一种港口AGV运输交通路径规划仿真方法
2023-11-02 10:41董建军许新来陈昱丞王俊博
港口装卸 2023年5期
董建军 许新来 陈昱丞 王俊博
中交第三航务工程勘察设计院有限公司
1 引言
AGV(Automated Guided Vehicle,自动导航车)广泛应用于集装箱装卸的港口码头、堆场、立体仓库等物流领域。实际工程项目中,场地和道路的规划以及投运的AGV数量、行驶路径、行驶速度、转弯速度、集装箱装卸情况等,会影响其整体运营效率和能源消耗。因此,应在项目前期策划、规划阶段开展仿真研究,将道路数据、集装箱数量、AGV数量、行驶速度、门式起重机装卸集装箱速度等相关数据,通过各种组合,使用软件模拟,生成运行和结果数据,并对这些数据进行分析,得出本场景下最合理的资源配比和最优的路径算法。
2 路径规划仿真
2.1 场景规划
通过将真实项目场地的大小、布局、规模优化后,形成仿真基本框架要素,内容如下:海侧AGV行驶线路总长2 300 m、总宽530 m,4车道,每车道宽3 m,区域中间为AGV停车场。陆侧为集装箱堆场,共可堆放1 500(30×10×5)个集装箱。总体布局见图1。
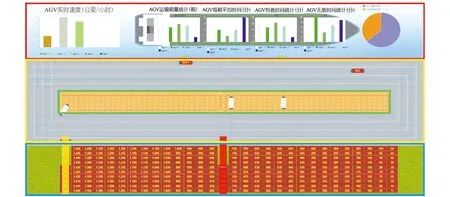
图1 场地规划及仿真
仿真模拟界面中,上部分为直方图、饼图显示,分别为:各AGV的实时速度、运输箱量统计、每箱平均时间、有效时间统计(行驶时间)、无效时间统计(在停车场时间)、AGV的总有效时间和总无效时间对比饼图。
仿真系统使用规则及作业任务流程见图2,具体为:
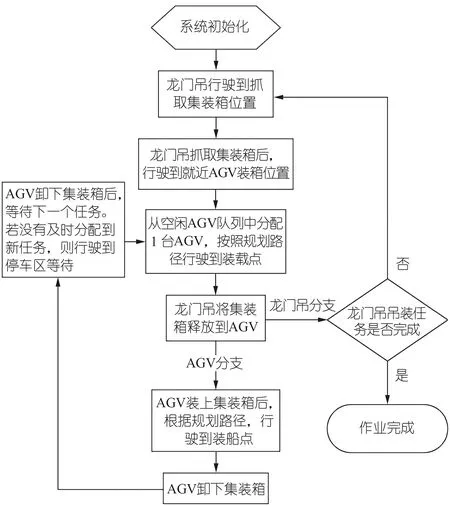
图2 作业任务流程
(1)系统初始化,输入集装箱数量、AGV数量及速度和路径算法等参数值。
(2)集装箱堆场设置2台龙门吊,第一台从最左侧往右吊取集装箱,第二台从中间往右吊取集装箱。
(3)海侧设置2个集装箱卸载点。
Shipping Carbon Tax and Green Road of Chinese Shipping Industry
(4)龙门吊抓取集装箱到AGV装载点。
(5)从AGV车队中选择1台空闲的AGV,让其行驶到装载点。
(6)AGV装上集装箱后,按照路径算法系统计算出的路径,行驶到卸载点卸掉集装箱。
(7)AGV卸完集装箱后,进入下一个运输任务;当没有任务时,行驶到AGV停车场。
2.2 路径优化算法
路径算法由python语言编程实现,采用Http Server部署。最短路径不一定是最优路径,过多转弯次数会引起频繁的加减速导致总体行驶时间变长。由于A*循迹计算速度明显快于Dijkstra循迹计算速度,本文选用A*路径算法并对其进行优化。
传统的A*路径算法公式为:
F(x)=G(x)+H(x)
(1)
通过在H(x)循迹方向上设置权值,可优化路径中的转弯次数。利用反三角函数收敛特征,经过反复演算,得出以下优化的A*路径算法,能够明显减少转弯次数并满足本文场景的循迹要求:
(2)
(3)
采用python编程,对比A*算法、Dijkstra算法、优化后的A*算法,循迹图见图3、图4。
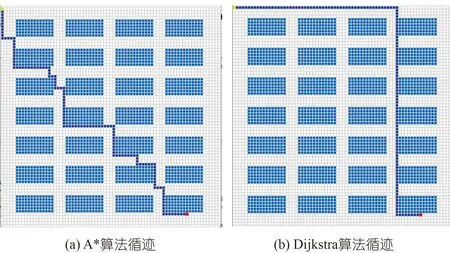
图3 A*及Dijkstra算法循迹
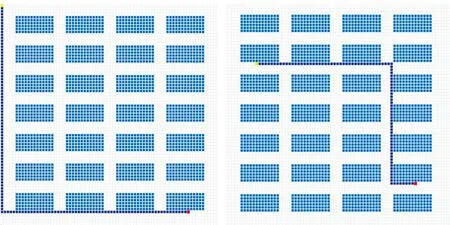
图4 优化后的A*算法循迹
2.3 路径冲突及解决策略
多AGV行驶中,会出现多辆车在同一时间对同一个节点或同一段路线通行权的竞争,从而会导致车辆之间出现冲突甚至死锁现象。冲突类型主要包括同向冲突、节点冲突、相向冲突。
2.3.1 同向冲突及解决
同向冲突指两车辆在某一时刻存在方向相同的重叠路径,车辆行驶速度后车大于前车或后车在加速度加持下能追上前车(见图5)。
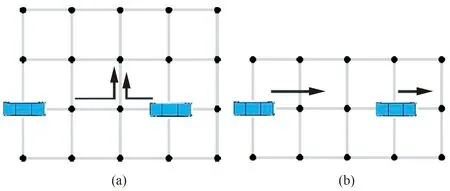
图5 同向冲突
解决策略为:当后车与前车存在同向冲突的可能性时,应指定后车停止加速、减速或停车等候,直至后车与前车的相对距离大于后车正在执行的最大加速距离,或者确保在后车即将追上前车之前,前车能够改变路径。
2.3.2 节点冲突及解决
节点冲突指两车辆经过同一节点时存在使用权争夺,但双方前序及后续路径不存在重叠(见图6)。
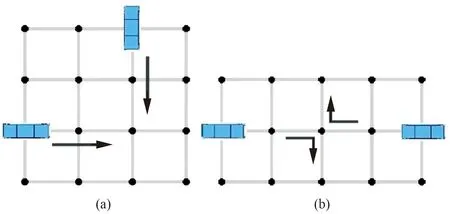
图6 节点冲突
解决策略为:先申请节点使用权的车辆对该节点拥有优先行驶权;后申请节点的车辆提前降速或改道。
2.3.3 相向冲突及解决
相向冲突是指两车辆在某一时刻存在方向相反的重叠路径,两车辆若按规划路径行驶会造成路径的死锁(见图7)。
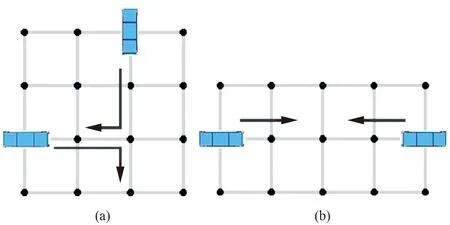
图7 相向冲突
解决策略为:保持高优先级车辆的行驶路线,并更改次优先级车辆的行驶路线,如重载车辆优先级大于空载车辆。若低优先级车辆通过冲突路段所耗费时间远小于替代路线时,冲突车辆可选择停车等待。
2.4 算法实现流程
AGV小车获取到运输任务时,系统开始为其计算行驶路径以及处理路径冲突,AGV小车运输行驶节点申请流程见图8。
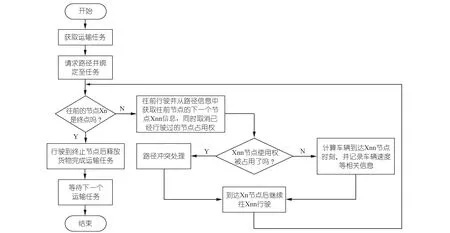
图8 节点申请流程图
3 仿真步骤及数据分析
通过以下步骤开展仿真模拟,获取运行数据:
(1)同一种路径算法,配置不同数量AGV(1~8辆),统计每辆AGV装箱量、每箱运输平均时间、有效时间、无效时间、有效时间占比,以及总历时、累积历时。
(2)使用不同路径算法,在相同的应用场景下多次模拟,记录结果数据。
(3)对结果数据采用图表法,分析AGV数量最优配比及各算法优劣。
以集装箱总数1 500箱、龙门吊2台、AGV直线行驶速度25 km/h、弯道速度5 m/s、加(减)速度2 m/s2为例,路径算法为仿真软件提供的默认最短路径计算方法时,AGV数量从1~8辆的仿真结果数据见表1。
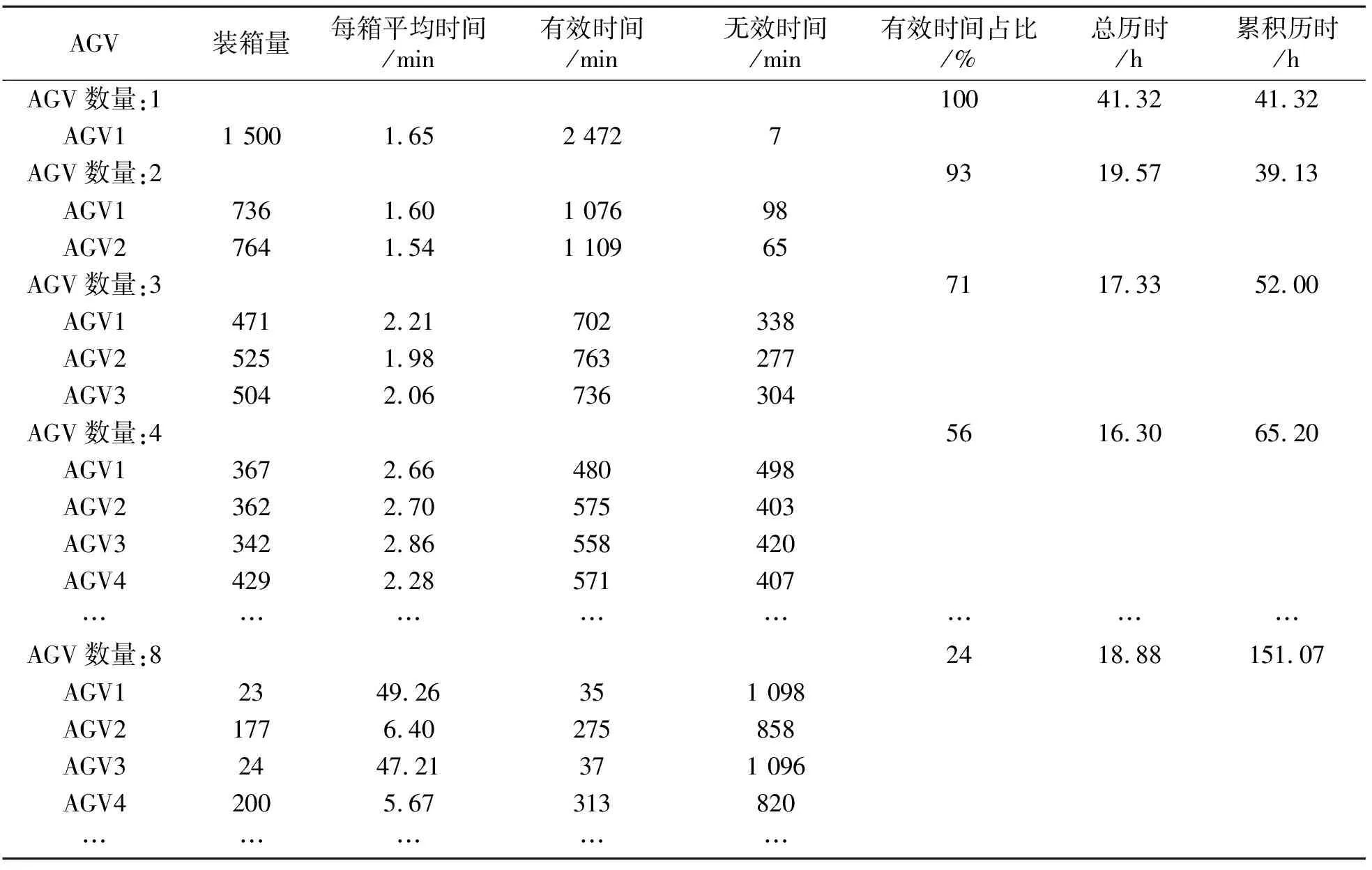
表1 AGV运输数据
表1中,有效时间为AGV处于行驶中的时间;无效时间为AGV在停车场中的时间;总历时为该场景下,仿真总共时间;累积历时为该场景下,所有AGV总共累加起来的时间。分析表1数据可知,当AGV数量为1时,这辆AGV一直处于行驶状态,工作效率极高;当AGV数量为8时,各AGV工作效率极低。当AGV数量超过8辆时,过于饱和的AGV数量导致AGV不能及时接到运输任务而频繁进出停车场,停车时间会大大增加,并且行驶中的碰撞及等待频次也越来越高,因此总历时反而增加,如表2和图9所示。
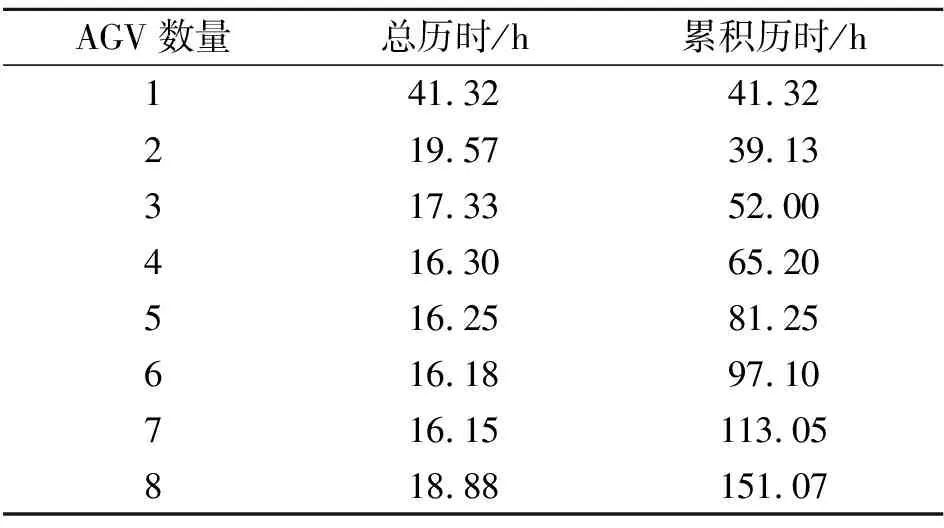
表2 AGV运输历时
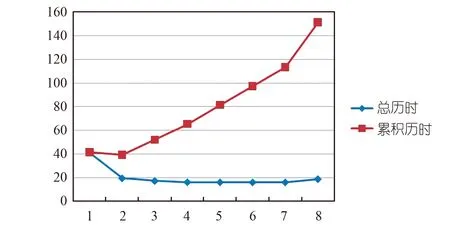
图9 AGV运输历时
从上述图表分析得出,当AGV数量大于4辆后,总历时下降趋势不明显,因此,在该场景下,AGV投入数量最优为4辆。设置4辆AGV,并选择不同的路径算法进行模拟,采集到的数据见表3。
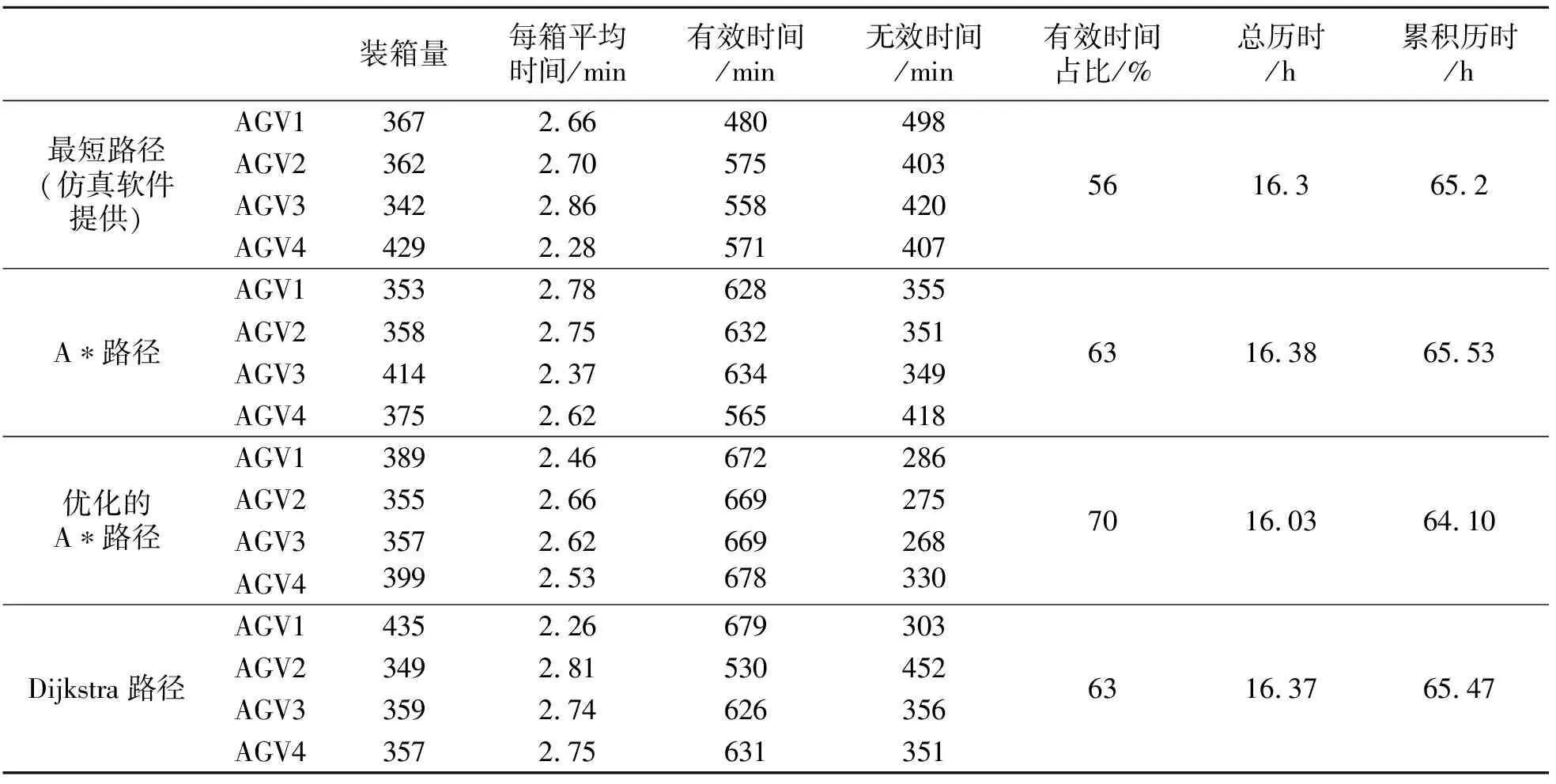
表3 不同路径下AGV运输数据
从表3数据分析得出,投入4辆AGV时,优化的A*路径有效时间占比最大,总历时、累积历时均比其他的算法短,对A*路径算法进行优化能够提高运输效率。
4 结语
通过场景规划、仿真及算法系统搭建、路径算法优化、路径冲突解决以及对仿真结果数据分析后,最终得出AGV最优数量和最优路径算法,能够为港口AGV运输交通路径及业务运行规划提供方法及数据支持。
猜你喜欢
军事文摘(2023年5期)2023-03-27
湘潭大学自然科学学报(2022年2期)2022-07-28
环球时报(2022-04-16)2022-04-16
井冈教育(2020年6期)2020-12-14
现代装饰(2019年7期)2019-07-25
电子测试(2018年15期)2018-09-26
中国公路(2017年8期)2017-07-21
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
专用汽车(2015年2期)2015-03-01