
水厂絮凝过程矾花状态的自动识别与应用
2023-10-23 08:22陈汪洋
净水技术 2023年10期
陈汪洋
(中国水务投资有限公司,北京 100053)
絮凝是净水工艺中的重要环节,絮凝过程中准确控制絮凝剂的投加量是关键[1]。絮凝剂投加调控面临着几个主要问题。首先是非线性关系[2],投加量和效果之间并非简单线性关系,存在饱和效应或非线性响应。其次,絮凝过程具有较大的迟滞效应[3],投加量的变化不会立即反映在效果上。最后,絮凝过程受到多个变量因素的影响[4],需要考虑这些因素的相互作用和影响关系。为解决这些问题,需要采用系统辨识和模型预测控制等技术,建立准确的非线性模型,并考虑迟滞效应和多变量影响,通过优化算法和控制策略实现准确的投加量控制,以达到最佳效果。
近年来,基于机器学习和深度学习技术的矾花图像识别技术逐渐应用于絮凝优化控制过程[5-6]。机器学习和深度学习的应用可以实现矾花图像的特征提取、分类和目标检测,帮助运营人员发现异常情况,优化投加量,提高絮凝效果和水质稳定性,进一步提升水处理系统的运行效率和可靠性[7]。
然而,基于机器学习或深度学习的矾花图像识别研究仍面临挑战。主要问题包括维数灾难、迁移性差和鲁棒性差。为了解决这些问题,本文提出了基于深度模糊非参数映射(DFM)模型的矾花图像识别增强算法,具有较高的计算效率、识别准确率和鲁棒性,提高了矾花识别的准确性和稳定性。
1 矾花采集实验平台搭建
矾花采集实验平台是由水下摄像机、固定支架、通讯线缆、图像处理器组成。其中,水下摄像机搭载500万像素、工业级、定焦、自动补光的摄像头,具有防水和自动清洗的功能。通过调整镜头焦距,确保矾花图像清晰,并将此焦距作为统一的拍摄标准。水下摄像机的安装位置取决于矾花生成位置和絮凝工艺结构。矾花是由絮凝药剂投加后逐步形成的絮体。因此,矾花图像的拍摄主要集中在矾花成熟状态,即位于絮凝反应池末端,尚未进入沉淀池的过渡区域,如图1所示。水下摄像机应安装在水深为0.5~1.0 m的位置。
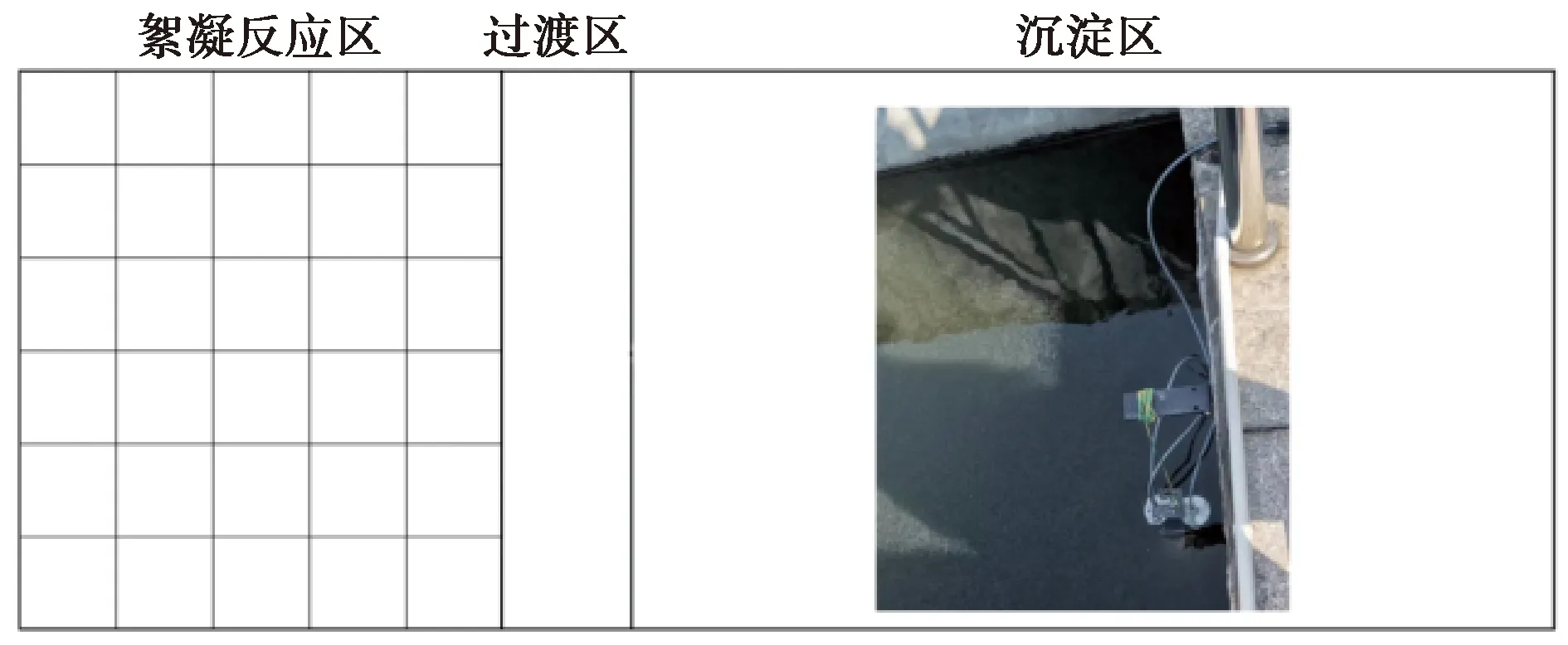
图1 絮凝沉淀池中水下摄像机的安装位置
2 图像分割和特征提取
2.1 图像分割算法
将矾花主体从背景中分离出来是矾花识别的第一步,分离效果会对后续矾花识别的精度有较大影响。本研究测试并比较了目前常见的图像分割算法,包括直方图分割[8]、Log算子分割[9]、Canny算子分割[9]、Otsu算子分割[10]等,结果如图2(a)~图2(f)所示。其中Otsu算法在性能和精度上相较其他算法在本研究试验数据集中取得了最优的效果,如图2(f)所示。Otsu算子能够提取矾花图像中高对比度的线条,这些线条在描绘矾花的轮廓同时还包含间隙,有利于分离形态复杂的矾花。因此,Otsu算子作为本次研究的图像分割算法。
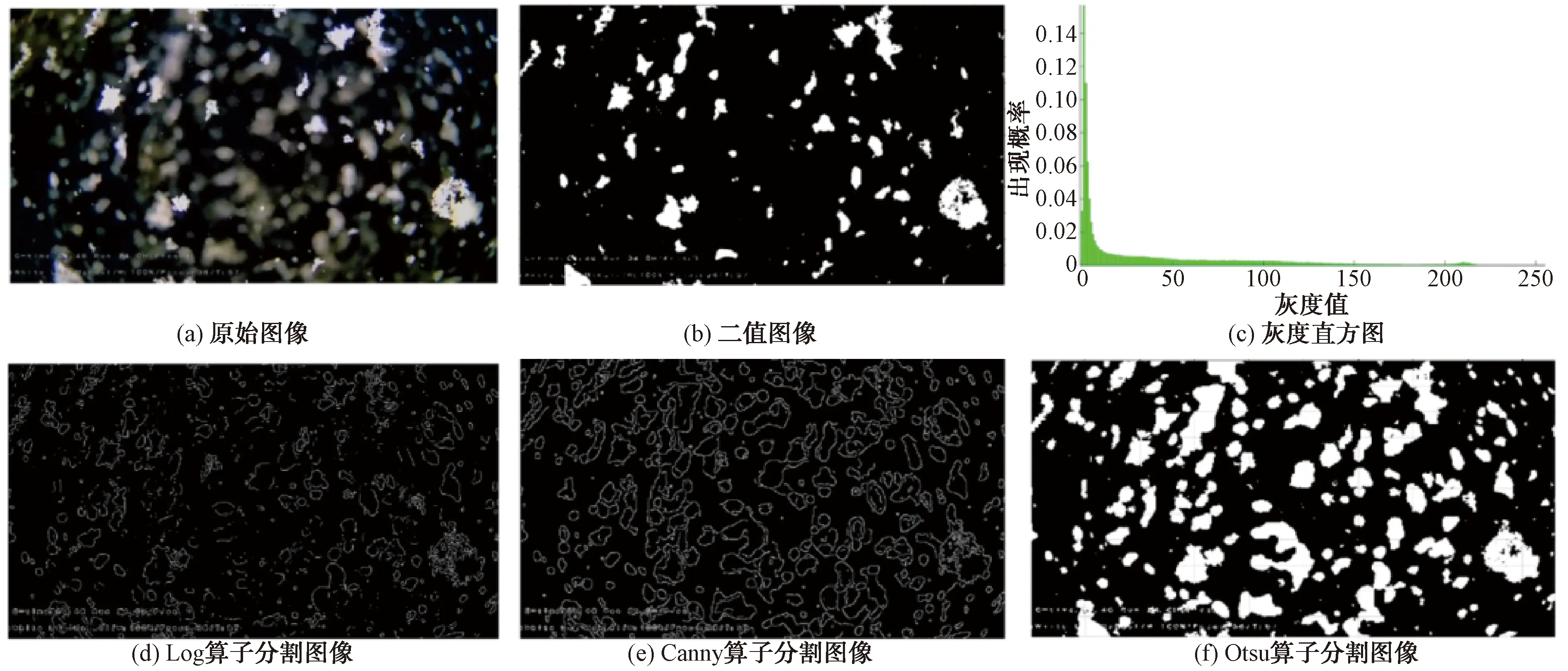
图2 矾花原图与各种图像分割算法对比
2.2 矾花图像特征提取
在矾花图像分割的基础上,本研究进一步提取矾花图像特有的统计特征,作为训练模型的输入,以提高矾花分类的准确率,包括矾花的平均絮凝体尺寸(基于平均费雷特直径)、矾花絮凝体面积、矾花絮凝体面积方差、整体占比、最大片占比、矾花数量、面积中位数、花絮凝体周长、矾花圆形度以及矾花分形维数等。传统对矾花形态的研究主要集中在面积和周长等指标,本研究引入分形维数,分形维数有助于描述欧几里得几何没有很好定义的大型、不规则、多孔聚集体的粗糙表面特征。在分形几何中,面积和体积不是以标准特征长度来表征,而是以整数幂来表征。具有不规则边界的非均匀形态可以通过非线性关系来定义,其中物体的特性随着特征长度维度的增加而缩放,其幂被称为分维。分形维数的计算方法如式(1)[10]。
lnA=DflnL+lna
(1)
其中:A——絮体颗粒的投影面积,m2;
L——投影的最大长度,m;
a——比例常数;
Df——絮体在二维空间的分形维数。
絮体分型维数能够反映混凝阶段,可以将其作为混凝投药量控制的反馈参数。
3 矾花图像数据集构建
本研究基于舟山某水厂絮凝池图像采集系统构建了一个包含不同种类的矾花图像数据集。该数据集的构建经过精心设计和标注,涵盖了典型的矾花形态和颜色变化(表1)。数据集中包含了各种光照条件下的矾花图像,以及不同絮凝剂投加量和池水浑浊度的情况。该数据集的构建为矾花图像识别算法的研究提供了宝贵的资源和平台。研究者们可以利用这个数据集进行算法的训练和评估,提出新的方法和技术来改进矾花图像的识别准确性和稳定性。此外,该数据集还可以用于验证不同算法的泛化能力和实际应用效果。
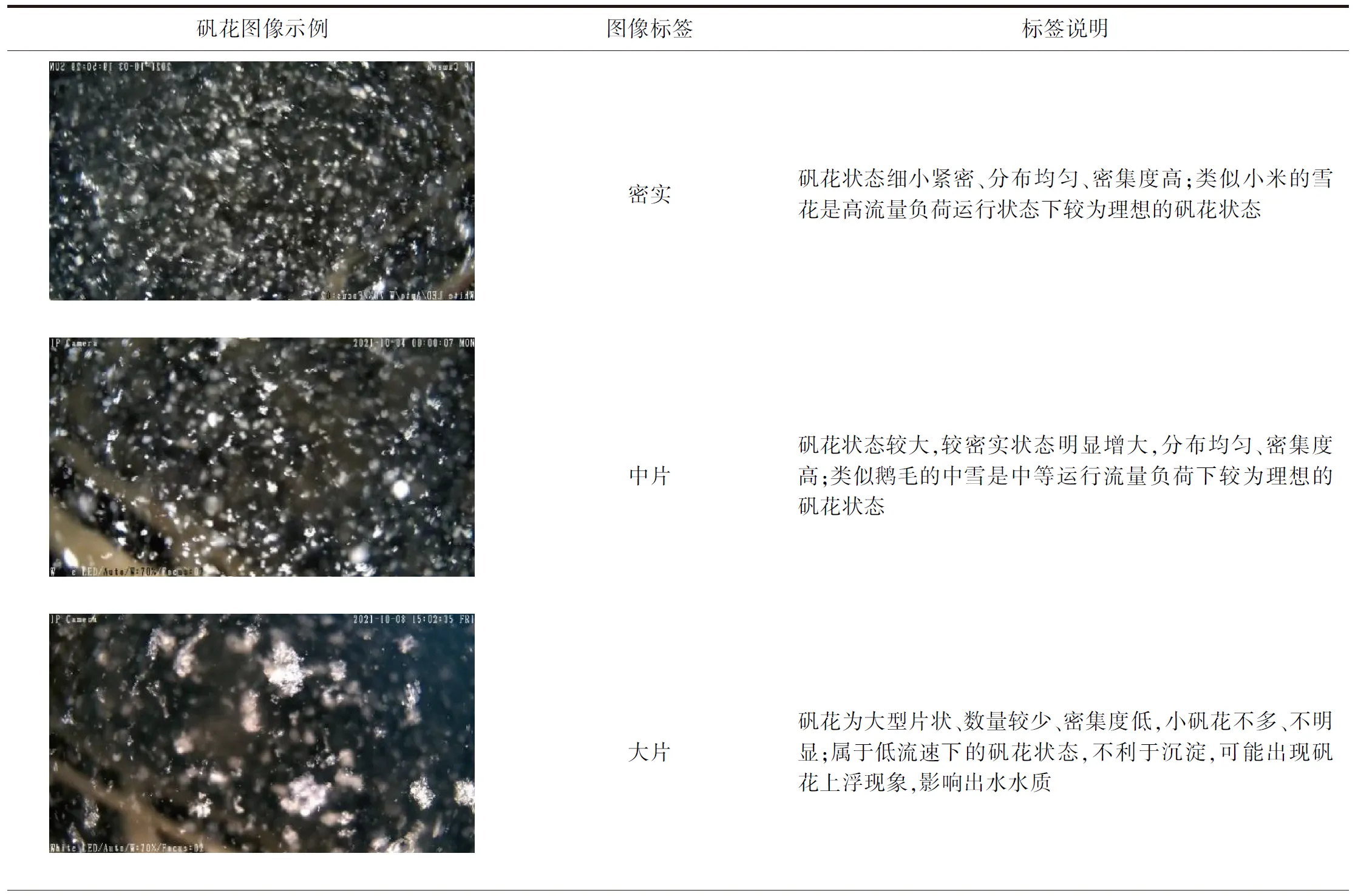
表1 矾花图像标签及说明
本研究矾花图像数据采集覆盖24 h,同时结合舟山某水厂智慧加药系统接入水质参数,包括进水浑浊度、电导率、COD、pH等。研究阶段共采集图像10万余张,对采集图像进行各种特征值的均值,同时剔除异常数据,特征属性如表2所示。
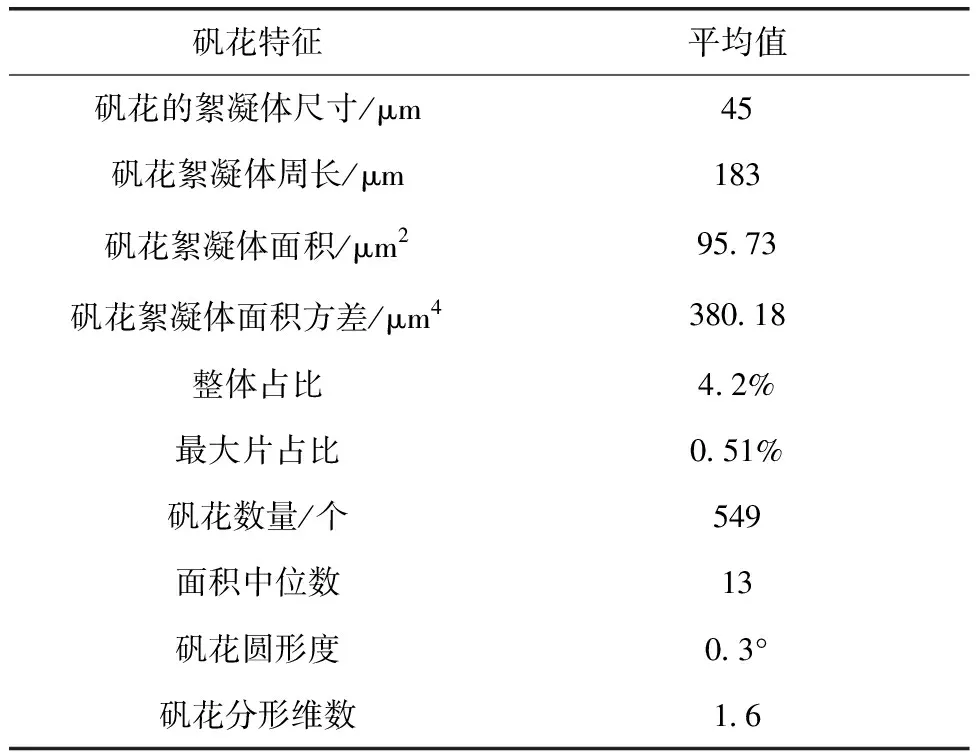
表2 矾花提取特征属性值
4 矾花图像识别
4.1 DFM模型
本文使用DFM对矾花图像进行识别,DFM由若干个DFM单元组成,如图3所示[11]。

图3 多输入多输出DFM
图3为一个典型的多输入多输出DFM模型,其中mx=[mx1,mx2,…,mxn]T∈Rn表示n维无噪音输入向量;x=[x1,x2,…,xn]T∈Rn表示n维有噪音输入向量(观测值);υx=[υx1,υx2,…,υxn]T∈Rn表示n维输入噪音向量,xi=mxi+υxi(i∈1,2,…,n);y=[y1,y2,…,yp]T∈Rp表示p维包含噪音的输出向量;ν=[ν1,ν2,…,νp]T∈Rp表示p维输出噪音向量,yj=Fj(x)+νj(j∈1,2,…,p);Fj(·)表示y第j个输出对应的输入向量x的模糊映射。本文中输入向量x和输出向量y分别对应矾花图像和图像标签,mx、υx和ν参数未知,其特征通常使用模糊隶属函数(例如:高斯隶属函数或伽马隶属函数)来描述。

(2)
(3)
其中:ζ——实数,取值为0~2;
mj——平均向量;
Kxx——N×N协方差矩阵。
Kxx第i行第j列元素如式(4)。
(4)
其中:σ——方差;
wk——权重。
本文所提出的模糊映射是一个非参数模型,因为它没有参数形式的特征,而是通过选择核函数k(xi,xj)来定义其特征。将有限个图3所示的DFM单元组合在一起,形成了深度DFM模型(图4)。

图4 深度DFM模型(L层)

(5)
(6)
(7)
(8)
hl-1,i——第l-1层样本i输入向量;
Λ∈Rp×p——基于奇异值分解(SVD)算法得到的特征值对角矩阵(由大到小排序);
U∈Rp×p——Λ对应的特征向量矩阵;
Al-1——U前nl行组成的矩阵;

4.2 图像识别方法及识别性能对比
为了验证深度DFM模型在矾花图像识别中的性能,本文选用支持向量机(support vector machine,SVM)模型[12]、反向传播(back propagation,BP)神经网络模型[13]、ResNet模型[14]和AlexNet模型[15]与DFM模型进行对比。
4.2.1 SVM模型
SVM是一种广泛应用于分类和回归分析的机器学习方法[12]。SVM的核心思想是通过将数据映射到高维特征空间,使得数据在该空间中线性可分,该映射基于核函数来实现,常用的核函数有线性核函数、多项式核函数和高斯径向基函数。在高维特征空间中,SVM通过最大化支持向量到超平面的间隔来确定最优决策边界。
4.2.2 BP神经网络模型
BP神经网络是一种基于反向传播算法的人工神经网络模型[13]。它是一种多层前馈神经网络,具有强大的非线性拟合能力和适应性。BP神经网络的原理是通过训练数据来调整网络的权值和偏置,从而实现对输入数据的映射和分类。BP神经网络由输入层、隐藏层和输出层组成,通过反向传播算法实现参数训练,并计算梯度和调整权值,逐步减小误差,直到BP神经网络的输出与真实值之间的误差达到预定的精度要求。
4.2.3 ResNet模型
ResNet是一种深度残差网络模型,被广泛应用于图像识别和计算机视觉任务中[14]。ResNet通过引入残差连接来解决深层网络中的梯度消失和网络退化问题,实现了深度网络结构的有效训练。深度残差神经网络的基本结构由残差块组成,使用随机梯度下降(SGD)算法进行优化。在训练过程中,通过最小化损失函数来调整网络的权值,使得网络能够更好地拟合训练数据。
4.2.4 AlexNet模型
AlexNet是第一个将深度卷积神经网络成功应用于大规模图像分类任务的模型[15]。它采用了卷积层和池化层的交替结构,通过卷积操作提取图像的特征,并通过池化操作减小特征图的尺寸。卷积层使用较小的卷积核对输入图像进行滑动窗口操作,提取出不同的特征。池化层则用于降低特征图的尺寸和参数数量,减少计算复杂度。为了进一步提高模型的性能,AlexNet采用了数据增强和Dropout技术。数据增强通过对训练数据进行平移、旋转、翻转等操作,扩充了训练集的规模,减少了过拟合风险。Dropout技术则在训练过程中随机关闭一部分神经元,以减少神经元之间的依赖关系,提高模型的泛化能力。
本文采用2种方案对上述图像识别方法的性能进行对比:(1)方案1,矾花图像数据集不经过处理,直接将原始矾花图像与标签分别作为模型的输入和输出;(2)方案2,使用本文提出的方法首先提取矾花图像特征值,将特征值作与标签分别作为模型的输入和输出。
SVM模型、BP神经网络、ResNet模型、AlexNet模型和DFM模型的相关参数设置如表3所示。
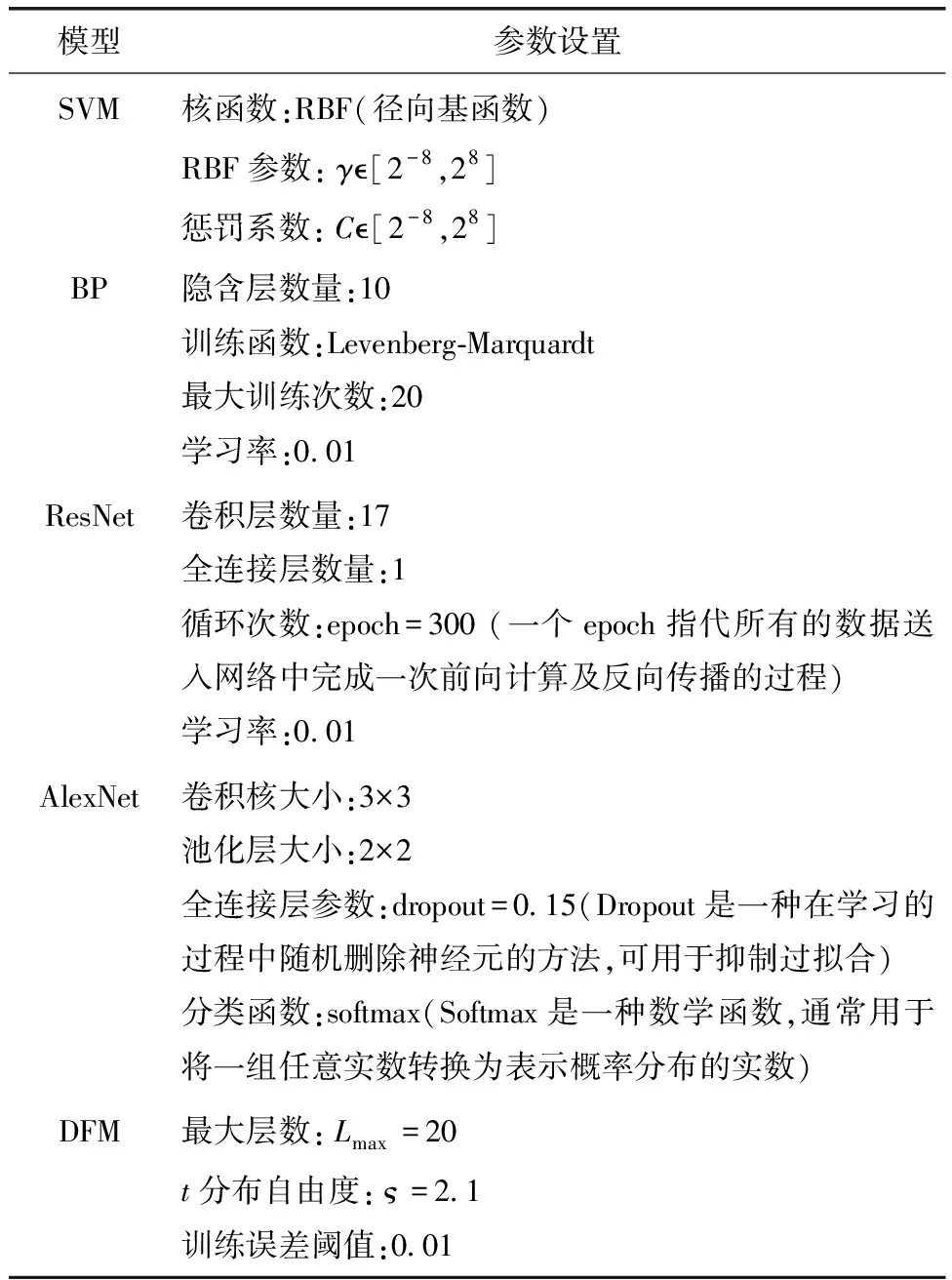
表3 相关模型参数设置
针对上述模型,数据集按7∶3比例随机分为训练集和测试集,训练集用于训练模型参数,测试集用于验证模型的识别精度,矾花图像识别性能对比如表4所示。
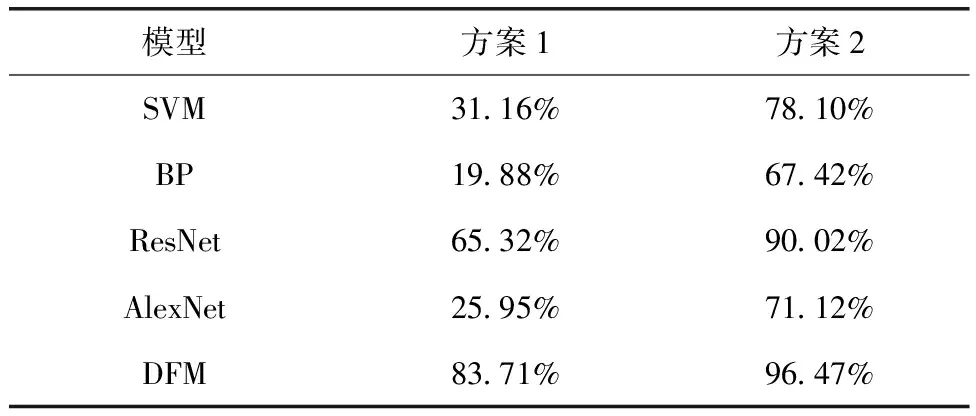
表4 不同方法矾花图像识别准确率
由表4可知,在图像未经过任何处理的情况下,DFM模型仍然具有80%以上的分类准确率。对图像进行预处理,并将特征作为输入,DFM模型能够达到95%以上的识别准确率,表明本文提出的基于DFM模型的矾花图像识别方法具有更高的准确率和稳定性,能够应用于实际工程中。
5 矾花图像识别的工程应用分析
目前,基于DFM模型的矾花图像识别技术已经成功应用在舟山某水厂净水工艺过程中(图5)。本项目加药系统使用前馈+反馈复合加药控制算法(图6)。前馈专家控制器可根据原水的浑浊度、温度、COD等推算出大致的加药量。反馈比例控制器根据矾花识别的状态对沉淀池后水浑浊度反馈作微调,最后,结合实时流量算出最佳加药量。
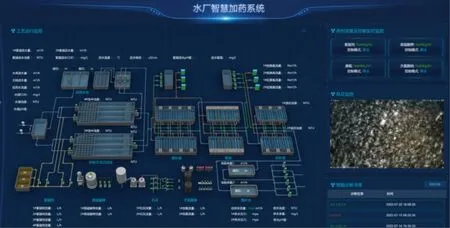
图5 水厂智慧加药系统

图6 絮凝加矾系统优化控制过程:前馈+反馈流程
前馈控制:首先将水厂现状及该水厂的水质因素进行分析研究,然后以影响出水水质主要因素为输入,如原水流量、原水池度、原水温度及原水值为输入,混凝剂投加量为输出,建立混凝投药量通用寄存器(general purpose register,GPR)前馈控制系统。
反馈控制:被控量实际输出与设定值存在偏差,控制器通过检测到的差值,有针对性地进行调节的过程。本方案反馈控制以矾花图像算法为基础,水下图像采集装置以500万~1 000万像素工业相机为传感器,以PC为主控器,连续采集水厂处理池中矾花图像。根据本文描述的图像分割-特征提取-算法识别过程实时分析矾花形态(图7),评判水质参数,用于自动监测水厂净水处理过程中的絮凝状态,反馈调节加矾量,同时减少絮凝过程中检测絮凝效果的时滞。采用反馈校正和在线滚动优化指标的策略,能够有效克服受控对象的时延、时变和不确定性等因素的动态影响,并使系统具有良好的稳定性和鲁棒性。
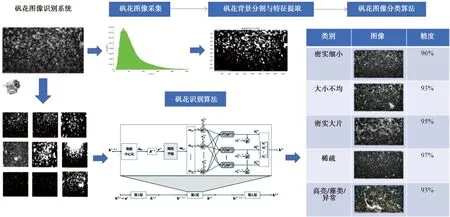
图7 矾花识别系统:图像采集+分割+特征提取+识别算法
5.1 出水浑浊度达标率分析
图8为出水浑浊度达标率的对比,系统12月1日开始测试,数据取自2022年7月——2023年5月,间隔周期为10 min。如图8所示,使用前后,沉后水浑浊度波动明显降低,水质更加稳定,系统投用后沉后水浑浊度达标率(小于1 NTU)占比由82.2%上升为95.6%,具体数据如表5所示。
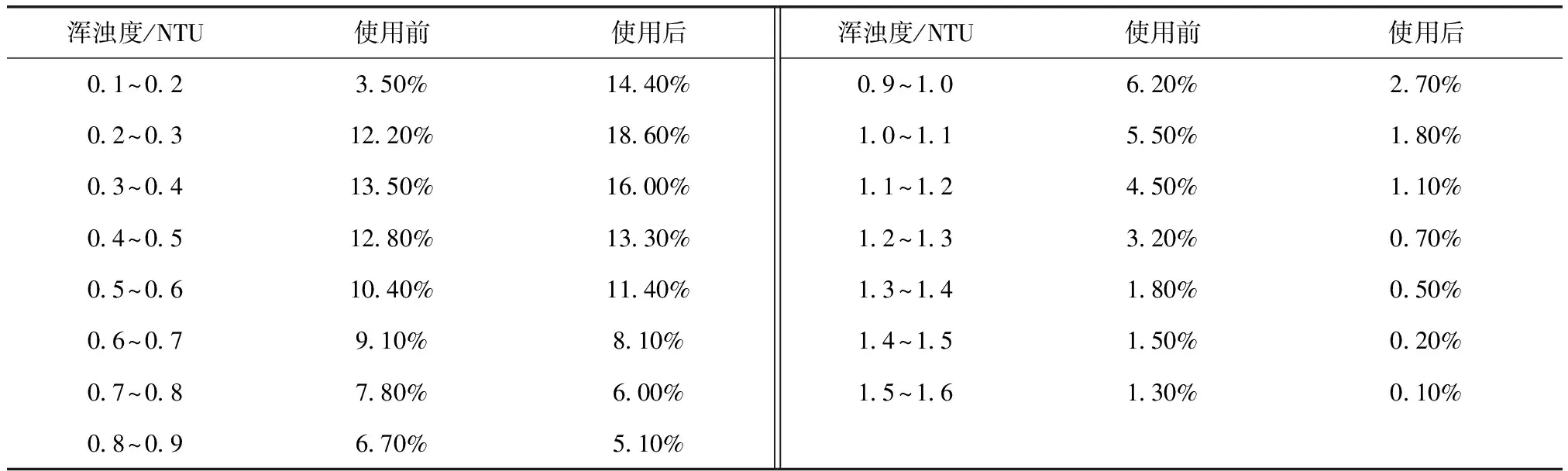
表5 不同方法矾花图像识别准确率
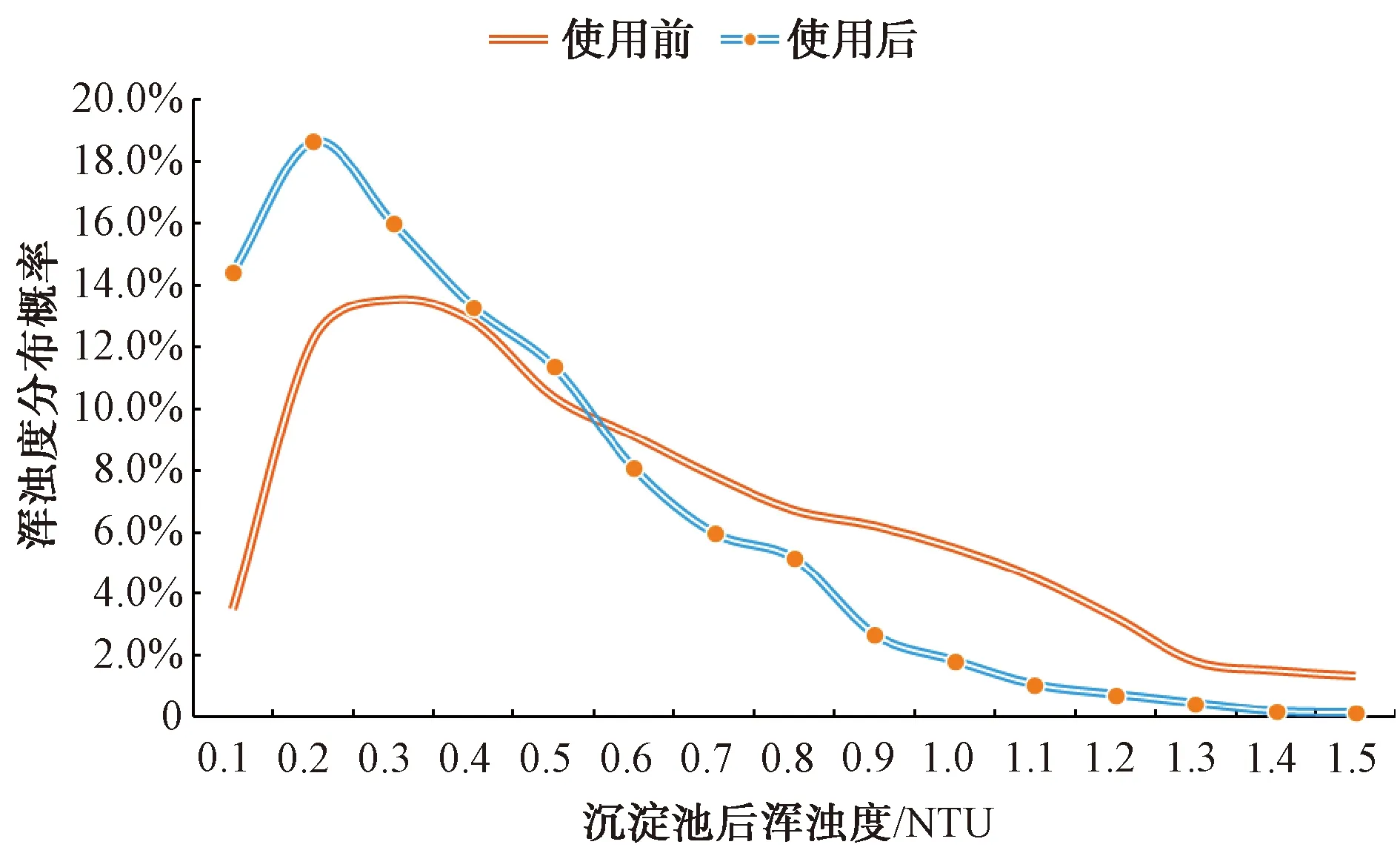
图8 出水浑浊度达标率对比
5.2 出水浑浊度稳定性分析
图9为出水浑浊度稳定性的对比,2023年1月18日目标值由0.7 NTU调到0.25 NTU,1月29日调到0.7 NTU,2月10日调到0.6 NTU,3月3日调到0.35 NTU,伴随着沉后浑浊度真实值随目标值变化。数据做目标值与真实值的差值对比,引入偏差值。偏差值在±0.2 NTU的数据,占数据总量的91.5%,沉后浑浊度控制精度保持在90%以上时间达到±0.2 NTU以内。
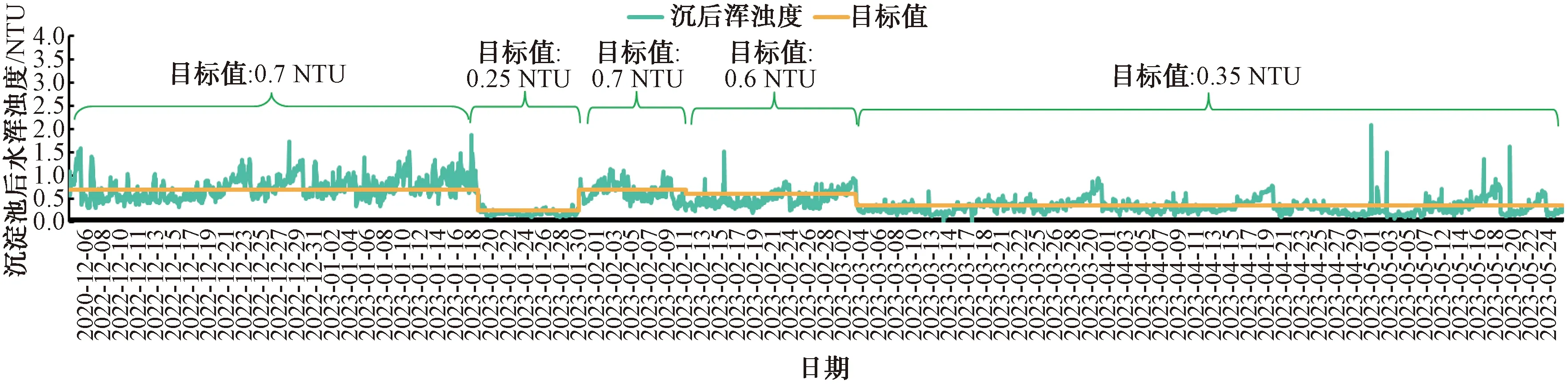
图9 2022年12月—2023年5月出水浑浊度稳定性对比
5.3 系统药耗使用量分析
表6为系统药耗使用量对比分析,加药量对比需要在相同的进水水质下作药剂对比分析,因此,选用相同的时间段和进水水质,采用原有的控制方式和智慧加药对比。2022年11月,采用了智慧加矾控制的4#和原有的控制的1#~3#进行对比,1#~4#沉淀池出水浑浊度均值分别为0.67、0.72、0.64、0.69 NTU,1#~3#药耗均值为30.48 mg/L,4#为23.84 mg/L。在1#~3#与4#出水浑浊度均值在0.6~0.7 NTU的情况下,4#的药剂消耗较1#~3#的药剂消耗降低21.78%。
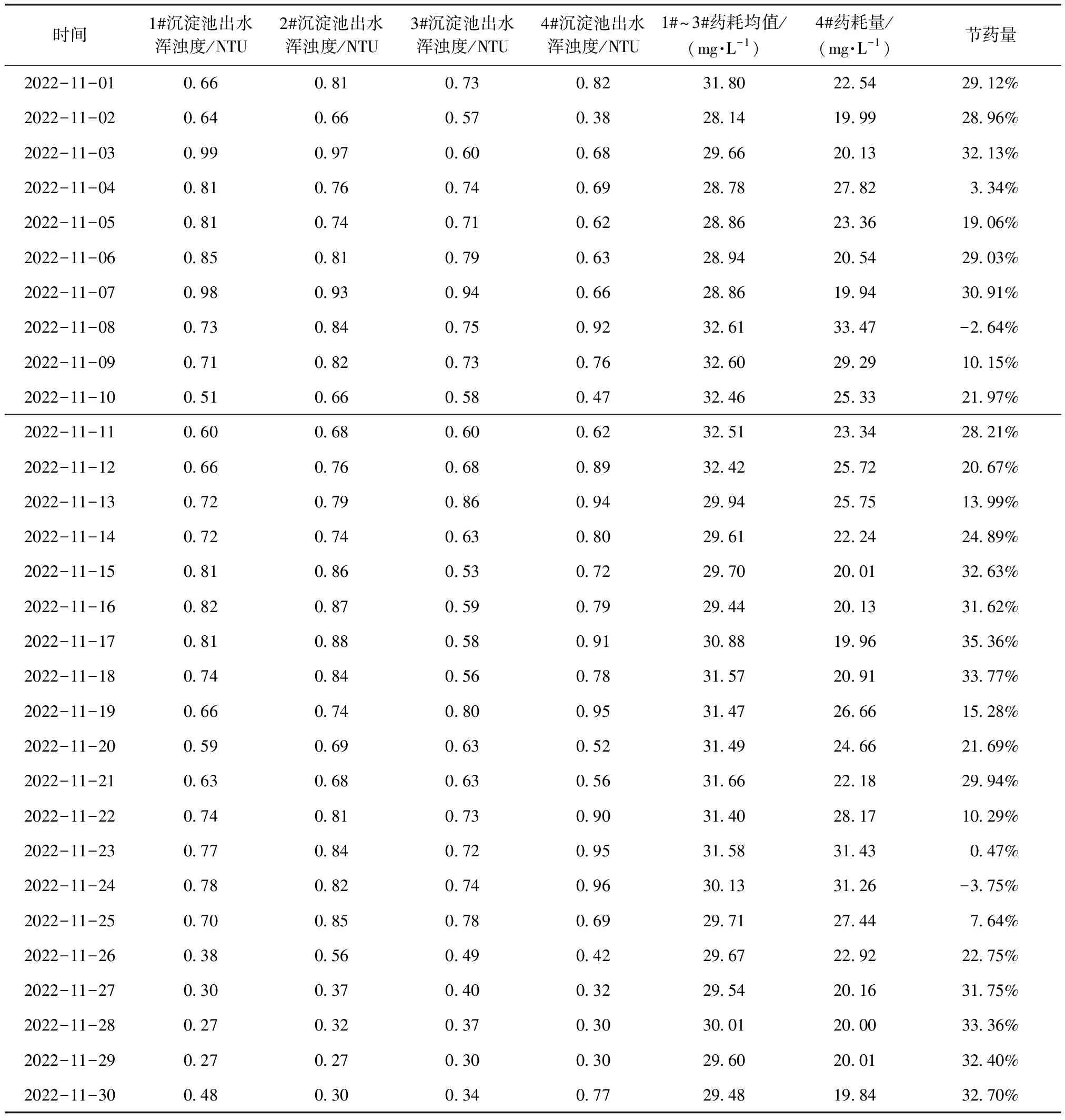
表6 系统药耗使用量分析
6 结论
(1)分割算法方面分别对直方图分割、Log算子分割、Canny算子分割、Otsu算子分割加线性变化等算法并进行比较,结果表明Otsu算法结合线性变化在性能和精度上相较其他算法在本研究试验数据集中取得了最优的效果。
(2)特征提取方面:计算了矾花的平均絮凝体尺寸(基于平均费雷特直径)、矾花絮凝体面积、整体占比、最大片占比、矾花絮凝体周长,矾花圆形度以及矾花分形维数。结果表明,从矾花图像中提取密度特征和尺寸特征作为模型输入,能够达到最好的识别效果。
(3)识别算法方面:将上述特征作为识别模型输入参数,将矾花状态细分为密实、中片、大片、不均和稀疏5种类型,采用SVM、BP神经网络和深度学习方法(ResNet和AlexNet模型)和研究团队自主开发的深度DFM算法。结果表明,DFM模型在多次试验中能够达到95%以上的识别准确率,明显优于传统的机器学习和深度学习方法。
(4)基于DFM模型的矾花图像识别技术已在舟山某水厂应用,采用矾花状态进行絮凝加药量的反馈调教,应用前后絮凝剂平均投加量由原来的11 mg/L降低为8.5 mg/L,沉淀池平均出水浑浊度由原来的0.9 NTU降低为0.4 NTU。
(5)本项目使用数据来自单一地区原水水质,后续工作将采集更多不同水质条件下数据,进一步研究矾花图像与水质参数相关性的通用性特征量。
猜你喜欢
净水技术(2022年8期)2022-08-10
新高考·高一数学(2022年3期)2022-04-28
人民长江(2021年10期)2021-12-09
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
水资源保护(2016年3期)2016-06-21
高中生学习·高三版(2016年9期)2016-05-14
