基于随机森林算法的叉车驾驶员情景意识水平分析
2023-11-13 02:05:58陈伟炯罗雅彬韩伟佳
重庆交通大学学报(自然科学版) 2023年10期
陈伟炯,冯 祥,李 新,罗雅彬,韩伟佳
(1. 上海海事大学 商船学院,上海 201306; 2. 上海海事大学 海洋科学与工程学院,上海 201306;3. 中远海运重工有限公司,上海 200135)
0 引 言
随着船舶制造业快速发展,以叉车为主的场内重物搬运载具呈满荷作业的状态,有别于飞行管制和汽车驾驶,叉车驾驶员需要在复杂环境下连续完成驾驶、堆垛和搬运等任务,安全事故时有发生。根据美国职业安全与健康管理局(OSHA)对全球近20年(2002—2022年)的特种设备事故统计,场内叉车安全事故共计2 375条,其中死亡事故816例,占事故总数的34.36%。我国市场监督总局关于2020年全国特种设备安全状况的通告显示:因使用、管理不当等原因导致叉车安全事故数约占特种设备事故总起数的73.83%[1]。学界在分析叉车事故原因发现:造成场内叉车事故主要涉及人、叉车、现场环境等3个综合要素,且事故主要发生在叉车行驶、装卸作业和叉车维修过程中;场内叉车事故与叉车驾驶员的工作态度、操作技能、应变能力和心情好坏等一系列因素息息相关[2]。从各类事故原因所占比例看,叉车行驶中发生事故占44%,装卸过程中发生事故占23%,叉车检修作业中发生事故占7.9%,据此可得出叉车事故主要与叉车驾驶员有关的结论。
情景意识理论已运用在空中管制、飞行绩效和车辆驾驶等领域,且随着新兴技术出现,生理测量、数据融合和机器学习等方法在研究驾驶员工作绩效和操作水平中效果明显,成为情景意识评估的重要方法[3]。情景意识(situation awareness, SA)由前美国空军首席科学家D.G.JONES等[4]最先提出,即“在一定时间和空间内,对环境各组成要素知觉的理解,及对近期未来状态的预测”。D.B.KABER等[5]将情景意识分为3层水平:第1层次为线索知觉(感知),是情景意识最薄弱的环节;第2层次为理解,是对获得信息进行整合与态势研判;第3层次为预测,即预测未来情景事件的能力,是情景意识的最高层次。情景意识水平测量方法涵盖主、客观两个基本方面,其中全面评估技术(SAGAT)、现状评估技术(SPAM)、眼动追踪技术和生理指标评估均被证明是可以用来测量SA的方法[3]。在驾驶与疲劳检测研究中,以眼动追踪技术为主的生理指标分析最为广泛和有效。HU Xinyun等[6]利用虚拟实验平台对20名驾驶员开展了疲劳检测试验,通过分析被试者眨眼持续时间和扫视持续时间平均速度变化,发现超负荷驾驶会导致驾驶员警惕性降低,证明了眼动特征的不同生理反应与驾驶疲劳存在显著差异关系。G.DI-FLUMERI等[7]将眼动技术与脑电图(EEG)相结合,测试了20名汽车驾驶员在不同交通环境和道路类型下的指标参数,证明了生理指标在汽车驾驶员情景意识水平测量中具有显著效果,揭示了眼动追踪相对于主观测量具备更高的敏感性。汪磊等[8]为探究飞行员的脑力负荷特征,以心率(heart rate, HR)、心率变异性(heart rate variability, HRV)、皮肤电活动(electrodermal activity, EDA)和眼动指标作为因变量,融合了飞行员生理特征指标,分析了不同任务情景下飞行员的脑力负荷特征与飞行经验水平的相关性,为提高飞行安全水平,提高训练效率提供了数据支撑。情景意识研究领域内涵丰富,但国内外关于驾驶员情景意识的研究主要集中在飞行员和汽车驾驶员的分心、疲劳方面,对以叉车为代表的特种设备研究较少,且多数实验以模拟器为主,鲜见实际场景下的作业试验分析。因此,研究叉车驾驶员操纵叉车过程中的情景意识变化,一方面需要关注叉车驾驶员生理指标因素与情景意识水平之间的相关性,另一方面要重视情景意识对安全驾驶的本质作用,尤其是在现场环境下叉车驾驶员情景意识变化对安全驾驶的作用。
综上,笔者以提高叉车驾驶员安全水平作为研究目标,基于主成分分析法和精确预测眼动指标特征重要度的随机森林算法,分析了叉车驾驶员眼动指标与SA水平关系,最终确定了眼动指标中最能反映驾驶员SA水平的注视总持续时间比(fixation duration proportion, FDP)、注视次数比(fixation count proportion, FCP)和平均注视持续时间(average fixation duration, AFD)作为研究指标;基于文献[9-11],融合皮肤电导水平(skin conductivity level, SCL)和HR验证了叉车驾驶员生理指标特征与SA水平的关联性,探讨了复杂现场环境下不同叉车驾驶员SA水平所表现的生理特性,并根据研究结果为客观评估驾驶员技能水平提供建议,达到保障安全驾驶的目的。
1 试 验
1.1 被试者
笔者选取14名男性叉车驾驶员(平均年龄M=42.28岁,标准差(SD)为2.5)参与试验,正常视力或矫正视力1.0及以上,所有被试者均持有特种设备操作证书,实际驾龄至少3年。被试者均无肌肉方面遗传问题,无色盲色弱,视力正常,听力正常。
1.2 试验设备
试验设备主要包括内燃叉车和生理测量设备两类。内燃叉车为合力K系列3 t柴油平衡重式CPC30型叉车。该型号叉车采用宽视野门架,视野宽阔,门架槽钢截面加大,整体结构坚固可靠。起升系统配备防爆安全阀,内部框架筋板结构,强度高质量可靠。整体性能优越,符合实验条件。该叉车具体参数如表1。
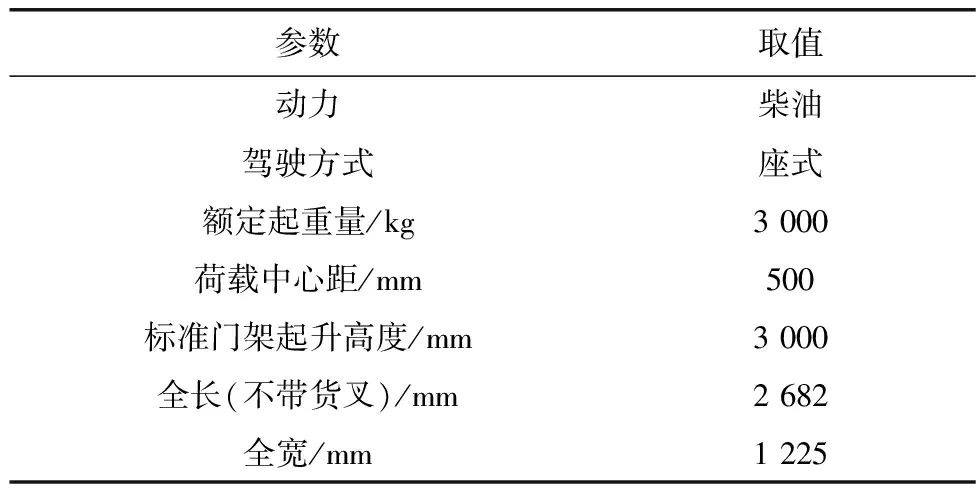
表1 内燃叉车参数
试验采用眼动追踪指标与皮肤电导水平指标融合的研究方法,选用带有实时观察功能的Tobii-Glasses2可穿戴眼动仪,搭配Ergo-LAB表面肌电测量系统,综合测量叉车驾驶员的眼动、皮肤肌电数据。眼动仪的采样频率为50 Hz,重量超轻,可获得自然的视觉行为数据;Ergo-LAB配置高精度传感器,可采集肌电、心电、脑电等多种生理电信号,经Ergo-LAB人机环境同步云平台,实现对人员姿态、疲劳、情绪唤醒及认知负荷等指标的实时评估,最终完成人员状态识别与监测。
1.3 试验设计
1.3.1 场景设计
本次试验在某海工企业的国家标准考场进行,通过开展“路考”、“金字塔”、“堆垛”3项叉车代表性技能考试项目,分3个综合场景对试验人员的生理特征指标进行提取。叉车驾驶员需驾驶车辆行驶固定路线,根据场景任务完成相应的行为操作,并在试验前后填写情景意识主观量表(situation awareness rating technique, SART)。场景设置如图1。
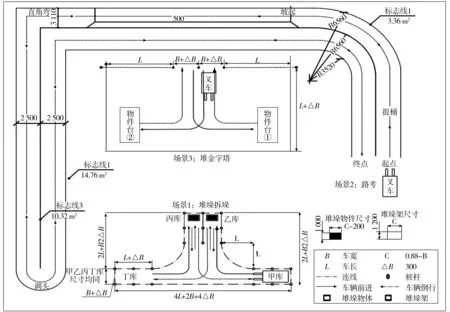
图1 叉车试验场景示意Fig. 1 Forklift test scene
1.3.2 变量设计
试验自变量为叉车驾驶员SA水平,因变量为眼动、皮肤肌电生理指标。根据问卷得分和试验得分结果,划分成两组不同SA水平的叉车驾驶员试验组。其中,问卷采用国际流行的SART,试验前后叉车驾驶员填写问卷,并对驾驶员SART得分进行排序。试验得分包括绩效水平、路考得分和专家打分,依据定性、定量结合原则,将收集到的SART与试验得分综合考量,运用二分法对主、客观得分计算,最终确定叉车驾驶员SA水平。考虑到数据误差和试验故障的可能性,笔者对14名被试者的最终得分进行两极化分析,引入经济学观点“马太效应”,将被试者情景意识水平进行量化,筛选出特征明显的高低对比组[12]。其中:高SA水平组被试5人,低SA水平组被试6人。
采用随机森林算法对影响SART主观量表分数的眼动指标特征重要度进行排序。试验采集的眼动指标包括:FDP、FCP、平均眼动追踪转移比(average track distract, ATD)、眼动追踪转移比(track distract, TD)、注视持续时间(fixation duration, FD)、AFD、总访问时间(total visit time, TVT);采集皮肤肌电指标包括:SCL、HR。其中:FDP、FCP和AFD作为试验首要因变量,SCL、HR作为试验次要因变量。
1.4 试验流程
试验包括设备培训、驾驶试验、数据回访这3个阶段。设备培训阶段:被试者应阅读试验计划书,熟悉试验场景及任务,并在研究人员指导下佩戴眼动仪、皮肤电活动传感器;熟悉实验设备后,被试者进入驾驶试验阶段,操作前完成SART填写,研究人员对实际测量的生理指标数据进行储存和备份;试验完成后,附加数据回访阶段,根据数据显示类型,对被试者开展场景回忆,保证试验过程的完整性。
1.5 试验方法
使用SPSS24软件对生理指标数据进行分析。基于相关性分析、独立样本t检验和主成分分析等方法完成数据预处理。借助python3.8构建随机森林(random forest, RF)回归模型,采用袋装法抽取眼动指标训练,通过调整生成树数量和树的最大深度参数提高模型训练精度。
2 结 果
2.1 数据预处理
在试验过程中,有1名被试者的眼动指标数据在采集时因叉车中途熄火,无法精准划分而数据不予采纳;另有2名被试者未按照指定顺序进行场景任务,故在补做后其数据作为备选样本。经筛选误差和删除异常数据后,笔者选择11名被试者的生理指标作为初始数据。
2.2 眼动指标结果
由于各指标之间存在不同程度的相关性,采用主成分分析法对采集到的指标进行数据降维,以选取具有代表性的评价指标,消除变量之间的相关性。笔者将随机森林算法得出的眼动指标特征重要度结果与主成分分析法结果进行对比,综合筛选出重要特征作为研究变量。
2.2.1 主成分分析法
考虑到不同眼动指标之间存在计量单位差异,采用SPSS软件对眼动数据进行标准化处理。将标准化后的数据作为主成分分析实验数据,其中,KMO值为0.765,p值为0.000。
表2为眼动指标主成分特征值及方差贡献率,依据特征值大于1原则,提取2个主成分F1、F2,即第1、2主成分的特征值分别为4.021、1.087,其累计贡献率分别为57.44%、72.96%,能较好反映眼动指标构成的原始信息。表3为主因子载荷矩阵。表3中:第1主成分中起主要作用的眼动指标为FDP、FCP,载荷绝对值分别为0.972和0.968;AFD指标对第2主成分起主导作用,载荷值为0.748。将标准化后的眼动指标FDP、FCP、ATD、TD、FD、AFD、TVT分别记为X1~X7。

表2 主成分特征值及方差贡献率
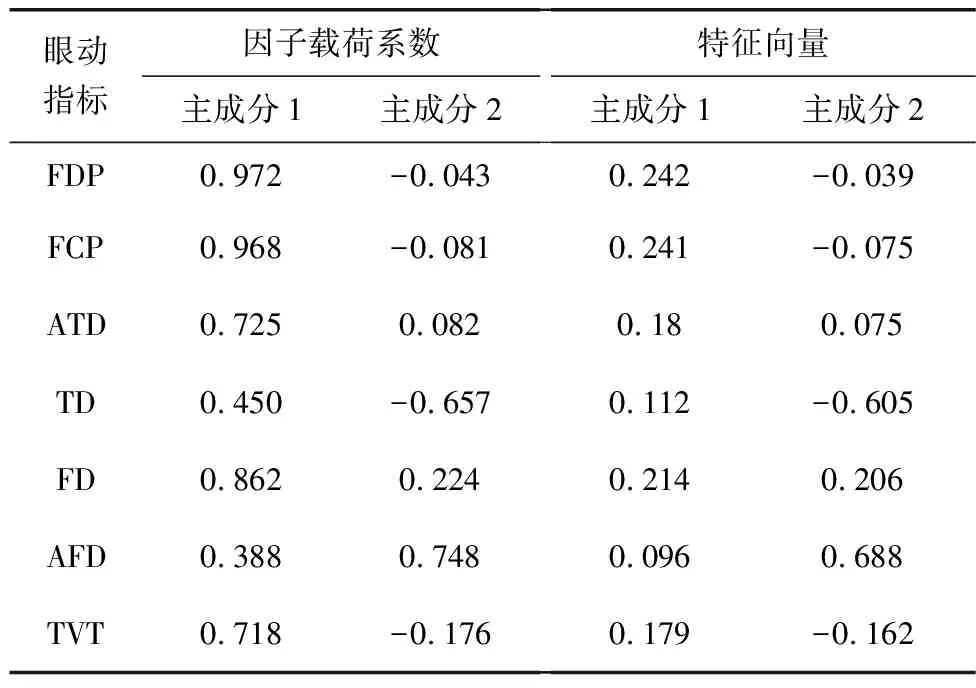
表3 主因子载荷矩阵
由表3可得出主成分得分,如式(1)、式(2):
F1=0.242X1+0.241X2+0.18X3+0.112X4+0.214X5+ 0.096X6+ 0.179X7
(1)
F2=-0.039X1-0.075X2+0.075X3-0.605X4+0.206X5+ 0.688X6- 0.162X7
(2)
依据第1、2主成分的方差贡献率为权重,可得叉车驾驶员眼动指标评价模型,如式(3):
F=0.574F1+ 0.155F2
(3)
将实际测量的眼动指标数据代入式(3),计算F得分并与SART得分对比。计算结果表明:主成分分析法计算结果与SART得分情况一致,符合叉车驾驶员情景意识水平分组规律,对比情况如表4。

表4 不同叉车驾驶员综合得分及排名
综上,主成分结果与实际试验过程中叉车驾驶员表现得分趋于一致,说明了依据眼动指标测量叉车驾驶员情景意识水平的可行性。主成分1中FDP、FCP指标及主成分2中AFD指标对综合得分结果影响较大,可作为评价叉车驾驶情景意识水平的重要眼动指标。
2.2.2 随机森林算法
随机森林是以分类树为支撑的机器学习算法,具有回归、分类、预测等功能,该模型能广泛应用于参数优化、变量排序及分析解释方面[13]。在眼动指标筛选过程中,依照分组结果将采集的眼动指标设置为训练自变量,将SA得分设置为模型训练因变量,选取70%的眼动数据作为训练样本,30%的数据作为测试样本。图2为转化成百分制后的模型训练数据样本分布。
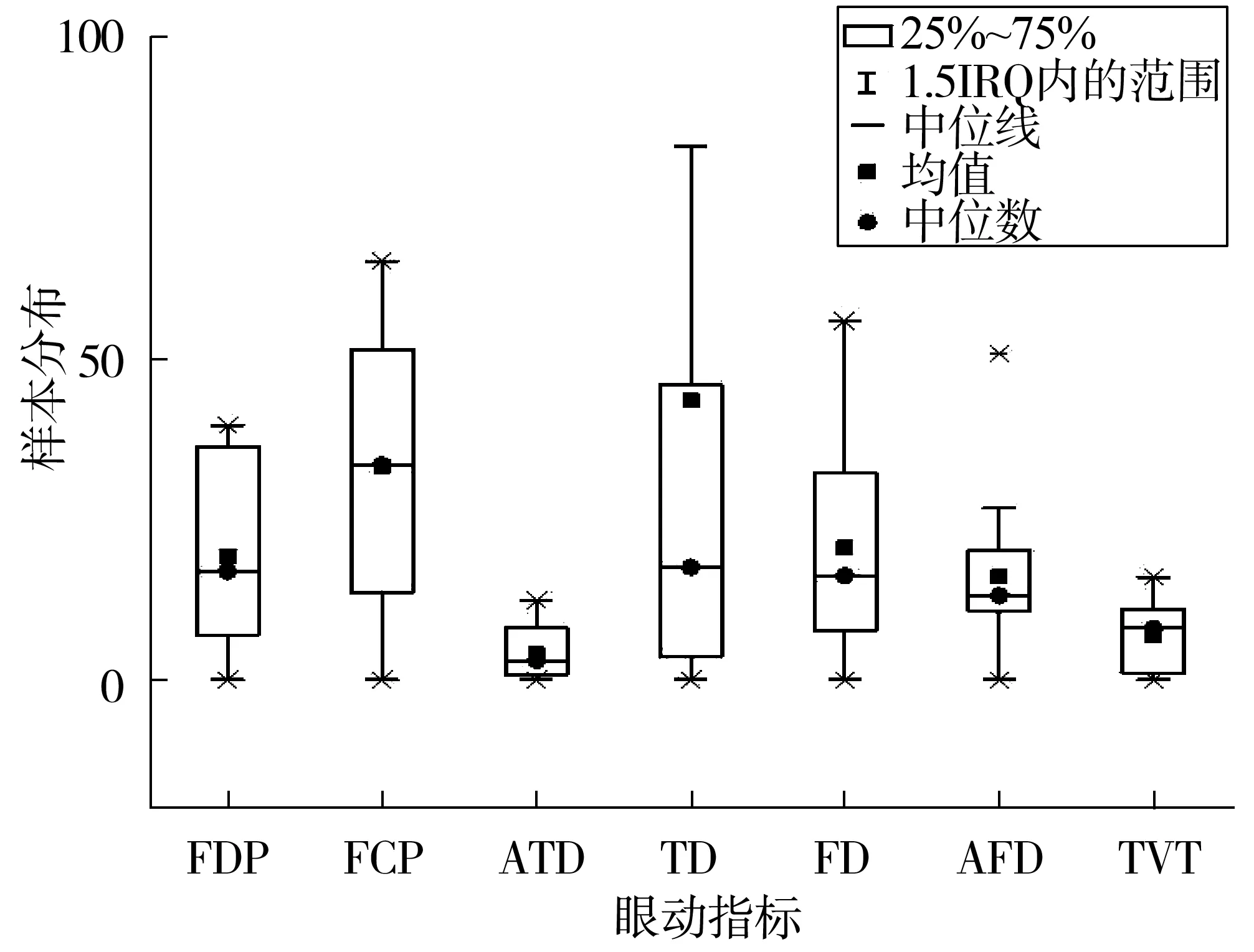
图2 眼动指标训练和验证数据库样本分布Fig. 2 Eye movement indicators training and verification database sample distribution
确定眼动指标的数据集和测试集后,采用袋装法随机抽取眼动指标进行模型训练。袋装法工作原理为:从样本集中多次放回采样大小为N的K个训练集,对每个训练集建立回归模型;假设样本容量为N,则每次放回抽样的样本不被抽中概率为(1-1/N)N,未被选中样本称为袋外数据(out of bag, OOB);由于训练样本集元素各不相同,因此保证了回归树模型的差异性。图3为随机森林袋装法的抽样流程。
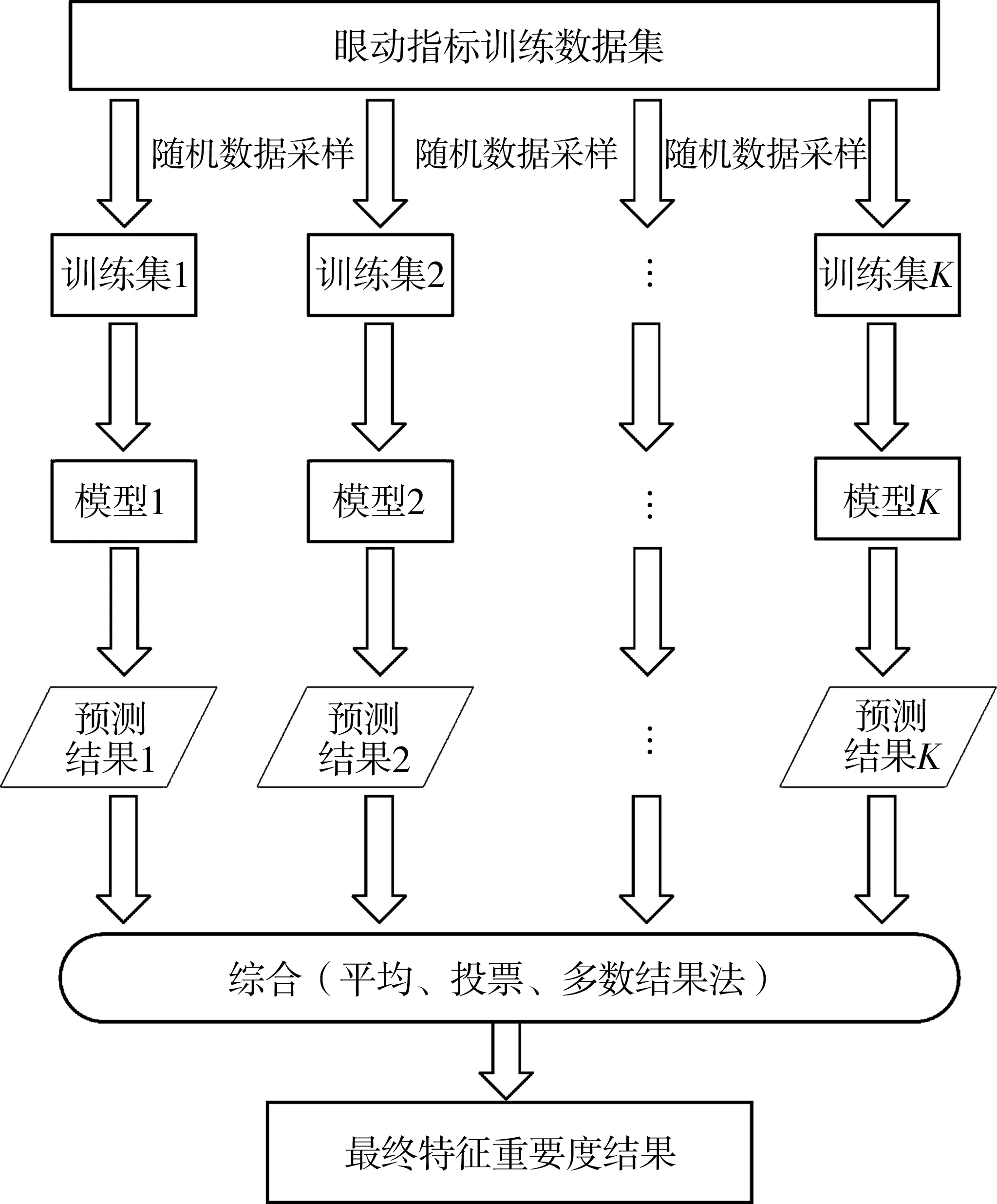
图3 随机森林袋装法抽样流程Fig. 3 Random forest bagging sampling process
在分析眼动指标与SA得分关联性的过程中,基于OOB误差可得到各眼动指标变量重要性。假设xj为输入变量,则在第k棵树上的重要性Ik为随机置换变量前后袋外数据估测误差的差值,如式(4):
(4)
变量xj在整个随机森林中的重要性得分如式(5):
(5)
随机森林回归模型可以根据变量重要性程度进行排序,同时基于gini节点分裂评价准则和袋装法误差完成变量重要性的评分统计,实现输入对输出的可视化功能[14]。图4为随机森林创建多个决策树模型实现的眼动指标特征重要度预测。由于不同方案的参数设定会影响模型泛化误差和运行时间,通过调整生成树的数量n和树的最大深度m来提高模型训练精度,如图5。图5中:当n=189,m=9时,模型均方误差较小,模型精度(accuracy, ACC)为0.82,分类性能较好。
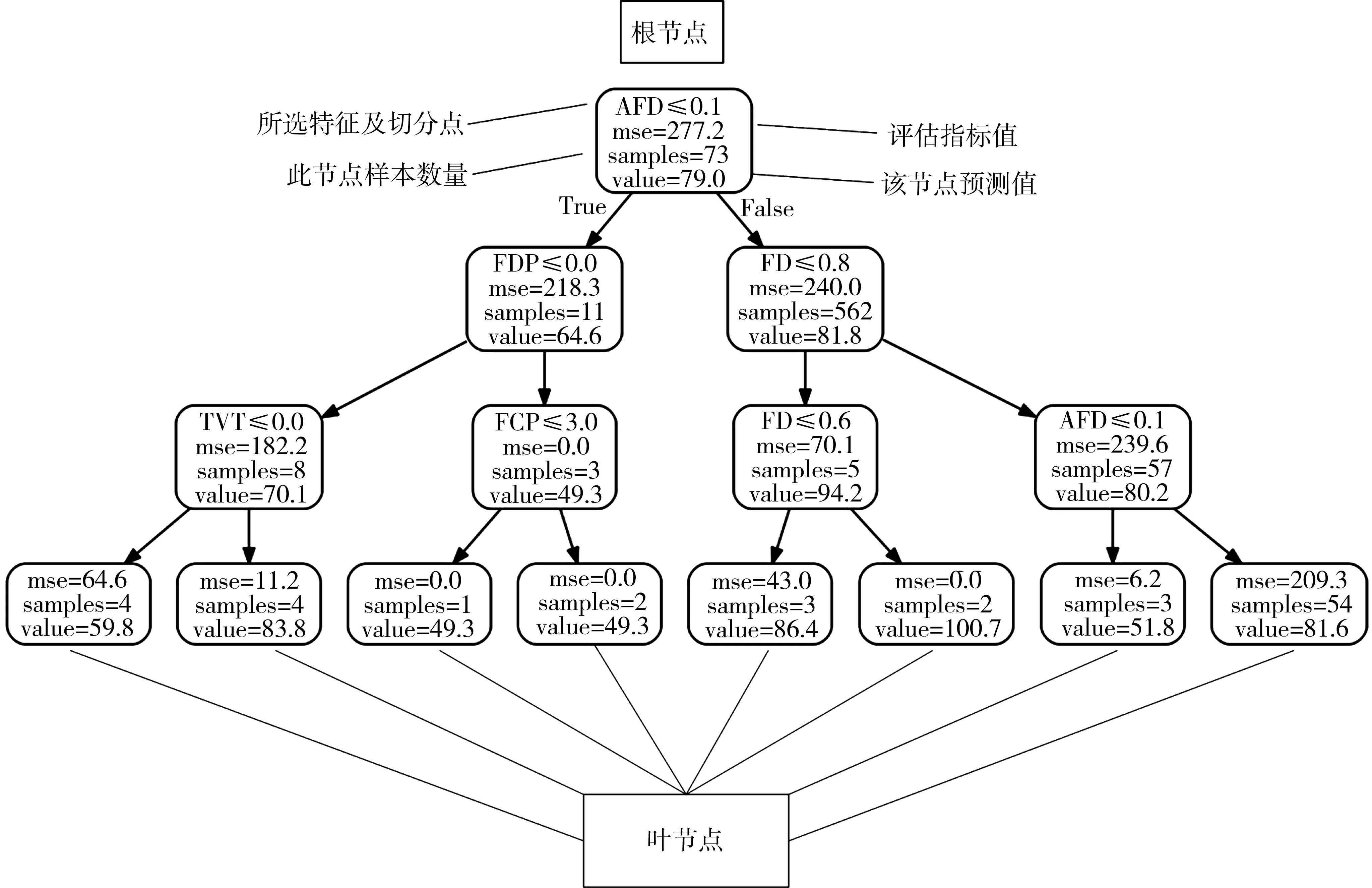
图4 眼动指标特征重要度预测决策树Fig.4 Decision tree for predicting the importance of eye movement indicator feature
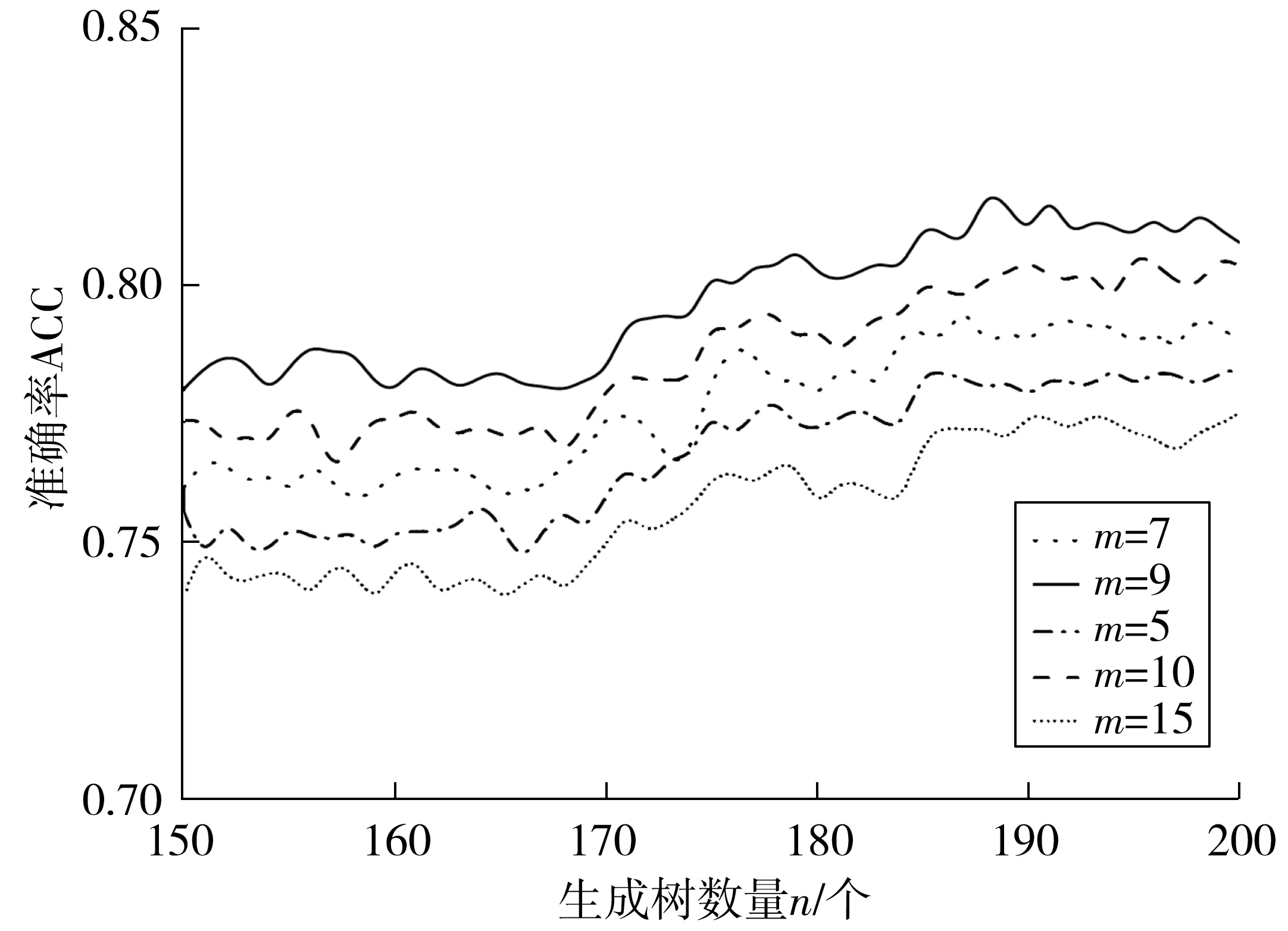
图5 不同参数下模型误差情况Fig. 5 Model error under different parameters
考虑到预测模型的随机性,取模型训练的20次结果来计算平均值,图6反映了随机森林模型训练的眼动指标特征重要度。根据预测结果,选取特征重要度排名前3的眼动指标(FDP、FCP和AFD)作为测量叉车驾驶员情景意识水平的影响因素。
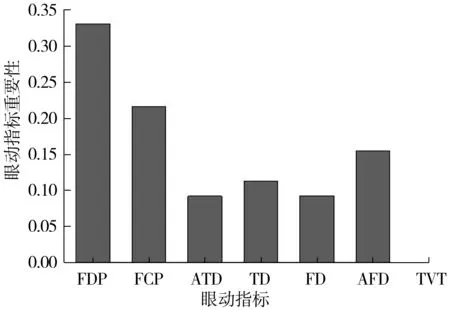
图6 随机森林预测的眼动指标特征重要度Fig. 6 Important degree of eye movement indicator feature of random forest prediction
文献[15, 16]指出:眼睛注视时间、凝视分散时间都可对风险情况进行预测,注视次数、注视方向的高频率改变有利于更好地识别车辆驾驶过程中的突发事故。根据叉车驾驶员眼动指标的主成分分析结果及随机森林的特征重要度结果,提取FDP、FCP和AFD作为研究叉车驾驶员情景意识水平的对比指标。
图7反映叉车驾驶员眼动指标的SA水平对比组情况,其中图7(a)为叉车驾驶员眼动指标经随机森林算法预测后的特征重要度结果,图7(b)~图7(c)分别为不同SA水平下3个场景的FDP、FCP和AFD指标变化。高SA水平组叉车驾驶员的FDP、FCP、AFD数值均高于低SA水平组。

图7 眼动指标不同SA水平对比Fig. 7 Comparison of eye movement indicators with different SA levels
2.3 EDA与HRV指标结果
基于随机森林算法的分析过程,选取皮肤电活动EDA指标中特征重要度最高的SCL值作为评价叉车驾驶员SA水平的对比指标;选取影响心率变异性HRV指标权重最大的HR值来验证不同SA水平的差异性。SCL是跨越皮肤两点间的皮肤电导的绝对值,其基础水平存在个体差异,并与个性特征相关。一般而言,SCL基础水平越高者,越倾向于内向、紧张、焦虑不安、情绪不稳定、反应过分敏感;而基础水平越低者,越倾向于开朗、外向,心态比较平衡、自信,心理适应较好;SCL值越高,被试者脑力负荷压力越大,易引发疲劳特性,识别危险能力下降[17]。HRV是指逐次心跳周期差异的变化情况,在影响叉车驾驶员SA水平的生理指标中,HR作为反映HRV的重要生理指标,被证明是影响SA水平的有效指标[17]。当叉车驾驶员处于工作状态,HR值越高,表明身体处于来自于运动、心理事件或其他内部或外部压力源的压力越大,且过高的心率变化会引起驾驶员操作失误率增加,不利于驾驶过程中的安全操作。图8为3个试验场景下不同SA水平的SCL、HR值,其中高SA水平组的指标均值低于低SA水平组。
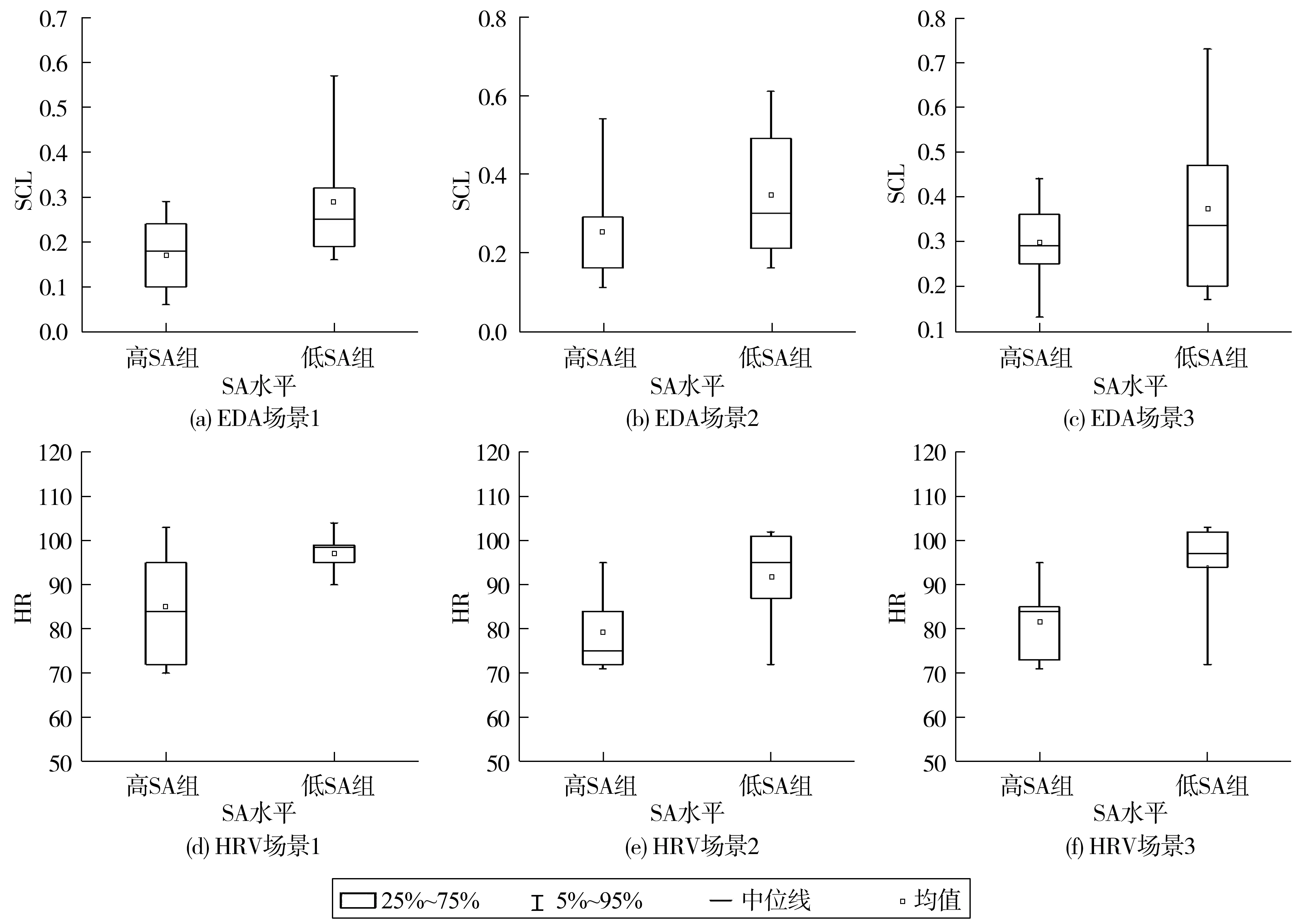
图8 多场景下不同SA水平EDA、HRV箱线图Fig. 8 EDA and HRV box plots with different SA levels in multiple scenarios
3 分 析
选取FDP、FCP、AFD这3项眼动指标来分析叉车驾驶员注意力分配情况,并结合HRV、EDA指标中的HR、SCL值对被试驾驶员疲劳压力状态进一步探讨。对比国内外生理指标测量情景意识的方法研究,笔者采用主成分分析法和随机森林算法结合的方法,在研究眼动指标与叉车驾驶员情景意识水平基础上,通过分析皮电、心率等指标验证情景意识水平分组的合理性,更加全面的反映了不同情景意识水平叉车驾驶员进行驾驶作业时的差异性。
3.1 眼动指标与SA关系
高SA水平组的叉车驾驶员兴趣区(area of interest, AOI)的FDP、FCP和AFD均高于低SA水平组,而总注视时间越长,表明被试者对该区域的关注程度越高,相应的信息处理能力越强[18]。相对于低SA水平组,高SA水平组呈现出对任务处理的关注度更高,对驾驶作业兴趣区注视次数更频繁,对危险情况发生感知更敏感的特性。同时,叉车驾驶员AOI的AFD与驾驶员情绪状态存在相关性,良好情绪下驾驶员注视到AOI的次数更多且注视到的区域更多;在AOI注视下时间越长,注视点个数越多[19]。
笔者以SA得分作为驾驶员SA水平高低的分组依据,采用数理统计方法和机器学习相结合的思路开展眼动指标与SA水平的相关性研究。研究结果表明:眼动指标能较好地体现驾驶员SA水平,高SA水平组驾驶员在分辨危险、安全驾驶能力方面要强于低SA水平组,在实际驾驶过程中更容易保持安全驾驶状态,安全水平更高。
3.2 SCL与SA关系
试验中采用SCL和HR作为叉车驾驶员SA生理测量指标。研究结果显示:高SA水平组驾驶员的SCL和HR均低于低SA水平组。同时,被试者的SCL值越高,其情绪越容易呈现出焦躁、疲劳和紧张等状态,相应驾驶行为发生危险的概率越高。在叉车驾驶过程中,高SA水平组驾驶员表现出更为积极的情绪特征,对试验场景任务完成情况更好,呈现出高水平的安全驾驶能力,且工作过程中极少出现失误情况;而低SA水平组完成任务时间较长且容易发生失误。
在SA影响生理唤醒方面,HR能敏感地表现出任务难度,且伴随任务难度增加有增长趋势。笔者选择HR作为评价SA水平的重要指标,一方面验证了眼动指标与SA水平的显著性差异,达到不同类型生理指标评价情景意识水平效果;另一方面补充了HR反映SA水平的可行性,旨在打破现有研究中关于生理指标选取仅关注眼动指标的局限性。随着叉车试验中场景切换,不同SA水平的叉车驾驶员表现出差异显著的生理变化,高SA水平组的HR值在3个试验场景下始终小于低SA水平组。叉车驾驶员SA水平越高,面对复杂任务和危险情况时能保持良好的心理状态和驾驶行为,问题处理能力越强,安全驾驶的水平越高。被试人员的生理指标可较好体现出自身压力和工作状态,不同SA水平对安全行为发生及危险状况的感知存在差异,HR差异性证明了高SA水平有助于提高叉车驾驶员对危险行为感知,有利于为驾驶员开展技能培训提供建议和帮助。
4 结 论
1)叉车驾驶员SA水平与眼动指标FDP、FCP、AFD存在显著相关性,具体表现为高SA水平驾驶员的FDP、FCP、AFD总体高于低SA水平驾驶员,即高SA水平驾驶员更容易对任务集中注意,有利于安全驾驶、高效完成工作任务。
2)SCL和HR与叉车驾驶员SA水平呈负相关关系,即高SA水平驾驶员的SCL和HR均值较低,在试验过程中更偏向于舒适、自信的情绪状态,表现为高SA水平叉车驾驶员任务完成率高、试验时间短且安全稳定等特点。
3)基于随机森林算法对眼动指标特征重要度进行排序,替代了原有的主观选取指标机制,并融合SCL,构建了多指标影响因素评价体系,增强了叉车驾考培训中技能评价的客观性。
猜你喜欢
中国储运(2022年6期)2022-06-18 10:29:00
汽车实用技术(2022年7期)2022-04-20 11:44:42
载人航天(2021年5期)2021-11-20 06:04:32
中国特种设备安全(2021年12期)2021-04-26 14:37:06
共产党员(辽宁)(2019年7期)2019-11-18 10:25:03
共产党员·上(2019年4期)2019-04-26 12:31:32
环球时报(2017-08-18)2017-08-18 07:46:39
广州大学学报(自然科学版)(2016年2期)2017-01-15 13:43:02
中国储运(2016年8期)2016-09-02 06:22:04
奥秘(2016年3期)2016-03-23 21:58:57