
信号交叉口智能电动汽车转弯车速引导策略
2023-10-22 05:11刘显贵
厦门理工学院学报 2023年3期
张 乐,刘显贵
(厦门理工学院机械与汽车工程学院,福建 厦门 361024)
根据公安部统计,2022 年全国机动车保有量达 4.17 亿辆,其中汽车 3.19 亿辆[1]。汽车在为人类提供便利的同时也使得交通堵塞、环境污染等社会问题日趋严重。由于行经信号交叉口的车辆频繁出现怠速和启停的工况,使得交叉口成为道路交通网络中高能耗、低效率的区域[2-3]。因此,在汽车低碳化、智能化发展的大背景下,如何让车辆节能、高效地通过信号交叉口,具有重要的研究意义。目前,信号交叉口车速控制方法的研究[4-6]大多针对单一车辆直行场景进行车速优化控制,对存在前方车辆和对向来车的复杂交叉口区域车辆转弯行驶场景中的车速引导策略研究较少,转弯避撞控制策略的研究文献中对于车辆转弯行驶能耗及通行时间的分析也较少提及。为此,本文选取智能电动汽车作为欲转弯车辆,针对其在信号交叉口需要加/减速引导通行的场景,确定出可不停车通过交叉口的速度引导范围,基于目标引导车速相关联的电动车能耗模型,建立综合考虑车辆能耗和通行时间的多目标优化函数,运用NSGA-II算法在引导范围内寻求最优引导车速,通过预先在引导区间内对欲转弯车辆进行加/减速调控,实现车辆在信号交叉口节能、高效地转弯通行。
1 目标引导车速相关联的电动汽车能耗模型
本文在传统模型基础上考虑制动能量回收功能的能耗模型[7]。该模型在能耗分析计算时不考虑道路坡度对车辆的影响,同时忽略驾驶员因素对制动回收能量的影响。
1.1 加速引导通行场景中电动汽车的能耗模型
加速引导通行场景包括车速引导区内匀加速至目标引导车速的加速阶段,达到目标引导车速后的匀速阶段,以及交叉口内以目标引导车速匀速转弯阶段。总通行时间Ta为
式(1)中:ta为车速引导区间内加速阶段时间;ty为车速引导区间内匀速阶段时间;tz为交叉口内以目标车速匀速转弯阶段时间;vc为目标引导车速;v0为初始车速;a为加速度,为正值;Z为引导区间长度;S为交叉口内转弯路程。
汽车在以目标引导车速匀速转弯行驶过程中,轮胎的侧偏角对滚动阻力产生影响,当侧向加速度在[0,2.5]m·s-2时,附加的弯道滚动阻力[8]为
式(2)中:m为车辆总质量;为线性化的弯道滚动阻力系数斜率;R为弯道半径。
加速引导通行场景中的能耗Ea可以表示为
式(3)中:CD为汽车空气阻力系数。
1.2 减速引导通行场景中电动汽车的能耗模型
减速引导通行场景包括车速引导区间内匀减速至目标引导车速的减速阶段,达到目标引导车速后的匀速阶段,以及交叉口内以目标引导车速匀速转弯阶段。总通行时间Td表示为
式(4)中:td为车速引导区间内减速阶段时间;a为减速度,为负值。
减速过程中,车辆的动能一部分被行驶过程中受到的道路阻力和空气阻力所消耗,另外一部分则转变为车辆制动器的热能。
车辆减速制动过程中的能耗Ez可表示为
式(5)中:ηEV为整车效率。
纯电动汽车制动时的电动机制动能量回收值Er可表示为
式(6)中:κ为电机制动力占总制动力百分比;ηc为蓄电池充电效率。
减速引导通行场景中的能耗Ed可以表示为
2 信号交叉口转弯车速引导策略
文中提出的车速引导策略是在车联网环境下建立的。当车辆进入信号交叉口速度引导区间时,车路协同系统可以实时获取欲转弯车辆、前方车辆和对向来车的位置及运动状态数据,以及信号灯相位、灯时和道路信息。设立以下假设:1)研究范围为单一信号交叉口区域,不受相邻交叉口的影响;2)研究道路为双向四车道,内侧车道可供车辆直行和转弯通过;3)当欲转弯车辆进入引导区间后,对向来车及欲转弯车辆所在车道的前方车辆均将在交叉口内匀速直行不进行转弯行驶,即不考虑欲转弯车辆的前方呈现直行车与转弯车混流状态的复杂情况;4)欲转弯车辆在安全的情况下完全执行引导策略给定的速度轨迹;5)路面平坦,不考虑坡度对车辆行驶的影响。
2.1 车速引导场景划分
欲转弯车辆行驶到存在信号灯、前方车辆,以及对向来车的复杂交叉口附近时,其通行场景可总结为图1~3所示的3种类型。图中红绿色条代表对应时刻信号灯的相位。借助车联网系统获取前方车辆与对向来车的位置和运动状态信息,以及信号灯相位、灯时和道路信息,综合判断分析后确定对应场景下的车速引导策略。
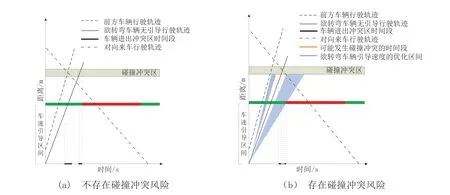
图1 车辆匀速进入交叉口的通行场景示意图Fig.1 Scene of vehicle entering intersection at a constant speed
1)匀速引导策略如图1(a)所示,若欲转弯车辆可以保持初始速度跟随前方车辆匀速进入交叉口且在交叉口内转弯通行过程中不与对向来车发生碰撞冲突,则控制车辆保持匀速进行转弯通行。与之相比,如图1(b)所示,若欲转弯车辆虽然可以匀速进入交叉口,但存在与对向来车发生碰撞冲突的危险,则预先在停止线前的车速引导区间内对欲转弯车辆采取加/减速引导策略,避免危险的发生。
2)加/减速引导策略如图1(b)、图2 和图3 所示,欲转弯车辆以当前车速无法实现不停车进入交叉口,但可以预先在停止线前的车速引导区间内通过调整车速至目标引导车速,而后再以匀速行驶的方式,实现不停车进入交叉口的同时,保证在交叉口内转弯行驶过程中也不与对向来车发生碰撞的目的。
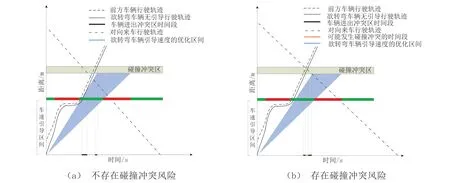
图2 车辆减速进入交叉口的通行场景示意图Fig.2 Scene of vehicle decelerating into intersection
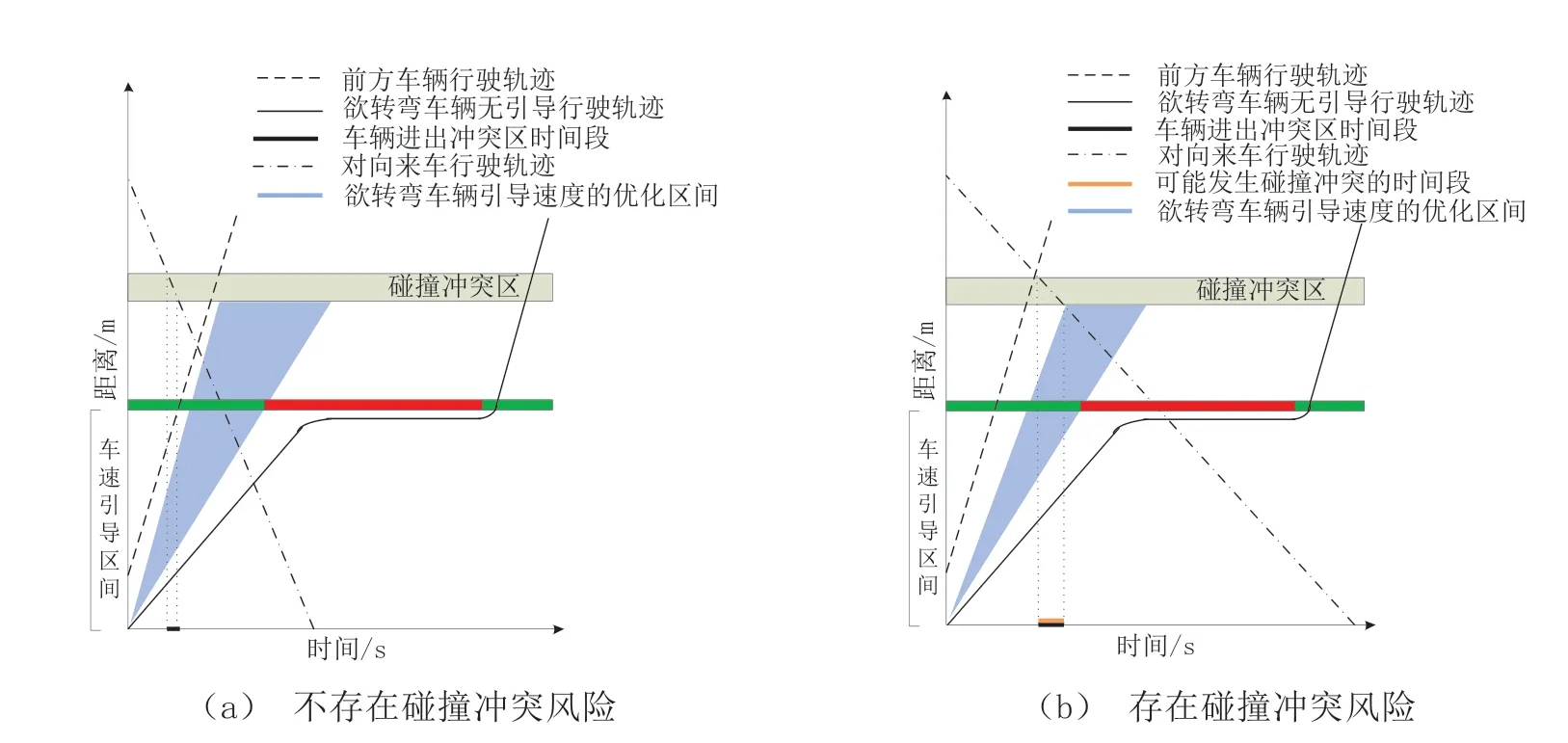
图3 车辆加速进入交叉口的通行场景示意图Fig.3 Scene of vehicle accelerating into intersection
车速引导策略判断流程图如图4所示。

图4 车速引导策略判断流程图Fig.4 Decision process of speed guidance strategy
图4中:Tj为交叉口附近的对向来车驶入冲突区域的时间;Tc为交叉口附近的对向来车驶出冲突区域的时间。T11+T12为加速引导策略下,欲转弯车辆在引导区间加速追上前方车辆后,再匀速紧跟前方车辆驶入交叉口,转弯至冲突区的时间;T13+T14为减速引导策略下,欲转弯车辆在引导区间进行减速,使其恰好在本次绿灯相位的最后一秒进入交叉口,然后匀速转弯驶出冲突区的时间;T21+T22为减速引导策略下,欲转弯车辆在引导区间进行减速,使其恰好在下一个绿灯相位的第一秒跟随前车驶入交叉口,然后匀速转弯至冲突区的时间;T23+T24为减速引导策略下,欲转弯车辆在引导区间进行减速,使其恰好在下一个绿灯相位的最后一秒进入交叉口,然后匀速转弯驶出冲突区的时间。T31+T32为加速引导策略下,欲转弯车辆在引导区间进行加速,追上前方车辆后,再匀速紧跟前方车辆驶入交叉口,转弯至冲突区的时间;T33+T34为加速引导策略下,欲转弯车辆在引导区间进行加速,使其恰好在本次绿灯相位的最后一秒进入交叉口,然后匀速转弯驶出冲突区的时间。
2.2 目标引导车速优化范围
目标引导车速优化范围如图1(b)、图2 和图3 中蓝色阴影区域所示。该范围需要综合欲转弯车辆、前方车辆和对向来车的运动状态,以及当前信号灯状态,由式(8)确定各场景下目标引导车速的具体优化范围。即
式(8)中:d为欲转弯车辆进入车速引导区间后行驶到某一指定位置的路程;t为与d相匹配的时间,由引导策略的需求而定。
目标引导车速的优化范围如表1所示。表1中:匀速表示欲转弯车辆可以保持当前车速跟随前方车辆在绿灯相位匀速进入交叉口;加速/减速分别表示欲转弯车辆需要适当加/减速才能保证其在绿灯相位内进入交叉口,避免在停止线前减速停车等红灯;有/无冲突分别表示欲转弯车辆在交叉口内转弯通行的过程中会/不会与对向来车发生碰撞冲突的危险;Tgs表示欲转弯车辆抵达车速引导区间时绿灯剩余时间;Ty和Tr分别表示信号灯黄灯和红灯时长;Tq表示前方车辆抵达交叉口停止线的时间。S(θ1)和S(θ2)分别表示欲转弯车辆从停止线驶入和驶出冲突区所行驶的距离;TA、TB分别表示对向来车驶入和驶出冲突区的时间。
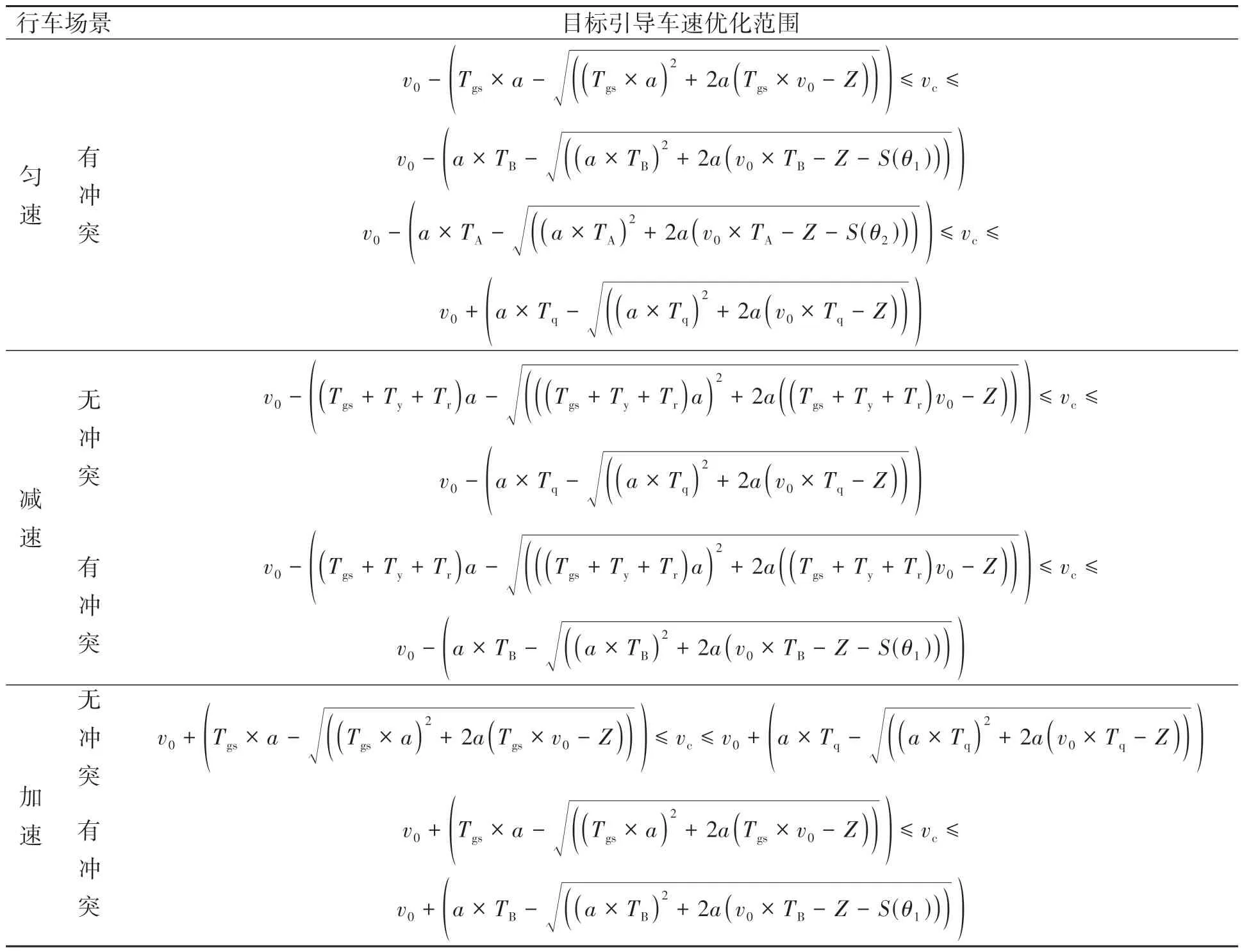
表1 目标引导车速的优化范围Table 1 Optimization range of target speed to guide
2.3 基于NSGA-II算法的车速引导优化
本文以车辆能耗和通行时间最小化为目标,运用NSGA-II算法在相应的优化范围内寻求最优引导车速。
NSGA-II(non-dominated sorting genetic algorithm-II,NSGA-II)是带精英策略的非支配排序遗传算法[9],属于遗传算法的一种改进算法,其具体工作流程如图5所示。
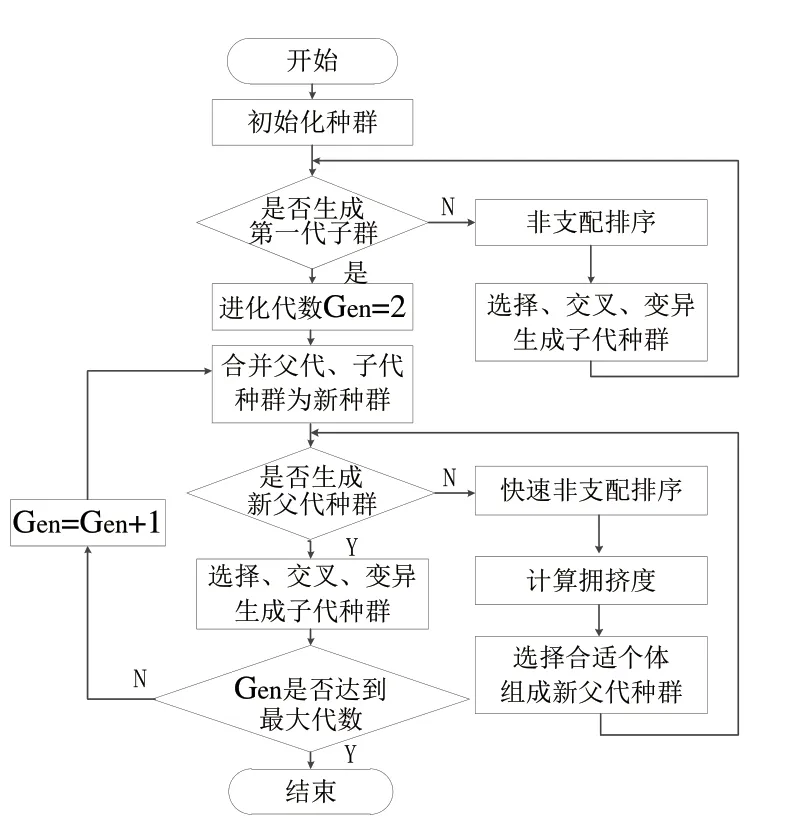
图5 NSGA-II算法工作流程图Fig.5 NSGA-II workflow
为更好体现各优化目标优化效果,将欲转弯车辆以道路最低车速通过交叉口的场景定义为基准场景,设置能耗目标函数为
式(9)中:E(vc)为欲转弯车辆采用加速或减速引导策略时的能耗;E(y)为欲转弯车辆以道路最低车速通过交叉口时的能耗。
通行时间目标函数为
式(10)中:T(vc)为欲转弯车辆采用加速或减速引导策略通过交叉口的时间;T(y)为欲转弯车辆以道路最低车速通过交叉口的时间。
本文利用Matlab 多目标遗传算法工具箱进行求解,设置种群数量为80,最大进化代数为300 代,交叉概率为0.8,变异概率为0.2。运行过程因 pareto 解集变化过小而终止运算,获得 pareto 最优解集。选择车速变化量最小的pareto解作为最优解即最优引导车速。
3 仿真实验
本文以图6 所示的欲转弯车辆在交叉口左转弯通行为例来进行仿真实验。分别选取绿灯剩余25 s、前方车辆初速度50 km·h-1,绿灯剩余5 s、前方车辆初速度30 km·h-1,绿灯剩余25 s、前方车辆初速度30 km·h-1这3种交通场景。设定欲转弯车辆的速度引导区间为交叉口前300 m,前方车辆初始位置为交叉口前200 m 处。考虑到交叉口通行安全,参照《城市道路工程设计规范(CJJ 37—2012)》中道路的设计速度规定,设置最高引导车速为70 km·h-1,最低引导车速为20 km·h-1。设定交叉口信号灯相位配时固定,信号周期设为123 s,其中绿灯与红灯均为60 s,黄灯为3 s。此外参照我国现行的交通法规,本文将黄灯同红灯一样视为禁止通行,设定文中涉及到的车辆长度(L)均为4.5 m,宽度(w)均为1.8 m。
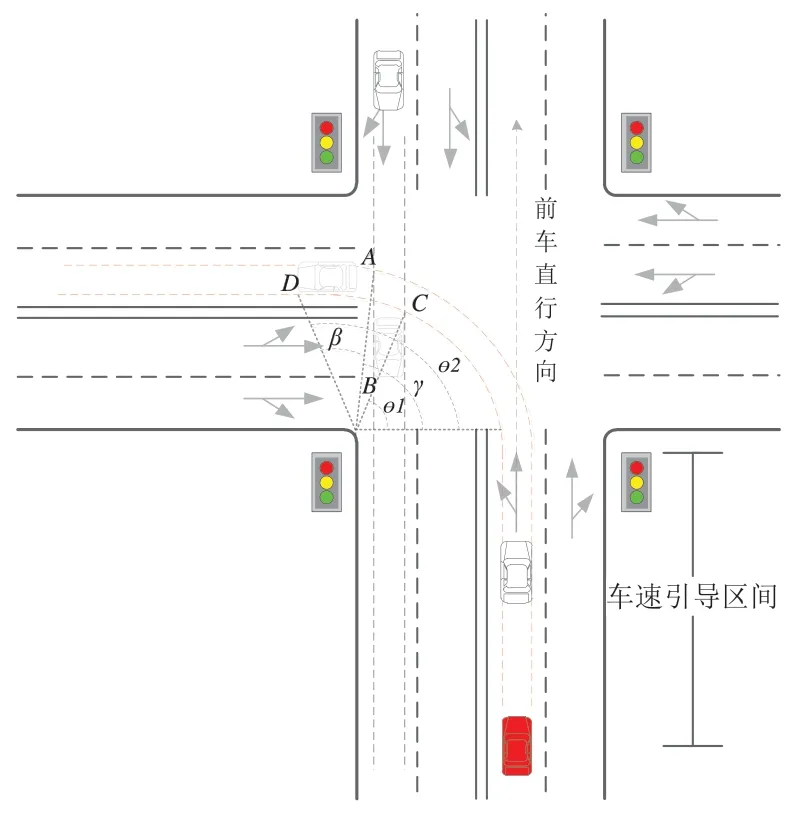
图6 车辆在交叉口左转弯通行示意图Fig.6 Scene of vehicles turning left at intersections
由图6 中车辆行驶轨迹的几何关系和车辆行驶状态的相关数据可求解出对向来车进出冲突区时的交点A和B的坐标和欲转弯车辆进出冲突区时的交点C和D的坐标。
由运动学方程和车辆行驶数据,分别求出欲转弯车辆和对向来车驶入冲突区和驶出冲突区的时间为
式(11)~(14)中:θ1和θ2分别为欲转弯车辆左转行驶到C点和D点时所对应转过的角度;TC、TD分别为欲转弯车辆驶入和驶出冲突区的时间;vj为对向来车的初始车速;yj为欲转弯车辆抵达引导区间时对向来车所在位置的纵坐标。
由于β值极小,为保证行车安全性,令,结合图6 中的几何关系,利用勾股定理可分别求得
基于Matlab软件在前文设置的3种交通场景,以欲转弯车辆的行驶数据为依据,通过调整对向来车的位置和速度,使欲转弯车辆分别产生满足加速或减速引导策略的条件,并在道路限定速度区间内赋予欲转弯车辆不同初速度进行多组仿真,用以检验加/减速引导策略的有效性。此外,以各场景中无车速引导策略控制下的仿真结果作为对照组,来反映引导策略的优化效果。匀速行驶存在碰撞冲突的优化效果如图7所示。
由图7 可见,2 种引导策略在通行时间方面相较于无控制行驶时优化程度都较为明显,尤其是采用加速引导策略,最高优化百分比可达到45.46%,但其目标引导车速过高,超过预先设定的最高引导车速,因此只能选择减速引导策略。虽然减速引导策略在通行时间方面优化效果较差,但车辆进行减速控制使得车辆能耗优化效果较好。
减速引导策略下的优化效果如图8所示。由图8 可见,欲转弯车辆进入交叉口后不会与对向来车发生碰撞冲突的情景中采用车速引导策略后反而在能耗和通行时间两方面效果变差,这是因为在这次仿真场景中,若欲转弯车辆按无车速引导策略控制行驶时,当其抵达交叉口停止线时,红灯剩余时间较短但尚未结束,仍须刹车进行停车等待,因此为了追求不停车通行而提前进行降速调整,导致整体通行时间加大,能耗也相应增加。

图8 减速引导策略下的优化效果Fig.8 Optimization effect under deceleration guidance strategy
加速引导策略下的优化效果如图9 所示。由图9 可见,2 种场景下的加速优化策略都可以使欲转弯车辆在当前绿灯相位内进入交叉口,从而了避免长时间的停车等待,因此控制效果在车辆通行时间方面极为优秀,优化百分比均接近70%左右,其中在不存在碰撞冲突的场景中优化效果最高可达71.11%。与此相比,在该仿真场景中,由于车辆速度优化范围较小,因此能耗优化效果较差。
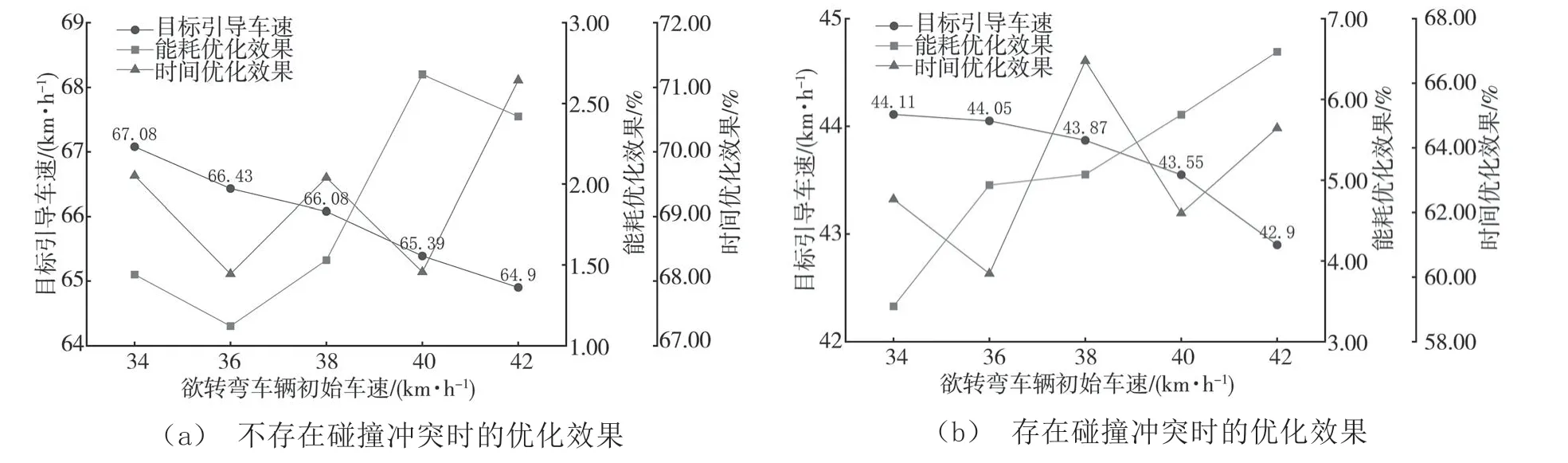
图9 加速引导策略下的优化效果Fig.9 Optimization effect under acceleration strategy
4 实车实验
所用实验车辆为某牌智能电动汽车,可实现对外部导入的期望轨迹及速度进行精确跟踪,其主要搭载的仪器有激光雷达、高清摄像头、功率分析仪、车载笔记本电脑等设备。实验车辆及相关搭载设备如图10所示。

图10 实验车辆及相关搭载设备Fig.10 Test vehicle and related equipment
为进一步验证本文提出的车速引导策略的优化效果,在3 种仿真实验中随机各取一种初始车速及其对应的引导策略来进行实车实验,并以相应的无车速引导策略控制下的通行结果为参照。由于图7(b)的仿真结果表明匀速行驶存在碰撞冲突的场景中加速引导策略给出的引导车速超过设定的引导上限,因此不再对该种场景中的加速通过情况进行实验。
实车实验结果如表2所示。通过对比仿真实验结果与表2 所示的实车实验结果可知,由于一方面仿真实验所采用的电动车模型受其建模精准度影响,导致仿真数据与实车实验数据存在偏差;另外一方面是由于实车实验的测试环境相比于理想化的仿真实验环境更加真实,容易受到实验道路状况、实验车辆性能等诸多方面因素的影响,导致两者存在一定差距。但偏差在合理的范围之内,且整体的优化效果基本相同。因此,实验结果能够进一步证明本文提出的车速引导策略的可行性和有效性。

表2 实车实验结果Table 2 Results of real vehicle test
5 结论
本文通过对存在信号灯、前方车辆,以及对向来车的信号交叉口中车辆转弯行驶场景进行分析,针对需要加/减速引导通行的场景,确定出可使车辆不停车通过交叉口的速度引导范围;基于行驶车速相关联的电动车能耗模型,建立综合考虑车辆能耗和通行时间的多目标优化函数;运用NSGA-II算法在引导范围内寻求最优引导车速,通过预先在引导区间内对欲转弯车辆进行加/减速调控,实现其在信号交叉口节能、高效地转弯通行。仿真实验结果表明,采用加速引导策略时车辆能耗降低6.59%,通行时间减少71.11%;采用减速引导策略最高可使能耗降低6.07%,通行时间减少23.01%。实车实验结果表明,采用加速引导策略最高可降低能耗5.32%,通行时间减少68.12%;减速引导策略最高可使能耗降低5.14%,通行时间减少17.72%。仿真及实车实验结果有效证明本文提出的车速引导策略可以在降低能量消耗的同时,减少其通过交叉口的时间。
猜你喜欢
中学数学研究(广东)(2023年9期)2023-06-03
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
汽车维护与修理(2018年1期)2018-04-04
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
中国房地产业(2016年2期)2016-03-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
系统工程学报(2015年3期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28
警察技术(2015年6期)2015-02-27
河南科技(2014年14期)2014-02-27
