基于UWB/PDR的无基础设施行人协同导航研究
2023-11-17 09:00黎昱杰黎蕾蕾卜继军许常燕
压电与声光 2023年5期
黎昱杰,黎蕾蕾,卜继军,许常燕,阳 洪
(1.中国电子科技集团公司第二十六研究所,重庆 400060;2重庆大学 航空航天学院,重庆 400044)
0 引言
如今在应急救援[1]、单兵作战等场景下,常因GNSS受限或干扰问题而导致无法有效地获取营救人员的位置信息,因此需要采用其他的导航方式。蓝牙[2]、5G[3]等普遍的定位方式需要提前架设基站或建立数据库,实时性较差,而行人航位推算技术(PDR)定位精度会随着时间而降低,无法长时间使用。利用在此类任务中行动人员常为编队作业的特点,在无足够参考基准的环境下,通过成员间相互观测构成约束关系,建立有效的相关性元素,并综合自身导航信息进行协同导航,可达到增强系统定位精度的目的。
针对无导航定位基础设施条件下行人编队定位问题,本文以惯性传感器为基础实施PDR自主导航[4],通过超宽带(UWB)进行编队组网,网内节点间信息共享及相互测距。采用基于扩展卡尔曼滤波器(EKF)的集中式协同导航算法,以所有节点的坐标、步长和航向角作为状态建立状态方程,以网内UWB的测距信息作为观测向量,建立观测方程,对网内所有节点位置信息进行约束。该方法只需将UWB传感器佩戴于行人即可,无需建立导航定位基准,能提高应急救援、单兵作战等编队任务的导航精度。3人协同试验表明,基于超宽带的集中式协同导航系统在不依靠基础设施的情况下,可使编队整体定位性能提高30%。
1 集中式协同导航系统模型
1.1 集中式协同导航状态模型

(1)
(2)

由单个节点扩展到多个节点,此时集中式协同导航系统的状态方程可表示为
(3)
其中任意一个节点都可自由移动而不受其他节点控制,因此,集中式协同定位的状态转移矩阵为一对角阵,表示为
(4)
1.2 集中式协同导航观测模型

(5)


(6)

Zk=HkΔXk+R
(7)
式中Zk为观测量;Hk为观测矩阵;R为观测噪声。
其中,
(8)
(9)
2 试验条件与方案设计
试验中,试验人员佩戴的试验装置包含MIMU模块、UWB模块、GNSS接收机和天线。MIMU模块固定于试验人员的腰部,其包含IMU模块和磁力计模块,测量试验人员行走时的加速度、姿态角和磁场强度,采样频率为100 Hz。UWB模块一般放置于试验人员的头顶,持续接收UWB测距信号,采样频率为1 Hz。试验人员携带的GNSS接收机在实验过程中持续接收GNSS数据,并通过与基站做差分GNSS得到试验人员真实轨迹,差分GNSS后的轨迹精度可达厘米级,可作为参考轨迹。
选取在空旷的室外操场进行协同导航试验,如图1所示,操场最外圈周长为300 m。图2为试验轨迹与UWB测距示意图。

图1 试验人员站位示意图
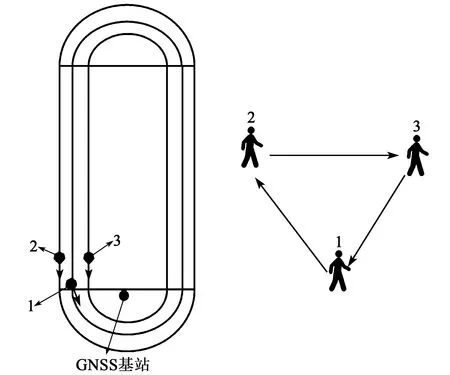
图2 试验轨迹与UWB测距示意图
试验人员试验起点分别为图2中的1、2和3节点。试验中,实验人员按照站位固定编队,并按各自跑道沿着操场跑道行走一周,试验时间约为5 min。场景中无明显遮挡物,UWB信号接收良好,卫星观测条件较好,整个实验过程中可观测卫星数据保持在10颗以上。同时,MIMU模块负责持续测量惯性数据,UWB模块负责人员间的相互测距,测距信息传播路径见图2。1、2、3节点互为测距关系,因此,试验共有3对测距关系。
3 实验测试与结果
图3为PDR、协同导航及GNSS基准轨迹图。由图可知,协同导航相对PDR算法定位轨迹更优,但仍有一定的误差。
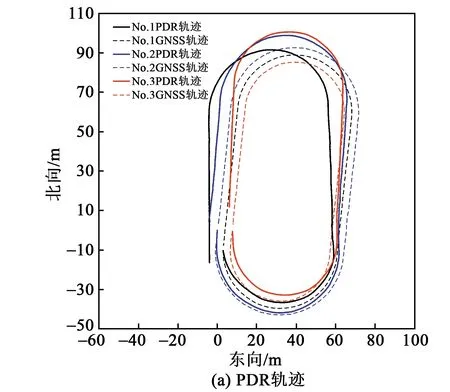
图3 PDR、协同导航与GNSS基准轨迹图
以差分GNSS轨迹为基准,分析PDR与协同导航误差。图4分别给出了3个节点的PDR算法与协同导航误差曲线,表1给出了各节点的最大误差和平均误差。
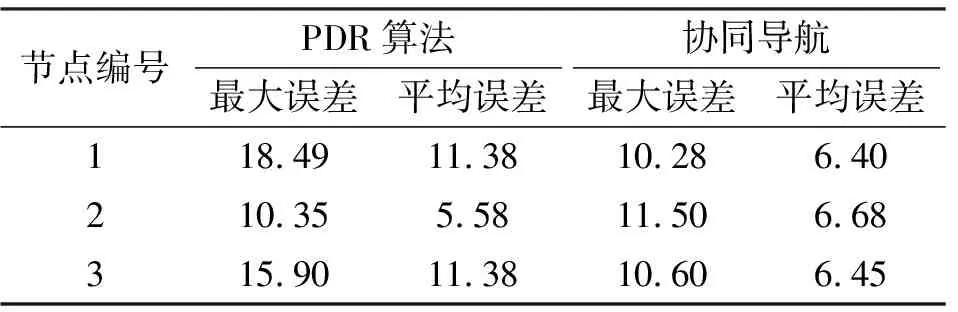
表1 PDR算法和协同导航算法误差统计表
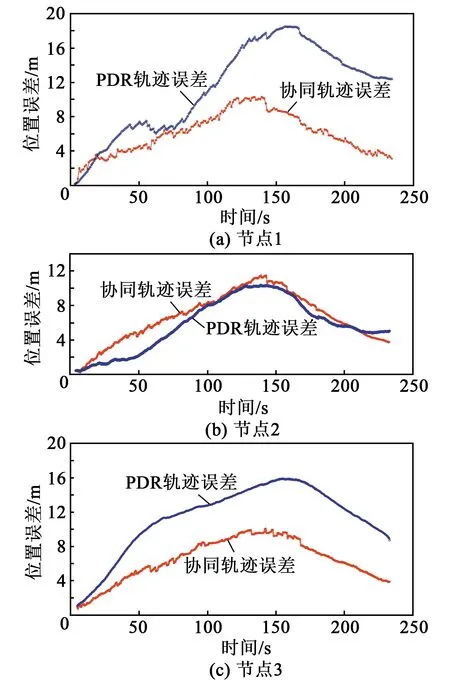
图4 三节点PDR和协同导航误差对比
由图4、表1可知,节点1的PDR算法最大误差和平均误差分别为18.49 m和11.38 m,协同导航的最大误差和平均误差分别为10.28 m和6.40 m;节点3的PDR算法最大误差和平均误差分别为15.9 m和11.38 m,协同导航的最大误差和平均误差分别为10.60 m和6.45 m;节点1、3的协同导航精度相较PDR算法分别提高了43.8%和43.9%,但节点2的PDR算法最大误差和平均误差分别为10.35 m和5.58 m,协同导航的最大误差和平均误差分别为11.5 m和6.68 m,协同导航误差增大至PDR误差的119.7%,略大于PDR误差,这是由于在无锚点条件下,协同导航牺牲了部分节点精度以换取总体精度的提高。
协同导航中一方面需要确定编队中节点的绝对位置,另一方面获取更优的节点间相对位置关系也是协同导航的关键问题,这将有利于队员获取全面的环境态势信息,协同完成任务。图5是协同导航以及PDR的节点间位置约束关系图。由图可见,在UWB技术的辅助下,节点间形成了稳定的相对位置关系。

图5 节点间位置约束关系图
4 结束语
本文针对GNSS受限以及基站设备建立难等无基础设施的场所,利用其任务特点:小规模、编队行动,将UWB组网测距与航位推算技术相结合,形成基于信息共享和测距约束的协同导航。3人协同导航试验表明,在无导航参考基准条件下,编队中各人员的定位性能可提高约30%。协同导航提高了编队的整体定位精度,相对单人导航在时空覆盖、时间效率、鲁棒性、故障容错与系统重构等方面具有独特优势,同时系统配置灵活,无需布设其它基础设施,适用于应急救援和单兵作战等编队任务。
猜你喜欢
军事文摘(2023年5期)2023-03-27
科学(2020年3期)2020-01-06
能源(2018年8期)2018-09-21
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2017年7期)2017-06-05
电子测试(2017年23期)2017-04-04
电气化铁道(2016年5期)2016-04-16
工业设计(2016年10期)2016-04-16
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
海军航空大学学报(2015年4期)2015-02-27