
混合动力汽车传动系统扭转振动自适应抑制方法
2023-11-11 09:35杜松
齐齐哈尔大学学报(自然科学版) 2023年6期
杜松
混合动力汽车传动系统扭转振动自适应抑制方法
杜松
(安徽交通职业技术学院,合肥 230051)
为了提高混合动力汽车舒适性和安全性,提出混合动力汽车传动系统扭转振动自适应抑制方法。依据广义牛顿第二定律扭矩平衡原理,建立传动系统动力学方程和状态空间方程;离散化处理状态空间方程,利用长短期记忆网络,建立传动系统状态变量预测模型;引入理想延迟值时滞补偿离散状态空间方程,得到电机转速;以最小电机-车轮转速差、最小电机动作变化量为目标函数,建立扭转振动自适应控制模型;通过天牛须算法求解模型,实现扭转振动自适应抑制。实验结果表明,该方法可有效降低电机-车轮转速差,实现扭转振动自适应抑制;不同工况下,该方法抑制后电机-车轮转速差较小,具备较优的自适应抑制效果。
混合动力汽车;传动系统;扭转振动;自适应抑制;神经网络;天牛须算法
汽车尾气对环境的影响越来越严重,各大汽车生产厂家均采用不同技术,生产对环境影响较小的混合动力汽车[1]。混合动力汽车传动系统结构,以及扭转振动抑制方法,和传统燃油汽车的结构与抑制方法存在较大的差距。汽车扭转振动直接影响其舒适性与安全性[2-4],为此,需要针对混合动力汽车传动系统,研究其扭转振动抑制方法。陈星等[5]通过状态空间法,构造混合动力汽车传动系统动力学方程,利用前馈与反馈控制器,结合动力学方程,设计扭转振动抑制方法。该方法可降低传动系统的80%~90%的扭转振动,具备较优的扭转振动抑制效果。张伟等[6]依据混合动力汽车传动系统运动特性,构造动力学模型,分析扭转振动特性,依据分析结果设计扭转振动主动抑制方法。该方法可有效抑制传动系统扭转振动,可为提升混合动力汽车系统使用性能提供参考。但这两种方法需要调节的参数较多,提升振动抑制的繁琐性,导致传动系统扭转振动抑制的鲁棒性较差,仅适用于正常行驶工况。为提升扭转振动抑制的鲁棒性与适用性,研究混合动力汽车传动系统扭转振动自适应抑制方法。依据预测模型控制算法,实时预测传动系统的状态量,并及时调整自适应抑制策略,扩展自适应抑制方法的使用范围,提升混合动力汽车行驶的舒适性与安全性。
1 传动系统扭转振动自适应抑制
1.1 混合动力汽车传动系统结构分析
混合动力汽车传动系统相对于传统燃油车的主要区别在于增加了电机和电池组件,以实现能量回收、电动驱动和发动机辅助驱动等功能。其中,混合动力汽车通常采用永磁同步电机作为主要电动驱动装置,其特点是高效、轻便、可靠,并且在低速区间具有很好的输出扭矩;电池组件主要由锂离子电池构成,其优点是高能量密度、长寿命、快速充电和放电等。总体来说,混合动力汽车传动系统的主要特点是增加了电动驱动和能量回收功能,以提高燃油经济性和环保性能。混合动力汽车传动系统结构如图1所示。
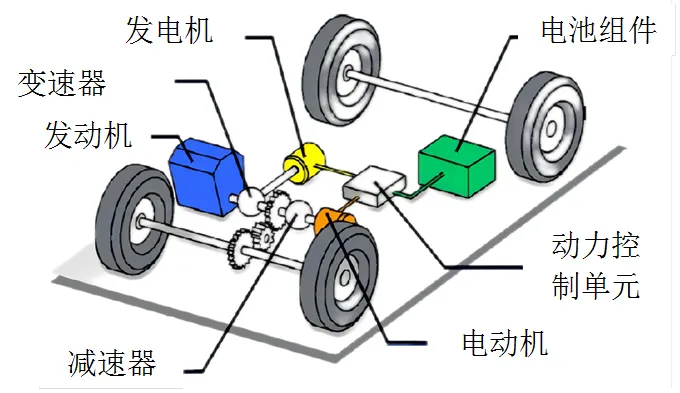
图1 混合动力汽车传动系统结构
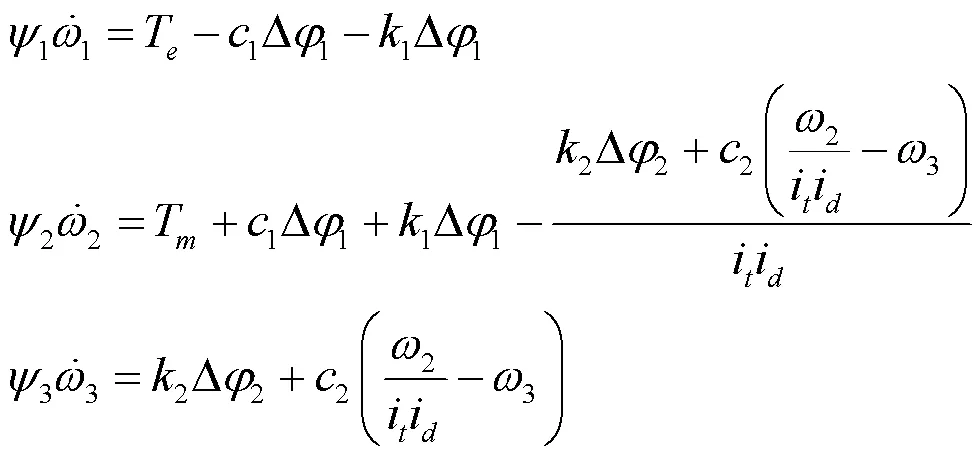
1.2 混合动力汽车传动系统动力学方程
根据混合动力汽车传动系统结构分析结果可知,传动系统扭转振动主要受到发动机、电机、变速器、减速器等部件的影响,为此,按照广义牛顿第二定律扭矩平衡原理,构造混合动力汽车传动系统的动力学方程
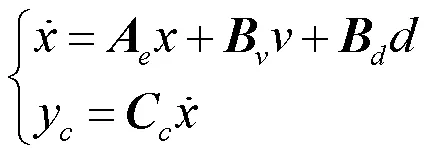
1.3 扭转振动自适应抑制的实现
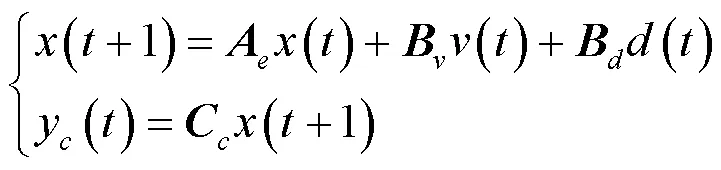
因为扭转振动自适应抑制方法无法对连续的状态方程进行振动自适应抑制,所以利用近似离散化方法,对连续状态方程展开离散化处理,得到离散化的状态方程
在混合动力汽车传动系统扭转振动幅度较大情况下,传动系统的前后转速差便较大。扭转振动自适应抑制的核心为在发动机工作激发震荡情况下,通过电机快速响应的特性,对扭矩进行补偿,降低电机与车轮的转速差,实现扭转振动自适应抑制。
1.3.1 混合动力汽车传动系统状态变量预测模型建立


(2)输入状态更新
(3)更新网络状态

(4)输出传动系统状态变量预测结果
1.3.2 混合动力汽车传动系统状态方程的时滞补偿




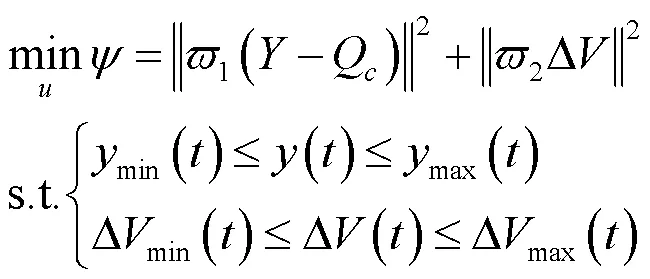
1.3.3 传动系统扭转振动自适应控制模型

传动系统扭转振动自适应控制的目标函数,即自适应控制模型为
1.3.4 传动系统扭转振动自适应控制模型求解
利用天牛须算法,求解传动系统扭转振动自适应控制模型,得到最小电机-车轮转速差与最小电机动作变化量对应的控制量,实现混合动力汽车传动系统扭转振动自适应抑制。
利用天牛须算法求解自适应控制模型的具体步骤为


2 实验分析
以某汽车生产公司研制的混合动力汽车为实验对象,利用本文方法对该混合动力汽车传动系统扭转振动进行自适应抑制,验证本文方法自适应抑制的可行性。该混合动力汽车传动系统中电机额定功率是20kW,峰值功率是45kW,最大转速是7500r/min,传动系统的主要参数如表1所示。
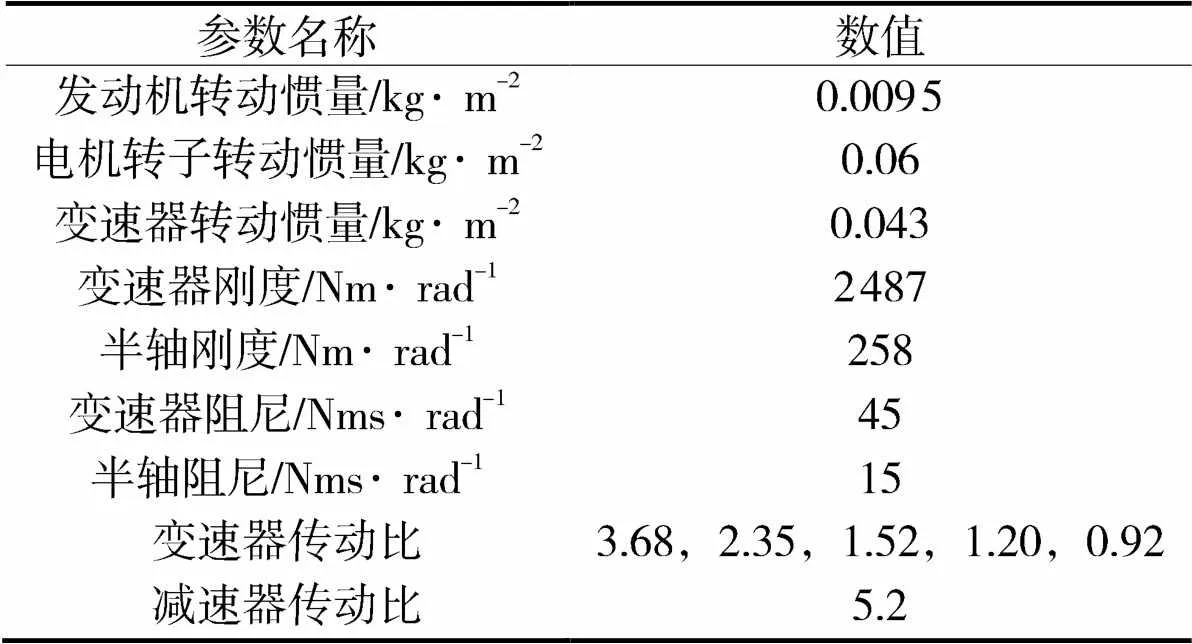
表1 传动系统主要参数
本文方法自适应抑制传动系统扭转振动过程中共设置3种工况,分别是发动机加减速工况、起动工况、高速工况。其中,起动工况为发动机运行至30s时,降低转速至800r/min,并展开怠速调速;高速工况指令发动机转速迅速升至1300r/min,运行一段时间后,再将转速升至2000r/min。
以发动机加减速工况为例,该工况设置发动机运行至10s时,加速至1500r/min,稳定运行20s后,降速至1000r/min,本文方法的自适应抑制结果如图2所示。

图2 本文方法的自适应抑制结果
根据图2(a)可知,在发动机加减速工况下,经过本文方法自适应抑制后,该混合动力汽车传动系统的扭转角变化曲线非常平滑,且无明显的波动现象;未经本文方法自适应抑制前,扭转角的波动幅度较大。根据图2(b)可知,当发动机加减速变化情况下,经过本文方法自适应抑制后,发动机转速的变化曲线非常平稳,并无明显的振动情况;未经本文方法自适应抑制前,发动机转速变化曲线的振动现象严重。实验证明,本文方法可有效自适应抑制传动系统扭转振动,经过本文方法自适应抑制后,扭转角与发动机转速的变化曲线,均无明显的振动现象,说明本文方法具备较优的扭转振动自适应抑制效果。

图3 不同工况下电机-车轮转速差变化情况
分析本文方法在不同工况下,电机-车轮转速差的变化情况,当转速差低于5r/min时,说明扭转振动自适应抑制精度较高,分析结果如图3所示。
根据图3可知,发动机加减速工况,经过本文方法自适应抑制后,最大电机-车轮转速差在3r/min左右;起动工况,最大电机-车轮转速差在2.5r/min左右;高速工况,最大电机-车轮转速差在4r/min左右。不同工况下,经过本文方法自适应抑制后,电机-车轮转速差均未超过5r/min,说明本文方法的扭转振动自适应抑制精度较高。
通过瀑布图俯视形式进一步分析本文方法的自适应抑制效果,以高速工况为例,分析结果如图4所示。
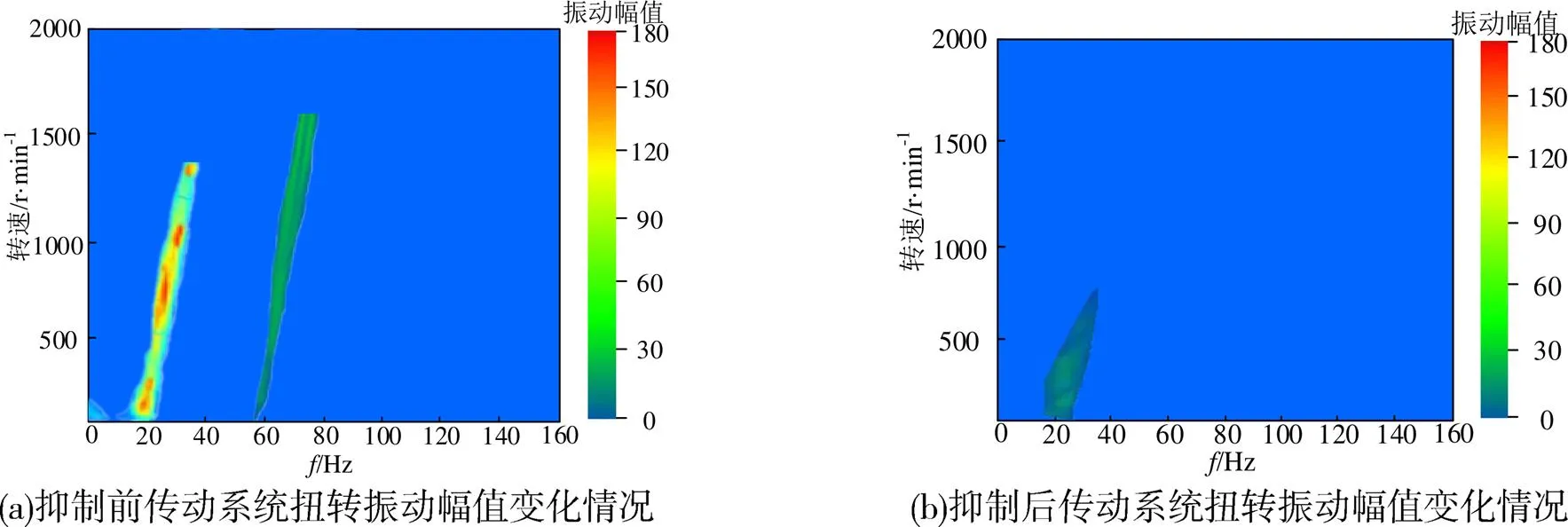
图4 抑制前后传动系统扭转振动幅值变化情况
根据图4(a)可知,未采用本文方法自适应抑制前,频率为20Hz时,传动系统扭转振动幅值较大,频率为60Hz时,振动幅值逐渐变小;根据图4(b)可知,应用本文方法后,传动系统扭转振动幅值仅出现在20Hz频率处,且振动幅值较小。综合分析可知,应用本文方法可有效自适应抑制传动系统扭转振动。
在不同运行工况下,当传动系统的固有频率与发动机输出扭矩的频率不匹配时,会加大能量损耗。为此,以电池能量衰减程度为指标,分析加减速工况、起动工况、高速工况3种不同运行工况下的能量损耗,结果如图5所示。
根据图5可知,按照电池衰减程度从高到低进行排序,发动机加减速工况的电池衰减程度高于高速工况与起动工况。混合动力汽车在加减速过程中,电池需要频繁地充放电,这可能会影响电池的循环寿命,导致发动机加减速工况的电池衰减程度较高;在高速行驶过程中,电池需要提供持续的动力输出,可能导致电池的放电深度较大,导致发动机电池衰减程度较高但低于加减速工况;混合动力汽车的起动过程通常需要电池提供较大的电流,但过程相对较短,因此电池衰减程度相对较低。
传动系统的振型受到多个因素的影响,如发动机输出扭矩、传动比、传动轴的长度和弯曲刚度、传动轴的转角等。其中,发动机输出扭矩是最主要的影响因素。为此,在不同运行工况下,分析其对运行过程中振幅的影响,结果如图6所示。
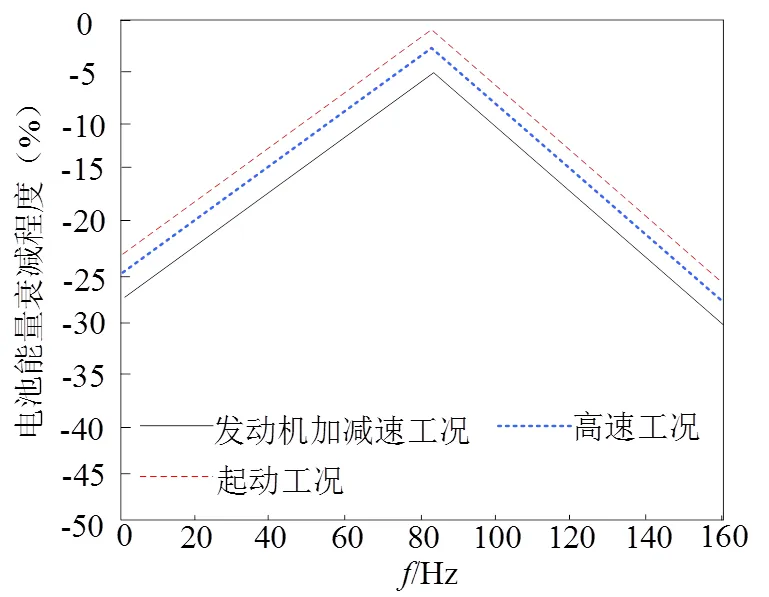
图5 不同工况下能量损耗变化情况
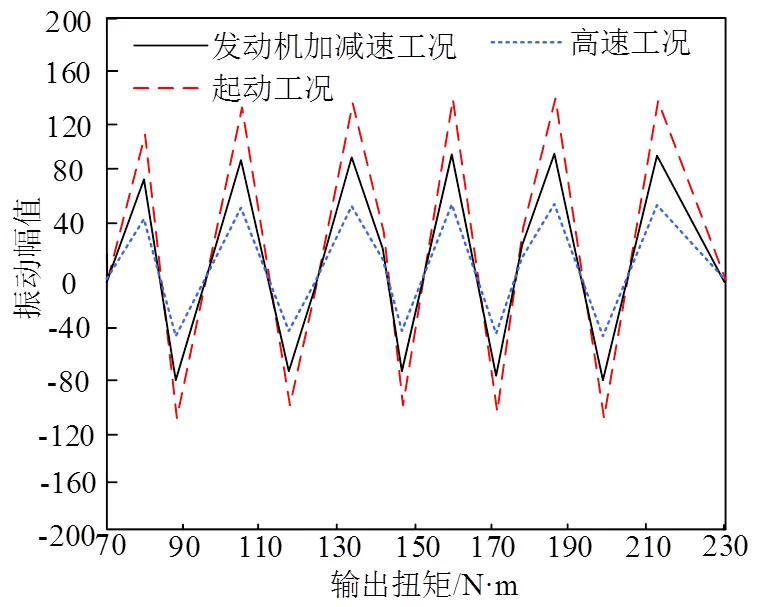
图6 不同工况下振幅变化情况
根据图6可知,混合动力汽车的起动过程通常需要电池提供较大的电流,这可能会引起传动系统的瞬态振动,从而导致振幅较高;在加减速过程中,由于传动系统需要快速地响应驾驶员的需求,因此可能会引发传动系统的瞬态振动,导致振幅较高;在高速行驶过程中,传动系统的振动通常比较平稳,因此振幅相对较低。
3 结论
应用混合动力汽车可缓解能源危机问题,为保证汽车舒适性与安全性,提出混合动力汽车传动系统扭转振动自适应抑制方法。本文在构建混合动力汽车传动系统动力学方程的基础上,通过建立混合动力汽车传动系统状态变量预测模型、时滞补偿和天牛须算法求解自适应控制模型,实现了混合动力汽车传动系统扭转振动自适应控制。通过本文研究可知,该方法自适应抑制后扭转角与发动机转速均无明显的振动现象;不同工况下电机-车轮转速差均未超过5r/min,自适应抑制精度较高;传动系统扭转振动幅值仅出现在20Hz处,且振动幅值较小。因此,本文方法可以精准自适应抑制扭转振动,确保汽车稳定运行,提升人们使用混合动力汽车的满意度。
[1] 刘芳,董效辰,张亚振,等. 基于AMEsim的汽车动力传动系统扭转振动分析及参数优化[J]. 机械强度,2022, 44(03): 509-516.
[2] BHATTACHARJEE D, GHOSH T, BHOLA P, et al. Ecodesigning and improving performance of plugin hybrid electric vehicle in rolling terrain through multi-criteria optimisation of powertrain[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(5): 1019-1039.
[3] AARON R, MULLANDREW C, NIXMARIO G, et al. Powertrain fuel consumption modeling and benchmark analysis of a parallel P4 hybrid electric vehicle using dynamic programming[J]. Traffic Science and Technology Journal, 2022, 12(4): 804-832.
[4] DENG T, ZHAO K, YU H. An adaptive equivalent consumption minimization strategy considering catalyst temperature for plug-in hybrid electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(7): 1375-1389.
[5] 陈星,彭丹,候宇,等. 混合动力汽车传动系统纯电动模式下扭振主动控制研究[J]. 机械科学与技术,2021, 40(07): 1114-1119.
[6] 张伟,刘辉,张勋,等. 机电复合传动系统扭转振动主从控制方法[J]. 汽车工程,2021, 43(09): 1402-1410, 1417.
[7] 刘艳,魏凯. 混合动力汽车动力系统建模与仿真[J]. 计算机仿真,2022, 39(09): 156-160, 171.
[8] RAMKUMAR M S, SIVARAM K M, AMUDHA A, et al. Hybrid electric vehicle power train configuration with battery management system[J]. Annals of the Romanian Society for Cell Biology, 2021, 25(6): 4255-4260.
[9] 郭栋,申志朋,李文礼,等. 电动汽车传动系统多工况动态传递误差分析[J]. 机械设计,2022, 39(02): 72-83.
[10] 高普,项昌乐,刘辉. 基于实车传动系统动力学特性的变刚度扭转吸振器减振控制[J]. 兵工学报,2022, 43(10): 2443-2450.
Adaptive suppression of torsional vibration of hybrid electric vehicle transmission system
DU Song
(Anhui Communications Vocational and Technical College, Hefei 230051)
In order to improve the comfort and safety of hybrid electric vehicles, a torsional vibration adaptive suppression method for the transmission system of hybrid electric vehicles is proposed. Based on the generalized Newton's second law of torque balance principle, the dynamic equation and state space equation of the transmission system are established. The state space equation is discretized, and a long short-term memory network is used to establish a transmission system state variable prediction model. By introducing an ideal delay value time-delay compensation discrete state space equation, the motor speed is obtained. A torsional vibration adaptive control model is established with the minimum motor-wheel speed difference and the minimum motor action change as the objective functions. The model is solved by the Longbull whisker algorithm to achieve torsional vibration adaptive suppression. Experimental results show that this method can effectively reduce the motor-wheel speed difference and achieve torsional vibration adaptive suppression. Under different working conditions, the motor-wheel speed difference is smaller after suppression using this method, indicating superior adaptive suppression effects.
hybrid electric vehicles;transmission system;torsional vibration;adaptive inhibition;neural network;Longbull whisker algorithm
U463.2
A
1007-984X(2023)06-0021-06
2023-04-13
2020年安徽省高等学校省级教学示范课“汽车电路和电气系统检修”(20sjsfk607);2020年安徽省高等学校质量工程“课程思政示范课程《汽车发动机构造与检修》”(2020szsfkc0310)
杜松(1987-),男,重庆涪陵人,讲师,硕士,主要从事车辆工程、汽车仿真、汽车维修、新能源汽车等研究,sunweitg@126.com。
猜你喜欢
疯狂英语·读写版(2023年12期)2023-02-20
中国造纸(2022年8期)2022-11-24
一重技术(2021年5期)2022-01-18
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
电子制作(2018年10期)2018-08-04
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
