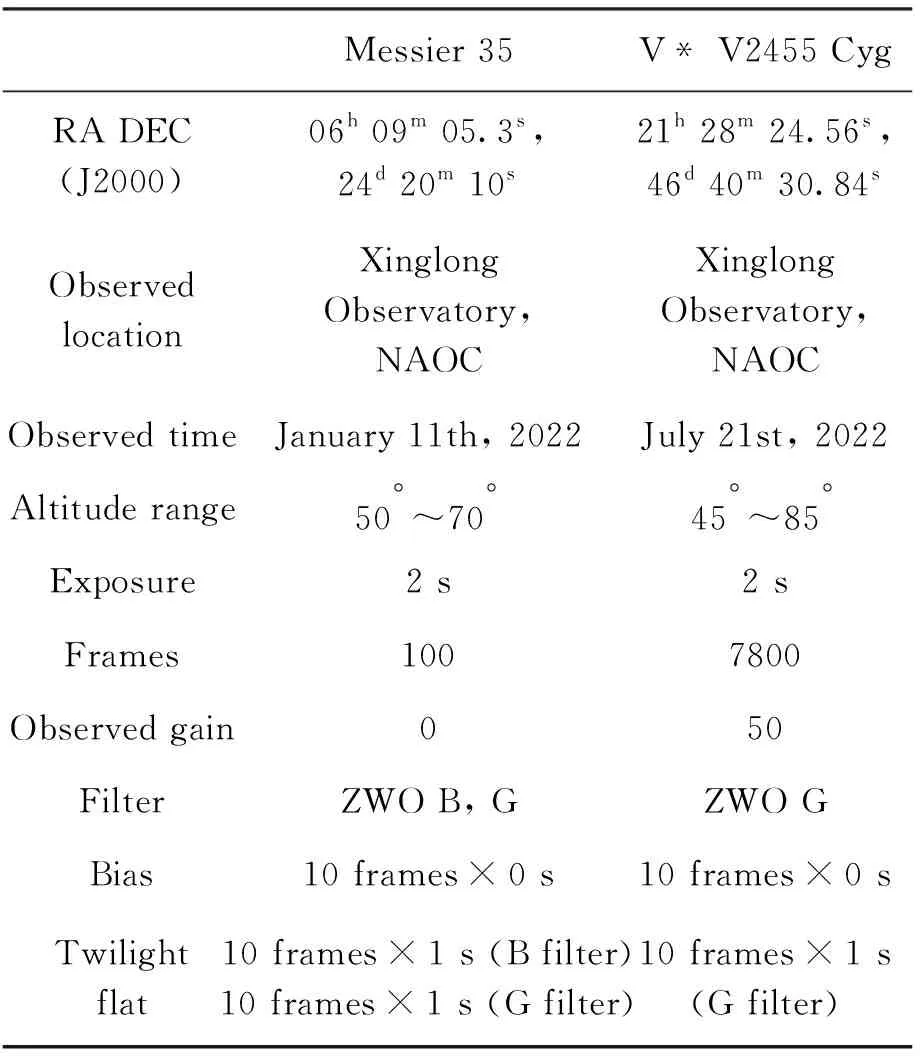
表3 观测信息Table 3 Observed information
3 疏散星团的测光
3.1 图像预处理
3.1.1 本底改正
对每晚观测前拍摄的10幅本底图像进行中值合并,获得一幅合并的本底图像,如图3(a)。本底改正即所有图像减去合并后的本底图像。
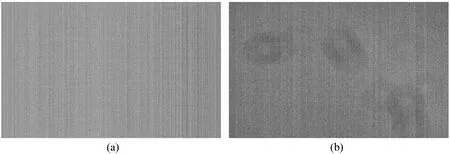
图3 (a)合并后的本底图像;(b)V波段平场图像Fig.3 (a)Combined bias;(b)V band flat
3.1.2 平场改正
平场改正需要分波段进行。我们先对每幅平场进行本底改正,由于天光变化快,每幅平场的计数值变化较快,需要先进行图像的归一化,再对多幅平场进行中值合并,获得一幅合并后的平场图像,如图3(b)。平场改正即观测图像除以合并后归一化的对应波段的平场图像。
3.1.3 图像改正与合并
科学图像改正需要本底改正和平场改正,基本公式为
(5)

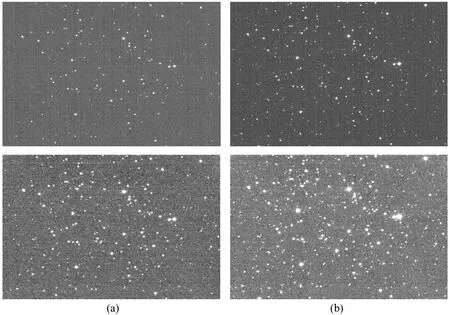
图4 M35的合并图像。(a)B波段;(b)V波段Fig.4 Combined images of M35. (a)B band;(b)V band
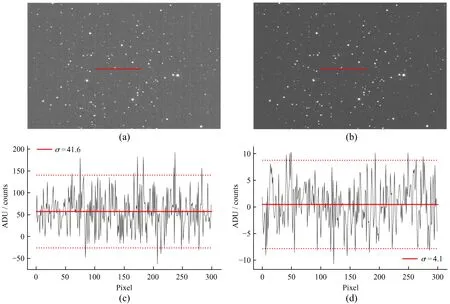
图5 单幅图像与合并后图像的背景值对比Fig.5 Comparison of background between single and combined image
3.2 背景估计与孔径测光
测光使用Python中的SEP(Python and C library for Source Extraction[11]and Photometry)软件包。在进行测光之前,程序通过对图像分为若干个相同大小的局部区域,并对每个区域迭代进行3-σClipping的方式构造图像的天光背景分布[12],再对扣除天光背景后的图像进行测光。图6为B波段图像的天光背景。

图6 B波段图像天光背景Fig.6 Background image in B band
孔径测光适用于星像间距较大的星场,例如疏散星团。对于密集星场或球状星团,点扩散函数(Point Spread Function, PSF)测光更为适合。如图7,R为测光孔径半径,不同的R值会影响测光结果。图8为仪器星等随测光孔径半径变化的生长曲线,在测光孔径半径为2倍半高全宽时曲线缓慢上升,而在3倍半高全宽处趋于稳定,故选择3倍半高全宽作为测光孔径的半径。
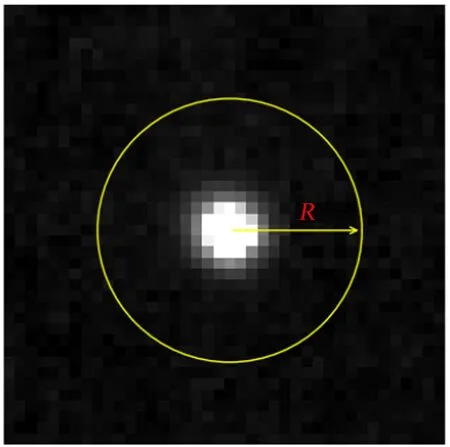
图7 孔径测光Fig.7 Aperture photometry
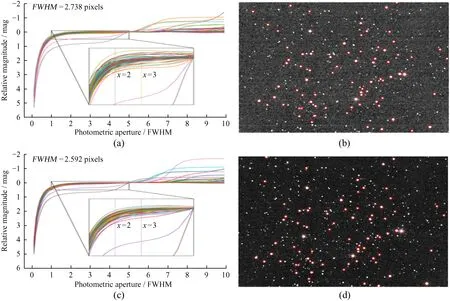
图8 星等随测光孔径的生长曲线Fig.8 Growth curve of magnitude with photometric aperture
(a)和(c)为(b)和(d)对应的仪器星等随测光孔径半径的生长曲线,每条曲线对应着一颗星使用不同测光孔径半径进行测光的结果,横坐标为测光孔径半径大小,单位为图中星像的平均半高全宽,纵坐标为仪器星等相对值,(a)和(b)为B波段数据,(c)和(d)为V波段数据。由图8可以看出,曲线先迅速上升,接着在一段区间较平缓,随后部分曲线又开始出现第二段上升,这是由于测光孔径半径过大使得孔径内不止一颗星造成的。
在SEP中,仪器星等及泊松误差的计算公式为[12]
m=-2.5log10F,
(6)
(7)
其中,A为测光孔径的面积(pixels);σ为通过孔径内天光背景估计的噪声标准差(ADU);F为孔径内计数值总和(ADU);g为增益(e-/ADU),由第1节的测试可得此处增益为3.5。计算后得到的星等误差如图9,(a)为B波段的星等误差,(b)为V波段的星等误差,横坐标为定标后的仪器星等,纵坐标为仪器星等误差。在100×2 s时,B波段的5σ探测极限约为16.422 mag,V波段的5σ探测极限约为16.461 mag。
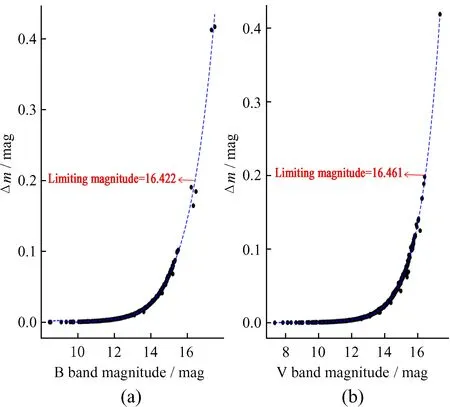
图9 星等误差图Fig.9 Magnitude-Δm diagram
3.3 流量定标
流量定标的方式为选取视场中信噪比高(S/N>100)的星,并剔除可能的变星,再与已知星表进行匹配,通过最小二乘法拟合获得从仪器星等系统到标准星等系统的星等零点、转换系数和颜色改正系数[13]。此次测试匹配的星表为Gaia DR3 Synthetic Photometry[14]。
用B和V表示星表中的星等值,b和v为对应波段的仪器星等,拟合公式为
B=k1+k2b+k3(b-v),
(8)
V=k4+k5v+k6(b-v).
(9)
拟合结果见表4。其中,k1和k4为仪器星等零点;k2和k5为转换系数;k3和k6为颜色改正系数;σ为拟合误差,包括定标后的仪器星等与星表星等的拟合残差标准差和各系数的拟合误差。

表4 流量定标系数Table 4 Factor of flux calibration
获得拟合参数后,我们将仪器星等代入(8)式和(9)式,得到在标准星等系统中的星等测量值Bobs,Vobs,与星表中的星等Bpred,Vpred进行对比,拟合结果与星等误差分布见图10,图中σ值为Bobs-Bpred和Vobs-Vpred的标准差,即为与已知星表匹配的测光精度,可见我们的测光精度优于0.02 mag。
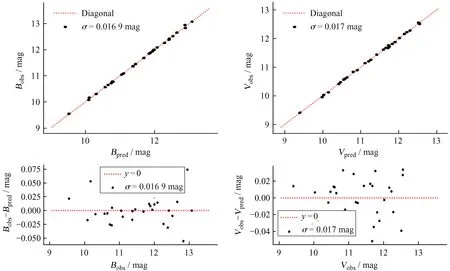
图10 星等拟合与误差分布Fig.10 Magnitude fitting and error distribution
3.4 极限星等
极限星等表示望远镜在特定曝光时间内,在一定信噪比时所能探测到最暗的星等。在图9的仪器星等误差图中,经过定标与拟合后计算得到,在100×2 s时,B波段5σ探测极限约为16.422 mag,V波段5σ探测极限约为16.461 mag。
3.5 天体测量定标
我们使用已有的软件Astrometry.net[15]对图像进行天体测量定标,再将图像中探测到的源与参考星表(Gaia DR3 Synthetic Photometry)进行对比,得到天体测量定标的外部误差,如图11,其中,Δαcosδ表示赤经方向误差,Δδ表示赤纬方向误差。由图11可见,在赤经、赤纬方向偏差的标准差都在0.2″内,精确性较良好。
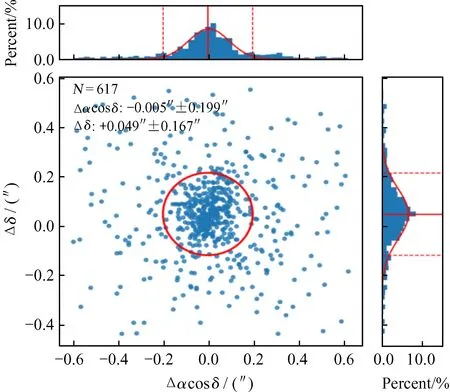
图11 天体测量定标外部误差Fig.11 External error of the astrometric calibration
4 变星的较差测光
4.1 参考星
由于大气扰动的存在和云雾天气的影响,即使是观测标准星也会出现亮度变化。对于20′的视场,我们可以认为视场内的星受到的大气影响相同,因此可以利用目标变星减去参考星的较差测光方式消除大气的影响[16]。因此,我们需要选择与目标源星等相近的参考星和检查星。表5与图12给出了目标变星和所选的参考星、检查星的信息。
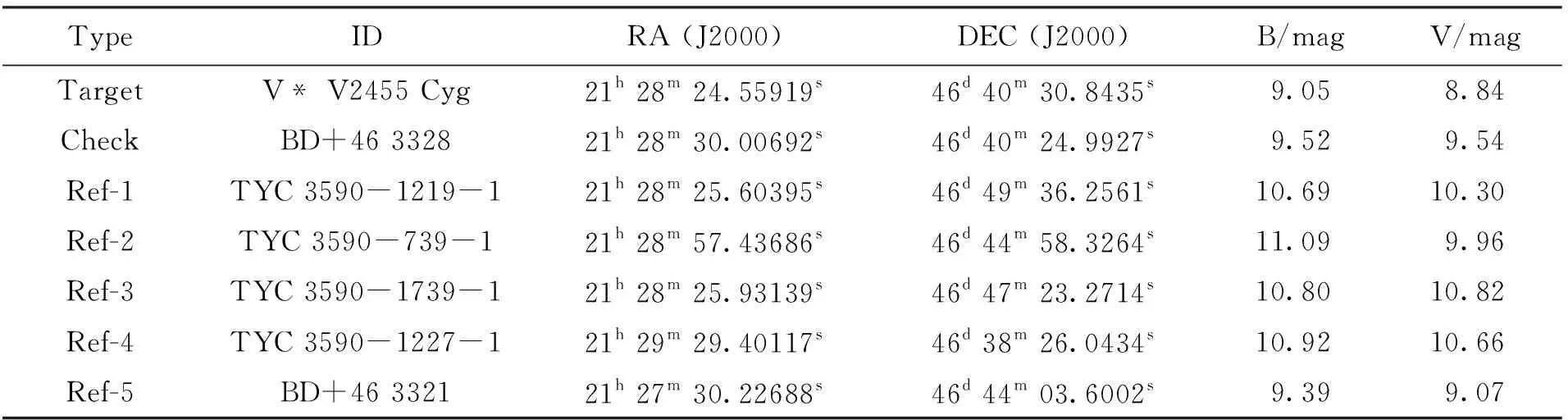
表5 目标星、检查星和参考星信息Table 5 Information of target star,check star and reference stars
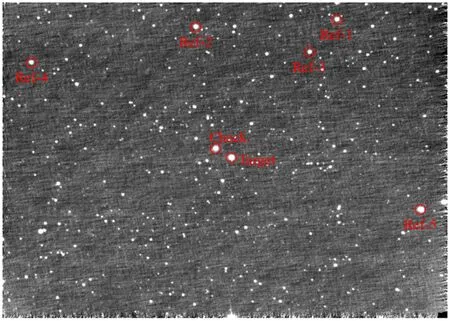
图12 测光星位置Fig.12 Position of stars for photometry
通过孔径测光我们得到了视场中5颗参考星的光变曲线如图13,(a)为选择的5颗参考星的光变曲线,黑色为平均光变曲线;(b)为目标星的光变曲线,红色和黑色曲线为较差前后的光变曲线。由图13可以看出,它们的曲线走势相近。因此,我们把(a)中5颗参考星取平均值,得到最后用来较差测光的参考曲线。(b)中 “raw light curve” 表示较差改正前的光变曲线,“final light curve” 表示较差改正后的光变曲线。由较差改正前后的光变曲线对比可以看出,经过改正后的光变曲线不受大气变化的影响了。
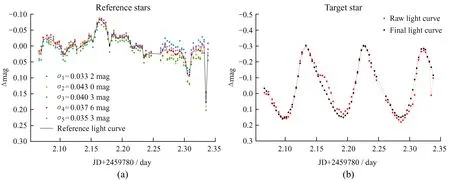
图13 参考星与目标星的光变曲线Fig.13 Light variation curves of reference stars and target star
4.2 光变曲线分析
对较差测光后的目标光变曲线进行傅里叶变换,得到以天的倒数为单位的能谱图,见图14。由图14得到的光变周期为0.097 08天,与已测定的光变周期(0.094 206天)相差4.13 min[8],相对误差为3%。
对光变曲线进行周期折叠,获得如图15的单周期光变曲线,横坐标为相位,3个颜色的数据点代表3个周期的数据。黑色曲线为拟合获得的连续光变曲线,由极大值与极小值的差值计算得到光变幅度为0.452 mag,而前人所测光变幅度为0.44 mag[8]。测量所得的光变周期和光变幅度都与前人的测量值十分接近。
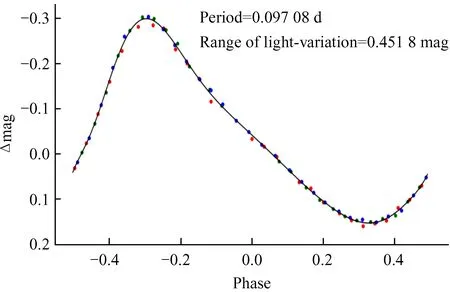
图15 周期折叠Fig.15 Folded period
4.3 较差测光精度
标准星作为亮度变化稳定的恒星,其到达望远镜前的亮度变化只受大气影响。所以另选择一颗亮度与目标星接近的标准星作为检查星,用其光变曲线减去参考曲线以消除大气影响,理论上得到的应该是一条星等值随时间不变的直线。但由于仪器的原因,这条曲线会在某个常数附近波动,而波动的范围即为较差测光精度。较差测光曲线如图16,通过计算多次测量的星等值的标准差σ,得到的较差测光精度为0.005 mag,与专业望远镜测试结果相比,精度较高[17]。
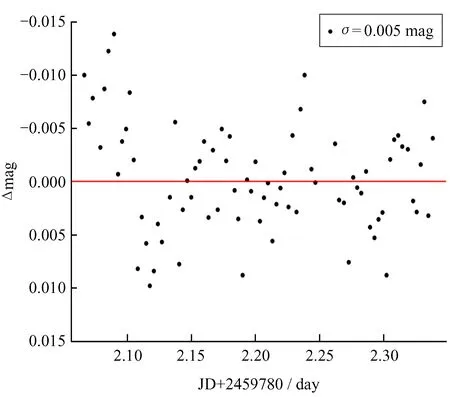
图16 较差测光精度Fig.16 Precision of differential photometry
5 总结与展望
本文使用科普级小望远镜与CMOS相机进行光学天文观测与数据处理,获得了较良好的测试结果。与已知星表匹配的测光精度优于0.02 mag,而较差测光精度约为0.005 mag,满足观测变星、系外行星或超新星等暂现源的天文观测测量精度需求。本文也验证了可以使用科普级望远镜与CMOS相机进行科学研究。
小望远镜的优势在于成本低、便携性和普及性,望远镜口径小的特点也避免了亮源易饱和的问题。如果能号召各地高校、中小学或众多天文爱好者进行联合科学观测,构建大型监测网络,可以开展对恒星稳定性的监测和瞬变源搜寻等许多天文观测课题,再利用大口径望远镜对捕捉到的异常现象进行后随观测,这将大大提高时域巡天的效率,实现对天体的监控。
致谢:感谢中国科学院国家天文台毛益明、张昱对望远镜的使用与数据处理提供的帮助。感谢国家天文台兴隆观测站的工作人员提供的观测条件和技术支持。
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:08:34
玉溪师范学院学报(2023年3期)2023-08-31 14:12:08
天文学报(2022年2期)2022-04-02 08:33:30
小学阅读指南·低年级版(2021年5期)2021-05-28 15:12:15
影像视觉(2017年10期)2018-01-31 23:20:26
广西大学学报(自然科学版)(2016年6期)2017-01-04 11:33:03
山东林业科技(2016年5期)2016-07-05 00:43:08
学生天地(2016年31期)2016-04-16 05:16:00
影像研究与医学应用(2015年6期)2015-08-15 00:45:20
视野(2012年2期)2012-07-26 02:50:20