昆明CORS加密基准站的质量评价
2023-11-02 12:13王晶朱大明倪曙王友昆刘晨
城市勘测 2023年5期
王晶,朱大明,倪曙,王友昆,,刘晨
(1.昆明理工大学国土资源工程学院,云南 昆明 650093; 2.昆明市测绘研究院,云南 昆明 650051;3.武汉大学测绘学院,湖北 武汉 430079)
0 引 言
全球导航卫星系统(Global Navigation Satelite System,GNSS)是国家信息体系的重要空间基础设施,已经影响到人类科技和生活的方方面面。其主要包括美国的全球卫星导航定位系统GPS(Global Position System,GPS)、中国的BDS北斗导航定位系统(BeiDou Navigation Satellite System,BDS)、俄罗斯的GLONASS卫星导航定位系统(Global Navigation Satellite System,GLONASS)以及欧洲的GALILEO卫星导航定位系统(Galileo Satellite Navigation System,GALILEO)[1]。随着测绘科学技术的发展,GNSS基准站网的建设规模越来越大,其能将定位精度提高到毫米级,目前不同尺度的连续运行基准站网被建立,如大尺度的全球跟踪站网(International GNSS Service,IGS)、中尺度的国家级或省市参考站网如:美国连续运行参考站网(Continuously Operating Reference System,CORS)、中国大陆构造环境监测网络(The Crustal Movement Observation Network of China)、云南省CORS网(YNCORS)、广东省CORS网(GDCORS)、浙江省CORS网(ZJCORS)等,小尺度的各种桥梁、隧道、大坝工程基准网。这些不同尺度的GNSS连续运行基准站网为研究全球板块运动、地壳形变监测以及桥梁隧道等重大工程监测的研究提供了强有力的技术支撑,因此基准站网的可靠性显得尤为重要,目前从观测数据的质量的可靠性和基准站的稳定性对基准站进行评价是检核不同尺度的CORS站能否成为可靠的空间基准的有效方法。
1 基准站的质量评价
1.1 观测数据质量的评价指标
数据质量的评价参考了BD 420022—2019《北斗/全球卫星导航系统(GNSS)测量型接收机观测数据质量评估办法》[2]采用了以下5个评价指标,即数据完整率,MP1(第一频率的多路径误差),MP2(第二频率的多路径误差),SN1(L1载波上的信噪比),SN2(L2载波上的信噪比)和周跳比。
(1)数据完整率
数据完整率是定义GNSS接收机接收的观测历元同理论观测历元的比值,其能够反映接收卫星信号的完整程度,计算公式如下:
(1)
上式中,α表示数据完整率,Ni和N0分别表示实际观测历元和理论观测历元的数量。该指标大于等于90%则表示接收机接收卫星信号的完整度较好。
(2)第一频率的多路径误差(MP1)
接收机工作时,除了收到直线到达的卫星信号外,还会接收到测站附近地物反射回的卫星信号,这些反射回的信号与直线到达的卫星信号产生叠加使得接收机接收到的信号产生延时效应。MP1为观测信号相对于第一频率上多路径效应的影响。MP1值愈小,接收机抗多路径效应的能力越强。MP1的计算公式如下:
(2)

(3)第二频率的多路径误差(MP2)
类似MP1,MP2则为观测信号相对于第二频率上多路径效应的影响。MP2的值愈小,接收机抗多路径效应的能力越强。MP2的计算公式如下:
(3)
式中,P2为第二频率上的伪距观测值,φ1、φ2和α与式(2)相同。MP2小于等于 0.65 m的情况下可认为抗多路径效应能力较好。
(4)信噪比(SN1,SN2)
信噪比(Signal-Noise Ratio,SNR)是指接收机所接收信号的信号功率与噪声功率之比,其反映GNSS系统测距信号质量的优劣,是判别GNSS系统稳定性的重要指标。观测信号不同的传输频率对应着不同载波的信噪比。L1、L2载波上的信噪比分别为SN1、SN2,其值愈大,证明观测信号的质量越好。SN1、SN2的计算公式如下:
(4)
上式中,S1、N1分别指GPS系统在L1载波上的信号功率和噪声功率,S2、N2同理。通常SN1大于 4.5 dB,SN2大于 5.5 dB的情况下视为观测信号较好。
(5)周跳比
周跳(Cycle Slips)是指某个观测时段内由于卫星失锁继而引起观测信号发生整周计数跳变或中断。周跳比用来描述特定时间段内接收机观测数据的实际历元数据量与周跳历元数据量的比值,该值是反映观测数据质量的指标之一。通常使用TEQC软件来计算周跳比,以反映观测值周跳的严重程度,计算公式如下:
(5)
其中,o/slps,num_all分别表示周跳比和观测值数量,num_skip为周跳数量,由式(5)可知,o/slps越小,则周跳越明显。
1.2 基准站稳定性的评价
对于建成时间长且积累了大量观测数据的基准站,对其进行分析评价,除了对基准站的观测数据质量进行分析外还需要研究其时间序列分析[3]。精准的时间序列能够拟合出站速度和速度场成果,以便于精准研究基准站的动态变化情况。KMCORS加密站建成不久,观测数据质量有限,故本次研究只对其两期加密站的CGCS2000坐标进行对比分析。
2 KMCORS加密基准站的分析评价
昆明市连续运行基准站(Kunming Continuously Operating Reference Stations,KMCORS)[4,5]是昆明市现代测绘基准的核心组成部分,是构建现代PNT(Positioning Navigation and Timing,定位导航与授时)服务[6,7]的基础。KMCORS通过网形合理,密度恰当的基准站网维持CGCS2000(China Geodetic Coordinate System 2000,2000国家大地坐标系)坐标框架[8,9]。2021年,为进一步优化网形结构,增强服务性能,KMCORS进行了全面的升级改造,其中包括增设8个加密基准站。本研究对这8个加密基准站进行了质量评价,包括GNSS(Global Navigation Satellite System,全球导航卫星系统)观测数据质量测试和点位稳定性评估。
2.1 数据收集
为满足加密站质量评估的需求,本研究采集了KMCORS中的14个基准站(包括6个原基准站和全部8个加密站)的两期GNSS观测数据。其中,第一期为2021年10月1日至7日(对应DOY(Day-of-Year,年积日)274-280,2021),第二期为2022年3月1日至7日(DOY 60-66,2021)。另需说明的是,测站位置和代号为保密数据,在此恕不展示。
2.2 数据规整
由于收集到的观测数据版本不统一,且有效的卫星系统涵盖了GPS系统、GLONASS系统、Galileo系统以及中国的BDS系统,鉴于GAMIT解算的需要,需要统一观测数据的卫星系统、版本以及采样率。目前GPS系统是全球最稳定的卫星导航系统,主流的高精度GNSS解算软件GAMIT处理GPS系统观测数据的效果最佳,经过大量实践证明,30 s的采样间隔,2 880个历元的观测数据,解算可以得到效果较优的单日解。故本研究将采用GFZRNX软件将所收集到的数据规整为GPS系统,30 s采样间隔,2 880个历元。
2.3 观测数据质量测试
采用TEQC软件[10]对上节采集到的观测数据进行质量测试,测试指标为:数据完整率,MP1,MP2,SN1,SN2和周跳比。图1~图6即为质量测试结果。另需注意的是,由于篇幅原因,故在此仅展示随机挑选的5个加密站的测试结果。

图1 KMCORS加密基准站的数据完整率
图1表明KMCORS加密站的数据完整率均在97%以上,远超90%(限差,下同);图2和图3则表明加密站的SN1均大于 4.5 dB,SN2均大于 5.5 dB;图4和图5可见各站的MP1都低于 0.5 m,MP2都低于 0.55 m;图6则显示各测站的周跳比均大于200。综上,加密站GNSS数据的各项指标均满足要求,证明其运行稳定,观测条件良好,可为CORS中心实时传输可靠的GNSS观测数据。

图2 KMCORS加密基准站的SN1

图3 KMCORS加密基准站的SN2

图4 KMCORS加密基准站的MP1
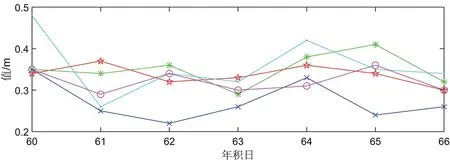
图5 KMCORS加密基准站的MP2
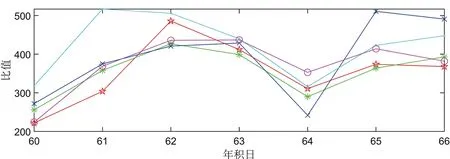
图6 KMCORS加密基准站的周跳比
3 点位稳定性分析
3.1 基线解算
采用GAMIT/GLOBK软件(v10.71)[11-13]对第1节所示的两期观测数据分别组网进行基线解算,具体解算策略如表1所示:

表1 基线解算策略
基线解算完毕后,须进行基线解质量检核。NRMS(Normalized Root Mean Square,归一化均方根)NRMS是衡量基线解质量的重要指标,理想状态下该值应该小于0.2,可由下式计算:
(6)

基线重复率能够反映基线解的内部精度,是衡量基线解质量的重要指标之一,其公式如下:
(7)
整网基线重复率通常采用固定误差和比例误差表示,即:
σi=ai+biL
(8)
式中,σi表示观测网各方向分量的中误差,ai,bi分别表示各方向分量的固定误差和相对误差,L为各基线分量的长度。参考《卫星定位城市测量技术标准》(CJJ/T 73—2019)[14],a应小于 5 mm,b应小于 1 ppm,经计算,本项目所得基线求得的a为 1.51 mm,b为 0.32 ppm,满足限差要求。综上,NRMS和a,b均表明:基线解质量可靠,可用于下一步平差处理。
3.2 平差策略
本研究的选用CGCS2000坐标框架,固定已知点的CGCS2000坐标以传递所有待测点的坐标成果。平差所用策略如下:首先,固定1个原基准站的XYZ坐标进行无约束平差;而后,评估其余5个原基准站的坐标成果与已知成果的差异,若XYZ三方向均小于 5 mm,则将其纳入已知点进行二次(约束)平差,否则予以作为待求点;最后,固定所有稳定点,确定8个加密站的CGCS2000坐标。根据上述策略,分别确定8个加密站的两期坐标成果。
3.3 稳定性分析
通过两期坐标成果作差,即可判断加密站是否稳定。根据GNSS定位的误差,在此规定:若三方向较差均小于 1 cm,才可确定点位稳定。如表2所示,所有加密站的三方向较差,即△X,△Y和△Z均小于 1 cm,表明各加密站自投入运行以来,位置稳定,未发生偏移,其初期坐标成果可靠,无须更新。

表2 加密站的两期坐标成果较差
4 结 论
本次研究利用了KMCORS加密站2021年年积日为274~280和2022年年积日为060~066的两期观测数据,从数据完整率、MP1、MP2、SN1,SN2、周跳比等方面进行了数据质量分析,再将两期基准站在CGCS2000框架下的坐标进行对比,得出以下结论:
(1) KMCORS加密站的GNSS观测数据的数据完整率均在97%以上;且各加密站的SN1均大于 4.5 dB,SN2均大于 5.5 dB;各站的MP1都低于 0.5 m,MP2都低于 0.55 m;各站的周跳比均大于200。综上说明加密站接收环境较好,观测信号平稳,可为CORS中心实时传输可靠的GNSS观测数据。
(2) 加密站的两期坐标成果较差低于限差,证明加密站的位置稳定,其坐标成果短期内无须更新能够作为可靠的空间基准为授权用户提供服务。
猜你喜欢
测绘学报(2022年5期)2022-05-31
北京航空航天大学学报(2021年9期)2021-11-02
高技术通讯(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
中国惯性技术学报(2020年2期)2020-07-24
中国交通信息化(2019年2期)2019-03-25
舰船电子对抗(2016年5期)2016-12-13
中国交通信息化(2015年10期)2015-06-06