
面向涡扇发动机状态评估的健康因子构建方法
2023-10-25 11:38:40蔡文涛张吕凡徐诗奕董正琼周向东
湖北工业大学学报 2023年5期
蔡文涛, 张吕凡, 徐诗奕, 聂 磊, 董正琼, 周向东
(湖北工业大学机械工程学院,湖北省现代制造质量工程重点实验室, 湖北 武汉 430068)
涡扇发动机是目前大部分飞机的重要部件,其性能的好坏直接影响到飞机飞行任务的成功与否,所以必须对涡扇发动机进行故障预测与健康管理。一般情况下,涡扇发动机在其全寿命周期内要经历一系列不同的性能退化状态。为针对不同状态的发动机做出合理的维修决策方案,从而有效避免因发动机故障而引起的财产损失,构建合理有效、能够表征发动机健康状态的健康因子显得尤为重要[1-3]。
不同于温度风扇转速等状态参数,涡扇发动机的健康因子无法直接用传感器测量,必须通过数学方法,从已有信息中间接获取。数据驱动的方法无须考虑设备内部机理,直接基于隐藏在数据后面的健康状态信息和监测数据的演化规律,来进行退化特征的提取。该方法被广泛应用于综合健康因子的构建中。张孝远[4]等为实现对动力电池的健康状态评估,提取了3种不同的健康因子,并将3种健康因子输入神经网络中用于评估电池状态。李振恩[5]等提出用核主成分分析(kernel principal component analysis, KPCA),提取风电机组中高速轴承的健康因子并将其用于状态评估。胡启国[6]等利用t-SNE方法对滚动轴承的高维退化状态进行降维,将退化特征进行了融合,且与KPCA方法相比,该方法有着一定的优势。考虑到涡扇发动机工作环境复杂存在大量噪声,退化机理不一致,首先采用卡尔曼滤波对原始数据中的噪声做滤波处理,随后采用线性方法主成分分析(PCA)和非线性方法堆叠自编码器(SAE)提取能够表征发动机退化趋势的健康因子,最后在C-MPASS数据集上进行了实例验证。
1 相关工作
1.1 卡尔曼滤波
考虑到原始数据中含有大量的噪声,首先运用卡尔曼滤波去除噪声,还原真实数据。卡尔曼滤波[7]方法不要求满足原始数据和噪声都是平稳的这一前提条件,对于不同时刻的系统内部干扰和外部观测噪声,只需对二者的统计特性作出假设,即可对信号作出处理,得到平均意义上误差最小的真实信号值。其基本公式如下:
X(k)=AX(k-1)+BU(k)+W(k)
(1)
Z(k)=HX(k)+V(k)
(2)
式中:X(k)、U(k)和Z(k)分别是k时刻系统的状态、控制量和测量值;A、B和H分别为其系数矩阵;W(k)与V(k)分别是系统内部和测量过程的噪声。
根据以上两个方程,采用卡尔曼滤波方法对数据进行处理,推导出卡尔曼滤波方程:
X(k|k-1)=AX(k-1|k-1)+BU(k)
(3)
P(k|k-1)=AP(k-1|k-1)AT+Q
(4)
X(k|k)=X(k|k-1)+Kg(k)(Z(k)-HX(k|k-1))
(5)
Kg(k)=P(k|k-1)HT/HP(k|k-1)HT+R)
(6)
P(k|k)=(I-Kg(k)H)P(k|k-1)
(7)
式中:X(k|k-1)和X(k-1|k-1)分别是上一状态预测的结果和上一状态的最优结果;P(k|k-1)和(k-1|k-1)分别是X(k|k-1)对应的协方差和X(k-1|k-1)对应的协方差;Q和R分别是系统和测量过程的噪声方差;Kg为卡尔曼增益;I为1矩阵。
1.2 主成分分析
主成分分析法[8]是一种重要的数据降维与分析评价方法,其目的是用较少的变量去解释原始高维变量中的信息。它通过线性变换,将数据换到一个新的坐标系中,使得所有数据的方差投影在不同的坐标系中。其具体分析步骤如下。
1)对原始数据标准化处理。假设主成分分析有m个指标变量{x1,x2, … ,xm},评价对象为n,第i个评价对象的第j个指标为xij。将各指标值化为标准化的值:
(8)
其中:
(j=1,2,…,m)

2)计算相关系数矩阵R。相关系数矩阵R=(rij)m×m,其中
(9)
式中:rii=1;rij=rji,rij是第i个指标与第j个指标的相关系数。
3)计算特征值和特征向量。特征值由大到小排序,计算相关系数矩阵R的特征值λ1≥λ2≥…≥λm≥0,及对应的特征向量u1,u2,…,um,其中uj=(u1j,u2j,…,unj)T,由特征向量组成m个新的指标变量。
(10)
式中:y1是第一主成分,y2是第二主成分,…,ym是第m主成分。
4)选取p(p≤m)个主成分,计算综合评价值。第j个特征值的信息贡献率和前p个特征的累计贡献率分别为:
(11)
其中:bj为主成分yj的信息贡献率,ap为前p个变量的累计贡献率。
1.3 堆叠自编码网络
自编码网络[9]是一种无监督学习方法,能用较低维度表示输入的数据。由输入数据到低维表示的过程称为编码,再由低维表示到输出数据的过程称为解码。编码过程的输出维度一般小于输入的维度,因此自编码网络常用于高维数据的降维。其模型结构如图1所示。
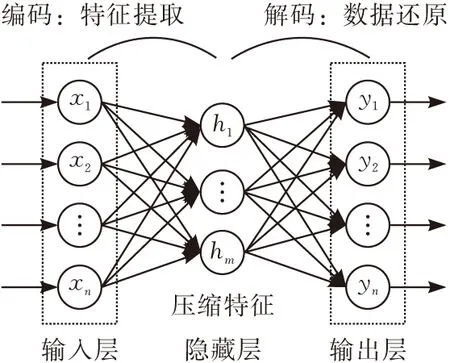
图1 自编码网络
编码器的输入记为x,则隐藏层输出为:
h=σ1(W1x+b1)
(12)
式中:σ1为编码过程的激活函数;W1为输入层与隐藏层之间的权值矩阵;b1为隐藏层的偏置;h为隐藏层激活值。解码过程为:
y=σ2(W2x+b2)
(13)
式中,σ2为解码过程的激活函数;W2为隐藏层与输出层之间的权值矩阵;b2为输出层的偏置;y为输入的重构。
自编码器的参数更新过程如下:
(14)
式中:J(x,y)为重构误差,a为学习率。
本文构造的堆叠自编码器由多个自编码器栈式堆叠而成,由一个编码器隐藏层的输出作为下一个编码器隐藏层的输入。在模型训练的过程中,输入值为原始数据,同时将其假想为目标输出值,以此构建监督误差来训练整个网络。其具体结构如图2所示。
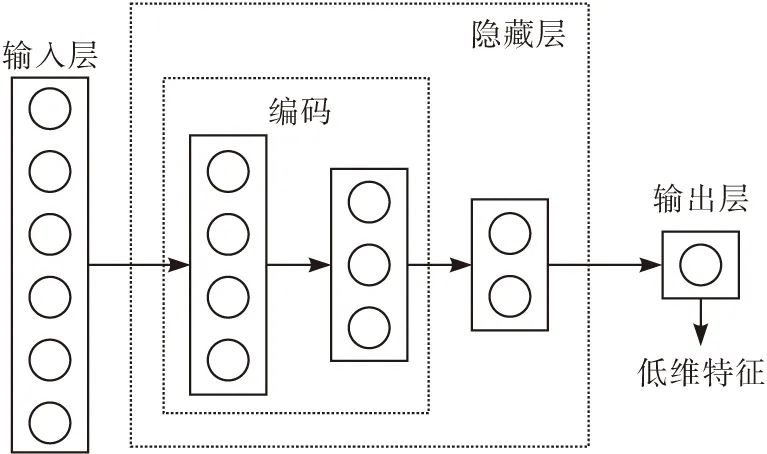
图2 堆叠自编码器
2 实例分析
2.1 数据集介绍
C-MAPSS是一个模拟大型商用涡扇发动机的工具,其模拟的发动机最大推力等级为90000 lb。该软件在MATLAB和Simulink环境中进行编码,包括一个大气模拟系统和一个电源管理系统(前者能够模拟海拔范围从海平面到12000 m高空的大气压、海平面温度为-60~103°F,后者能够保证发动机在不同飞行条件下和推力水平下运行),允许用户编辑、输入所选择的有关操作剖面、闭环控制器、环境条件等特定值。
此外,内置控制系统包括一个风扇速度控制器、调节器和限制器。其中3个高限调节器(防止发动机超过其核心转速、发动机压力比和高压涡轮(HPT)出口温度的设计限值)、限位调节器(防止高压压缩机(HPC)出口处的静压过低),以及核心速度的加速和减速限制器。该系统的综合结构类似于实际发动机控制器中使用的集成控制系统。此外,风扇速度控制器和4个限位调节器的所有数值均已提前设定,以保证飞机在不同飞行条件和功率水平下均能正常飞行。图3为涡扇发动机主要结构。
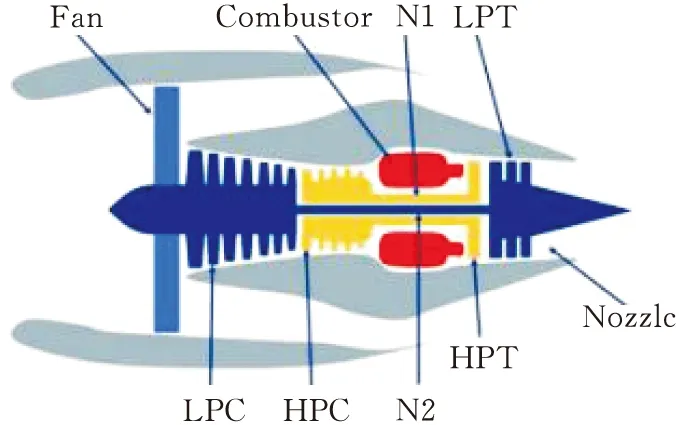
图3 涡扇发动机结构
该数据集在剩余使用寿命预测领域中被广泛采用,其中有4个子数据集(FD001—FD004)分别记录不同运行条件和故障模式下涡扇发动机从正常状态到故障状态的全寿命周期的状态监测数据。本文选取数据FD001,其中共记录了100组发动机的全寿命周期数据,21种传感器数据和3种飞行条件。训练集数据共20631条,测试集数据13096条。
2.2 结果分析
图4和5分别为LPC和HPC出口总温度随时间的延长而变化的图像。原始信号中的噪声来源于制造和装配过程噪声和测量噪声等。这些噪声源在经过卡尔曼滤波后,保留了原始信号的趋势和主体信号,很好地还原了真实信息。

图4 LPC出口总温度
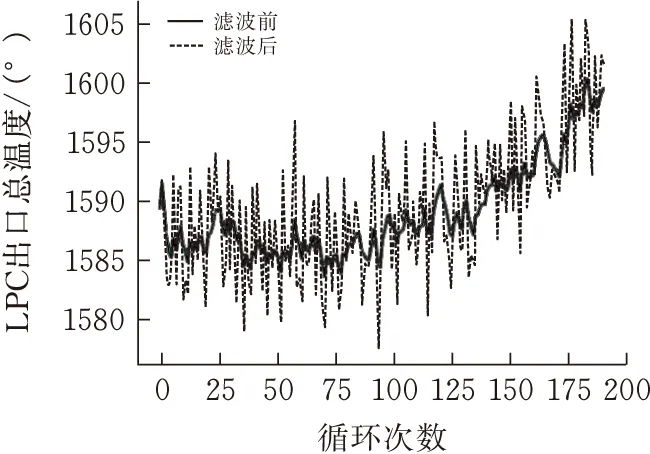
图5 HPC出口总温度
在对原始数据进行降噪处理后,分别采用PCA方法和SAE方法对降噪后的高维数据做了降维处理,其结果如图6和7所示。在原始信号中存在着不同趋势性的信号,即有单调向上和单调向下的信号。在采用PCA方法对原始信号降维后,得到的健康因子趋势向上;经过SAE方法处理的原始数据,得到的健康因子趋势单调向下。二者均得到了较为合理的健康因子。其中,通过PCA方法得到的健康因子为线性方法所求,SAE方法所得健康因子为非线性方法所求,在对涡扇发动机健康状态进行评估时,均可作为评估的输入。相比于PCA方法,SAE方法降维后的数据不仅能够实现数据维度上的降低,还能保证降维后的数据具有原数据的空间结构,能够更加完整地保留原始数据中的信息。
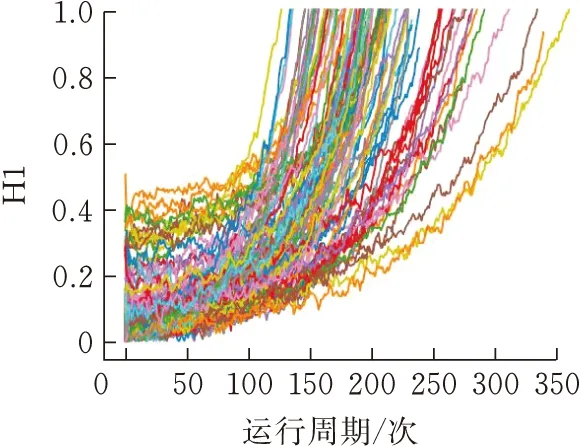
图6 PCA方法结果

图7 SAE方法结果
3 结论
在面向涡扇发动机的健康状态评估过程中,由于原始数据中含有大量噪声和监测数据维度高的问题,导致了提取表征发动机退化趋势的健康因子较为困难。本文首先通过卡尔曼滤波对原始数据做信号处理,有效地滤去了原始传感器信号中的噪声。随后,分别利用PCA方法和SAE方法对滤波后的数据做降维处理,分别得到了线性方法和非线性方法求得的一维健康因子。考虑到飞行时不同发动机内部退化机理不一致,以上两种方法均可用于涡扇发动机的状态评估,以满足不同状态下涡扇发动机的健康评估。本文方法已在具体工程实践中得到应用。此外,以上两种方法针对的是多特征量的数据降维,可以用于同类型数据结构的其他发动机产品健康因子的提取。
猜你喜欢
China Report Asean(2022年8期)2022-09-02 05:31:26
车主之友(2022年4期)2022-08-27 00:57:12
物联网技术(2020年12期)2021-01-27 03:34:08
海峡姐妹(2019年12期)2020-01-14 03:24:40
汽车零部件(2017年4期)2017-07-12 17:05:53
北京航空航天大学学报(2016年12期)2016-02-27 06:32:33
计算物理(2014年1期)2014-03-11 17:00:18
燕山大学学报(2014年1期)2014-03-11 15:28:11
中国石油石化(2013年5期)2013-05-03 02:17:34
燃气涡轮试验与研究(2011年1期)2011-04-16 03:54:28
