遥感影像融合下自然资源地类特征提取仿真
2023-10-29 01:46蒙友波廖艳梅王晓红
计算机仿真 2023年9期
蒙友波,廖艳梅,覃 锋,王晓红
(1. 贵州省自然资源勘测规划研究院,贵州 贵阳 550000;2. 贵州理工学院矿业工程学院,贵州 贵阳 550003;3. 贵州大学林学院,贵州 贵阳 550025)
1 引言
在我国第三次国土调查时,国家有关部门围绕“两统一”原则,提出了2021年度的地理国情监测[1]方案,并依据该方案给国家自然资源进行了细致的监测分析,建立了完整的遥感数据库,以便后续的监察研究。遥感技术[2]依靠其自身覆盖范围广、数据信息客观以及实时性高的特性,受到各个国家的喜爱。随着我国国民经济水平的稳步提升,国家对于自然资源的保护愈加注重。自然资源地类特征提取作为其中重要组成部分,提出合理有效的特征提取方法是该领域亟待解决的问题。
文献[3]提出基于非规则标识点过程的遥感图像零星地物目标几何特征提取。该方法首先使用非规则标识点建立目标几何函数,确定目标位置;再通过高斯分布的散度定义法提取目标提取函数,使用最大化概率分布准则算法获取目标提取结果;最后通过提取结果实现特征提取。该方法未能对图像进行融合处理,导致识别正确率低。文献[4]提出高分辨率遥感影像建筑区域局部几何特征提取方法。该方法通过对影像的多尺度变换,获取图像的奇异性特征;通过张量投票理论对图像进行二阶张量对称处理,用概率密度估计算法生成全局概率密度场,最后通过最大类间方差法完成阈值分割,实现特征提取。该方法在进行张量对称时存在问题,所以该方法进行特征提取时的查全率低。文献[5]提出面向高光谱影像分类的显著性特征提取方法。该方法基于相邻波段法对图像进行分割处理;基于分割结果,获取不同图像区域的显著性特征;最后利用滑窗法对遥感图像的光谱方向进行计算,并使用支持向量机对计算结果进行分类,实现特征提取。该方法在进行光谱计算时存在误差,所以该方法的误报率高。
为解决上述特征提取方法中存在的问题,提出遥感影像融合下自然资源地类特征提取方法。
2 遥感影像融合
使用拉普拉斯法[6]对自然资源遥感图像进行融合处理。
2.1 图像分解
2.1.1 建立高斯金字塔
设定原始遥感图像为金字塔的底层图像G0,并将其进行高斯滤波[7]采样,获取金字塔第一层图像G1,以此类推构建一个自然资源遥感图像的高斯金字塔。金字塔构建过程如下式所示
(1)
式中,金字塔顶层标记成n,层数为l,常数分别为i和j。由此建立高斯金字塔G={G0,G1,…,GN}。
2.1.2 建立拉普拉斯金字塔


(2)
(3)
式中,第l层的拉普拉斯分解图像为LPl,金字塔顶层层数标记为N,顶层分解图像标记为LPn。
依据上述可知,在建立的金字塔中,每一层获取的遥感图像都是通过内插放大获取的,所以又称该过程为图像带通滤波分解过程。
2.1.3 图像重构
基于上述约束条件,建立图像重构约束准则,实现遥感图像的重构[8],过程如下式所示
(4)
式中,金字塔顶层图像重构约束准则为GN。图像的重构过程如下式所示
(5)
式中,重构的图像为S,噪声方差标记为∂。
根据上述可知,在遥感图像重构的过程中,通过建立的拉普拉斯金字塔由顶层逐级向下递推,从而完成自然资源遥感图像的重构。
2.2 图像融合
由于拉普拉斯金字塔分解的遥感图像处于不同空间频带上,所以遥感图像在融合时也要依据频带的不同,分频带进行图像融合[9],从而突出特定频带细节特征。
设定原始遥感图像A、B在拉普拉斯分解后的第l层图像为LAl和LBl,融合后金字塔顶层原始图像分别标记成LAN和LBN,像素的中心区域为M×N,通过计算获取大小该区域的平均梯度,过程如下式所示

(6)
式中,在x、y两个方向上的一阶差分[10]标记成ΔIx和ΔIy,二者的描述过程如下式所示

(7)
式中,遥感图像像素标记为f(x,y)。
根据上述可知,通过金字塔顶层中LAN(i,j)与LBN(i,j)中各个像素的计算,可获取相应的图像像素平均梯度值。
将获取的平均梯度值[11]设定为GA(i,j)和GB(i,j)形式,通过下式完成顶层图像的融合,结果如下式所示:

(8)
式中,融合后的图像标记为LFN。当0≤l≤n时,通过分解后的第l层图像,计算各区域像素能量,过程如下式所示
(9)
式中,融合函数标记为ϖ(p,q),函数中的融合向量为p和q,原始图像A、B的融合结果分别为ARE和BRE。最后通过下式完成自然资源遥感图像各层级的融合
0≤l≤N
(10)
式中,获取的金字塔各层融合图像标记为{LF1,LF2,…LFN},原始自然资源遥感图像最终的融合结果标记为LFl(i,j)。
3 特征提取
3.1 小波变换
建立一个基本函数并将其标记成ψ(t)∈L2R形式,设定傅立叶变换值[12]为ψ(ω),且二者需要满足下式
(11)
式中,母小波标记为ψ(t),变换系数标记为ω。对母小波进行平移伸缩处理,过程如下式所示

(12)
式中,伸缩因子用a标记,平移因子标记为τ,小波基函数标记为ψa,τ(t)。
将小波变换函数设定成f(t)形式,变换过程中,由于a和τ为连续变量,因此要通过计算获取图像的等价频域,并基于获取的等价频域,完成对图像信号的恢复,过程如下式所示
(13)
式中,变换系数分别为WTf(a,τ)和WTx(a,τ),频域为F(ω)。依据上述结果对融合后的图像进行小波变换,恢复图像中的像素分量。
3.2 图像聚类
通过聚类算法[13]计算图像的流形距离,将聚类样本设定成X={X1,X2,…,XN}⊂RN×q形式,特征类别标记为c,聚类矩阵为U=[uik]c×n,隶属度标记为uik形式,建立的目标函数如下式所示

(14)

3.3 选取滤波器
由于遥感图像的多维特性,需要将原始滤波器组中的各项参数进行更新确定,设定滤波噪声为σ,滤波器[14]方向角标记θ,中心偏移量为φ。由于滤波器中参数较多,所以要根据适当的方法对滤波器参数进行设定,若滤波器频率带宽标记成B=1,根据径向中心频率的方向角数量,确定滤波器参数。基于上述设定的滤波参数获取滤波公式过程如下式所示
Fg(x,y)=gf,θ(x,y)⊗I(x,y)=

(15)
式中,特定区域纹理特征为Fg(x,y),滤波系数标记为g。因为降维后的图像高光谱数据值较大,所以需要对遥感图像进行分块,并通过图像的分类运算获取图像能量信息,过程如下式所示

(16)
式中,遥感图像中第u行第v列的特定图像分块用ROI(u,v)表示,图像能量信息用E(u,v)标记,设定滤波器个数为k。
3.4 提取算法
使用等距映射方法对遥感影像的样本维数进行降维处理,从而降低迭代次数,再通过FCM聚类算法进行计算,实现特征提取。首先基于遥感影像建立目标函数,过程如下

(17)
式中,遥感图像数据样本xj的低维映射标记为φ(xj),图像数据的聚类中心标记为pi,模糊加权指数用m标记。最后使用拉格朗日乘子[15]对目标函数进行优化,获取自然资源地类特征的提取。过程如下式所示
(18)
式中,遥感影像的聚类中心标记为pk。
4 实验
为了验证上述特征提取方法的整体有效性,需要对此方法进行测试。
4.1 实验结果及分析
分别采用遥感影像融合下自然资源地类特征提取方法(方法1)、基于非规则标识点过程的遥感图像零星地物目标几何特征提取(方法2)、面向高光谱影像分类的显著性特征提取方法(方法3)进行测试;
在对自然资源遥感影像进行地类特征提取过程中,平均正确识别率、平均查全率以及平均误报率的高低都会对特征提取性能带来影响。所以基于上述的三种特征提取方法,将上述三种指标分为三个阶段,测试不同特征提取方法的提取效果。
1)第一阶段,随机选定1000张图像,将其分为两个小组,设定1组为无噪声图像,2组为有噪声图像。采用方法1、方法2以及方法3进行特征提取时,测试三种方法的平均正确识别率,测试结果如图1所示。
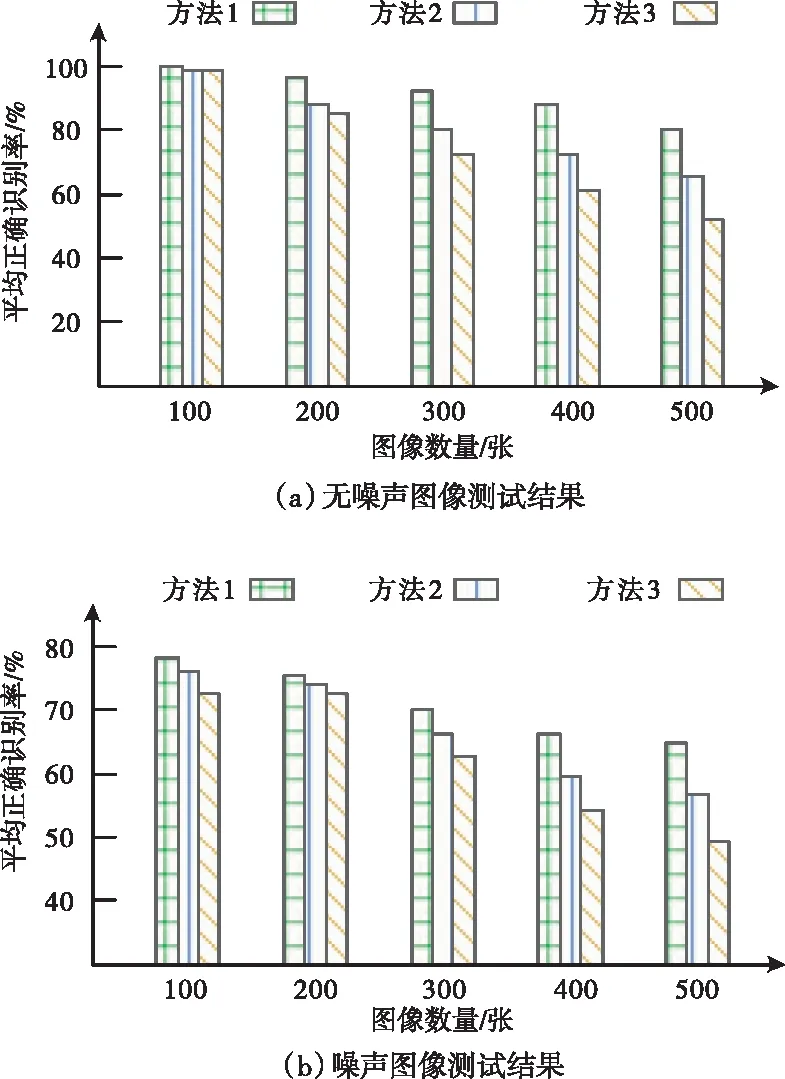
图1 不同特征提取方法的正确识别率测试结果
当图像数量不断增加时,三种特征提取方法的平均正确识别率都出现了不同程度的下降。由于图1(b)为有噪声图像,所以对比图1(a)来看,检测出的正确识别率要低于无噪声图像的检测结果。在图1(a)中,当图像数量为100时,三种特征提取方法检测出的正确识别率无较大差距,且方法2与方法3的检测结果一致,随着测试的进行,三种方法逐渐拉开差距。由此可知,本文所提方法无论在噪声图像中还是无噪声图像中检测出的识别正确率均高于其它两种方法,方法2略低于本文所提方法,方法3的检测结果最差。
2)在第二阶段中,选定一张图像,采用方法1、方法2以及方法3进行特征提取,对三种特征提取方法的平均查全率进行测试,测试结果如图2所示。
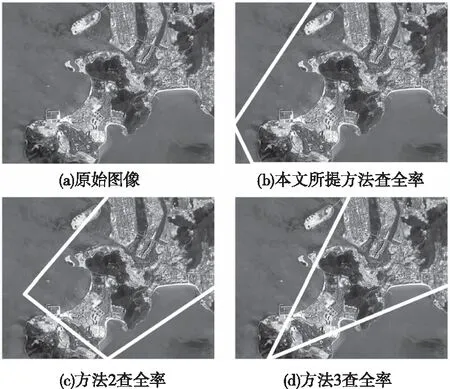
图2 不同方法的查全率测试结果
分析图2可知,本文所提方法的查全率要高于其它两种方法,方法2低于本文所提方法,方法3的检测结果较不理想。这主要是因为本文所提方法在进行图像特征提取前使用拉普拉斯法对图像进行了融合处理,所以本文所提方法在进行特征提取时的平均查全率高。
3)基于上述实验结果,开展第三阶段的测试,采用方法1、方法2以及方法3提取图像特征时,对三种方法的平均误报率进行测试,测试结果如图3所示。
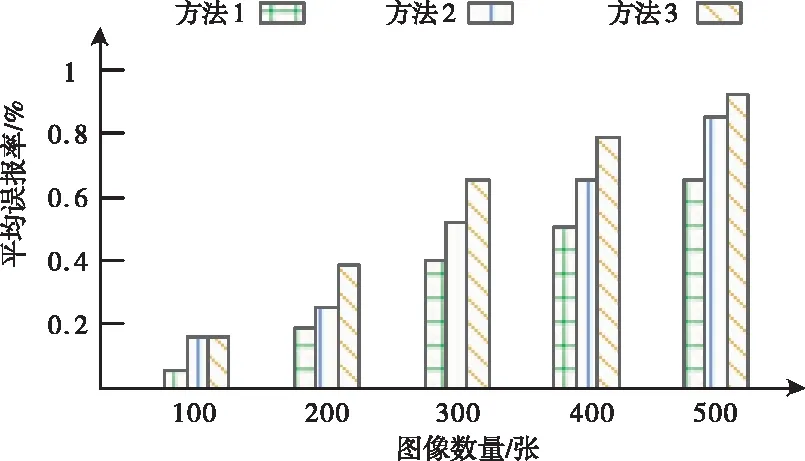
图3 不同方法的平均误报率测试结果
图像数量的多少会对误报率的检测结果带来影响,图像数量越多,误报率的检测结果越差。本文所提方法自实验初期,误报率的检测结果低于其它两种方法,并且将其维持至实验结束。虽然方法2与方法3在图像数量为100时,误报率检测结果一致,但是随着测试的进行,二者差距逐渐拉开,方法2的误报率要远低于方法3。
5 结束语
针对传统图像特征提取方法中存在的诸多问题,提出遥感影像融合下自然资源地类特征提取方法。该方法首先对遥感图像进行融合处理;再通过小波去噪恢复图像像素分量;最后通过聚类算法实现对图像的特征提取。由于该特征提取方法在进行图像像素分量恢复时,还存在一定的缺陷,今后会针对该项问题继续对该图像特征提取方法进行优化处理。
猜你喜欢
环球时报(2022-09-19)2022-09-19
湖南文理学院学报(自然科学版)(2022年2期)2022-05-06
Contemporary Social Sciences(2021年5期)2021-11-22
煤气与热力(2021年6期)2021-07-28
设备管理与维修(2020年14期)2020-08-12
少儿美术(快乐历史地理)(2019年2期)2019-06-12
电子制作(2018年19期)2018-11-14
童话世界(2017年11期)2017-05-17
自动化学报(2017年11期)2017-04-04
现代电子技术(2015年21期)2015-11-09