
基于直方图分析和自适应遗传的雷达道路目标识别特征优选方法
2023-11-06 08:57瓦其日体赵志纯则正华
雷达学报 2023年5期
瓦其日体 李 刚 赵志纯 则正华
①(清华大学电子工程系 北京 100084)
②(深圳北理莫斯科大学 深圳 518172)
③(广东省智能感知与计算普通高校重点实验室 深圳 518172)
1 引言
近年来,毫米波雷达因其能够穿透雨、雾、烟、灰尘,不受光照条件影响而全天时、全天候工作[1],同时还具有体积小、重量轻、空间分辨能力高[2]等优点而受到道路运动目标识别领域的广泛关注。道路目标的运动特性使同一目标的不同散射点的距离和速度信息更容易被毫米波雷达观测到,因此距离多普勒(Range-Doppler,RD)谱被广泛应用于雷达道路目标识别领域[3]。在得到目标的RD谱之后,提取和目标相关的微动和微距特征对目标进行有效识别。雷达目标识别领域特征提取时可依据自动和手动分为两类,自动特征提取一般是将RD谱、合成孔径雷达(Synthetic Aperture Radar,SAR)图像等直接输入到神经网络中从而获得大量的特征,比如文献[3]提出了一种融合卷积神经网络和长短时记忆网络的方法对RD谱进行特征提取从而完成对人体跌倒的检测。文献[4,5]利用深度学习方法对海上舰船的SAR图像进行检测识别,实验表明RetinaNet及其改进的网络是近年来雷达目标识别领域深度学习方法中性能较好的网络之一。文献[6]则将RD谱和改进的RetinaNet网络相结合,对自行车、汽车、行人和货车等道路目标进行分类识别,实验表明相比于VGG16+FPN+BN+data enhancement,ResNet50+FPN+BN+data enhancement,ResNet101+FPN+BN+data enhancement等5种网络,改进RetinaNet的识别性能最优。虽然深度学习网络能够自动提取特征,但它们对抽象特征和大数据集的过度依赖,完全舍弃了传统成熟的手动特征,给特定目标的针对性学习以及识别准确性的进一步提升带来限制[7]。而手动特征提取通过充分利用目标的先验信息,对目标的RD谱分布进行统计分析提取具有针对性的特征,从而达到对特定目标分类的效果。比如文献[8]通过对RD谱提取散射点个数、目标散射点占距离单元个数、目标散射点占速度单元个数等特征完成对行人和汽车的有效识别。文献[9]通过对RD谱提取径向速度、距离维峰值信号方差和速度维峰值信号方差等特征完成对行人、横向汽车以及纵向汽车的分类。上述方法利用较少数量的特征完成了对目标的有效识别,但是在目标种类多变且目标特性相近时,上述方法的性能受限。针对上述问题,通过增大特征数量来提高识别性能是一个常用的有效方法。然而特征维数的增多,不但会造成维数灾难[10],有时甚至会因为特征向量包含有和目标无关的信息导致识别性能降低[11]。因此,从所提取的高维特征集中进一步优选得到使识别性能更高的特征组合,就显得尤为重要。
目标识别领域的特征选择方法一般可分为过滤法和包装法[12]两类,其中过滤法是根据信息论[13]、主成分分析(Principal Component Analysis,PCA)[14]等特定的统计标准对特征进行排序[15],之后选取前N维特征作为新的特征集从而达到特征优选的目的。文献[16]针对人体目标识别中人体微多普勒特征的优选问题,提出用互信息计算特征的贡献值作为特征的物理相关性和估计质量的函数,从而对特征重要度进行排序,实现了特征优选和对人体运动状态的有效识别。文献[17]针对5类飞机目标的分类识别问题,通过利用PCA对波形熵、中心矩和信号幅度方差等特征进行降维,该方法虽然特征选择时效较高,但是特征评估函数与学习器相互独立,导致目标总体识别率不高。过滤法具有计算量小、特征选择时效较高的优点[18],但是由于此类方法的特征选择操作和后续的分类模型是相互独立的[19],往往使得分类性能受限。包装法则依赖于机器学习,利用筛选后的特征子集训练分类器,根据验证样本在分类器中的学习性能来评价特征子集的优劣[12]。遗传算法(Genetic Algorithm,GA)是最常用的包装式特征选择算法之一,文献[20]针对极化合成孔径雷达(SAR)图像分类提出了一种基于GA特征选择的分层分类算法,得到了更好的识别效果。文献[21]首次将GA应用于SAR图像的特征选择中,用GA和贝叶斯鉴别器得到最优特征组合。文献[22]提出了一种基于GA的SAR图像监测系统,用于洪涝灾害的检测。但是当特征维数增多时,特征组合数呈指数型增长,导致GA随机搜索时无法快速收敛获得最优解[23],这一缺陷限制了GA在高维特征集中特征选择领域的应用。针对这一问题,文献[24,25]提出了一种PCA和GA相结合(PCA-GA)的特征选择算法,先利用PCA算法对原始特征集进行降维,将降维后的特征输入到GA加快特征选择算法的收敛速度。然而该算法在特征集预降维阶段仅考虑了特征间的相关性,未对特征组合与目标类别的匹配度进行考虑,从而使得识别性能受限。文献[26,27]提出了一种基于ReliefF的改进自适应遗传(ReliefF-IAGA)特征选择算法,该算法首先使用ReliefF算法获得特征重要性得分,并消除不相关的特征,接着利用自适应遗传算法(Adaptive Genetic Algorithm,AGA)得到优选特征子集。文献[28]提出了基于信息增益(Information Gain,IG)和GA (IG-GA)的特征选择方法,首先利用IG得到每个特征的信息增益值作为预降维依据,设定阈值对待选特征集进行预降维后利用GA得到最终的特征子集。然而上述方法在预降维阶段仅考虑了单个特征与目标类别的相关性或者信息增益,忽略了特征组合与目标类别的相关性,导致优选后的特征组合对目标类别的区分度有限。
针对该问题,本文通过在自适应遗传算法框架中引入直方图分析[29]考虑不同特征组合与目标类别的相关性,提出了一种基于直方图分析和自适应遗传(Adaptive Genetic Algorithm via Histogram Analysis,HA-AGA)的雷达道路目标识别特征优选方法。该算法首先通过AGA迭代搜索得到由各代平均F测度最高的特征组合构成的特征组合库,接着引入直方图分析统计该特征组合库中各特征的分布频次。频次较高的特征构成的特征组合与目标类别匹配度更高,因此选取频次最高的K维特征输入到AGA优选出使目标识别精度更高的特征组合。基于毫米波雷达实测数据集和公共数据集CARRADA[30]上的实验表明,与PCA-GA[24,25],ReliefF-IAGA[26,27],IG-GA[28]3种方法相比,本文提出的方法选出的特征组合与目标类别相关度更高,能够得到更高的识别准确率。
2 自适应遗传算法
自适应遗传算法[26]是对传统遗传算法[31]的遗传操作步骤进行改进得到的具有随机搜索特性的优化方法,具体算法流程如下:
步骤1 参数初始化。将待优选特征集中的各特征组合以“基因”的形式编码成染色体x。编码规则可根据实际情况选择二进制编码、浮点数编码以及符号编码等方式。随机生成M条染色体组成初始种群W1={x11x12...x1M},染色体xij表示第i代的第j个特征组合。
步骤2 搜索迭代。假设迭代i-1次后得到第i代种群Wi={xi1xi2...xiM},为判断第i代种群Wi里各特征组合的优劣,并给接下来的自适应遗传操作提供依据,由式(1)计算每个特征组合的适应度:
其中,操作 F是将该特征组合输入到机器学习分类器后得到相应的适应度fitnessij,对Wi中的每一个特征组合都计算适应度后得到第i代种群的适应度向量FITi=[fitnessi1fitnessi2...fitnessiM]。接着对Wi进行双重轮盘赌选择,将Wi={xi1xi2...xiM}中所有染色体根据适应度向量FITi从大到小进行排序得到={yi1yi2...yiM},染色体yij被选择的概率为
得到={yi1yi2...yiM}中所有染色体被选择的概率后,将[0,1]根据中每条染色体被选择的概率分成M段,接着随机生成M个[0,1]之间的数,染色体被选择的概率越大,对应的区间长度越长,随机产生的数字落入该区间的概率越大,统计落在各个片段的数量,并选择数量最多的片段对应的染色体zi1存入种群,则适应度越大的染色体被选中的概率越大。重复选择直到=M,选择完成后得到={zi1zi2...ziM}。然后进行自适应交叉,对于Wi′′中的染色体zij(j依次取1,2,···,M),在里剩下的染色体中随机选取另一条染色体zim(m=j),从zim中随机选取一个基因与zij中相同位置的基因以概率Pc进行互换得到新的染色体vij,遍历所有染色体得到={vi1vi2...viM}。最后进行自适应变异,对于中的染色体vij(j依次取1,2,···,M),随机选取某个基因以概率Pm进行突变得到新的染色体,遍历所有染色体后得到下一代种群Wi+1。其中自适应交叉概率Pc和变异概率Pm为
其中,Pa0为设定的初始交叉或变异概率,fitnessj(j=1,2,···,M)为各染色体对应的适应度,fitnessmax为当代最优适应度,fitnessavg为当代平均适应度。
步骤3 重复步骤2直到进化代数达到预设的最大代数I。当迭代结束后适应度最高的特征组合即为最终选择结果。
3 基于直方图分析的改进自适应遗传特征优选方法
3.1 RD谱特征集的构建
为对道路目标进行有效识别,本文所提方法对目标RD谱中的散射点分布特点进行统计分析提取波形熵、能量密度等30个特征构建RD谱特征集。在特征提取之前需要对雷达回波数据进行预处理得到只包含单个目标信息的RD谱,具体处理流程如图1所示。在得到雷达回波后首先进行2DFFT得到原始RD谱[3],接着将RD谱中径向速度小于某个预设的速度参数值v的速度单元置零,去除静止或者低速度杂波。然后运用2D-CFAR算法进行目标检测,去除其他噪声从而得到只包含目标信息的RD谱。最后判断目标个数,若为单个目标,则直接得到只包含单个目标信息的RD谱;若为多个目标,则利用DBSCAN算法对不同目标的特征数据进行切割,得到只包含单个目标信息的RD谱,并根据雷达回波对应的光学视频对RD谱中的目标进行区分和标注。预处理完成后,根据RD谱中散射点的分布特点,分别从RD谱的距离维、速度维和距离速度两维联合分布进行统计分析提取平均距离、平均速度、能量密度、波形熵等30个特征构建高维特征集F=[f1f2...f30],如表1所示。其中,s表示RD谱的散射点个数,ri,vi和Ai(i=1,2,...,s)分别表示每个散射点对应的距离、速度和幅值,N ×M为RD谱的尺寸,A(n,m)表示位于(n,m)点的散射点幅值,Ag(g=1,2,...,G)表示每个距离单元(或速度单元)里幅值最大的散射点的幅值,G表示某个目标的RD谱中散射点占据的距离单元(或速度单元)个数,,表示距离(或速度)维峰值点所占的比重,AG=表示距离(或速度)维平均幅值,表示该点幅值占所有点幅值中的比重,和分别表示距离维方向和速度维方向上的质心,Ai表示所有散射点的平均幅值。峰值点及其周围T个点均为主分量,剩下的点为副分量。

图1 数据预处理流程图Fig.1 Data preprocessing flow chart
3.2 基于直方图分析的特征优选
为了加快AGA的收敛速度,通过充分考虑不同特征组合与目标类别的匹配度对待选特征集进行预降维并保留与目标类别相关度较高的特征组合。该方法具体流程如图2所示,描述如下:

图2 基于直方图分析的特征优选流程图Fig.2 Flow chart of feature optimization via histogram analysis
步骤1 根据AGA算法对特征组合进行编码,本文采用的编码方式为二进制编码,假设待选特征集F=[f1f2...fN]总共有N个特征,则编码后的特征组合x由N个“0”,“1”构成,且“0”,“1”的组合形式由特征组所包含的特征编号决定,比如x为“0101100”,代表该特征组合由第2号、第4号和第5号特征组成。编码完成后,随机生成M个特征组合作为接下来进行搜索迭代的初始特征组合库F1={x11x12...x1M},其中xij表示第i代的第j个特征组合编码之后的染色体。
步骤2 迭代搜索优秀特征组合库。假设迭代i-1次后得到第i代特征组合库Fi={xi1xi2...xiM},为对Fi中的每个特征组合的优劣提供评价指标,给各代最优特征组合的选择提供依据,进行特征组合适应度的计算。假设所有目标同等重要,且本文所提算法旨在优选出使目标识别性能更好的特征组合,因此将xij对应的数据集按一定比例随机分成训练集和测试集,对分类器进行训练和测试后分类器输出的平均F测度作为该特征组合的适应度fitnessij,平均F测度的计算公式为
其中,T为目标种类数,Pm=TPm/(TPm+TNm)和Rm=TPm/(TPm+FNm)分别为第m类目标的精确率和召回率。TP,TN和FN分别为真正例、真反例和假反例[32]。适应度越高,则该特征组合与目标类别的匹配度越高,识别性能越好。对Fi中的所有特征组合依次计算适应度得到Fi相应的适应度向量FITi=[fitnessi1fitnessi2...fitnessiM],根据FITi找到Fi中适应度最高的特征组合xib,将其存入优秀特征组合库Fbest中。存储完成后,通过对Fi依次进行双重轮盘赌选择、自适应交叉和自适应变异3个步骤得到下一代特征组合库Fi+1,再对Fi+1重复执行以上操作,不断地进行迭代搜索直到迭代次数达到预设的最大迭代次数I。迭代终止后,输出迭代I次得到的优秀特征组合库Fbest={x1bx2b...xIb}。
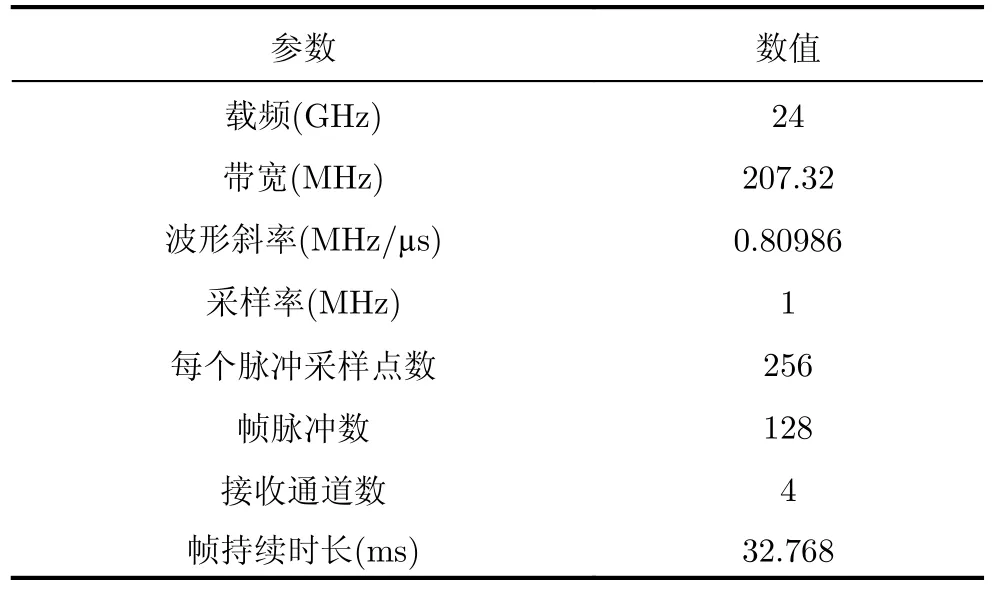
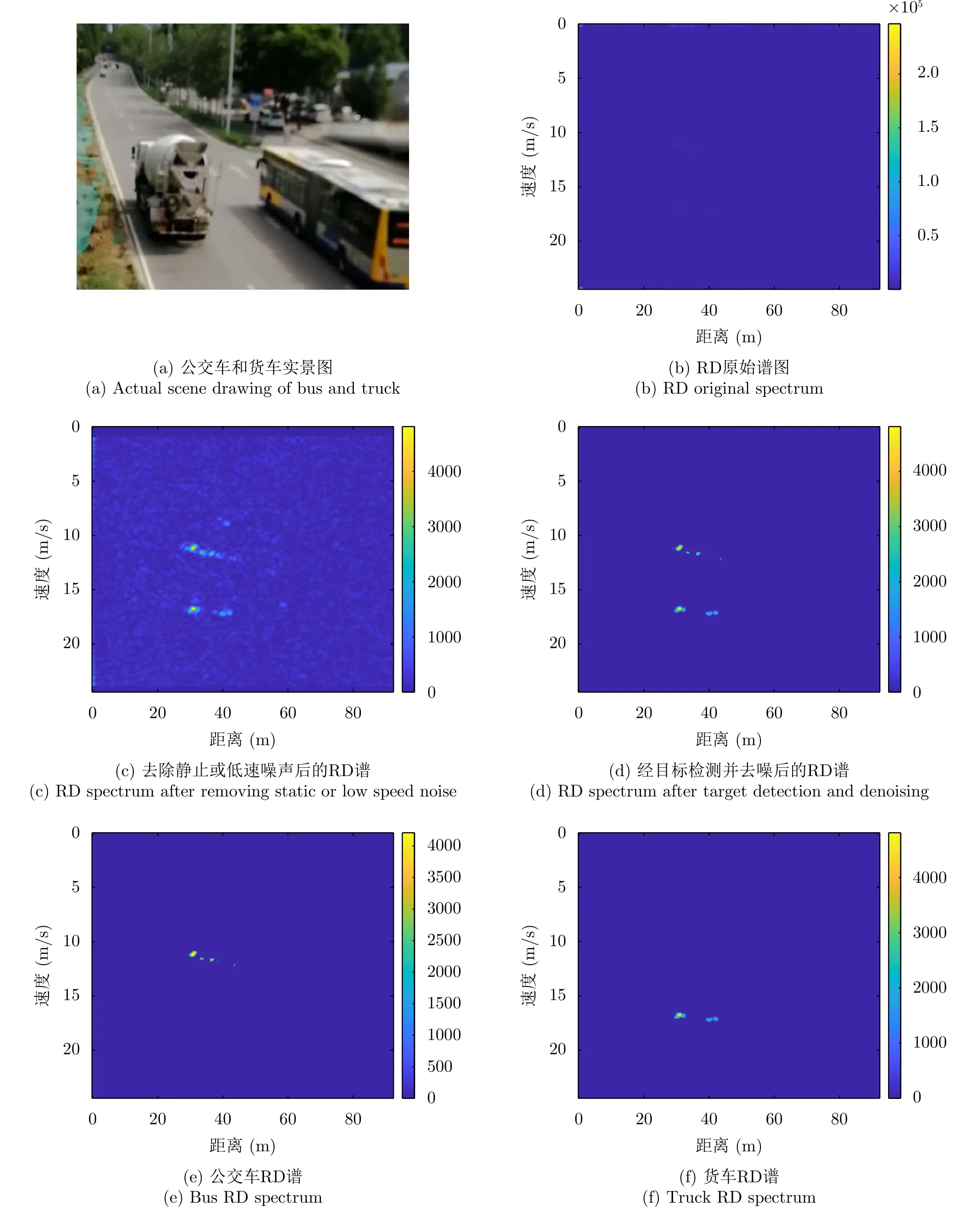
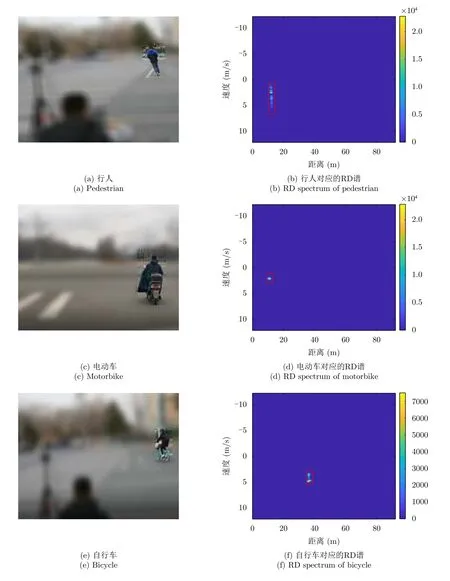
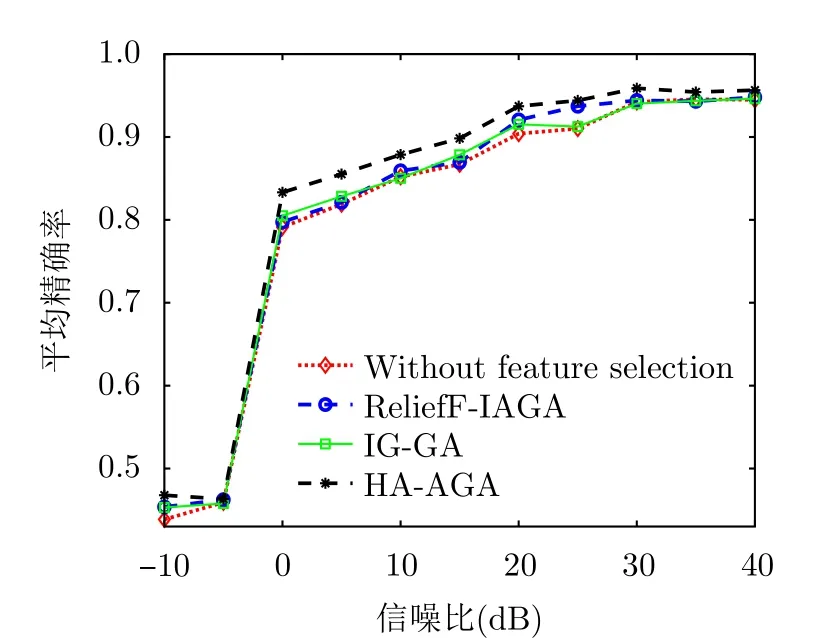
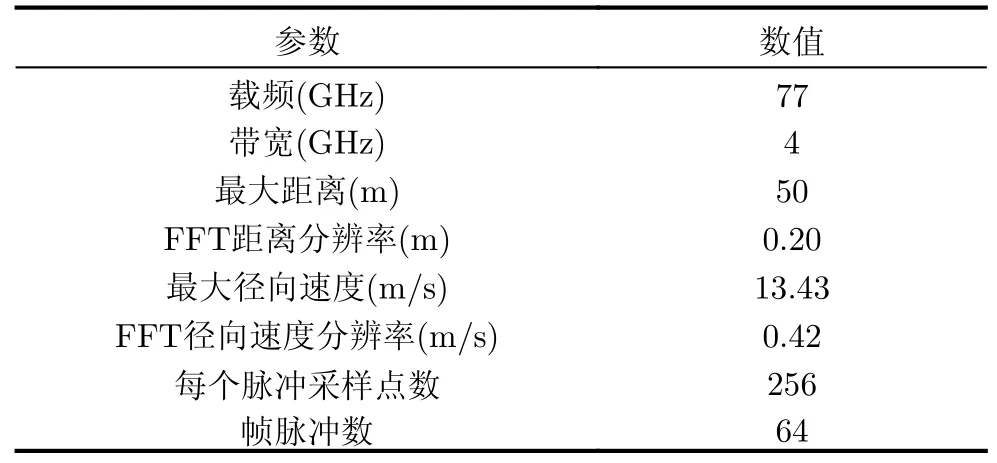
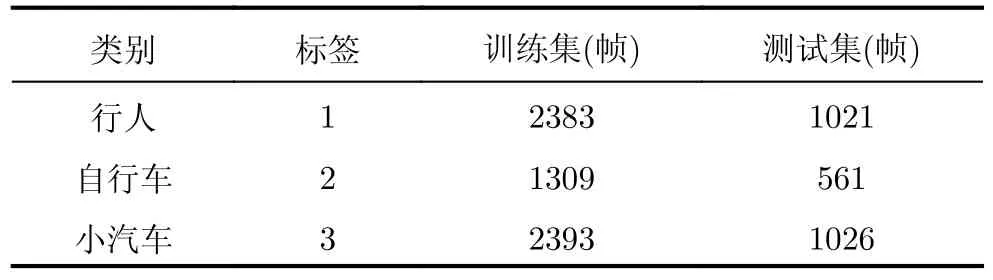
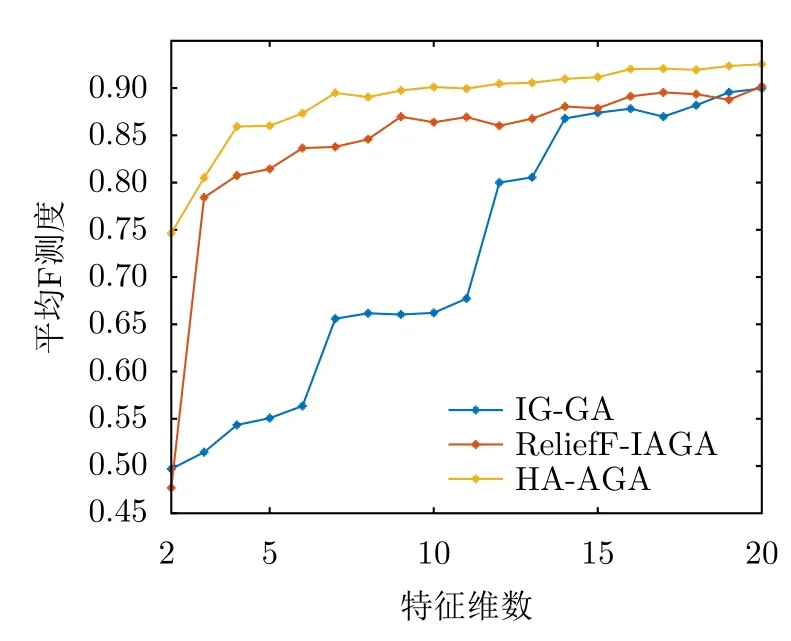
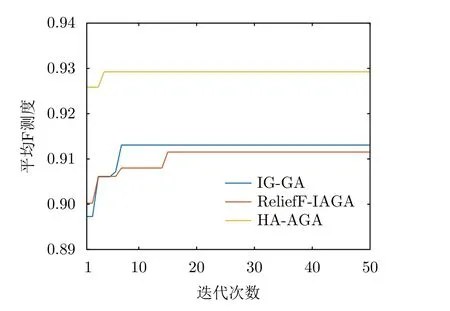
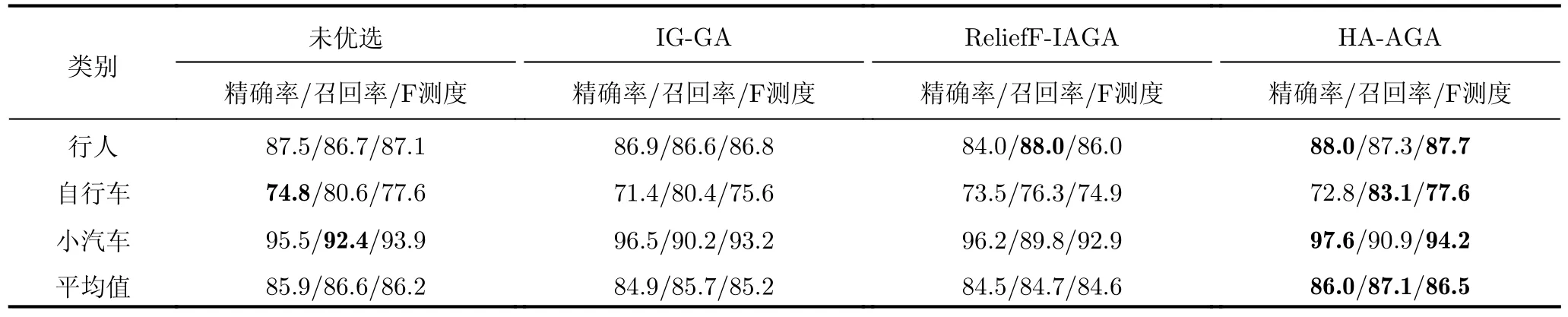
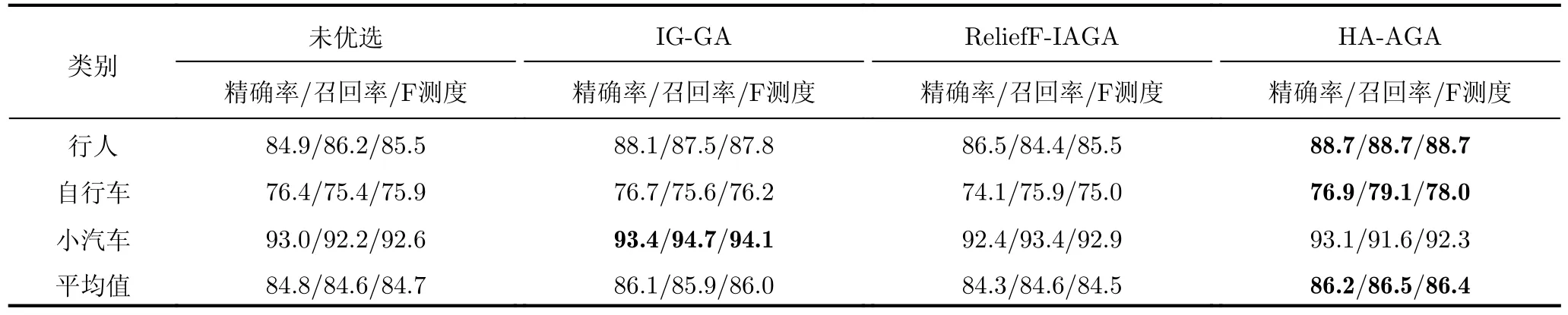
步骤3 为给待选特征集F=[f1f2...fN]T的预降维提供有效的特征选择依据,提高降维后的特征组合与目标类别的匹配度,利用直方图分析方法对步骤2得到的优秀特征组合库Fbest中每个特征出现的频次进行统计,将第i号特征fi(i=1,2,···,N)在优秀特征组合库Fbest中出现的频次qi(i=1,2,···,N)作为该特征的权重,遍历所有特征,最终得到待选特征集F=[f1f2...fN]对应的权重向量Q=[q1q2...qN]。权重越大的特征,其组合与目标类别的相关度越高,因此取权重最大的前K(K 步骤4 为进一步去除预降维后的特征子集F′中的冗余特征,将F′输入到AGA进行优选得到最终的特征组合。 通过HA-AGA得到优选的特征组合后,将该特征组合的数据集划分成训练集和测试集,并将训练集输入分类器进行模型训练和测试,得到最终的目标分类识别结果。 为验证本文提出的算法的有效性,将本文所提的HA-AGA算法和PCA-GA[24,25],ReliefF-IAGA[26,27],IG-GA[28]3种两阶段特征选择算法在毫米波雷达实测数据集和公开数据集CARRADA[30]两个不同的数据集上进行比较,以验证本文所提算法的有效性和优越性。 4.1.1 实验设置 在实验过程中,将毫米波雷达架设在路口、天桥(均为面向道路水平放置)等地方对行人、电动车、自行车、小汽车、货车和公交车6类道路目标进行测量采集,采集完成后首先进行数据预处理,其中去除静止或低速度杂波时的速度参数值v设为0.4 m/s,某个场景及其对应的雷达回波预处理结果如图3所示。雷达回波中包含有如图3(a)场景所示的公交车和大货车。图3(b)为该场景对应的原始RD谱,图3(c)为去除静止或低速度杂波后的RD谱,图3(d)为经2D-CFAR检测并去噪后的RD谱,因为该RD谱包含有两个目标,利用DBSCAN算法将不同目标分割开,图3(e)和图3(f)分别为数据切割后只包含公交车和货车信息的RD谱。预处理完成后得到有效数据共14607帧,将每类目标的数据按7:3的比例分为训练集和测试集进行特征选择与识别实验。表2为各目标类别的标签以及训练集和测试集的数量。具体的雷达参数如表3所示。该雷达体制为线性调频连续锯齿波,包含4个接收通道,载频为24 GHz,带宽为207.32 MHz,调频斜率为0.80986,采样率为1 MHz,每帧持续时间为32.768 ms且包含128个脉冲,每个脉冲采样点数为256。各目标实际场景以及相应的RD谱如图4所示,由图可看出行人和自行车的散射点占据的距离单元的个数(距离宽)明显比速度单元的个数(速度宽)少,而货车和公交车的情况恰好相反,电动车和小汽车的散射点占据的距离单元和速度单元的个数都很少。并且小汽车、货车和公交车的径向速度大于行人、电动车和自行车的径向速度,说明各目标的RD谱散射点分布存在差异,通过提取相应的特征可对道路目标进行有效识别。 表2 实测数据集描述Tab.2 The real radar dataset description 表3 雷达参数Tab.3 Radar parameters 图3 数据预处理各步骤实验结果Fig.3 Experimental results of each step of data preprocessing 图4 各类目标及其对应的RD谱Fig.4 All kinds of targets and their corresponding RD spectrum 进行特征选择实验时首先从道路目标RD谱提取如表1所示的高维特征集F=[f1f2...f30]作为待选特征集。HA-AGA的种群大小M,初始交叉概率Pc0和初始变异概率Pm0分别设为20,0.5和0.2,预降维阶段和优选阶段的最大迭代次数M分别设为100和50。PCA-GA,ReliefF-IAGA,IG-GA 3种算法的种群大小和迭代次数均设为20和50。各算法取权重最大的前20维特征(K=20)作为预降维后的特征子集。 4.1.2 实验结果与分析 为验证本文所提方法在特征优选方面的优越性,进行了不同算法结合集成装袋树的特征预降维和优选的对比实验,预降维实验中K的值从2取到20,得到的实验结果如图5所示,可知HA-AGA在K取不同值时得到的平均F测度均最高,表明本文提出的特征权重计算方法更加合理有效。且PCA-GA方法和其他3种方法相比,识别性能较差,因此在接下来的对比实验中将不再比较PCA-GA算法。特征优选实验结果如图6所示,可知本文所提方法在第5代即收敛,收敛速度最快且识别效果最好,各算法最终选出的特征组合如表4所示,本文所提方法和ReliefF-IAGA方法均选出了14维特征,IG-GA选出了11维特征,但IG-GA选出的特征组合的识别效果最差。本文所提方法特征优选前后的特征向量经PCA降维后的可视化分布图如图7所示。其中图7(a)为优选前的特征分布图,可知各目标的特征分布混叠较为严重,对目标的可分性较差。图7(b)为优选后的特征分布图,可看出各目标经过特征优选后的特征分布较分散,对目标的可分性较好。将优选前的特征集和各算法优选得到的特征组合分别输入到集成装袋树分类器进行目标识别实验,识别结果如表5所示,可知HA-AGA方法的识别效果最好,特别是平均精确率、平均召回率和平均F测度分别达到95.7%,93.0%和94.2%,分别比未进行特征优选时提高了1.8%,1.9%和2.0%,说明原特征集中确实存在特征冗余;比IG-GA提高了1.9%,2.1%和2.0%;比ReliefF-IAGA提高了2.4%,2.0%和2.3%。由此可知HA-AGA方法选出了与类别相关度更高的特征组合,选择效果更好。 表4 各算法优选后的特征组合Tab.4 Feature combination of different algorithms after optimization 表5 各算法结合集成装袋树优选后识别结果(实测数据集)(%)Tab.5 Recognition result of different algorithms combined with integrated bagging tree after optimization (Real radar dataset) (%) 图5 各算法特征预降维结果Fig.5 Pre-dimensionality reduction results of different algorithms 图6 各算法特征优选结果Fig.6 Feature optimization results of different algorithms 图7 由PCA降维得到的实测数据集特征优选前后可视化分布图Fig.7 Visual distribution of real data set features before and after optimization obtained by PCA dimension reduction 在利用集成装袋树分类器实验的基础上,为进一步分析和验证所提特征优选算法结合不同分类器对于其他特征优选算法的优势,将各算法分别与精细树和K最近邻(K-Nearest Neighbor,KNN)相结合进行实验,优选后的识别结果如表6和表7所示,可知与IG-GA,ReliefF-IAGA算法和未进行特征优选前相比,本文所提的HA-AGA算法结合不同分类器均具有不同程度的优势,表明所提算法具有一定的广泛适用性。 表6 各算法结合精细树优选后识别结果(实测数据集)(%)Tab.6 Recognition result of different algorithms combined with fine tree after optimization (Real radar dataset) (%) 为进一步验证本文所提方法的优越性,将本文所提方法和深度学习方法即改进的RetinaNet[6]进行对比实验,实验识别结果如表8所示。由表可看出本文所提方法与深度学习方法改进的RetinaNet相比,得到的所有指标均最高,表明了本文所提方法能得到更好的识别结果。 为验证本文所提方法的鲁棒性,进行了不同信噪比条件下各算法特征选择对比实验。实验结果如图8所示,可知,在–10 dB和–5 dB条件下各算法识别精度都很差,但总体而言,在不同信噪比条件下本文所提的HA-AGA算法均获得了最高的平均精确率,表明本文所提的HA-AGA特征优选方法对噪声具有更好的容忍性。 图8 不同信噪比条件下各特征选择算法识别结果Fig.8 The recognition results of feature selection algorithm in different SNR 4.2.1 实验设置 公共数据集CARRADA[30]提供了包括两个场景在内的行人、自行车和小汽车3类目标的RD谱,数据集所用雷达参数如表9[30]所示。该雷达载频为77 GHz,带宽为4 GHz,帧脉冲数为64,每个脉冲采样点数为256,最大探测距离为50 m,距离分辨率为0.20 m,最大径向速度为13.43 m/s,速度分辨率为0.42 m/s。首先通过对该数据集筛选并进行数据预处理,去除静止或低速度杂波时的速度参数v设为0.4 m/s。某个场景对应的雷达回波预处理实验结果如图9所示。雷达回波中包含有如图9(a)场景所示的自行车和小汽车,自行车向远离雷达方向行驶,小汽车低速靠近。图9(b)为该场景对应的原始RD谱,图9(c)为去除静止或低速度杂波后的RD谱,图9(d)为经2D-CFAR检测并去噪后的RD谱,因为该RD谱包含有两个目标,利用DBSCAN算法将不同目标分割开,图9(e)和图9(f)分别为数据切割后只包含小汽车或自行车信息的RD谱。预处理完成后得到有效数据8693帧,接着对每帧RD谱提取特征向量F=[f1f2...f30]构成RD谱特征集。将每类目标的数据按7:3的比例分为训练集和测试集,进行实验时各目标的类别标签以及训练集和测试集的数量如表10所示。特征选择实验中各特征选择算法的参数设置和4.1.1节一致。 表9 CARRADA数据集雷达参数[30]Tab.9 Radar parameters of CARRADA dataset[30] 表10 CARRADA数据集描述Tab.10 CARRADA dataset description 4.2.2 实验结果与分析 为验证本文所提方法的优越性,进行了不同算法结合集成装袋树特征预降维和优选的对比实验,预降维实验中K的值从2取到20,实验结果如图10所示,可知HA-AGA在K取不同值时得到的平均F测度均最高,表明本文提出的特征权重计算方法更加合理有效。特征优选的实验结果如图11所示,本文所提方法在第4代即收敛,收敛速度最快且识别效果最好,各算法最终选出的特征组合如表11所示。本文所提方法特征优选前后的特征向量经PCA降维后的可视化分布图如图12所示。其中图12(a)为优选前的特征分布图,可看出各目标的特征分布混为一簇,对目标的可分性较差。图12(b)为优选后的特征分布图,可知各目标的特征分布较分散,对目标的可分性有所提升。将优选前的特征集和各算法优选得到的特征组合分别输入到集成装袋树分类器进行目标识别实验,识别结果如表12所示,可知HA-AGA方法的识别效果最好,平均精确率、平均召回率和平均F测度分别达到93.0%,92.4%和92.7%,分别比未进行特征优选时提高了2.0%,1.7%和1.8%;比IG-GA均提高了1.2%;比ReliefF-IAGA提高了1.5%,1.7%和1.6%。由此可知HA-AGA方法选出了与类别相关度更高的特征组合,验证了本文所提方法的优越性。 表11 不同算法优选后的特征组合Tab.11 Feature combination of different algorithms after optimization 表12 各算法结合集成装袋树优选后识别结果(CARRADA)(%)Tab.12 Recognition result of different algorithms combined with integrated bagging tree after optimization (CARRADA) (%) 图10 不同算法特征预降维结果Fig.10 Pre-dimensionality reduction results of different algorithms 图11 不同算法特征优选结果Fig.11 Feature optimization results of different algorithms 图12 由PCA降维得到的CARRADA数据集特征优选前后可视化分布图Fig.12 Visual distribution of CARRADA data set features before and after optimization obtained by PCA dimension reduction 在利用集成装袋树分类器实验的基础上,为进一步分析和验证所提特征优选算法结合不同分类器对于其他特征优选算法的优势,将各算法分别与精细树和KNN相结合进行实验,优选后的识别结果如表13和表14所示,可知与IG-GA,ReliefF-IAGA算法和未进行特征优选前相比,本文所提的HA-AGA算法结合不同分类器均具有不同程度的优势,表明所提算法具有一定的广泛适用性。 表13 各算法结合精细树优选后识别结果(CARRADA)(%)Tab.13 Recognition result of different algorithms combined with fine tree after optimization (CARRADA) (%) 表14 各算法结合KNN优选后识别结果(CARRADA)(%)Tab.14 Recognition result of different algorithms combined with KNN after optimization (CARRADA) (%) 在毫米波雷达实测数据集和公共数据集CARRADA上的实验表明,与ReliefF-IAGA,IG-GA,未进行特征优选前和改进的RetinaNet网络相比,本文所提的HA-AGA方法获得了与目标类别相关度更高的特征组合,提高了目标的识别精度,且在实测数据集中的信噪比对比实验验证了本文所提算法具有更好的噪声鲁棒性。 随着自动驾驶技术的不断发展,道路目标识别领域中的特征优选技术受到社会各界的广泛关注。本文针对现有改进AGA特征优选方法因未考虑不同特征组合与目标类别的匹配度从而导致优选得到的特征组合对目标的区分度有限的问题,提出了一种基于直方图分析和自适应遗传的雷达道路目标识别特征优选方法。该方法在AGA框架中通过引入直方图分析对优秀特征组合库中各特征的频次进行统计,并选取频次最高的特征集输入AGA优选出与目标类别相关度更高的特征组合,以提升特征优选的效率和准确度。基于毫米波雷达实测数据集和公共数据集CARRADA的一系列对比实验表明与PCA-GA,ReliefF-IAGA和IG-GA等特征选择方法相比,本文所提方法结合不同分类器选出的特征组合与类别相关度最高,能够得到更高的识别精度,且对噪声的鲁棒性更强,适用性更加广泛。4 实验验证
4.1 毫米波实测雷达数据实验







4.2 公共数据集CARRADA实验



5 结语
猜你喜欢
计算机仿真(2022年8期)2022-09-28
电子制作(2017年23期)2017-02-02
中国塑料(2016年11期)2016-04-16
西北工业大学学报(2015年4期)2016-01-19
新校长(2016年8期)2016-01-10
商事法论集(2014年1期)2014-06-27
中国中医药现代远程教育(2014年16期)2014-03-01
振动工程学报(2014年4期)2014-03-01
计算机工程(2014年6期)2014-02-28
教育与职业(2014年16期)2014-01-19
