基于自适应滤波长基线组合AUV定位算法
2023-11-11 09:35:56吴子敬
齐齐哈尔大学学报(自然科学版) 2023年6期
吴子敬
基于自适应滤波长基线组合AUV定位算法
吴子敬
(齐齐哈尔大学 计算机与控制工程学院,黑龙江 齐齐哈尔 161006)
:针对水下环境噪声干扰以及水下时延误差等问题,提出基于自适应滤波长基线组合AUV定位算法。该算法采用长基线组合导航定位系统,以捷联惯性导航系统为主,长基线定位系统为辅,消除时延误差实现误差补偿;再引入自适应滤波算法,使用卡尔曼滤波算法对系统进行信息融合来矫正累积误差实现自适应滤波定位。仿真实验表明,该算法能有效消除水下复杂环境中的噪声干扰对AUV定位精度的影响,提高算法对未知噪声的适应性和定位精度。
组合定位算法;误差补偿;水下自主航行器;水下传感器网络
深海资源的发掘在海洋勘探、海洋科学研究和海底资源开发及海上安全领域有着战略性意义。因此,需要新型水下无人运载平台助力海洋科考、海洋探测和海洋安全等工作。水下自主航行器(AUV)是具有高机动性和隐蔽性的新型水下无人运载平台,它可以进行大范围的救援搜索和资源探测。然而,为确保AUV长时间水下工作,必须采用高精度、高可靠性的导航定位系统[1-3]。由于水下环境的复杂性,不同的工作环境需要不同的组合导航定位方法。其中,捷联惯性导航系统(Strapdown Inertial Navigation System,SINS)是AUV导航定位系统的核心组件,具有抗干扰性,能在复杂水下环境中适应各种介质完成导航[4]。但是,SINS存在时间漂移累积的问题,导致长期稳定性不佳。因此,需要引入外部辅助导航手段进行误差补偿和修正,提高定位精度、可靠性和整个导航定位系统的性能[5]。高胜峰等[6]采用SINS/LBL组合导航序贯滤波方法,在缺失应答信号的情况下成功提高了组合导航定位系统的精度;张涛等[7]研究SINS/LBL紧组合系统量测方程的非线性影响,使用无迹卡尔曼滤波算法融合传感器信息。文献提出的算法主要集中在提高长基线(Long Baseline,LBL)自身的定位精度及改进组合导航滤波算法,针对水下环境噪声干扰、时延误差以及系统噪声难以量化的问题,提出基于自适应滤波长基线组合AUV定位算法。该算法采用长基线组合导航定位,以SINS为核心,LBL系统为辅进行误差补偿、消除时延误差,再引入自适应滤波算法,使用KF算法对系统进行信息融合矫正累积误差实现自适应滤波定位,消除水下复杂环境噪声干扰对AUV定位精度的影响,提高系统对未知噪声的适应性,从而提高导航定位精度。
1 自适应滤波长基线组合模型的建立与学习
1.1 长基线水声定位模型构建
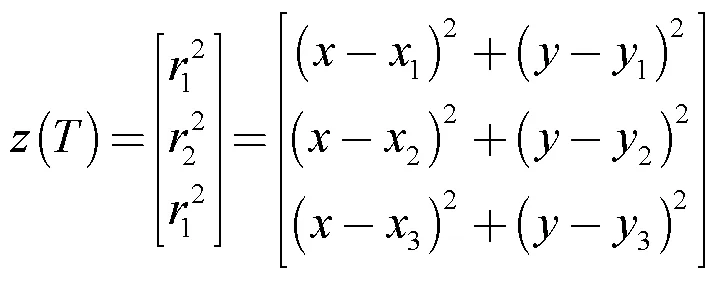
在水下环境中,水声定位系统利用声波测量水下目标的位置、跟踪水下目标的运动状态。水声定位系统被广泛应用于海洋科学、海洋资源勘探、水下测绘、水下工程、军事等领域。具有传播速度快、传输距离远的优点,能够实现长距离的测量和定位。同时,水声信号可以穿透海水和泥沙等物质,适用于复杂的水下环境。水声定位系统根据基线长度的不同分为LBL、SBL和USBL。由于LBL定位系统的水声接收器间距较大,可以测量更大的时间差、得到更准确的目标位置。LBL定位系统还能实现多目标同时定位,应用范围更广[8]。

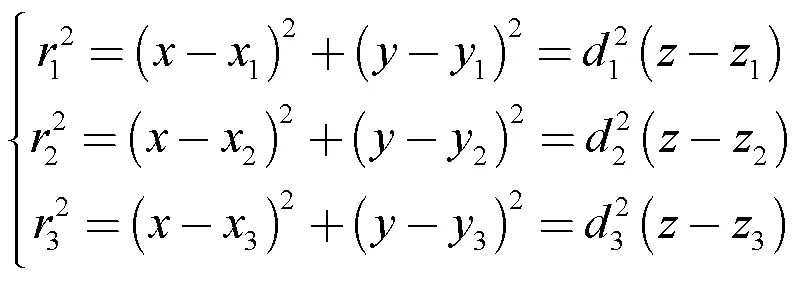
图1 长基线水声定位系统
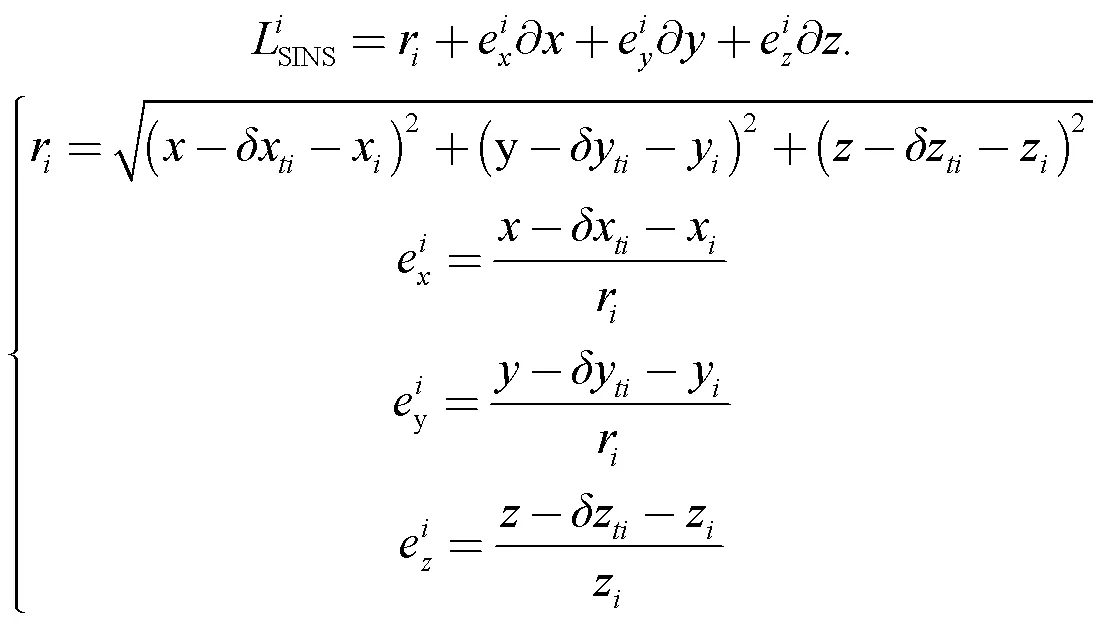
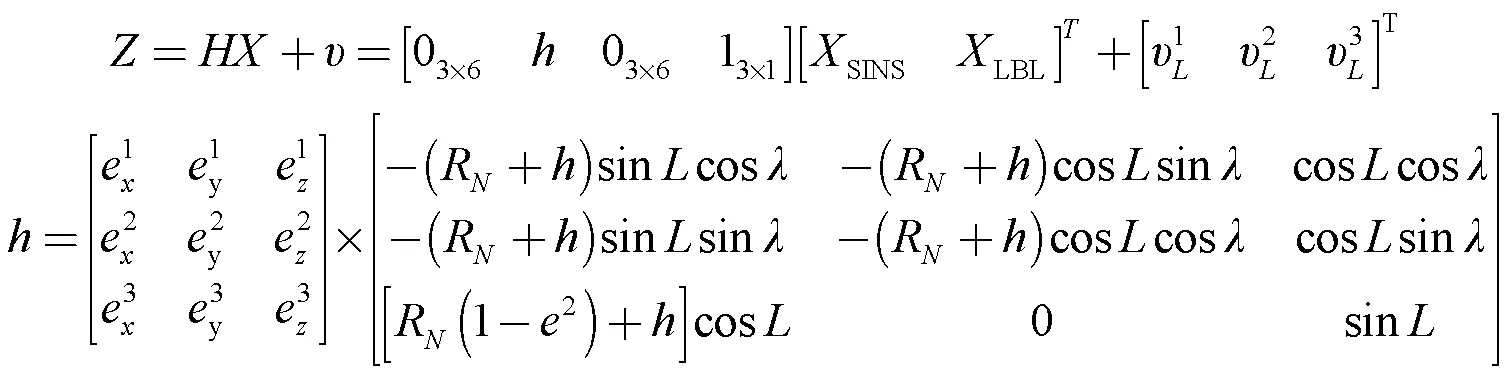
结合式(1)设置量测
1.2 捷联惯性导航系统模型构建
SINS通过测量加速度计和陀螺仪输出的信号,计算出物体的位移、速度和姿态等信息,从而实现导航和定位。但是,SINS的误差随时间累积导致长期稳定性差,因此需要采用GPS、水声测距与定位技术、地球物理导航技术和协同导航技术等外部辅助导航手段对其进行补偿修正,提高导航定位的精度和可靠性。SINS根据不同的导航坐标系可分为平台式和捷联式:平台式惯性导航系统采用物理平台模拟导航坐标系的基本原理,捷联惯性导航系统则采用数学算法确定导航坐标系。随着定位精度要求的不断提高,单一的导航系统已经不能满足高精度的定位要求,组合导航定位方法成为现代导航定位应用中的重要方法,ZHANG等[9]采用DVL和SINS组合导航,通过航位推算进行位置估计。然而,当采用这种方式进行定位时,定位误差仍会随着时间的推移而累积。SINS的误差主要来源于:一种是器件误差,例如,传感器和加速度计的零漂、比例漂移和非正交性等;另一种是环境误差,例如,温度变化、加速度变化、振动和重力变化等。SINS的测量误差可以使用KF、EKF、UKF、粒子滤波和神经网络等算法进行误差补偿和校正,通常使用KF算法根据系统模型和观测模型对传感器和加速度计的误差进行估计和校正。
1.3 组合导航定位系统模型构建
组合导航定位系统由惯性测量单元、全球定位系统、水声定位系统、深度传感器、磁力计、处理器和软件构成,将多种传感器和算法与处理器和软件相结合,使用高性能的处理器和专门的导航软件实时处理和融合各种传感器的数据,实现AUV在水下的精确定位和导航,同时也可以提高AUV的自主性和安全性。
组合导航定位系统能够实现AUV在水下的高精度定位和导航,被广泛应用于海洋科学研究、海底资源勘探、水下测绘等领域。许多公司和科研团队都在研究开发组合导航系统,表1概括了典型组合导航定位系统。
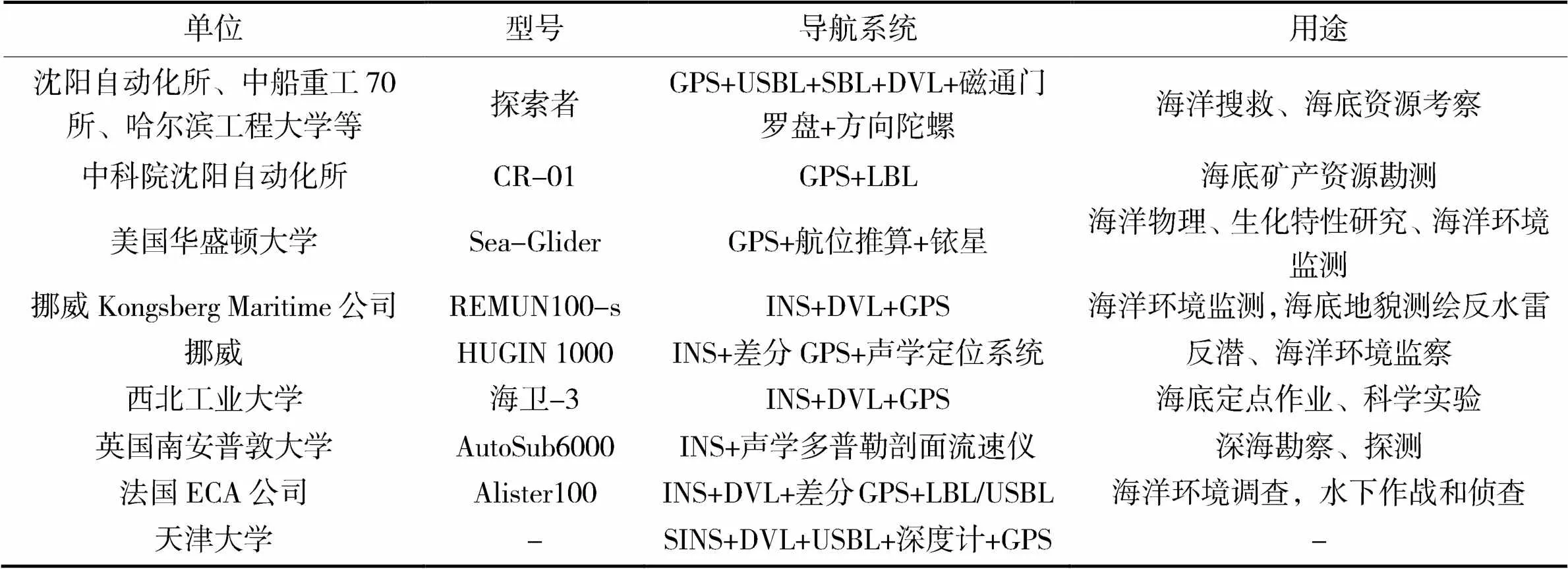
表1 组合导航定位系统研发应用情况
LBL/SINS组合导航定位系统通过融合LBL系统提供的位置信息和SINS提供的姿态和速度信息,实现水下目标的高精度定位和导航。LBL系统提供的位置信息用来校正SINS的位置误差,而SINS提供的速度和姿态信息则用来补偿LBL系统的水声信号传输衰减的影响,组合导航定位系统比单一定位系统的定位精度更高。

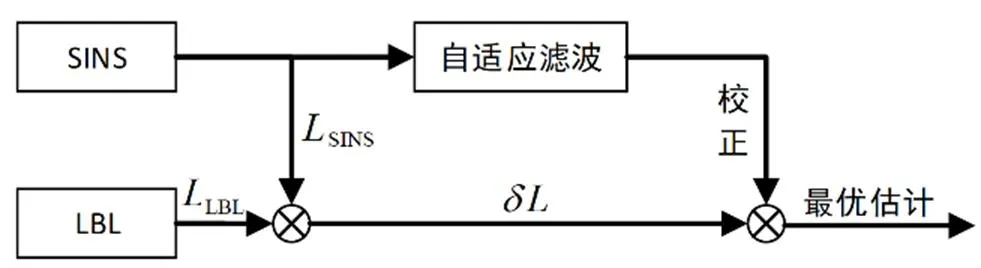
图2 组合导航定位系统结构
2 自适应滤波长基线组合AUV定位算法
观察组35例患者中显效21例、有效11例,治疗总有效率为91.4%, 而对照组35例患者中显效11例、有效15例,治疗总有效率为74.3%,两组比较,差异有统计学意义(P>0.05),见表1。


由式(5)~(8)可得,长基线组合导航定位系统的状态量和状态方程分别为





3 仿真实验对比分析
3.1 实验参数设置
3.2 定位轨迹分析
使用AUV深度传感器测量深度信息解决SINS的高通道发散问题,并且通过对比分析评估定位精度,如图3(b)所示。通过比较纯惯性导航定位算法和自适应滤波长基线组合定位算法(组合算法)的仿真轨迹,如图3(c)所示,发现随着时间的增加,纯惯性导航定位算法的定位误差呈现增长发散趋势。在没有外部信息参考的情况下,仅依靠纯惯性导航定位算法无法满足AUV水下导航定位的高精度要求。相比之下,组合算法提供了位置参考,能抑制SINS误差的累积,从而提高AUV定位精度。
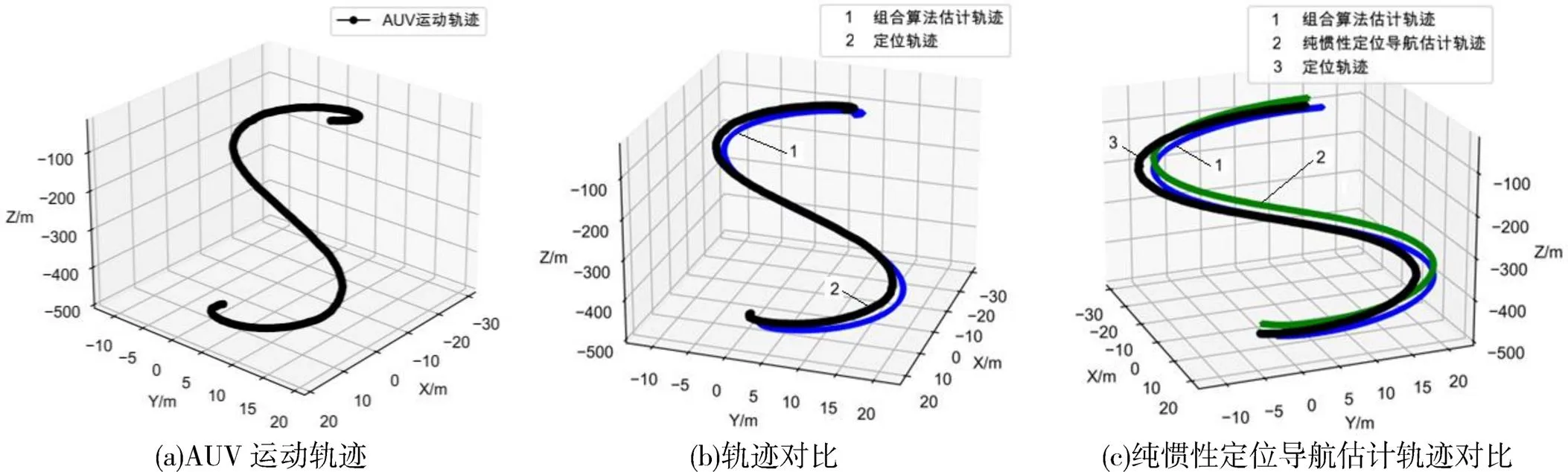
图3 三维运动轨迹
3.3 误差分析

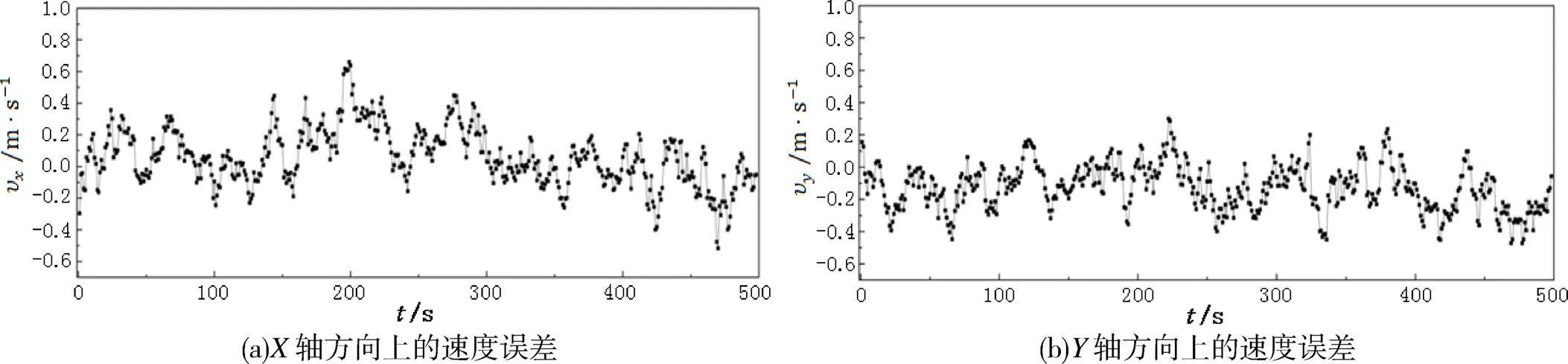
图4 基于KF滤波算法的速度误差

图5 基于自适应滤波长基线组合定位算法的速度误差

图6 基于KF滤波算法的定位误差
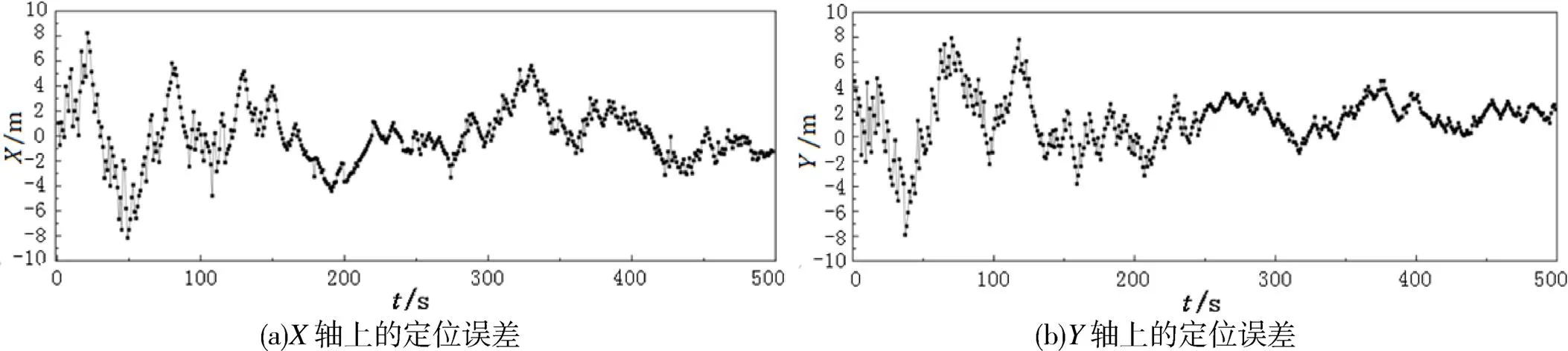
图7 基于自适应滤波长基线组合定位算法的定位误差
4 结论
本文提出基于自适应滤波长基线组合AUV定位算法解决水下复杂环境中的噪声干扰以及水下时延误差问题。该算法采用长基线组合导航定位系统,以SINS为核心,以LBL系统为辅进行误差补偿和消除时延误差,再引入自适应滤波算法,利用KF算法对系统进行信息融合矫正累积误差,实现自适应滤波定位。仿真实验表明,本文算法的速度误差明显低于纯惯性导航定位算法和传统KF算法,在定位误差上更是远低于纯惯性导航定位算法和传统KF算法。在水下环境噪声干扰较强时,本文算法有着更高的定位精度和抗干扰能力,解决了水下复杂环境中的噪声干扰对AUV定位精度的影响,提高系统对未知噪声干扰的适应性。
[1] PAULL L, SAEEDI S, SETO M, et al. AUV navigation and localization: a review[J]. IEEE Journal of Oceanic Engineering, 2013, 39(1): 131-149.
[2] ZHAO T, LIU M, ZHOU L. A survey of autonomous underwater vehicle recent advances and future challenges[J]. Fire Control and Command Control, 2010, 35(6): 1-6.
[3] ES-SADAOUI R, GUERMOUD M, KHALLAAYOUNE J, et al. Autonomious underwater vehicles navigation and localization systems: a survey[J]. Smart Application and Data Analysis for Smart Cities (SADASC'18), 2018.
[4] 秦永元,张洪钺,王叔华. 卡尔曼滤波与组合导航原理[M]. 西安:西北工业大学出版社,2012.
[5] 张同伟,刘烨瑶,杨波,等. 水下声学主动定位技术及其在载人潜水器上的应用[J]. 海洋技术学报,2016, 35(2): 56-59.
[6] 高胜峰,陈建华,朱海. SINS/LBL组合导航序贯滤波方法[J]. 仪器仪表学报,2017, 38(5): 1071.
[7] 张涛,石宏飞,陈立平,等. 基于UKF的SINS/LBL水下AUV紧组合定位技术[J]. 中国惯性技术学报,2016, 24(5): 638-642.
[8] 梁益丰,许江宁,吴苗,等. AUV导航技术概述[J]. 舰船科学技术,2020, 42(8): 152-156.
[9] ZHANG T, XU X S, LI Y, et al. AUV fault-tolerant technology based on inertial navigation and underwater acoustics assisted navigation system[J]. Journal of Chinese Inertial Technology, 2013, 21(4): 512-516.
AUV localization algorithm based on adaptive filtering and long baseline combination
WU Zi-jing
(College of Computer and Control Engineering, Qiqihar University, Heilongjiang Qiqihar 161006, China)
To address the issues of underwater environmental noise interference and underwater time delay, an adaptive filtering based long baseline combination AUV localization algorithm is proposed. This algorithm adopts a long baseline integrated navigation and positioning system, with the SINS as the main system and the LBL positioning system as the auxiliary system to eliminate delay errors and achieve error compensation. Then, an adaptive filtering algorithm is introduced, and the Kalman filtering algorithm is used to fuse information in the system to correct accumulated errors and achieve adaptive filtering positioning. Simulation experiments have shown that this algorithm can effectively eliminate the impact of noise interference on AUV positioning accuracy in complex underwater environments, and improve the algorithm's adaptability to unknown noise and positioning accuracy.
combined positioning algorithm;error compensation;AUV;underwater sensor network
TP212.9
A
1007-984X(2023)06-0027-07
2023-05-07
吴子敬(1965-),男,黑龙江齐齐哈尔人,副教授,硕士,主要从事电气控制、数控技术研究,2466550354@qq.com。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
湖北农机化(2020年4期)2020-07-24 09:07:44
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
中国惯性技术学报(2015年1期)2015-12-19 13:11:49
声学技术(2014年1期)2014-06-21 06:56:22