一种圆形视场平台导引头对地快速搜索方法
2023-11-14 08:58陈伟何志杰李书成
电子制作 2023年20期
陈伟,何志杰,李书成
(陕西中天火箭技术股份有限公司,陕西西安,710025)
0 引言
对机载武器发射后截获的作战模式来说,导引头截获概率是一个关键性的指标,且受到各种因素包扩视场状态、弹道参数、载机雷达以及弹载测量装置的测量精度、目标机动能力等。其中视场状态又包括距离、视场大小、形状及搜索方式等方面。为提高导引头截获目标的概率,需要设计出更大的视场角,然而视场角增大时,进入导引头视场的背景辐射也必然更加复杂,从而导致导引头的作用距离减小和抗干扰能力下降。另一方面,光学导引头视场大小也受到光学成像质量及探测器能力的限制,难以实现视场和测角精度的统一。为解决视场过小目标截获困难的矛盾,导引头光学系统通常会进行空间搜索,用小的视场获得尽可能高的探测概率,这就需要对导引头视场及其搜索策略进行研究。张晓阳等人以红外成像导引头为例研究了不同视场形状和搜索策略[1],计算了不同搜索轨迹下的视场角面积,并研究了搜索场中不同点在截获场中的停留时间。徐丹等人在方形和圆形搜索轨迹的基础上提出了六边形轨迹的搜索策略,比较了方形、圆形和六边形搜索方式的优劣[2]。对于激光导引头,邓蕾等人仅从概率分布角度,用弹道仿真的方法分析了影响激光导引头的截获概率的主要因素[3],但没有对搜索方式进行深入分析。本文将以激光导引头为例,对导引头对地扫描时的特性进行分析,再对比不同搜索方式的差异。
1 激光导引头对地搜索模型
1.1 截获视场
激光制导武器攻击地面目标时,由于弹道弯曲通常呈俯冲状态,导引头搜索目标时视线角并不垂直于目标平面,导引头圆形截获视场在目标平面上的投影为椭圆形,椭圆长轴沿视线方向,短轴基本垂直视线方向,因此垂直视线方向覆盖区域较小。
图1 中m 为导引头,C 为视场中心,h 为导弹飞行高度;C 为视场中心,R 为弹目视场中心斜距。导引头视线角为q,圆视场角半径为θ。此时地面视场投影纵深为[4]:
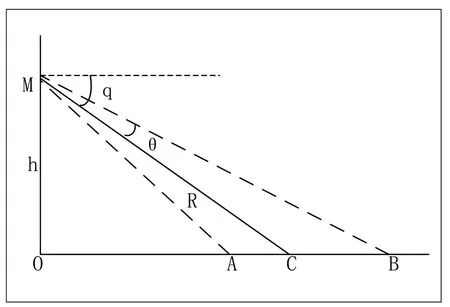
图1 导引头视场投影侧视图
视场宽度为:
视场边缘上任意一点F,距离视场中心的夹角即为截获视场角,设其在导引头视场平面的转角为γ,F 点在目标平面上的投影点坐标(Px、Pz)可表示为:
假设某弹道视线角30°,导引头半视场角5°时,截获视场投影如图2 所示。
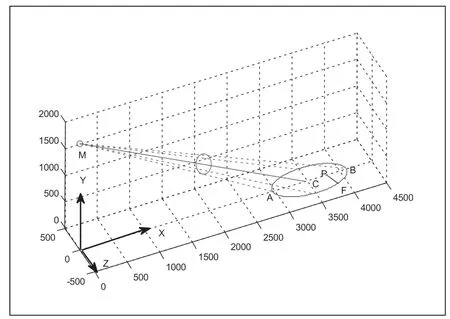
图2 导引头视场投影示意图
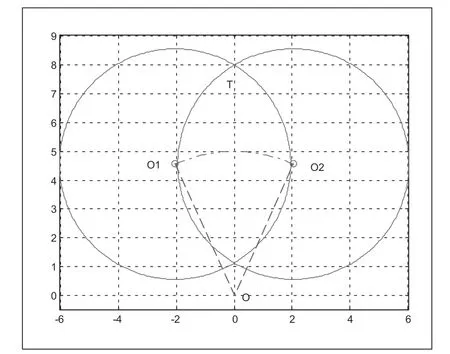
图3 特征点视场停留示意
1.2 搜素过程停留时间
导引头视场在搜素过程中持续移动,当视场按圆轨迹移动过程中,搜索视场中任意一点在截获视场中停留的时间与导引头扫描半径和搜索角速度相关,O 为搜索视场中心,T为目标点,O1、O2 为T 刚进入和离开时的截获视场中心。
假设搜索过程中以稳定速度扫描,则目标T 在市场中停留的时间为:
式中,∆t为单点在扫描过程中视场内的停留时间,R1为扫描半径,R2为半视场角,x为T 偏离截获视场中心的角度,ω0为平均搜索角速度。显然,当x 大于R2时,∆t为0,离截获视场中心越接近,停留时间越长。当扫描半径无限大时,即扫描方式变为“一”字形平扫,停留时间变成:
2 搜索方式比较
2.1 单点驻留搜索方式
考虑到导引头的识别过程需要一段时间,在需要的搜索区域内,搜索速度不能过快,为导引头识别目标提供必要的停留时间,同时搜索周期不能过长,过长的搜索周期会导致造成截获太晚。在满足导引头识别时间的前提下避免重复搜索,提高搜索效率。
根据综合位置误差中各项误差的分布规律,可以推断出指向误差分布规律应该是一个方向上平均分布、位置大小近似正态的分布,因此截获概率最大的区域应该在参考区域中心。由于误差方向的平均分布特点,搜索起始点无需特别指定,挑选与指向中心最为接近的扫描点即可,考虑到导引头视场区域的椭圆特征,利用椭圆长轴方向上视场覆盖大的特点,起始扫描点设在横向。考虑单点停留的方式搜索,也称为步进凝视扫描[5],比较“口”字形、“一”字形、“◇”形搜索路径,在不同弹道条件下各搜索路径所形成的搜索区域,如图4 所示。
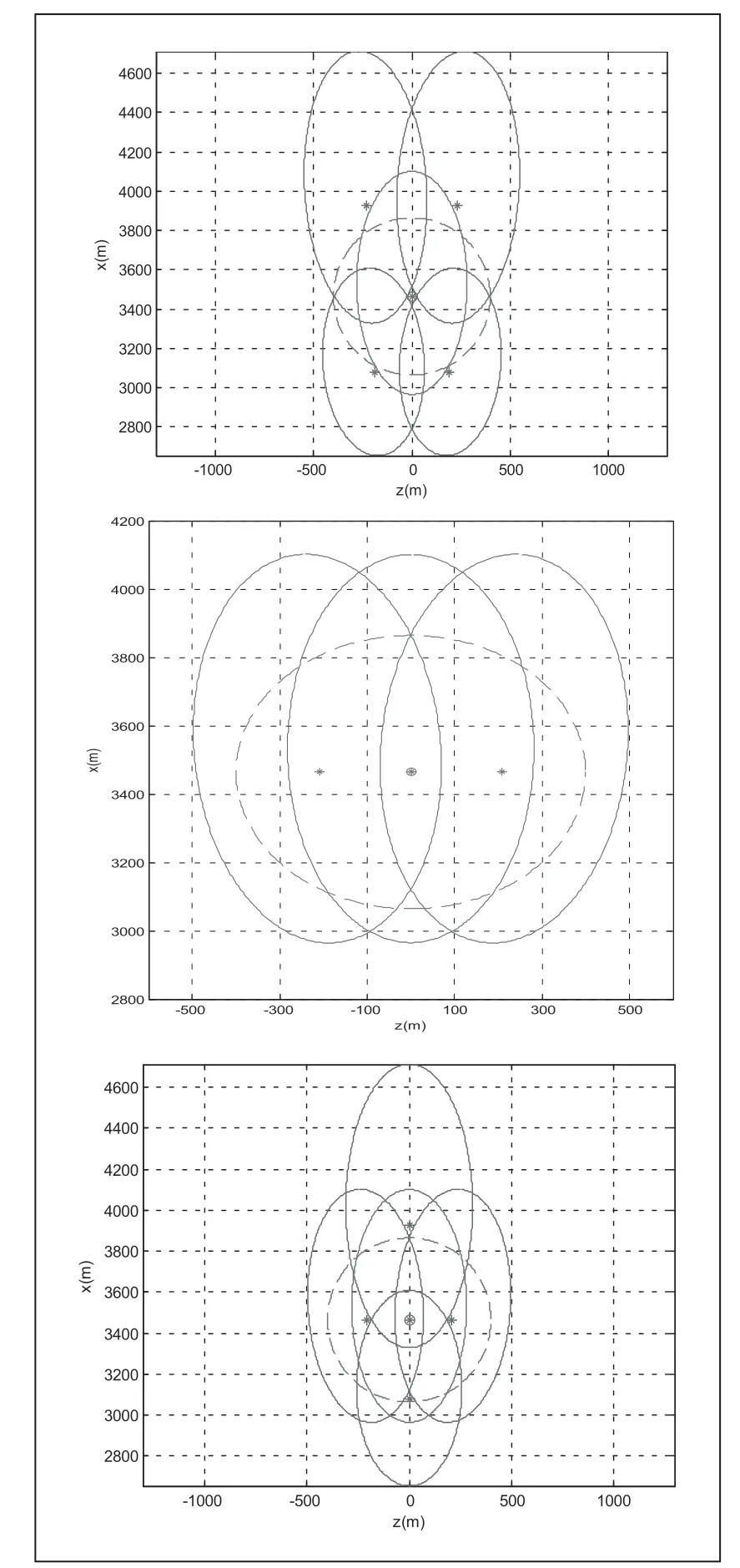
图4 30°视线角扫描区域
可以看出,在30°视线角下,“一”字形搜索即可很好覆盖400m 的参考区域,且扫描区域基本可以达到半径500m;“口”字形搜索也可满足参考区域要求,但在横向上余量较小,扫描角度越大,中心点存在漏扫区域,“◇”形搜索具有相对最优的区域覆盖性能。
60°视线角下,同样的搜索方式形成的搜索区域见图5。
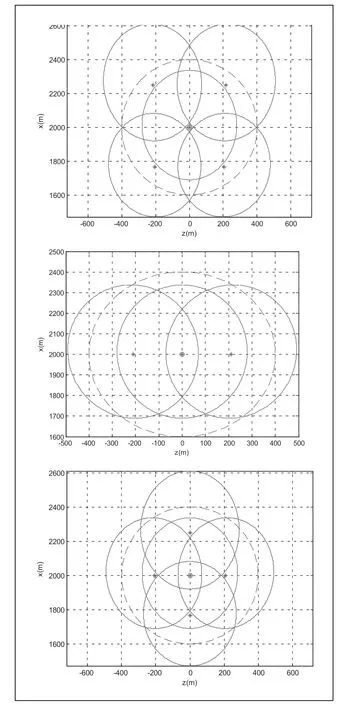
图5 60°视线角扫描区域
60°视线角条件下,“◇”形和“口”字形搜索可完全覆盖参考区域,“一”字形搜索无法完全覆盖参考区域。“◇”形搜索在中心区域有较好的重叠区域,随着扫描角度的变大,“口”字形可能出现中心漏扫,“◇”形比“口”字形有着更好搜索覆盖性,因此单点驻留模式下,“◇”字形对地搜索策略更合适。
2.2 连续移动搜索方式
取常用的连续圆周扫描搜索方式进行比较,在视线角不垂直目标平面的情况下,圆周扫描形成的扫描区域呈椭圆形,即便扫描的半锥角与截获视场角相等,扫描圆周前后半周的视场会部分重叠,视线角越小,重叠情况越严重。
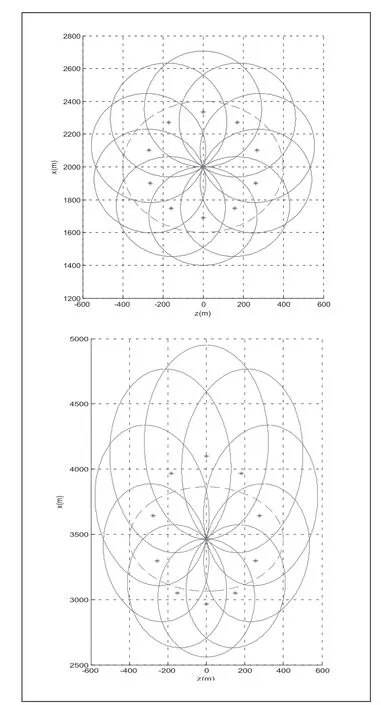
图6 60°与30°视线角圆周搜索覆盖区域示意图
相比单点驻留的搜素方式,连续圆周扫描的覆盖区域较为规则,在扫描幅度相同的条件下,扫描范围更大。尤其在视线角较小时,纵向扫描范围可以很大,在衔尾追击地面高速移动目标时非常有益于目标捕获。
2.3 搜索周期
在单点驻留搜索方式中,导引头视场需在各点上停留规定时间,该时间一般由导引头目标最短识别时间决定,假设该时间为0.4s,加上导引头在各点间转动的时间,取导引头在驻留点间转动的角速度均值为30°/s,则同等扫描角度下,驻留搜索方式下扫描一周的时间见表1。

表1 不同搜索路径的搜索周期
圆周扫描条件下,如果按视场边缘停留时间0.4s,则搜索周期很长,不符合使用要求,也不满足实际情况,按导引头视场中心停留时间0.4s 计算,则搜索角速度会根据扫描角度变化,扫描半径3°和4°时搜索周期分别为0.86s 和1.2s,此时视场边缘的停留时间降低至0.18s 和0.19s。当视场边缘附近点(边缘内1°)的停留时间也设定为0.4s 时,整体搜索周期增加至1.9s 和2.4s。
3 结论
“一”字形搜索受弹道条件约束,不适用于视线倾角较大的情况,在空地大俯冲角弹道下,该搜索方式不再适用。
“口”字形搜索基本可以覆盖各种弹道条件下的目标位置误差参考区域,且区域内各点视线驻留时间基本一致,缺点在于中心容易漏扫,同时搜索周期较长。
“◇”形搜索下参考区域的覆盖情况与“口”字形相近,驻留时间也相当,但没有中心漏扫区,同等扫描角度下搜索时间略短于“口”字形搜索。
圆周搜索也可覆盖各种弹道条件下的目标位置误差参考区域,且参考区各方向覆盖情况和停留时间较为平均,搜索周期稍短于“◇”字形搜索,缺点在于区域内各点停留时间不一致,边缘位置时间略短,中心处的时间相对较长,当放慢搜索速度,将边缘位置的停留时间增长至与“◇”字形搜索相当时,整体搜索周期也将与“◇”字形相当。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
中国光学(2021年6期)2021-11-25
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
中国医疗设备(2019年1期)2019-01-15
山东工业技术(2016年15期)2016-12-01
制导与引信(2016年3期)2016-03-20
信息记录材料(2016年4期)2016-03-11
火控雷达技术(2016年1期)2016-02-06
激光与红外(2015年10期)2015-03-23