波浪滑翔器智能海洋环境噪声观测系统
2023-11-13 03:33:14孙秀军张海嵩桑宏强于佩元
声学技术 2023年5期
孙秀军,张海嵩,桑宏强,周 莹,于佩元
(1.中国海洋大学海洋技术学院,山东青岛 266100;2.天津工业大学机械工程学院,天津 300387;3.中国海洋大学高等研究院,山东青岛 266100)
0 引 言
声音在海水中的传播具有衰减小、距离远等特点,因此可利用水声对海洋环境进行观测。而水声观测需要水声数据作为支撑,一般通过在水下布放声学传感器获取水声数据。由于水下复杂多变的环境,单纯依靠水下声学传感器系统难以满足工作需求。因此常见的海洋环境噪声系统一般需要搭配海洋移动观测平台来使用,如科考船以及水下无人机器人等。由于科考船运营费用较高,需要大量的人力物力,因此越来越多的声学观测系统选择搭载在无人移动观测平台上运行。通过搭载在无人移动观测平台上,海洋环境噪声观测系统能以更长续航、更加安全灵活的方式开展环境噪声观测工作。
当前常见的海洋无人移动观测平台有浮标(Buoys)、水下滑翔机(Underwater Glider)和波浪滑翔器(Wave Glider)等[1-3]。这几种平台都可搭载水声采集系统,进行海洋环境噪声的观测测量。其中,搭载声载荷的浮标平台可进行多剖面的移动观测,在剖面浮标上浮至水面时还可利用卫星通信模块与远程岸基通信,具有长时间、多剖面的声学观测能力,但剖面浮标的上浮和下潜阶段依赖于油泵电机工作,对声学观测会带来一定的干扰[4]。声学滑翔机通过改变自身浮力实现上浮下潜,利用两侧水翼获得水动力,通过改变重心实现滑翔运动,具有大尺度的海洋移动观测能力,当搭载上声载荷后,也需要考虑上浮下潜阶段电机运作对于声测量的干扰[5]。波浪滑翔器[1]作为一种新型的无人海气界面观测平台,具有可控性高、续航时间长以及航程大等优点。由于波浪滑翔器平台航行动力来源于波浪,平台自身运动对声学测量的干扰较小,并可利用太阳能为声载荷持续供电,使得平台十分适合用于长时间、大范围的水声测量工作。因此通过设计一款基于波浪滑翔器的智能海洋环境噪声观测系统,有助于获取高质量的海洋环境噪声数据。
在水声采集系统设计上,为了长时间采集水声数据,大量学者进行了相关研究。Marios等[6]设计了被动声学监听器,可搭载在ARGO浮标以及其他无人移动观测平台上进行实时的水声数据记录。Wang等[7]研制了一种由多个数字信号处理器构成的主从结构的多通道水声采集系统,可实现数周的水声数据连续采集。徐灵基等[8]设计了一种低噪声、宽带、高动态范围的水声接收机,可实现实时的模拟放大电路自动增益控制。赵宝平等[9]研制了以水下滑翔机为平台,集主控、采集和存储于一体的噪声测量软硬件系统。杨志国等[10]利用波浪滑翔器搭载自容式水听器在青岛近海开展了海上试验,评估了波浪滑翔器平台的本体噪声特性,验证了其搭载声学负载的可行性。
本文设计了一款波浪滑翔器智能海洋环境噪声观测系统,包含低功耗水声采集系统,并针对拖曳运行存在隐患的情况,基于平台与水声采集系统提出了一种配套的水声数据冗余存储方案,系统除常规的水声采集存储功能外,还可通过卫星通信实现数据回传以及远程控制功能,进一步提升系统的智能水平以及实用性。其中,低功耗水声采集系统基于意法半导体产品STM32进行开发,能够以低功耗进行单通道水声数据的水下自容式存储以及实时回传,确保海洋环境噪声测量工作的顺利进行。海洋环境噪声观测系统通过搭载在名为黑珍珠的波浪滑翔器[11]上,进行了近海试验。试验结果表明:系统稳定可靠,功耗较低,能保障数据安全。
1 系统设计
1.1 系统概述
本文所设计的波浪滑翔器智能海洋环境噪声观测系统如图1所示。系统结构包含以下部分:位于水下的声学采集电子舱和单通道水听器;位于水面船上的信号处理模块、波浪滑翔器主控模块以及卫星通信模块。当平台运动时,牵引机拖曳水下电子舱与单通道水听器向前运动。为了减小平台自噪声以及平台运动对于声学采集的干扰,在电子舱前加装重浮力链进行减振。

图1 波浪滑翔器海洋环境噪声观测系统组成示意图Fig.1 Schematic diagram of the wave glider based marine ambient noise measurement and observation system composition
系统总体电气工作流程如图2所示,通过一套完整的冗余存储系统完成声学数据的采集存储。水下电子舱中的水声采集系统将单通道水听器探头所采集到的模拟声学信号进行模数转换后,存储到电子舱内的存储卡中或者利用网络通信将信号回传至水面船上的主控模块;主控模块进行直接存储或实时处理后将处理结果发送至卫星通信模块;卫星通信模块进行数据回传。其中,主控模块具有平台控制、传感器数据记录以及卫星通信中继等功能,可将海洋环境噪声谱等信息利用卫星通信回传至波浪滑翔器岸基系统[12]。除数据回传外,通过卫星通信可下发指令至波浪滑翔器主控系统,进行平台导航避障控制或转发采集指令至水下电子舱水声采集系统,开启或关闭水声采集系统,设置水声采集系统的工作模式等,通过远程控制调整使波浪滑翔器水声采集系统能够较好地适应各类海洋环境噪声采样场景。
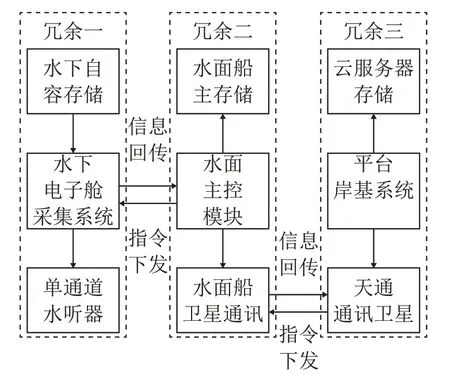
图2 系统总体电气工作流程Fig.2 Flow chart of the general electrical work of the system
1.2 低功耗水声采集系统设计
由于水声采集系统主要由波浪滑翔器平台进行供电,在平台电能有限的情况下,设计一款功耗较低的系统有助于延长平台的续航时间,运行范围更广、时间跨度更长的海洋环境噪声观测。进行低功耗设计时,应综合考虑平台航行以及水声采集系统的功耗,设定合适可行的设计目标。以“黑珍珠”波浪滑翔器典型配置为例,平台储能为640 Wh,平台自身导航通信平均功耗约为1.8 W,在阴天无光且无其他电负载的条件下,可连续工作15 d;为使平台能够在阴天无光天气下进行连续10 d的海洋环境噪声测量工作,则系统总功耗约为2.6 W,相当于声学采集系统的连续工作功耗需小于800 mW。
基于此目标本文进行了水声采集系统的设计研制工作。水声采集系统主体位于水面以下,包含单通道水听器以及由水下电子舱体保护的水下采集电路,本文主要对水下采集电路进行了设计。水下采集电路分为两部分:(1) 前端模拟与数字混合信号电路,进行声学信号模数转换;(2) 后端存储通信电路,进行原始声学数据存储传输。电路总体设计围绕低功耗、低自噪声以及长期续航这三个目标进行设计,包括采用合理的芯片选型,PCB布局以及阻抗匹配等技术以达成设计指标。水下采集电路构成如图3所示。

图3 水下采集电路构成框图Fig.3 Block diagram of underwater acquisition circuit composition
1.2.1 前端模数转换电路设计
由于本系统所采用的单通道水听器灵敏度级为-206 dBreV·μPa-1,自带增益为36 dB的前放电路,因此模数转换电路主要包含了前置RC滤波电路、全差分运放电路以及模数转换器三部分,核心器件为单通道全差分运放ADA4945以及四通道模数转换器ADS131A04。
ADA4945是一款低噪声、低失真以及低功耗的单通道全差分放大器,具有低直流失调电压、低直流失调电压漂移和出色的动态性能,适合应用于各种数据采集与信号处理应用。该器件具有两种工作模式,低功耗模式的损耗电流仅为1.4 mA,适合驱动高分辨率、高性能的模数转换器。对于ADA4945,利用由4个电阻组成的简单外部反馈网络即可实现差分增益配置,而其内部共模反馈环路能有效抑制偶数阶谐波失真。
ADS131A04是一款低功耗高精度,可进行四通道同步采样、精度为24 bit的Delta-sigma模数转换器,集成了低漂移内部参考电压以及内部负电荷泵以获取较高的有效分辨率。在8 kHz采样率时,ADS131A04单通道的功耗仅为7 mW,在只采用单通道进行采集时可通过程序控制以及闲置通道接地对采样通道数进行配置以进一步降低功耗以及通道串扰,实现性能上的优化。
1.2.2 后端存储通信电路设计
后端存储通信电路的设计基于的是意法半导体产品STM32F407ZGT6。这款MCU内核为cortex-M4,最高主频可达168 MHz,支持SPI、SDIO以及ETH接口。
STM32F407ZGT6提供了一个媒体访问控制器,可通过工业标准的独立介质接口或缩小的独立介质接口实现以太网通信。STM32F407需要通过一个外部物理接口设备来连接到物理总线。
硬件上,本设计采用LAN8720作为外部物理接口设备实现以太网通信。LAN8720是一款低功耗的10BASE-T/100BASE-TX物理层收发器,符合IEEE 802.3标准,支持通过一个标准的独立介质接口与以太网通信。LAN8720的硬件原理图如图4所示。软件上,通过在STM32F407上移植轻量化的TCP-IP协议来实现下位机与上位机的网络通信。

图4 LAN8720的硬件原理图Fig.4 Hardware schematic of LAN8720
STM32F407ZGT6有一个SD/SDIO/MMC主机接口,允许以高达48 MHz的速度传输数据。硬件上,SD卡的硬件原理图如图5所示,可在SD卡槽上插入大容量的Micro SD卡。软件上,通过在STM32上移植FATFS文件系统实现声学数据流的存储。

图5 SD卡的硬件原理图Fig.5 Hardware schematic of SD card
以采样频率为64 kHz、模数转换器的精度为24 bit的数据采集为例,1 s的数据量为192 kB,则单张512 GB内存卡理论上可以连续存储至少30 d的声学数据。并且由于采用了冗余存储方案,通过拓展信号处理模块的存储空间,能进一步延长声学采集续航时长。
1.2.3 软件设计
水下采集电路主程序工作流程如图6所示。系统上电后,主控芯片开始运行程序,首先进行以太网的初始化,开启以太网通信,获取上位机发送的采集配置指令,如ADC的采样频率、采样模式指令等。此指令可通过岸基端进行远程配置,也可设置预设参数,提高海洋环境噪声测量工作的灵活性。在利用配置指令对ADC进行初始化后开启采集,采集过程中通过周期性地监听由上位机下发的传输指令,判断进入存储模式或数据回传模式。当监听到上位机发送的回传指令时,进入数据回传模式,选择连续、周期或定时采集传输三种指令中的任一种采集模式,然后将原始声学数据按照协议打包成帧,利用双缓冲机制将数据通过以太网回传至上位机。当上位机存满或不再接收数据时,发送不再回传指令,此时进入存储模式,根据上位机配置信息初始化SD卡,选择连续、周期或定时采集存储,并将初始化信息回传上位机;SD卡初始化成功后,将声学数据通过双缓冲机制存入SD卡。最后,定期开启以太网回传水下采集系统状态以及部分声学数据。

图6 水下采集电路主程序工作流程Fig.6 Flow chart of the main program of underwater acquisition circuit
1.2.4 系统低功耗设计分析
本文主要从降低功能电路功耗以及提高供电效率两方面进行设计,以达到系统低功耗的设计目标。首先是降低功能电路功耗:前端模拟混合信号电路采用低功耗、高性能的单通道全差分运放ADA4945以及四通道模数转换器ADS131A04组成模拟混合信号通路,在进行单通道模数信号转换时,典型功耗低于100 mW;后端存储通信电路主控芯片采用STM32F407ZGT6,与常规的数字信号处理芯片TMS320C6748相比,典型功耗更低[4];外设以太网芯片采用LAN8720,在百兆以太网全双工通信时功耗不高于159 mW,与常见的低功耗以太网芯片相比,也有较好的性能。四款以太网芯片的功耗对比如表1所示。
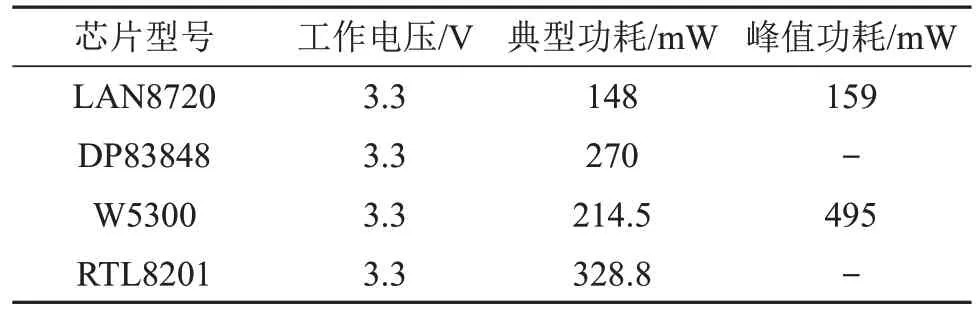
表1 四款低功耗以太网芯片功耗对比Table 1 Comparison of power consumption of four lowpower Ethernet chips
在电源管理部分,由于系统功耗较低,在相同电压条件下的电流较小,因此通过选用小电流负载条件下具有较高电源效率的DCDC电源芯片TPS560200作为系统的主要降压芯片。除此之外,考虑到电阻阻值与功耗成反比、电阻热噪声与电阻阻值成正比的关系,因此采取模拟信号通路小电阻、数字电路大电阻等方案,在系统功耗和系统自噪声之间进行平衡。
1.3 冗余存储方案设计
由于我国近海水下环境复杂,存在不平坦的礁石以及水下的渔网等,对水下拖曳式的设备造成了极大的威胁。如果仅采用常规声学采集系统水下电子舱自容存储数据的方式,当遭遇险情、拖曳绳缆断裂时,水下采集设备以及数据都无法得到及时抢救,从而导致海洋环境噪声测量活动失败。针对这一情况,为了确保数据的成功回收以及系统长期稳定续航,提高系统的智能化水平,基于波浪滑翔器平台提出了一种适配于平台与低功耗水声采集系统的冗余式数据存储方案,如图7所示。

图7 声学数据传输流程Fig.7 Flow chart of acoustic data transmission
方案中声学数据的最终去向分为三个:水下电子舱中的SD卡、水面船上的主控模块的SD以及云服务器端。当开启声学数据采集时,水下电子舱优先将声学数据传输至水面船主控模块上的SD卡进行存储,并利用主控模块多核多线程的特点,定期对数据进行傅里叶变换、谱级转换后得到海洋环境噪声谱,利用卫星传输至岸基服务端。在主控模块SD卡存满后,数据的流向转变至水下声学采集电路板上的大容量SD卡,并定时开启网络传输回传至水面船主控模块,在得到海洋环境噪声谱后回传至服务器端。除此之外,根据测量现场情况,可利用岸基远程设置数据流向,使系统通过灵活可选择的水下自容存储、水面船主存储以及云端服务器存储三重冗余存储模式充分保障数据回收的安全可靠。
表2对三种数据存储方式的效果进行了评估。水下电子舱存储的优点是获取了完备的原始数据,并且由于是自容式存储,功耗较低;缺点是水下电子舱位于水下,有丢失数据的风险,因此数据安全性较低。波浪滑翔器水面船存储的优势在于原始数据回传到了水面船上,成功回收的可能性较高;不足之处是通过以太网才能进行长距离高速率的传输,功耗相较于水下电子舱存储较高。云端服务器存储的优势在于数据存储到了云端服务器上,通过下载数据可以直接在电脑上对数据进行远程预览分析;缺点是卫星通信通过以太网获取数据,开启卫星通信与以太网的功耗高,并且受限于卫星通信速率,回传的数据不完整,且通信费用较高等。因此综合数据安全、数据完整性以及功耗费用等因素,水面船存储具有较高的数据安全性并能获取完备的数据,功耗和费用也较低。因此,在海洋环境噪声测量中优先考虑水面船存储。

表2 三类数据存储方式对比Table 2 Comparison of three types of data transmission methods
1.4 系统实物与集成
前端模拟与数字混合信号电路、存储通信电路两部分电路分立制板,通过接插件连接固定组成水下采集系统。水声采集系统与安装于水面船的信号处理模块实物如图8所示。水声采集系统安装在水密耐压的水下电子舱内,并通过电子舱两端的水密接插件与水听器、波浪滑翔器平台建立电气连接。

图8 水声采集系统及信号处理模块电路实物图Fig.8 The photos of hydroacoustic acquisition system and signal processing module circuit
2 试验验证
2.1 室内测试
为了验证低功耗声学采集电路的可行性,在室内搭载水听器进行了测试。首先输入单频正弦波信号,测试声学采集电路的动态特性。测试中利用信号发生源输出峰峰值为2 V,偏置为0,频率为3 200 Hz的正弦波信号。将此信号作为声学采集电路的输入信号,采样频率为64 kHz,测试结果如图9所示。由图9可以看出,采集得到的正弦信号无明显的尖峰以及杂刺,幅度也与输入信号相符。

图9 频率为3 200 Hz单频信号输入测试结果Fig.9 Test result of the 3 200 Hz single-frequency signal
其次进行采集系统的自噪声测试,根据现有试验条件对声学采集系统以及当前市面上的自容式水听器产品进行了室内的静水水池测试比对试验。试验结果如图10所示,其中,自容式产品的自噪声谱在真空无振动条件下测得。由图10可知,在测试频段内系统自噪声均低于0级海况,可以真实地反映海洋环境噪声。从测试结果看,本文所设计的声学采集系统与自容式水听器测得的噪声谱基本一致,说明声学采集系统能在一定程度上能真实地恢复海洋环境噪声。

图10 声学采集系统水池噪声测试结果Fig.10 Pool-test result of the acoustic acquisition system
2.2 整机评估
水声采集系统实测功耗如表3所示。自容式存储模式和以太网回传两种模式的实测功耗都低于800 mW,满足预期的低功耗设计指标。

表3 在自容式存储和以太网回传模式下的系统功耗Table 3 System power consumptions in two different modes
结合冗余存储方案,对海洋环境噪声测量系统进行整体评估,结果如表4所示。波浪滑翔器海洋环境噪声测量系统的典型总功耗不高于2 565 mW,在阴天条件下可连续采集至少10 d。并且通过下发卫星指令,可设置定时采集或周期性采集,从而进一步延长测量时长。在晴天条件下,由于波浪滑翔器可利用太阳能进行平台充能,因此限制海洋环境噪声测量时长的因素主要在于存储介质的容量,可通过集成大容量的存储模组延长系统续航时间。另外在波浪滑翔器水面船以及水下电子舱都存满的情况下,可定期开启卫星通信实时回传海洋环境噪声谱,实现云端服务器存储。

表4 波浪滑翔器海洋环境噪声测量系统续航评估Table 4 Endurance evaluation of the wave glider marine ambient noise measurement system
表5对“黑珍珠”波浪滑翔器平台常用的3种卫星通信方式进行了声学数据卫星回传有效性评估。常用的卫星通信方式有北斗短报文、天通通信以及铱星9523模块通信。由于北斗短报文的通信速率较低,因此不适合用于大规模数据量的回传,需要在对数据进行多级处理后,回传信息量较小的声信号特征;天通卫星通信速率较高,理论通信速率达到9 600 bit·s-1,考虑到实际因素以及单片机中进行傅里叶变化时输出点数一般为2N(N为自然数)的特点,因此将实际传输速率上限设定为8 192 bit·s-1,相当于1 s可传输1 024 Bytes,以64 kHz采样率为例,如果以32 bit浮点数格式来传输海洋环境噪声频谱时,可传输256个频点的频谱分贝值,此时频率分辨率为250 Hz;如果以8位无符号整形数形式进行传输,即以分贝的整数形式进行表示,对回传的谱级信息进行压缩,此时可回传1 024个频点的频谱分贝值,频率分辨率为62.5 Hz,分辨率有了较大的提高。在对频率分辨率有更高要求的场合,还可只回传单边谱,在回传数据量不变的前提下,进一步提升回传频谱的频率分辨率;同理,如果利用铱星卫星通信传输上述点数的信息,至少需要4 s才能完成传输,实时性有所下降。
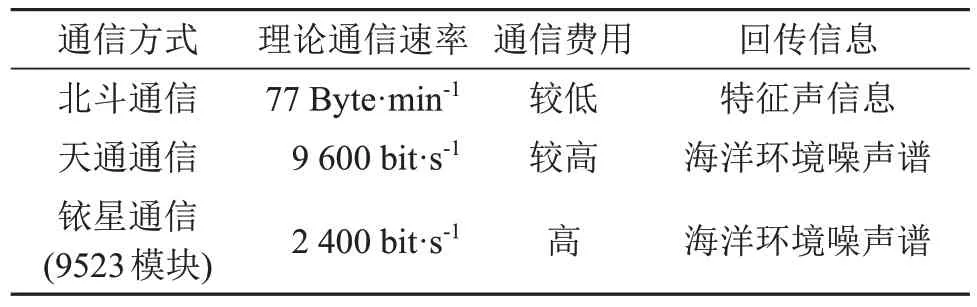
表5 3种卫星回传声学数据方法评估Table 5 Evaluation of three satellite echo acoustic data methods
考虑到海况以及一定海域内的带宽有限等情况,实际情况中很可能达不到理论传输速率,传输稳定性也受到一定影响。因此在实际应用中,需要采取降低单次信息回传的点数、增加校验码或者单帧分包发送等数据传办理方法,以确保单次回传信息的完整性。
除此之外,由于天通通信以及铱星通信(9523模块)都属于大数据量通信,功耗较高。以天通通信为例,通信开启时的典型功耗约为6 W,持续运行将对平台产生较大的供电负担,为了保证平台的长期运行,只能选择在特定时段开启通信,或者选择降低通信频次来减轻平台负担。
卫星通信还可用于岸基对系统进行远程操控,提高系统的智能化水平。如检测到异常后降低采样频率从而提高频率分辨率、更改采样模式从而延长系统续航时间等。利用波浪滑翔器平台点位可控的特点,可远程控制平台对目标点位进行长期锚泊走航实现定点观测,或者设置直线走航采集较大范围的海洋环境噪声,在遭遇台风等极端险情时,可临时变更观测点位,提高系统存活率。结合上述分析,表6对整机性能指标进行了总结。

表6 波浪滑翔器智能海洋环境噪声测量系统性能指标Table 6 Performance indices of the wave glider intelligent marine environment noise measurement system performance index
2.3 青岛近海海上测试
在2021年12月青岛近海进行了海上测试,以64 kHz的采样率测得了海洋环境噪声数据。海试中的声学数据存储在水面船上的信号处理模块之中,降低由水下采集模块丢失所可能带来的数据风险。图11和图12分别是在实际海试时所测到的海洋环境噪声原始时域波形以及海洋环境噪声功率谱。

图11 青岛近海海洋环境噪声原始时域波形Fig.11 Original time domain waveform of marine ambient noise in Qingdao offshore area
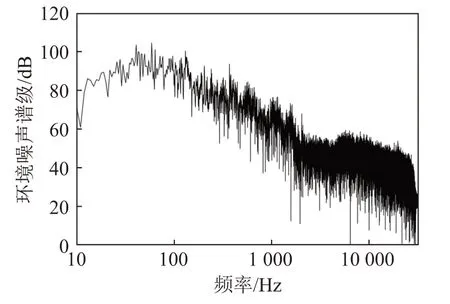
图12 青岛近海海洋环境噪声谱级Fig.12 Power spectrum of marine ambient noise in Qingdao offshore area
3 结 论
本文基于波浪滑翔器设计了一款具有低功耗、冗余存储、数据安全和远程控制等优点的智能海洋环境噪声观测系统。在进行水下自容式存储时,水声采集系统平均功耗不高于405 mW,整机总功耗为2 205 mW,在阴天无太阳可充能条件下,可连续工作12 d;进行网络通信回传声学数据时,水声采集系统平均功耗不高于765 mW,整机总功耗为2 565 mW,阴天条件下可连续工作10 d;晴天条件下,采集续航时长将由本地存储介质决定;本地存储介质存满后可通过卫星回传一定点数的海洋环境噪声谱继续进行测量工作;冗余存储系统具有存储方便的优点,可保障海洋环境噪声观测活动顺利进行。室内测试以及海上测试结果表明,波浪滑翔器智能海洋环境噪声观测系统的本底噪低于0级海况,能够真实地反映海洋环境噪声,海试中实测数据也与文献所测得的海洋环境噪声基本相符,说明系统具有一定的实用性,能够满足海洋环境噪声观测需求,具有较好的应用前景。
猜你喜欢
学苑创造·A版(2024年5期)2024-06-10 21:55:57
军民两用技术与产品(2021年7期)2021-10-13 08:12:20
电子制作(2018年23期)2018-12-26 01:01:04
测控技术(2018年11期)2018-12-07 05:49:22
小学时代(2017年16期)2017-06-19 19:33:19
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
海洋科学进展(2016年3期)2016-08-12 06:45:20
中国卫生标准管理(2015年16期)2016-01-20 09:26:15