垂直起降固定翼无人机混合电推进系统设计与仿真研究
2023-11-13 01:15:42熊志豪郑宇惟
重庆交通大学学报(自然科学版) 2023年10期
邓 涛,谭 溪,熊志豪 ,郑宇惟
(1. 重庆交通大学 航空学院,重庆 400074;2. 重庆交通大学 机电与车辆工程学院,重庆 400074;3. 绿色航空能源动力重庆市重点实验室,重庆 401120;4. 重庆交通大学 绿色航空技术研究院,重庆 401120)
0 引 言
随着航空工业发展,为解决环境污染以及能源危机问题,电推进系统成为飞机动力系统的重要发展方向,但受限于电池能量密度,纯电推进飞行器航时短是当前无法解决的难题[1],相比之下,混合动力电推进系统较纯电动力系统具有非常可观的应用优势,可显著提高飞行器的综合性能。
针对混合动力电推进系统在航空方面的应用,现已取得了一定成果,C.FRIEDRICH等[2]进行了单座教练机混合电推进系统的设计,并在ISR任务剖面下对该混合动力系统进行了优化匹配,并对相同条件下的传统、串联、并联、纯电动推进系统相对性能进行评估,指出并联式混合动力更适合于固定翼飞行器的应用,针对不同的起飞重量的飞机,提出了混合电推进系统的拓扑设计方法;E.SILVAS等[3]提出了系统级的混合电推进设计与优化方法,为混合电推进系统的建模研究提供参考;C.PORNET等[4]通过设置飞行工况将混合电推进飞行器与传统动力飞行器进行比较,明确了混合度对飞行性能的影响;D.F.FINGER等[5]研究了串联和并联混电系统在传统固定翼无人机设计过程中的应用;H.LIU等[6]针对燃料电池混合动力无人机,提出了基于在线动态规划和分层MPC的能量管理策略;G.CHEN等[7]针对可垂直起降无人机提出了一种新型串联混合动力系统设计优化方法;刘福佳等[8]对轻型电动力飞机的推进系统参数匹配进行了深入研究,为电推进系统的优化设计提供依据;毛建国等[9]设计了一个适用于小型航空活塞发动机的并联式混合动力系统,并通过实验建模法建立了混合动力系统逆向仿真模型。针对典型任务剖面,综合考虑多能源动力系统,刘莉等[10]提出了一种考虑全机重量能量耦合关系的总体设计方法和任务剖面驱动的能量管理策略,可根据不同任务剖面的功率需求合理配置能源系统的功率。
针对四旋翼和固定翼无人机的混合动力研究已有较为成熟的成果,而针对垂直起降固定翼无人机的研究还比较少,笔者根据某型垂直起降固定翼无人机的自身结构、性能等参数,提出了适用于该类型无人机的混合动力系统构型、参数匹配与选型方法,并采用规则控制策略在MATLAB/Simulink中以验证该混合动力系统模型的合理性。
1 动力系统构型设计
油电混合动力系统主要分为串联式、并联式和混联式等结构。并联式系统发动机、电机尺寸小,效率提高,能实现全推进功率冗余且具有多种工作模式,但控制系统相对复杂;混联式系统能量分流合理,效率、燃油经济性和可靠性高,但机构复杂整体质量重,在需考虑提升有效载荷提高悬停时间时,一般不采纳此类构型;串联式系统发动机不直接提供动力,只驱动发电机提供电能带动螺旋桨转动,能够实现发动机与电机的解耦,使发动机能够始终在最佳工况点附近稳定运转,效率高、排放性能好,能量分配管理灵活,适用于推进电机的分布式布局。
以某型垂直起降固定翼无人机为参考,该机型采用结构与串联式相同的增程式油电混合电推进系统,该动力系统具体构型如图1。在垂起阶段,由发动机-发电机供往垂直动力系统的电能与动力电池的电能耦合后,输入到4个旋翼的电机,水平动力系统不工作;在巡航阶段,供往水平动力系统的电能输入到电调1及驱动水平电机1;发动机输出功率若有富余,且电池模块中的动力电池电量较低时,可为动力电池充电。

图1 无人机增程式混合动力系统Fig. 1 Incremental hybrid system for UAV
2 动力系统参数匹配与选型
垂直起降固定翼无人机油电混合电推进系统设计过程中,要求动力系统满足各飞行状态下的最大升力与功率需求。根据任务段功率需求,初步选出电机与螺旋桨集合,计算电机与螺旋桨组合的最大升力/推力与力效,选择满足最大升力/推力需求且力效最高的组合。设计选型流程如图2。

图2 匹配流程Fig. 2 Matching process
以无人机总体性能设计参数作为电推进系统参数匹配的初始条件,如表1。

表1 混合动力垂起固定翼无人机参数
动力系统参数匹配要依据无人机飞行剖面各状态所需功率和能量,其功率和能量可根据飞机总体设计参数要求进行飞行动力学计算。
2.1 垂直动力系统功率匹配与选型
根据任务段功率需求初步选择备选电机,根据备选电机选择合适的螺旋桨,计算电机+螺旋桨组合的最大升力/推力与力效,选择满足最大升力/推力需求且力效最高的组合。
根据参考机型设计指标,起飞阶段无人机以四旋翼模态在30 s内垂直上升到50 m高度,在此阶段假设前20 s是匀加速运动,后10 s是匀速运动,则在起飞时上升的加速度a为0.125 m/s2,单个旋翼所需提供的升力如式(1):
F0=M(g+a)/n
(1)
式中:F0为加速上升单个旋翼所提供的升力;M为无人机重量;g为重力加速度;n为旋翼数量。
考虑到安全裕度与操控性,取裕度系数为1.4,则加速上升时单个旋翼需提供的升力为295.27 N。
当无人机在空中悬停时,其拉力等于重力:
F1=Mg/n
(2)
式中:F1为悬停时单个旋翼所提供的升力。
考虑到安全裕度与操控性,取裕度系数1.4,则悬停时单个旋翼需提供的升力为291.55 N。
因此,初步选用T-Motor U15系列电机作为升力电动机备选。
由文献[11]中可知,桨叶数越多,组合动力系统的力效越小,综合考虑螺旋桨的动力学平衡,根据式(3)确定出旋翼叶片数量为2。
(3)

在选择旋翼直径时,首先计算使推进系统力效最大时的直径,然后根据电机的安全边界确定最优直径。
推进系统力效与旋翼直径关系如式(4):
(4)
式中:CT为拉力系数;CM为扭矩系数;Dp为螺旋桨直径;Rm为电机内阻;ρ为空气密度;Thover为旋翼拉力;KE为电机反电动势常数。
由式(4)可知,推进系统力效随旋翼直径增大而增大,力效达到最大值后,又随旋翼直径增大而减小,则推进系统力效最大时的旋翼直径计算为:
(5)
考虑到电机安全边界限制情况,在实际研究中选择的旋翼直径会比DP小。因此,选择满足最大升力需求时的旋翼直径DPMax计算为:
(6)
式中:Im为给电机工作电流;Im0为初始电流;ImMax为最大电流;UMax为最大电压。
代入数据后计算所得DpMax为32.65英寸,考虑到升力的安全裕度与市面上已有的标准旋翼,选择旋翼的型号为G40×13。
为验证电机与旋翼的组合所能产生的升力是否满足无人机最大升力的需求。计算组合系统所能产生的最大升力TPMax:
(7)
相关系数计算如式(8)、式(9):
(8)
(9)
式中:φP为螺距角;kT0、kM0、kM1、kM2是与旋翼叶型相关的参数,根据文献[12],均可视为常数。
计算可得该组合能提供的最大升力为364.19 N,大于上升所需拉力约20%,满足选型要求。将无人机上升所需拉力带入式(4)计算可得悬停时所需功率为19.44 kW,即单个旋翼悬停时所需功率为4.86 kW;当无人机以0.125 m/s2的加速度上升时,单个旋翼需产生的升力为295.27 N,则四旋翼加速上升时所需功率为20.64 kW,单个旋翼所需功率为5.16 kW。
综合考虑垂直方向所需升力、功率的需求,升力电动机选择T-Motor U15 II-KV100,旋翼选择G40×13。该组合负载测试数据如表2,在75%油门时,该组合的输出功率约为4.95 kW,满足悬停时功率需求;在85%油门时,该组合输出功率约为6.12 kW,大于加速上升时的功率需求。
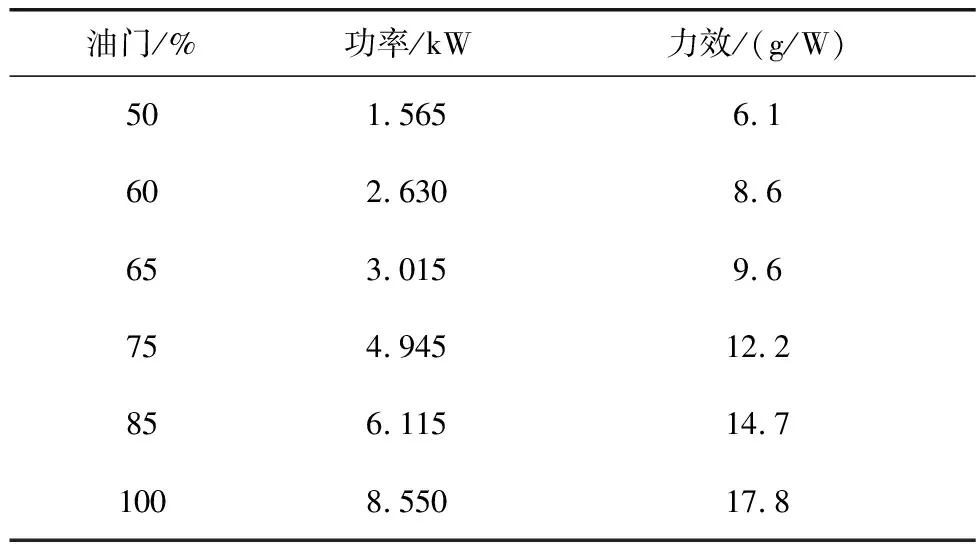
表2 电机与旋翼组合数据
2.2 水平动力系统功率匹配与选型
垂直起降固定翼无人机达到一定飞行速度和高度后,无人机由四旋翼垂直起降模态转换为固定翼平飞模态。在该模态下飞行时的基本受力分析如图3。
本研究中除躯体疼痛、精力和社会功能 3 个维度外,其余维度 Cronbach’s α 系数均>0.7。既往研究显示社会功能和精力维度的内部一致性信度普遍较差(王山等[4] 研究中为 0.41 和 0.65,李鲁等[10] 研究中为 0.39 和 0.66,于影等[11]研究中为0.27 和 0.55),与本研究结果类似。本研究集合效度定标试验成功率为 100.0%,区分效度定标试验成功率为 98.37%,量表集合效度和区分效度均很好,高于既往研究报道[4,10]。说明 SF-36 量表应用于海勤人员健康生命质量评价具有较好的信度和良好的效度。
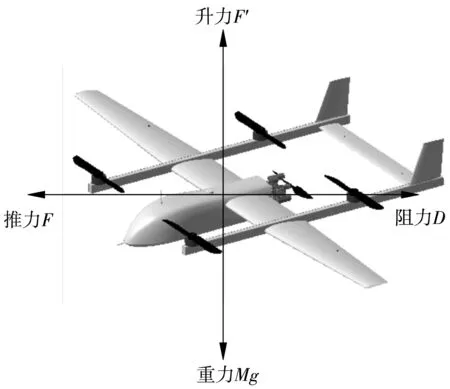
图3 无人机平飞受力分析Fig. 3 Force analysis of UAV in horizontal flight
当无人机以某一恒定速度水平飞行时,其升力F′等于重力Mg,阻力D等于巡航推力F,计算如下:
F′=0.5ρV2SCL
(10)
D=0.5ρV2SCD
(11)
式中:CL、CD分别为升力系数、阻力系数;S为翼面积。
垂直起降固定翼无人机水平巡航的需用功率如式(12):
(12)
式中:F为巡航推力;V为巡航速度;K=CL/CD为升阻比。
根据参考无人机数据,取升阻比为12。经计算,考虑安全裕度系数后,无人机在固定翼模态下巡航时所需功率为3.25 kW,最大速度水平飞行时所需功率为4.13 kW,电动机与推力桨组合所能提供的功率须满足无人机水平飞行时的最大需求功率,并且在巡航状态的效率应该最高。按照2.1节选择升力电动机与旋翼的方法进行选型,推力电机选择T_Moter U13 II-KV65,推力桨选择G32×11(碳纤维),该组合负载测试数据如表3。
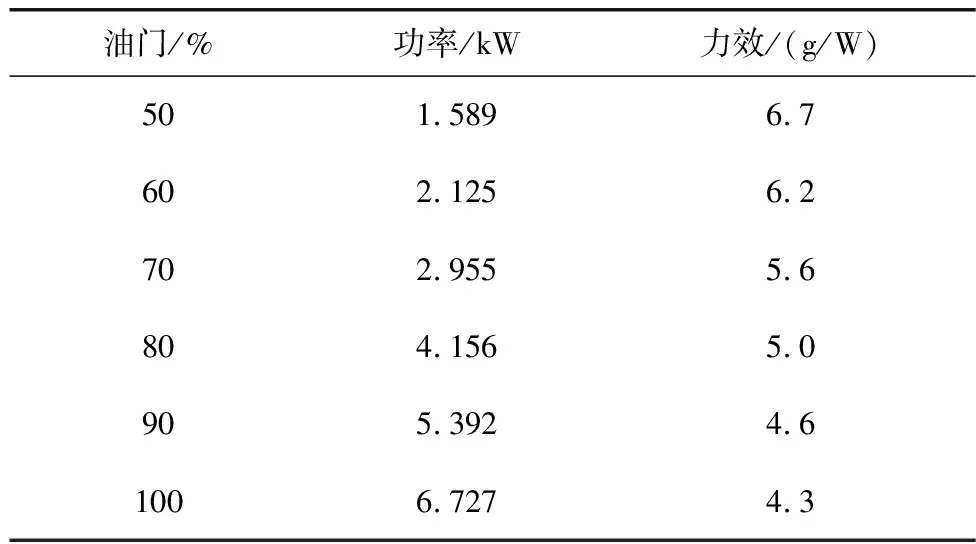
表3 电机与推力桨组合数据
由表3可知,在油门点为70%~80%时可以满足巡航实际功率需求,在油门点为80%~90%时可满足无人机以最大速度水平飞行所需功率。
针对发动机选型,考虑到发动机输出功率的高度修正系数在海拔1 000 m时为0.636,且与发电机之间存在损耗,因此选择DLE170M发动机。发电机选择时输出功率须满足后端作动部件的功率需求且能与发动机高效搭配,故选择三相无刷交流发电机S676-800U-02,在7 500 rpn时为11.4 kW,其转速区间与DLE170M发动机相同,且不用额外的减速装置。
2.3 匹配结果分析
增程式混合电推进系统的最大功率需大于最大可持续功率,匹配结果验证分析如表4。由表4可知,动力系统匹配结果满足设计要求。
(13)
式中:T0为螺旋桨静拉力;Ω为螺旋桨转速;TP为螺旋桨可用拉力;Tt为飞机所处高度的大气温度;TK为海平面温度;P为无人机所处高度的大气压力;P0为标准大气压;h为高度;N为电机功率。
无人机平飞需用拉力Ta计算如式(14):
Ta=Mg/K
(14)
无人机需用拉力、螺旋桨可用拉力与平飞速度的关系如图4。螺旋桨可用拉力与无人机需用拉力的交点对应于最大平飞速度Vmax,大于设计要求的最大平飞速度150 km/h,驱动电动机与螺旋桨匹配良好,满足动力性能要求。
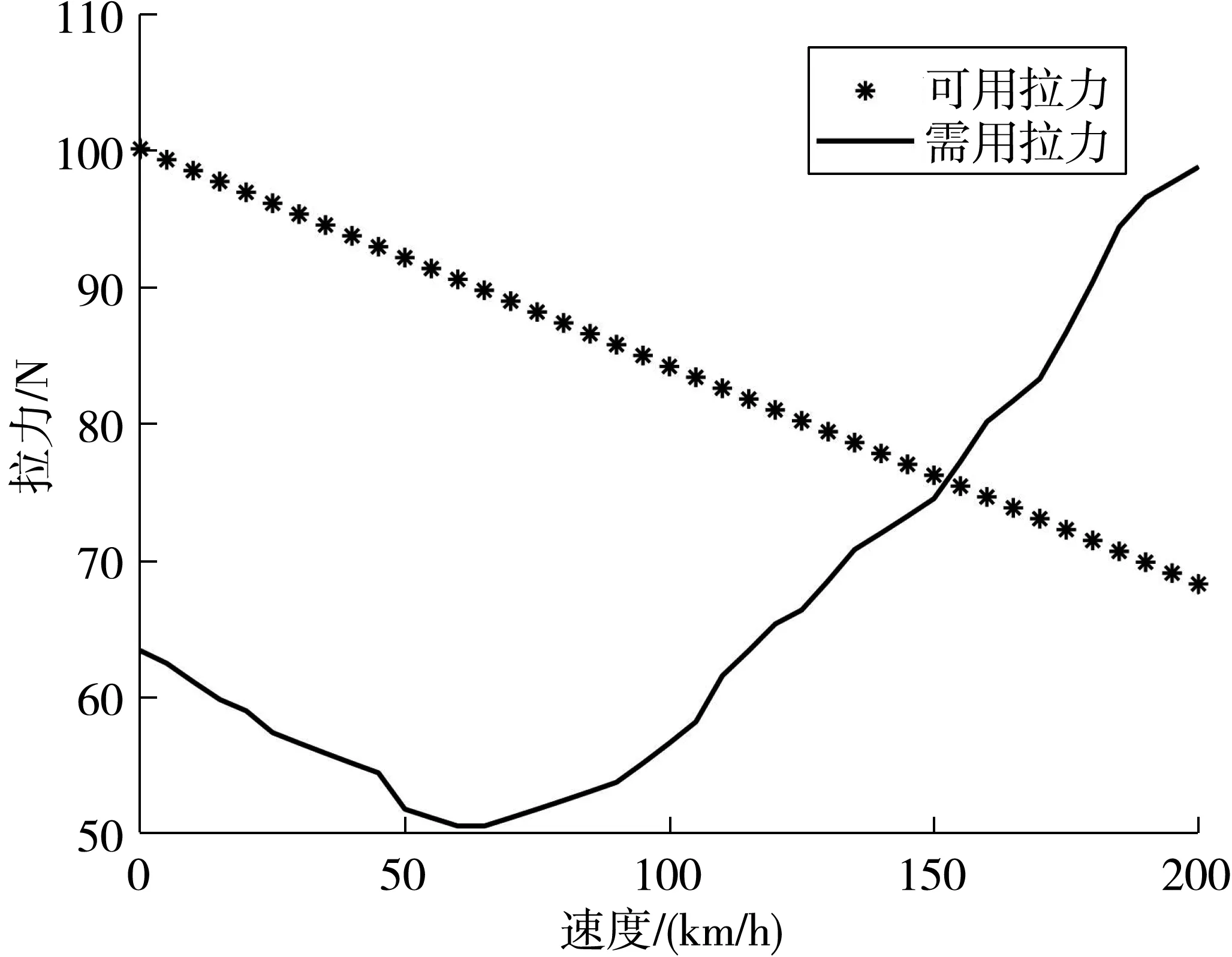
图4 平飞速度与拉力曲线Fig. 4 Horizontal flight speed and tension curve
3 动力系统仿真分析
3.1 动力系统仿真模型
动力系统的子系统主要包含航空发动机、发电机、电机、电池等,它们都具有非线性的特性,因此难以建立精准的数学模型,其理论分析是通过试验获取大量的数据作为仿真基础,以满足工程实际需要,同时尽可能简化系统的控制参数。根据无人机各部件参数,采用插值法,基于MATLAB/Simulink建立其增程式油电混合动力系统模型,如图5。

图5 动力系统仿真模型Fig. 5 Powertrain simulation model
3.2 动力系统控制策略设计
增程式油电混合电推进系统在结构上与串联式相同,其能量管理控制策略即发动机与电池的功率分配,不同的功率分配会导致无人机动力性、经济性以及电池寿命差异很大,需即要制定合理的控制策略来实现两个动力源间的能量流动和模式切换,以达到最佳效果。笔者仿真过程中未涉及发动机出现故障导致的空中熄火重启等系列问题。
基于规则的能量管理控制策略简单、鲁棒性强、易于实现,常见的有恒功率控制和功率跟随控制[13]。采用恒功率控制策略,当电池电量充足时,无人机以纯电动模式飞行,当电池电荷状态(state of charge,SOC)值下降到ISOC,low后,则启动发动机,其输出的功率经发电机一部分传送到驱动电机,多余的储存到电池中,直到SOC值上升到ISOC,high后关闭,再次由电池输出功率到驱动电机。当SOC值处于ISOC,low和ISOC,high区间时,发动机与前一时刻的运行状态一致。
3.3 仿真分析
在MATLAB/Simulink软件中对增程式垂直起降无人机油电混合电推进系统进行建模,根据参数匹配结果,采用恒功率控制策略对模型进行仿真分析,仿真中设置SOC初始值为0.80,设置控制参数ISOC,high=0.60,ISOC,low=0.35,在实际飞行工况数据(需求功率)下进行仿真,以验证第2节参数匹配的结果是否符合实际工况要求。设计的仿真工况如图6,仿真结果如图7、图8。
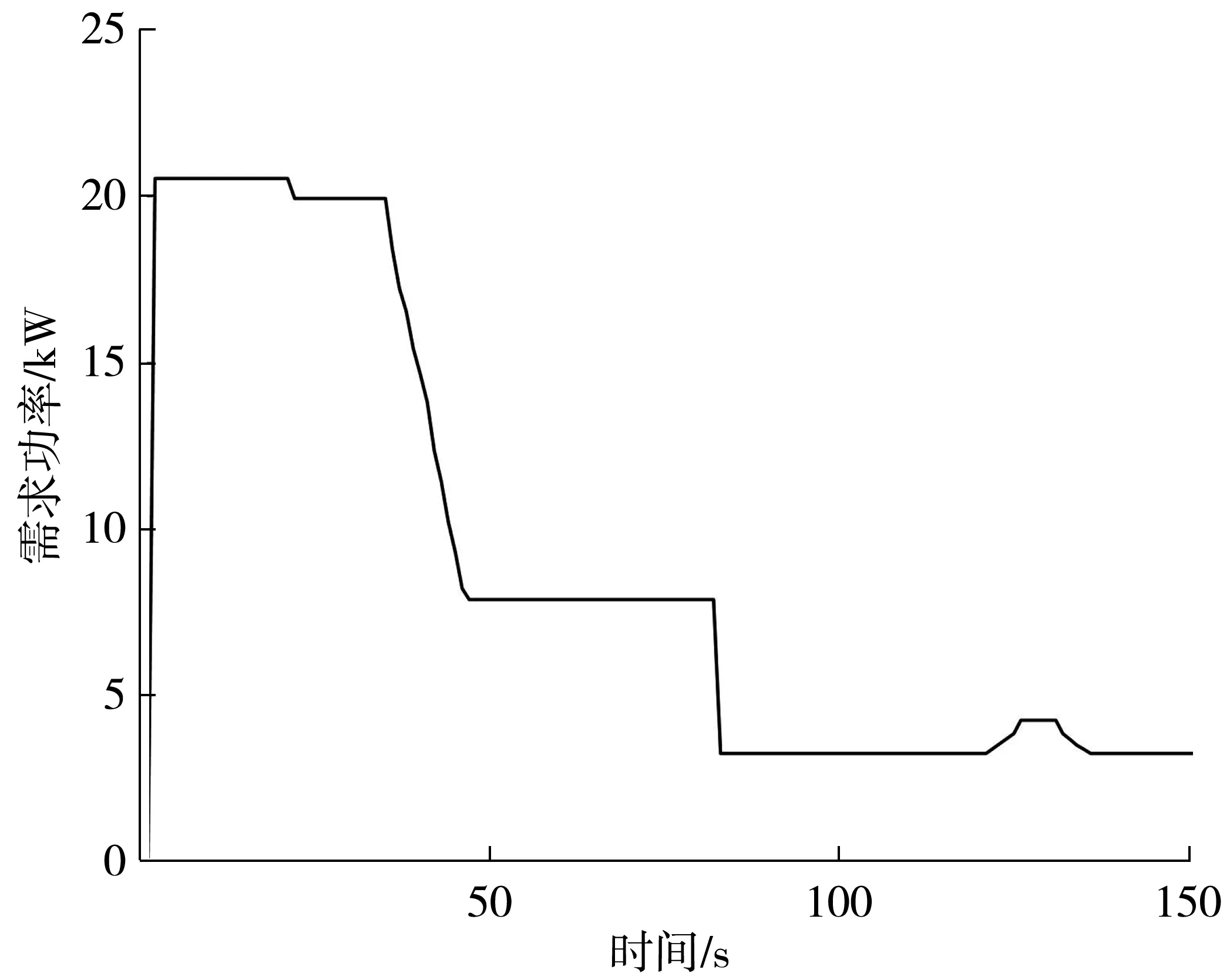
图6 仿真工况Fig. 6 Simulation conditions

图7 SOC随时间变化关系曲线Fig. 7 Variation curve of SOC changing with time

图8 电机输出转速率曲线Fig. 8 Motor output speed rate curve
图7为SOC随时间的变化曲线。在起飞阶段功率需求较大,电池电量充足,此时发动机不工作导致SOC值下降较快,当SOC值达到ISOC,low时发动机开始工作,为电池充电。无人机由四旋翼模态转到固定翼模态结束时,此时发动机仍处于开启状态,而在固定翼爬升和巡航阶段需求功率较小,因此电池一直处于边充边放的状态,SOC值保持在[0.35, 0.45]区间内波动。
图8为电机随时间变化曲线,表5为相应油门点的转速值。起飞阶段,只有旋翼电机提供动力,尾桨电机不工作,旋翼电机转速可达3 000 rpm左右,满足所选电机75%~80%油门时的转速范围。在设定的工况中,在31 s时开始由四旋翼模态转换为固定翼模态,尾桨电机开始运转;45 s时达到转换固定翼最低飞行速度,转换结束,此时四旋翼电机已停止运行,且尾桨电机运行在前述参数匹配所选电机75%~100%油门时的转速范围内,满足工况需求。
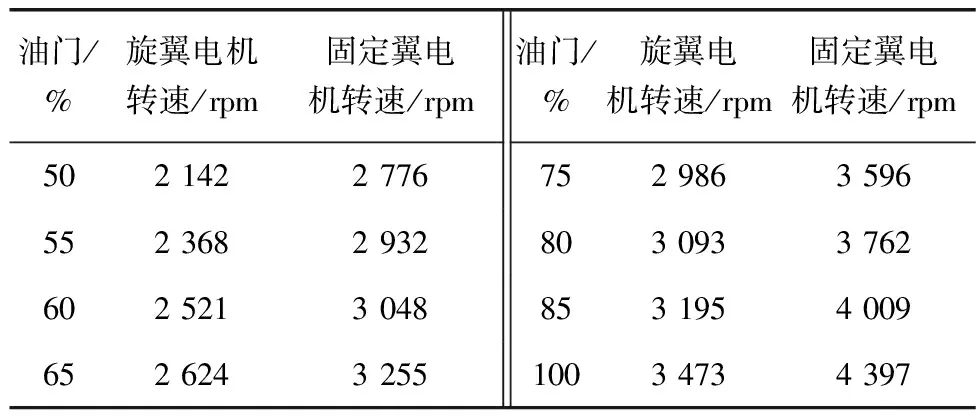
表5 油门与转速
4 结 论
根据垂直起降固定翼无人机的特点,结合飞行动力学理论计算和参数匹配结果,得到以下结论:
1)综合考虑油电混合动力系统不同构型优缺点的基础上,设计了适用于垂直起降固定翼无人机的增程式油电混合动力系统构型方案。
2)根据无人机性能设计需求,对无人机在垂直起降模态和固定翼模态进行功率参数匹配和动力系统部件选型,选型结果匹配良好。
3)为进一步验证混合动力系统匹配和选型的结果,建立了垂直起降固定翼无人机油电混合动力系统仿真模型,并采用恒功率控制策略进行仿真分析。仿真结果表明,动力系统在该能量管理控制策略下能够根据任务剖面的要求合理配置能源系统的功率,满足各阶段的功率需求,为该类型无人机油电混合电推进系统设计提供参考。
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
北京航空航天大学学报(2021年4期)2021-11-24 01:13:00
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
装备制造技术(2020年1期)2020-12-25 05:18:18
空间科学学报(2020年4期)2020-04-22 01:17:20
电子制作(2019年9期)2019-05-30 09:41:48
电子制作(2019年7期)2019-04-25 13:18:24
航空模型(2016年10期)2017-05-09 06:25:59
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09