
介电弹性体驱动器在柔性机器人中的研究进展
2023-10-25 10:59俞红锂
中国塑料 2023年10期
俞红锂,刘 茜
(上海工程技术大学纺织服装学院,上海 201620)
0 前言
近些年来,机器人在工业生产和日常生活中承担着越来越多的工作任务。传统机器人主要由硬质材料组成,虽然可以执行人类难以完成的机械动作,如自动化生产线和搬运重物等,但这也限制了其适应性,难以满足更多场景中的应用需求。与传统机器人相比,柔性机器人是一种由柔性材料组成的能够执行精细和灵活任务的机器人,具有良好的柔韧性和灵活性,并且在一些特定的环境中,拥有传统机器人所不具备的优势,例如可以避免碰撞受损、适应不同的形状和表面、具有高的生产效率和可操作性等。柔性机器人在医疗、制造业、物流等领域已有广泛的应用。其中,介电弹性体(DE)被称为电致伸缩聚合物,其特点是受到外部电场的作用,能够产生形状和体积的变化,具有电致变形大、响应速度快、能量密度高、机电转换效率高、质量轻和成本低等优点[1],使其成为驱动柔性机器人的一种理想选择[2]。
本文基于现有研究基础,结合国内外相关文献专利,介绍目前主要用于介电弹性体驱动器应用的不同种类的DE材料特点,总结国内外介电弹性体驱动器的不同构型研究进展,详细阐述介电弹性体驱动器在柔性机器人领域中的应用进展。
1 介电弹性体驱动器简介
1.1 介电弹性体种类
DE 材料对介电弹性体驱动器(DEA)的性能有着至关重要的影响,为了获得更好的性能,要求DE 材料同时具备低模量、低黏度、高击穿强度、高介电常数和低介电损耗的优点。在过去的研究中,对各种DE材料进行了研究,包括丙烯酸酯、硅橡胶和聚氨酯。
丙烯酸酯类弹性体由脂肪族丙烯酸酯的混合物制成,其弹性主要依靠柔性支链的脂肪族基团和丙烯酸聚合物链的轻度交联。丙烯酸酯弹性体在预拉伸条件下,因其在驱动变形方面具有良好的表现,成为应用最为广泛的介电弹性体之一。其中,市售的3M 公司生产的VHB 系列胶带最具代表性,据报道,经过高强度预拉伸的应变可以超过380 %,并且其理论能量密度可以达到3.4 MJ/m3[3]。然而,丙烯酸酯弹性体具有较大的黏弹性,导致其反应速度慢,并且长期松弛影响其工作寿命[4]。
硅橡胶化学名称为聚硅氧烷,是一种半无机类聚合物,由Si—O 键和2 个烃基作为基本单位,聚合形成长链,应用最为广泛的硅橡胶为聚二甲基硅氧烷(PDMS)。硅橡胶弹性体具有比丙烯酸酯弹性体更低的黏弹性,因此,在低预应变或无预应变的情况下,硅橡胶弹性体表现出优异的电致应变,并且可以在较宽的温度范围内操作,从而使其更适合温度变化较大的应用[5]。
聚氨酯是一种主链含有—NHCOO—重复结构单元的聚合物,包括硬质聚氨酯塑料、软质聚氨酯塑料、聚氨酯弹性体和其他形式。其中,聚氨酯弹性体是一种介于普通橡胶和硬塑料之间的高分子聚合物,它是由二异氰酸酯、多种醇类和不同硫化剂组成的典型嵌段共聚物。由于其含有大量的极性官能团,因此具有高极性,从而具有较高的介电常数,可以承受更大的电压驱动。然而,聚氨酯的模量较大,产生大应变的能力有限[6]。
1.2 介电弹性体驱动器构型
DE 是高度可变形和不可压缩的介电弹性体材料,当在其两侧涂覆柔性电极时,DE 形成一个可变电容器,可以将静电能转化为机械功。具体而言,在外部电场作用下,两侧电极上的相对电荷之间的静电吸引会产生一种称为麦克斯韦应力的应力,导致薄膜厚度方向上收缩,面积上膨胀,其驱动原理如图1所示。

图1 DEA驱动原理图Fig.1 Working principle of DEA
自20 世纪90 年代以来,为了提高DEA 的电致变形效果和响应速度,国内外研究者们根据工作原理不断地设计出许多不同构型的DEA,如卷轴型、堆叠型、折叠型、锥型、扑翼型等[7]。
简单构型的DEA 是在膜的两面涂覆柔性电极,利用平面或厚度方向的变形实现线性位移。然而,单层膜在厚度方向上的变形太小,因此,在实际应用过程中需要采用串联的形式将多层DE 通过堆叠的方式开发多层DEA 以提高输出力。Hau 等[8]采用堆叠的形式制备了结构紧凑的多层DEA[图2(a)],在90 V/μm 的电场环境下,能够产生大约100 N的力,冲程大约在3 mm,提高了驱动装置的增压性能,使其可以适用于特定的应用,如高压阀。

图2 典型DEA结构[8-10]Fig.2 Typical DEA structures[8-10]
锥型DEA 是将DE 膜固定在刚性框架上,并受到垂直于其平面的偏置力,当膜受到电压时,表面膨胀,内部张力减小,位移沿偏置力方向发生。Wang 等[9]设计了锥型介电弹性体驱动器[图2(b)],并进行了平移和旋转双稳态DEA 的实验,证明了锥型双稳态DEA在不连续施加电压的情况下保持稳定变形是有效的。
卷轴型DEA 往往采用线性弹簧为支撑构件,将预应变的DE 薄膜卷绕在弹簧表面,当DE 薄膜在电场作用下产生电致形变导致形状改变,使弹簧产生伸长和压缩,达到驱动效果。卷轴型DEA 可以实现在较小的体积内获得多层DE 薄膜和电极,层数越多,输出的力越大。Li等[10]设计了一种具有大电致弯曲角度的弹簧卷轴型驱动器[图2(c)],并研究其在柔性抓取器和柔性爬行机器人中的应用潜力。
现阶段,DEA 的研究重点主要集中在提高其效率、响应速度和稳定性等方面,以满足不同应用领域的需求。此外,学者们还在探索新型材料、多场耦合效应和智能控制等方面的研究,以推动DEA的发展。
2 介电弹性体驱动器在柔性机器人中的应用
如今,DEA 常常被应用于柔性机器人的关节驱动和柔性传感器中,并且通过与其他材料组成机械结构,可以实现更加精细和多样化的机械操作[11]。基于DEA 的各种配置,研究者们不断研究,已设计并开发了许多不同种类的柔性机器人,包括柔性抓取机器人、行走/爬行机器人、跳跃/飞行机器人、游泳机器人、仿人机器人、可穿戴设备等[12]。
2.1 柔性抓取器
柔性抓取器可以很容易地适应物体的不平表面,从而能够高效而精细地抓取具有未知几何形状、体积和质量的多个物体。早期的柔性抓取器往往是基于介电弹性体最小能量结构(DEMES)制备的。DEMES是将预拉伸的DE膜附着在柔性不可拉伸的框架上,通过控制电压改变其弯曲状态。当松弛时,结构会弯曲,直到预拉伸薄膜上的张力和框架的弯矩达到平衡,从而形成类似夹具的形状。Kofod 等[13]利用DEMES 开发了三指结构的柔性抓取器[图3(a)]。预拉伸的弹性体与弹性框架相结合,收缩的弹性体释放的能量被部分地储存为框架中的弯曲能量,当施加电压时,DE 的变形率增加,结构的弯曲能量减小,三指逐渐打开包裹物体,当电压关闭时,DE 的变形率减少,结构逐渐恢复弯曲,三指弯曲夹住物体,实现抓取效果。随着不断的研究,多段式结构的DEMES 具有更多的自由度,可以实现抓取不同大小和形状的物体。例如,Araromi等[14]提出了一种多段DEMES 的设计概念,使用多个重复的节段制备驱动臂,随后将4 个驱动臂呈十字形配置,确保抓取器能够夹持不同大小和形状的物体[图3(b)]。此外,Lau 等[15]设计了一种基于多段式DEMES的抓取器,每个DEA 段都位于柔性框架边上的窗口中,DEA 初始弯曲近乎90°[图3(c)],从而放大了张力诱导的力矩,比平坦的DEA 高40 倍,结果显示其可以抓取自身质量8~9倍的物体。
然而,由于DEA的柔软性,存在有效载荷容量低的问题。为了克服这一问题,提出了复合驱动的方法来提高抓握能力。例如,在DE材料中加入刚性纤维或其他智能材料,通过调整纤维的排列,柔性夹持器可以产生包裹或弯曲动作,以夹持不同形状的物体。Shian 等[16]在DE 中加入少量的刚性纤维来引导DE 的弯曲方向,并且在变形中充当几何铰链,实现更多的抓取动作和角度[图3(d)]。Shintake 等[17]设计了一种刚度可变的柔性抓取器[图3(e)]。该装置是将低熔点合金(LMPA)嵌入至DEA,通过焦耳加热将LMPA 从刚性状态切换成柔性状态,实现刚度可控,最大驱动角度可达23.7°。Aksoy 等[18]将DEA 与形状记忆聚合物(SMPs)纤维和可拉伸加热器排列组合而成[图3(f)]。通过选择性焦耳加热可以改变SMPs纤维的局部硬度,DEA可以沿着软轴弯曲,实现抓取器变形多样化。这种可变刚度的特性将进一步扩展柔性抓取器的适用性。

图3 基于DEA的柔性抓取器[13-20]Fig.3 DEA-based flexible grippers[13-20]
除了上述直接由DEA 制成的柔性抓取器外,研究人员还结合其他技术制造了DEA 驱动的柔性抓取器,受到气动驱动器大变形和高输出力的启发,也被广泛应用于柔性机器人的设计。Zhang 等[19]制备了一种基于DEA 的柔性液压抓取器。球状的DEA 被用作液压源,夹手最大弯曲角度可达到23°,为水下抓取作业提供参考[图3(g)]。Cao 等[20]提出了一种由DEA 驱动的气动泵,并将该气动泵成功地应用到柔性抓取器中,可抓取质量为68 g的物体[图3(h)]。技术结合的方式也将为柔性抓取器提供更多的机会。
2.2 爬行/行走机器人
基于DEA 的机器人具有较高的能量转换效率和较快的响应速度,并且可以实现多样化的运动姿态,从而适应不同的地形和环境,可以在危险环境、探测任务和医疗护理等领域发挥重要作用。
在早期研究过程中,通常是将DEA 设计成足的形状,提出了基于DEA的仿生足机器人。例如,Pei等[21]开发了一种基于卷轴型DEA的六足行走机器人[图4(a)],卷轴型DEA 结合了承重、驱动和传感功能,不仅保留了线性驱动功能,还增加了弯曲功能。实验结果显示该行走机器人可以达到每秒2/3 自身长度的最大移动速度。Nguyen 等[22]提出了另一种多自由度DEA 驱动的六足行走机器人[图4(b)],利用3 个自由度的DEA模拟腿部关节运动,在2 Hz的情况下,成功实现3 cm/s的平均行走速度。
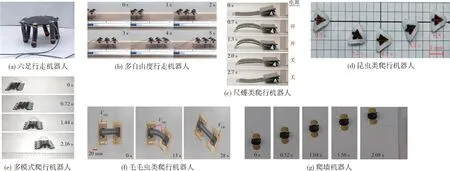
图4 基于DEA的爬行/行走机器人[21-27]Fig.4 DEA-based crawling/walking robots[21-27]
与仿生足机器人不同,另一种是受自然生物运动启发的爬行机器人,如尺蠖、毛毛虫和蛇等。Shian等[23]受到尺蠖运动的启发,开发了一种柔性爬行机器人[图4(c)]。通过在DEA 中加入排列整齐的刚性纤维,在未通电时,呈平铺状态,施加电压后,逐渐呈二维隆起趋势,实现类似尺蠖爬行的运动。同时,Li等[24]模仿昆虫开发了一款基于DEA 的柔性爬行机器人[图4(d)]。图案化的电极被涂在多层DE 膜上,形成各种独立的激活区域,通过在这些区域施加电压,可以实现快速移动和可控的转动。该机器人每秒移动距离大约是其自身长度的4 倍,并且可以在30°的斜坡上负载爬行。Hu 等[25]开发了一种多模式运动的柔性机器人[图4(e)],以DEA 为机器人主体,复制尺蠖的爬行形状。该机器人可以完成水平爬行、转弯运动和带重物的快速运动。与此同时,受到毛毛虫的启发,Guo 等[26]设计的柔性爬行机器人是将2 个自由度的DEA作为主体,柔性聚氨酯纤维用作细足[图4(f)],在0.8 Hz 的条件下,爬行速度为2.38 mm/s,弯曲速度为1.1°/s,同时可以携带一个微型摄像机在水平隧道中行走。除水平爬行的柔性机器人外,还有垂直方向的爬墙机器人。例如,Gu 等[27]提出了集成DEA 和2 个用于控制黏附的电动脚的柔性爬墙机器人[图4(g)]。其特点是可在多种垂直墙面(由木头、纸和玻璃制成)上攀爬,并且可以携带有效载荷进行多模式运动。
2.3 跳跃/飞行机器人
在崎岖和任意地形中,跳跃也是一种非常有效的运动方式。早在2004 年,有研究人员就开始设计开发跳跃机器人,Pei 等[28]利用扁平结构的DEA 开发了一种跳跃机器人[图5(a)],跳跃高度可达2 cm,大约是其自身长度的1.33 倍。Dubowsky 等[29]设计了一款基于DEA 的微型球状机器人[图5(b)],圆锥形DEA 将能量注入到一对动力弹簧,当达到一定值时,储存的机械能被释放,微型机器人实现跳跃。该机器人在实际救援场景中表现出了优异的跳跃和滚动的适应能力,证明了该微型机器人在粗糙地形中运用的可行性。Duduta 等[30]将预拉伸的DEA 和硬条制备成柔性跳跃机器人[图5(c)],利用弯曲转化为跳跃,平面和弯曲状态之间的转换时间约为22 ms,高度能达到5 cm。Luo等[31]利用多层堆叠形式,提升DEA 的输出力,提高机器人的跳跃能力,跳跃高度达到45 mm[图5(d)]。
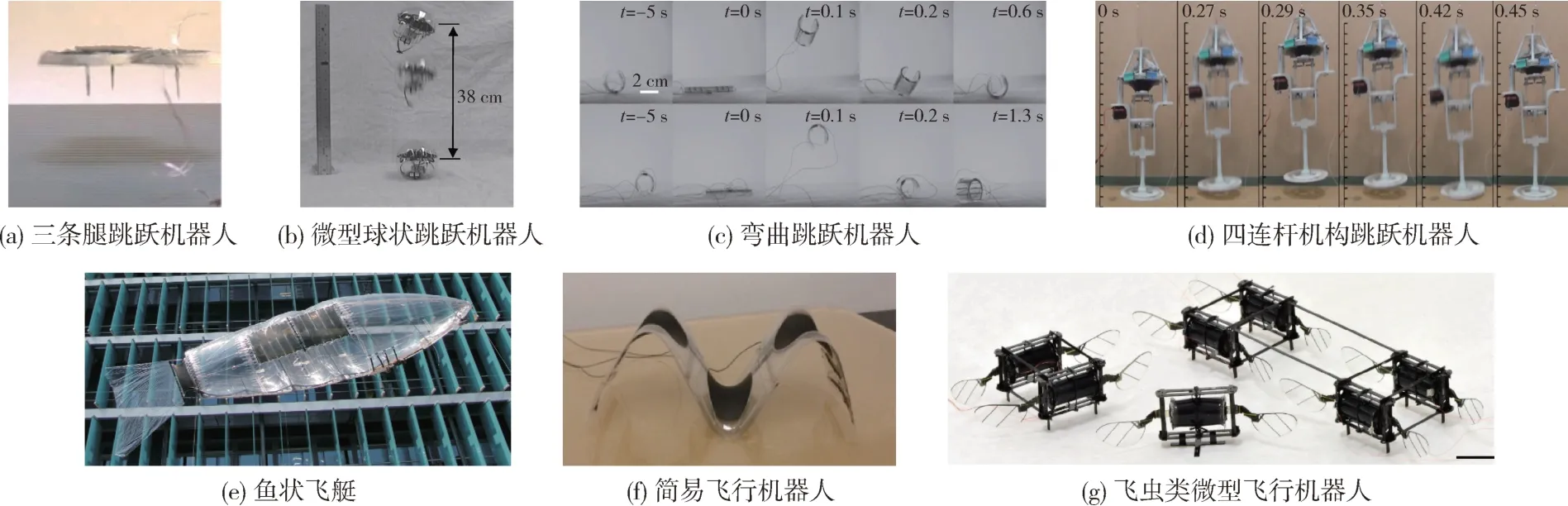
图5 基于DEA的跳跃/飞行机器人[28-35]Fig.5 DEA-based jumping/flying robots[28-35]
早期,基于仿生扑动的DEA 被应用于微型飞行器的探索。例如,Jordi 等[32]将DEA 应用于一架8 m 模型的飞艇[图5(e)],翅片和尾鳍均采用DEA 驱动,翅片与机体相连的部分由三维框架的碳棒组成,通过电压控制DEA 驱动使飞艇在空中实现推进。Zhao 等[33]提出了一种DEA 驱动旋转关节的飞行样机,整个关节采用DEMES 进行高效设计[图5(f)]。这种旋转接头具有较高的扭矩比和较大的高频角位移,每个接头都能实现60°以上的弯曲变形。近期,Chen 等[34]受到飞虫的启发,利用多层DEA 制备了一种可以真正飞行的微型机器人[图5(g)]。该飞行机器人具有空中自我感知和抗撞击能力,可以进行上升下降和悬停飞行等飞行姿态。随后,Chen等[35]继续对DEA的驱动电压和电极材料进行了优化,将优化后的DEA 集成到飞行机器人中,提升了该飞行器的飞行能力,如悬停(20 s)、高速(70 cm/s)、碰撞和空翻,姿态误差小于2°。
2.4 水下机器人
基于DEA 的水下机器人具有许多潜在的应用,如水下勘探、海洋环境监测和救援任务等。由于DEA 具有低功率、高效率和可重复使用等优点,这种设计将成为未来水下机器人主要的驱动方式之一。
早期,Godaba 等[36]开发了一种类似水母的机器人,可以实现可控的推力和浮力[图6(a)]。该机器人内部的空气室由DE膜覆盖,当施加电压时,薄膜膨胀,空气体积增加,在此过程中水从机器人身体中喷出,这可以引起推力,并作用在机器人上而使得浮力增加,机器人向上移动;当电压关闭时,机器人又会在水中下沉。与此同时,仿生机器鱼因其低噪音、低阻力、高灵活性和高隐蔽性等优点,已被广泛用于各种水下探测活动中。例如,Shintake 等[37]利用DEA 制备了一种仿鱼机器人[图6(b)],在周期性的驱动电压下,仿鱼机器人的运动速度可达8 mm/s。Jiao等[38]也提出了一种基于DEA 的仿生机器鱼[图6(c)],模拟鱼类运动时肌肉的交替收缩,结合DEA 类似于人工肌肉的特性,形成了DEA 尾鳍,最大速度能达到22.7 mm/s。此外,Tang 等[39]受到青蛙的启发,将运动过程分为推进阶段、滑翔阶段和回收阶段,利用DEA 使机器人腿的蹬踏和蹼足的面积变化同时实现,平均游泳速度达到19 mm/s[图6(d)]。

图6 基于DEA的水下机器人[36-41]Fig.6 DEA-based underwater robots[36-41]
在最近的研究中,研究者们逐渐向深海领域研究,开发了不同种类的深海机器人。例如,Li 等[40]研制了一种用于深海探测的无绳水下柔性机器人[图6(e)]。通过将电子器件集成在一个DE 基质中,使机载电源、控制和驱动装置免受压力。该机器人在马里亚纳海沟的现场测试中成功地被驱动到10 900 m 深处。同时,在中国南海3 224 m 深度以51.9 mm/s 的速度自由游动。Picardi 等[41]利用DEA 开发了一种仿生水下足式机器人[图6(f)],该机器人能在0.5~12 m 深度范围内的真实海面下进行作业,可以穿越不规则的地形和环境,安全准确地接近目标,并且可以无声地保持位置。
2.5 仿人机器人
由于DEA 具有与天然肌肉相似的驱动应变、能量密度和响应能力,因此,仿人机器人已成为一个蓬勃发展的研究领域。仿人机器人更接近人类的外貌、运动和感知能力,可以执行相对复杂的任务,也可以用于在危险的环境中执行任务。
早期,Kovacs 等[42]利用DEA 研制了扳手腕机器人[图7(a)]。将250 多个弹簧卷轴型DEA 分为2 组,计算机控制高电压放大器,电气方式激活和停用DEA,模拟人类的主动肌和拮抗肌,实现类似于手臂的双向旋转运动,可以输出与人类手臂相当的力量,显示了DEA 应用于仿人手臂的巨大潜力。后来,Lu等[43]开发了基于线性DEA 的仿生人工手臂[图7(b)],通过在DE 膜中加入适量的刚性纤维来承受较大的水平预拉伸,实现高达142 %的线性驱动应变,并在DEA 的驱动下,前臂相对于上臂可以旋转70°。Duduta 等[44]制备了一种由堆叠DEA 驱动的人工手臂[图7(c)],该DEA 由DE 材料和碳纳米管电极构成,并通过优化电极的组成和多层加工技术,制备成能够维持高的应用电场。结果显示,能量密度为19.8 J/kg,接近天然肌肉的能量密度(0.4~40 J/kg),可以承受1 kg 载荷实现8 mm的位移收缩。
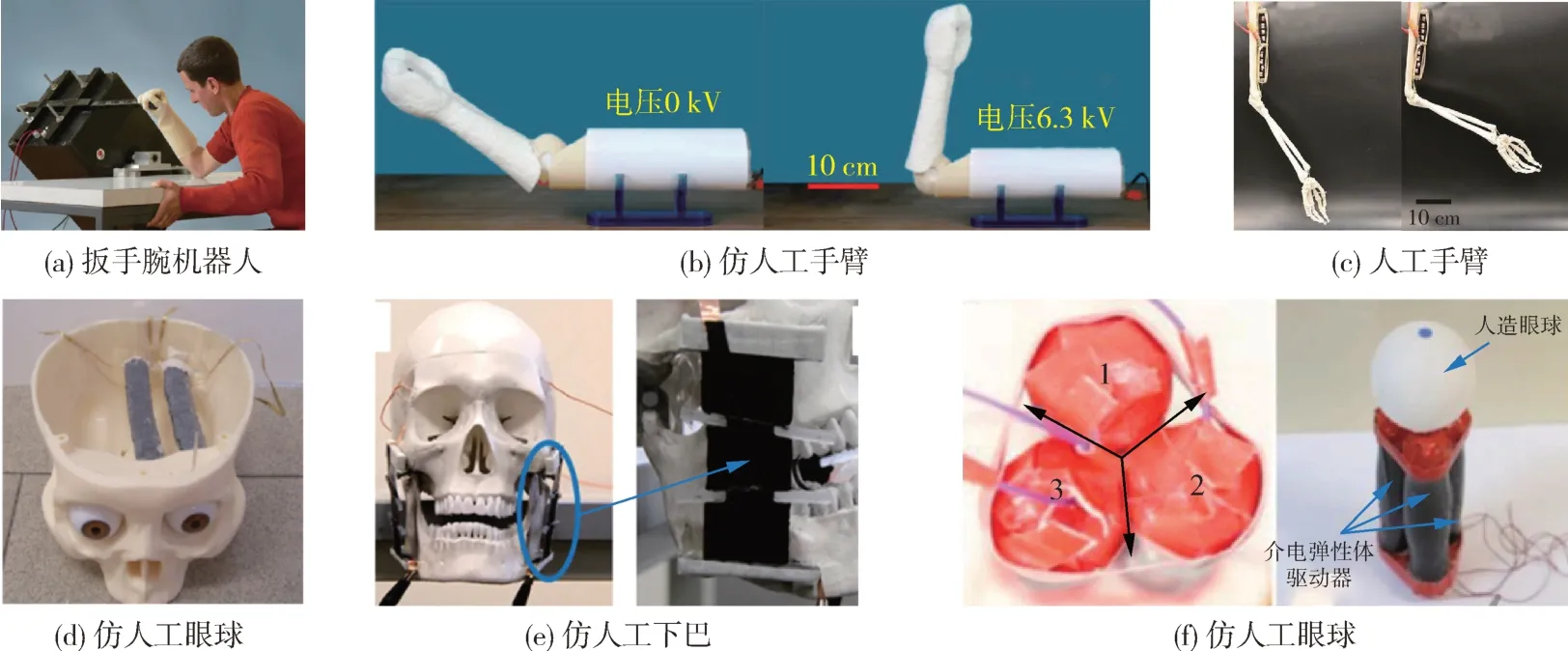
图7 基于DEA的仿人机器人[42-47]Fig.7 DEA-based humanoid robots[42-47]
除了人工手臂之外,研究人员在模拟人类面部表情方面也做了一些努力。例如,Carpi 等[45]提出了一种基于DEA 的单自由度机构,用来模仿眼球外侧和内侧肌肉([图7(d)],并且能提供双向旋转,最大转动角度达到25°。此外,Wang[46]利用2 个DEA 连接上下颌[图7(e)],整体采用前馈控制,很好地模拟了人类的咀嚼运动。而在最近,Li 等[47]用3 个卷轴型DEA 模拟了3 对眼部肌肉[图7(f)]。实现水平、垂直和圆弧运动,并且将3 个DEA 组合在一起,可以有效地跟踪所需的运动轨迹,为开发仿人机器人作出贡献。
2.6 可穿戴机器人
可穿戴机器人不仅是柔性机器人领域的重要研究课题,其中,基于DEA 的触觉显示已经研究多年。早期,Lee 等[48]提出一种带有DEA 的多阵列触觉显示装置[图8(a)]。采用液体耦合作为触摸点进行力的传递,确保人体皮肤接触时的舒适性和安全性。Marette等[49]设计了一种柔性触觉显示器,将柔性晶体管(HVTFTs)与DEAs 集成在一起,形成了16 个独立驱动器的柔性阵列[图8(b)]。在低电压下实现DEA 的开关,HVTFT 能够满足复杂的柔性系统需求,可用于触觉、盲文显示和柔性机器人技术。Mun 等[50]利用多层DEA 和银纳米线柔性电极制备了一种手套式触觉显示装置[图8(c)]。当皮肤接触时,DEA 产生较大的垂直变形,引起用户可感知的触觉输出。Yun 等[51]开发了一个柔性透明的视觉触觉装置[图8(d)],它可与柔性设备和可穿戴设备相兼容。该装置通过光刻技术将触觉感应层堆叠在视觉成像层上,获得轻薄和高透明度的特点,而微型DEA 表现出快速响应和优异的耐用性,使装置可以紧密贴合人体皮肤的同时展示具有视觉信息的可编程触觉响应。同时,Ji 等[52]通过DEA设计了一款可以直接贴附在皮肤上的18 μm 超薄柔性触觉显示装置[图8(e)],可以从1 Hz 到500 Hz 频率下产生丰富的振动触觉反馈,用户能够用指尖正确识别不同的字样,成功率从73 %~97 %不等。此外,Zhao等[53]提出了一种由DEA 阵列组成的可穿戴通信设备[图8(f)]。通过将DEA 集成到护臂中,在控制命令发送到DEA 后,根据所需的驱动序列使皮肤变形,最后通过触觉刺激将信息传递给佩戴者。

图8 基于DEA的可穿戴机器人[48-53]Fig.8 DEA-based wearable robots[48-53]
3 结语
介绍了DEA的材料种类和构型,然后对DEA在柔性机器人中的各种应用进行了分类和讨论,包括抓取、行走/爬行机器人、跳跃/飞行机器人、水下机器人、仿人机器人和可穿戴机器人。总的来说,DEA 驱动的柔性机器人领域目前仍处于快速发展阶段,研究人员和机构进行不断的尝试和研究,使DEA 驱动的柔性机器人更加灵活、自由,在不同的领域得到更广阔的应用前景。
然而,DEA 仍然存在许多挑战,在柔性机器人领域的应用也存在一些障碍。在材料方面,丙烯酸酯DE被用于大位移需求的应用,硅橡胶被用于温度范围更宽操作频率更高的设备。然而,设计一种能够在高操作频率(约100 Hz)下还能保持大而稳定的应变(>100 %)的DE材料依然具有挑战性。因此,合成同时具备高应变和高频率的DE 材料可以显著扩大DEA 的应用范围。对于柔性抓取器,要求其具有更大的输出力,能抓住更大、更重的物体。上述研究表明,多层DEA 抓取器可以解决这个问题,但通过增加层数来提高输出力还不明显,制造和维修成本也较高。因此,我们还要继续努力,寻找更多方法为柔性抓取器提供更好的性能。对于地面、飞行和水下机器人,通常根据移动速度和转弯能力来评估柔性机器人的能力,然而,使用柔性机器人执行困难任务时,稳定性远比速度更重要。其中,柔性机器人的稳定性与其负载能力有关。尽管DEA 具有质量轻的优点,但这也表明其负载能力有限,稳定性有待提高。在这种情况下,在未来的研究中仍需更多的工作来提高稳定性和耐用性,真正发挥DEA 在柔性机器人上的优势,将DEA 的应用领域在生产和日常生活中不断扩大,然后在不久的未来将柔性机器人带到人类的日常生活中。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
弹性体(2021年6期)2021-02-14
文化创新比较研究(2020年7期)2021-01-13
电脑爱好者(2020年6期)2020-05-26
材料科学与工程学报(2016年1期)2017-01-15
光学精密工程(2016年5期)2016-11-07
橡胶工业(2015年3期)2015-07-29
上海电机学院学报(2015年3期)2015-02-28
火炸药学报(2014年5期)2014-03-20
