x-y-θz大行程无耦合并联压电微动平台的设计
2023-11-17 08:51:50朱春莉崔玉国胡志谊杨依领娄军强
压电与声光 2023年5期
陈 攀,朱春莉,崔玉国,胡志谊,杨依领,娄军强
(宁波大学 机械工程与力学学院,浙江 宁波 315211)
0 引言
微动平台是一种能够实现亚毫米行程、纳米定位的一种微位移机构。它通过其弹性单元体的弹性变形来产生微位移和传递力,构件少,无运动副之间的摩擦、磨损及传动间隙,因而被广泛应用于精密加工与测量等需要微纳定位的领域中。它在精密与超精密加工中,可用来实现刀具的微进给或加工误差的补偿[1];在精密与超精密测量中,可用来实现传感器的微调节[2]。在光纤对接中,可用来实现两光纤的精密对准[3]。
与其他驱动形式的微动平台相比,压电微动平台[4]体积小,响应速度快,输出力大,定位精度和位移分辨率高,无噪声,不发热,因此在微纳定位中应用广泛。Yang等[5]设计了一种两自由度柔性解耦微动平台,将Scott-Russell机构与杠杆机构进行串联,组成一个两级放大器,以此来克服压点陶瓷输出位移小的缺点,以平行四边形梁进行输入解耦,以三维双复合平行四边形梁进行输出解耦,平台x、y向的输出位移分别为148.1 μm和149.73 μm,位移耦合率分别为0.693%和0.637%。Zhu等[6]设计了一种并联两自由度的柔性微动平台,该平台提出了一种混合驱动机构,即将2个Scott-Russel机构与半桥机构进行组合,从而进行两级放大输出位移,平台的实体尺寸为165 mm ×145 mm×18 mm,x、y向的位移放大比分别为5.2和5.4,两方向的输出位移耦合率均低于1%。齐克奇等[7]提出了一种两自由度微动平台,该平台采用4个对称分布的嵌套式平行导向机构,实现平台的高刚度与自解耦,平台的一阶固有频率为444.76 Hz,2个轴的运动直线度分别为0.17%和0.16%。Choi等[8]提出了一种新型的x-y微动平台,能够实现每个轴±110 μm的最大输出位移,且位移分辨率均为4 nm,该平台在x、y向的固有频率分别为190 Hz和195 Hz。Tian等[9]设计了一种x-y-z三自由度的微动平台,其位移放大器将L形杠杆结构与半桥结构进行组合,采用凹形输入机构对压点驱动器与柔性机构进行位置导向,在3个方向上的最大输出位移分别为128.1 μm、131.3 μm和17.9 μm,输出耦合均小于2%,运动分辨率为8 nm。马立等[10]设计了一种三自由度微动平台,其采用平板铰链、圆形铰链及单边V形铰链导向的3-PRR结构,在x、y向和θz向上的行程分别为-11.32~11.41 μm、-12.47~12.76 μm和3.63′,对应的分辨率分别为71 nm、83 nm和1.35″。
目前学者设计的压电微动平台具有良好的静、动态性能基本都是x-y两自由度,结构不够紧凑,工作台面偏小,性能上位移行程偏小,运动存在耦合(平台沿某方向运动时会在其他方向产生寄生运动)。
本文基于柔顺桥式放大机构及双平行四连杆柔顺机构,设计了一种结构紧凑,工作台面大,位移行程大,运动无耦合,且能实现沿x、y轴平动,绕z轴转动的三自由度并联压电微动平台的新构型,并对其静、动态特性进行了分析及测试。
1 平台结构设计
压电微动平台能实现大行程的关键是驱动单元中位移放大机构的设计,本文采用双柔性薄板型的桥式放大机构进行位移放大,如图1(a)所示。其工作原理是对驱动单元中的压电执行器施加电压时,压电执行器的输出力使桥式放大机构的输入端产生横向变形,经过三角放大,桥式放大器的输出端产生与输入端位移成倍数关系的纵向输出位移,进而驱动微动平台产生较大的行程范围。台体采用对称式机构,如图1(b)所示,由6个结构尺寸相同的导向单元组成,对称分布在台体的四周,当平台在x向输出位移时,台体上下两侧的4个导向单元进行该方向的位移导向。当平台在y方向输出位移时,台体左右两侧的2个导向单元进行该方向的位移导向。同时导向单元之间的柔性薄板形成四连杆机构,进而形成双平行四连杆柔顺机构,对平台起到位移解耦的作用。
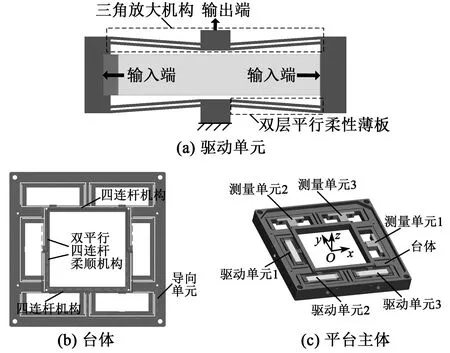
图1 x-y-qz并联平台结构
微动平台的主体结构如图1(c)所示,它由动台面、台体、驱动单元、测量单元及底板构成。当对驱动单元1中的压电执行器施加电压,对驱动单元2、3中的压电执行器不施加电压,从而实现平台沿x轴的平动位移;当驱动单元2、3中压电执行器同时施加相同的电压,而对驱动单元1中的压电执行器不施加电压,从而实现平台沿y轴的平动位移;当驱动单元3中的压电执行器施加电压,而对驱动单元1、2中的压电执行器不施加电压,从而实现平台绕z轴的逆时针转动。
2 有限元仿真
采用有限元软件Ansys对平台的应力、位移放大倍数和模态进行仿真分析。
2.1 应力分析
微动平台的最大应力产生于压电执行器预紧力和最大输出位移的共同作用下,如图2所示。微动平台在360 N的预紧力和150 V的输入电压作用下,平台的最大应力为145 MPa,小于所用材料铝7075的许用应力(524 MPa)。
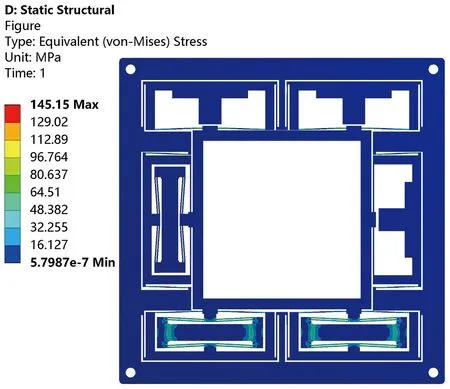
图2 平台应力的有限元分析结果
2.2 运动分析
对微动平台的位移放大倍数进行分析,在0.1 mm的输入位移作用下,平台在x、y方向的输出位移如图3所示。由图可知,微动平台在x、y方向的位移放大倍数分别为7.2和8.7。本文所用压电执行器标称位移为60 μm,在平台应变恢复力作用下会产生一定的位移损失(通常20%),这样平台在x、y、θz向可分别输出至少300 μm、400 μm和2.5 mrad的位移。同时由图还可看出,整个动台面成同一颜色,说明平台沿该方向严格平动,无耦合位移。
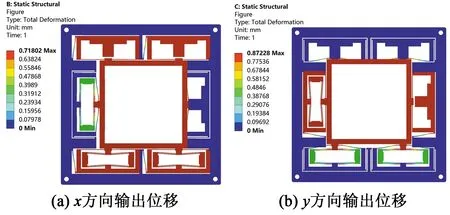
图3 平台位移放大倍数的有限元分析结果
2.3 模态分析
对微动平台的模态进行分析,前3阶模态的振型如图4所示。分别对应平台在x、θz、y向上的振型,对应的固有频率分别为100.2 Hz、133.1 Hz和118.2 Hz。由图可看出,平台在具备大行程情况下,仍具有较好的动态响应特性。

图4 平台前3阶模态的有限元分析结果
3 实验测试
3.1 位移特性测试
3.1.1 实验系统构成
图5为微动平台的位移测试系统,它由计算机、多功能数据卡(美国国家仪器有限公司,PCI 9263)、驱动电源(哈尔滨芯明天科技有限公司,E01.C3)、压电微动平台和电容传感器(德国米铱测试技术有限公司,CSE1)组成。该系统中各仪器参数:多功能数据卡上的A/D和D/A转换器的分辨率为16位,采样频率为100 kS/s;电源输出电压的纹波为10 mV,线性度为0.1%,带宽为0~2 kHz;电容传感器的测量范围为0~1 mm,线性度为0.5 μm,分辨率为0.75 nm。
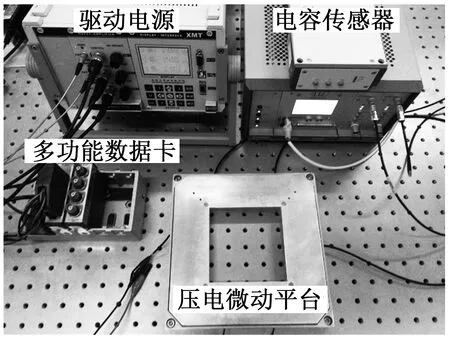
图5 平台位移测试系统
3.1.2 位移测试
对微动平台驱动单元1的压电执行器施加三角波形电压(0~150 V~0 V),测得平台各测量单元传感器的位移如图6(a)所示。由图可知,微动平台在x向的最大输出位移为306.1 μm,在y1和y2方向(即测量单元2、3)的耦合位移分别为0.75 μm和0.86 μm,对两者求平均值,从而可得到微动平台在y方向的耦合位移为0.81 μm,耦合率为0.26%;对微动平台驱动单元2、3的压电执行器同时施加三角波形电压(0~150 V~0 V),测得平台各测量单元传感器的位移如图6(b)所示。由图可知,在y1和y2方向微动平台的最大输出位移分别为401.97 μm和402.72 μm,对两者求平均值得到微动平台在y方向的最大输出位移为402.3 μm,同时测得平台在x方向存在的耦合位移为0.57 μm,耦合率为0.14%;对微动平台驱动单元3的压电执行器施加三角波形电压(0~150 V~0 V),平台各测量单元传感器测得的位移如图6(c)所示。由图可知,微动平台在y1和y2方向的最大输出位移分别为106.91 μm和365.61 μm,进而计算出平台在θz向的最大旋转角度为2.72 mrad。
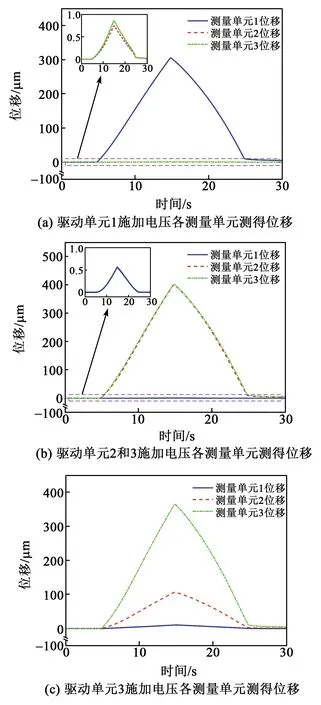
图6 平台的输出位移
3.1.3 分辨率
对平台3个方向的分辨率进行测试时,对相应的压电执行器施加微动平台可分辨的最小阶梯电压(0.012 V),测试结果如图7所示。由图可知,平台在x、y、θz向的位移分辨率分别为10 nm、10 nm和0.1 μrad。
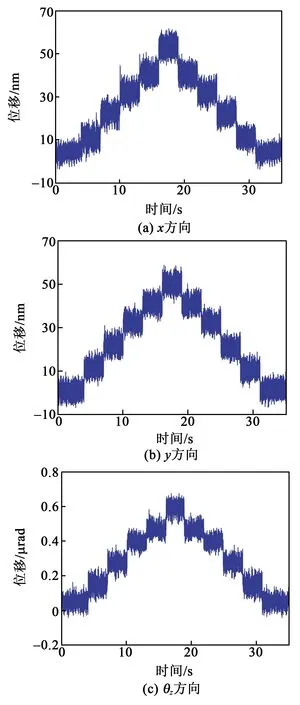
图7 平台的位移分辨率
3.2 频率响应测试
3.2.1 实验系统构成
图8为微动平台的频率响应测试系统,将加速度传感器粘在微动平台上,通过脉冲锤敲击微动平台给一个激励,平台产生的振动由加速度传感器测得,再经过FFT频谱分析仪进行信号分析处理,得到平台在各个方向上的频率响应曲线。
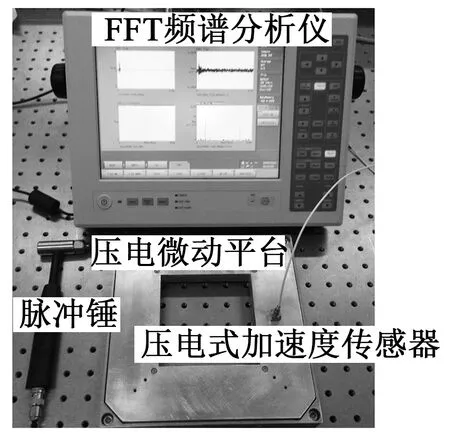
图8 平台频率响应测试系统
3.2.2 测量结果
图9为微动平台x、y、θz方向的频率响应测量结果。由图可知,微动平台在x、y、θz方向的固有频率分别为104.1 Hz、130.0 Hz和115.6 Hz,与有限元分析的结果基本一致。

图9 平台的频率响应
4 结束语
本文设计了一种可以沿x、y轴平动,绕z轴转动的三自由度并联压电微动平台,平台结构紧凑,工作台面大,位移行程大,可运动解耦。对平台的性能进行了分析测试,结果表明,平台在x、y、θz方向的最大位移分别为306.1 μm、402.3 μm、2.72 mrad,产生的耦合位移分别为0.81 μm、0.57 μm,位移分辨率分别为10 nm、10 nm、0.1 μrad,固有频率分别为104.1 Hz、130.0 Hz、115.6 Hz。
猜你喜欢
压电与声光(2019年1期)2019-02-22 09:46:06
雷达学报(2018年5期)2018-12-05 03:13:08
测控技术(2018年12期)2018-11-25 09:37:50
宇航计测技术(2018年3期)2018-09-08 02:21:26
铜仁学院学报(2018年6期)2018-07-05 09:47:40
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
柴油机设计与制造(2015年3期)2015-12-05 06:29:31
振动、测试与诊断(2014年6期)2014-03-01 01:14:55