单惯量伺服驱动系统参数辨识研究
2023-10-21 08:43:26陈子欢王永青
组合机床与自动化加工技术 2023年10期
陈子欢,王永青
(大连理工大学机械工程学院,大连 116024)
0 引言
伺服驱动系统在数控机床、工业机器人和伺服压力机等众多机电一体化设备上有重要的应用,且在高速、高精度、小型化、集成化和网络化等性能指标有日益严苛的需求[1-3]。单惯量伺服驱动系统,是描述伺服驱动系统速度环和位置环的一种重要基本动力学模型,单惯量伺服驱动系统的机械参数辨识,可为更复杂系统的参数辨识提供理论依据。伺服驱动系统作为关键执行部件,其控制器参数整定受机械参数变化的影响,因而伺服驱动系统能否有效进行参数辨识是系统控制的重要前提[4],故有必要对单惯量伺服驱动系统参数辨识进行进一步研究。
选用合适的数学模型是系统参数辨识有效的前提[5]。传统的传递函数模型,适用于单输入单输出系统辨识,而不便于多输入或多输出系统辨识;初始状态选取局限于零状态;只能体现系统的外部特性,而不便于获知系统的内部状态。状态空间模型因能直接观察系统内部状态;初始状态选取不受限;实矩阵方程形式便于算法实现;并且能辨识含有两个及以上时变参数的系统;适用于多输入或多输出系统的参数辨识,而单惯量伺服驱动系统就是单输入两输出系统。单惯量伺服驱动系统的参数辨识,目前多集中于系统的定常参数或某单一时变参数的辨识,在这些方面,已有不少可喜的进展[6-8]。然而两个及以上时变参数是在伺服驱动系统中贴近实际应用的复杂工况[9],对伺服驱动系统两个及以上时变参数的辨识是亟待解决的问题。
基于状态空间模型的最小二乘参数辨识,对其他系统的定常参数辨识已有成功应用[10-11],然而最小二乘法对两个及以上时变参数进行跟踪时辨识精度较低,故最小二乘不适用于该工况的系统辨识。Hopfield神经网络[12]是一个由非线性元件构成的全连接型单层反馈系统,可由交织的电子线路和电子元件来描述,该网络的设计结合了能量函数的研究方法,能达到稳定状态,该网络算法具有结构简单、稳定性好、跟踪速度快等优点,能够应用于含有两个及以上时变参数的系统辨识。
本文基于状态空间方程,对单惯量伺服驱动系统,进行转动惯量和阻尼两个时变参数的辨识研究。分别运用最小二乘法和Hopfield神经网络算法,对该系统参数辨识进行仿真对比实验,对两算法的辨识结果进行评价。
1 单惯量伺服驱动系统模型
伺服驱动系统由电流环、速度环和位置环实现三环闭环控制。通常而言,电流环带宽远大于速度环带宽,故电流环可简化为1处理,这样系统模型里只需考虑速度环和位置环即可。
理想状态下,在伺服驱动系统中的一切传动机构可视为刚体,在力矩传递时不存在任何弹性形变,这时可取消从驱动端到负载端的传动机构,传动链长度视为0,全部机械装置可简化到同一个转动惯量体,直接由电磁转矩驱动,从而获得单惯量系统动力学模型,如图1所示。
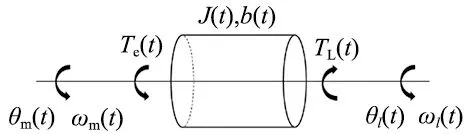
图1 单惯量伺服驱动系统动力学模型简图
单惯量阻尼体具有两时变参数:转动惯量J(t)和阻尼b(t)。单惯量体受驱动端的电磁转矩Te(t)和负载端的负载转矩TL(t)的共同作用,产生相等的电机速度ωm(t)和ωL(t)。该系统可用如下微分方程来描述:
(1)
将旋转角度θm(t)和电机速度ωm(t)分别设为状态x1和x2,得到状态向量x=[x1x2]T,并设定控制输入ue=Te(t),非控制输入uL=TL(t),将式(1)化为状态空间方程可得:
(2)
式(2)可简记为以下方程:
(3)
式中:A(t)为2×2系统矩阵,B(t)为2×1控制输入阵,C(t)为2×1非控制输入阵。
因式(3)中C(t)=-B(t),且负载端非控制输入uL在通常情况下可视为常值,故可对控制输入ue和非控制输入uL进行合并,简记新的等效控制输入u=ue-uL,此时式(2)和式(3)可简化为:
(4)
(5)
这样,单惯量伺服驱动系统,可从两输入两输出系统,转化为单输入两输出系统处理。
2 辨识算法
2.1 最小二乘辨识算法
因单输入多输出的单惯量伺服驱动系统,是多输入多输出系统的特例,故本节所述最小二乘法辨识过程,以更一般的多输入多输出的系统为例,系统状态空间形如下式:
(6)
为综合考虑最小二乘法对时变参数的跟踪能力,需对一段时间内的每个时刻都进行一次最小二乘辨识,在任一采样时刻,取最近较小一段时间的样本数据,则式(6)中A(t)和B(t)可近似看作定常矩阵,即A(t)≈A,B(t)≈B,此时式(6)可写为以下定常状态空间方程:
(7)
运用最小二乘法,首先需将式(7)连续状态空间化为离散差分方程形式,用k表示样本时间序数,T表示单位样本时间间隔,则将式(7)化为离散差分方程形式可得:
x(k)-G(T)x(k-1)=H(T)u(k-1)
(8)


(9)
令样本时间序数k=1~N,将G(T)和H(T)的第j行分别记为Gj(T)和Hj(T),x(k)和u(k)对应记为xj(k)和uj(k),则有:
θj=[-Gj(T)Hj(T)]T
(10)
(11)
由式(10)和式(11)可得:
xj=Hjθj
(12)
此时用最小二乘法可得θj的一致估计和无偏估计,即:
(13)

2.2 Hopfield神经网络辨识算法
采用Hopfield神经网络对单惯量二阶时变系统进行参数辨识。
因式(4)中待辨识的参数J(t)和b(t)为时变参数,则式(5)中系统矩阵A(t)和输入矩阵B(t)均为时变矩阵,然后取P(t)=[0 1 0 -b(t)/J(t) 0 1/J(t)]T。
则该系统时变参数辨识过程就是向量P(t)的辨识过程。
用于辨识的可调系统为:
(14)

由式(5)和式(14)得:
(15)

(16)
式中:取E=E1+E2,其中E1取E的前5项,E2取E的第6、7项,并将ρ1=ρ3=ρ5=0及ρ2=1代入,则有:

(17)
(18)
Hopfield网络能量函数趋于极小的过程,就是估计矩阵F(t)和G(t)收敛于实际矩阵A(t)和B(t)的过程。通过构建一个具体的Hopfield网络,取网络的输出为辨识结果ρ(t),可进行参数辨识。
Hopfield网络第i个神经元的动态微分方程为:
(19)
式中:网络激活函数取为g(U)=φ(1-e-λ|U|)sgn(U),常数φ>0,λ>0。
假定Hopfield网络的神经元由理想放大器构成,即Ri→∞,同时取Ci=1,并取网络的输出为辨识结果ρ(t),则Hopfield网络的动态微分方程变为:

(20)
Hopfield网络的标准能量函数为:
(21)
由于Ri→∞,则:
(22)
利用Hopfield网络进行时变参数辨识时,取所定义的辨识误差函数与Hopfield网络标准能量函数相等,即E=EN。
对比式(17)、式(18)和式(22),可将网络的连接权值表示为:
(23)
将式(23)的W和I代入式(20),可得到稳定的Ui,通过激活函数g(·),可得到网络最终辨识结果的输出为:
F=g(U1),G=g(U2)
(24)
Hopfield网络的输出对应待辨识参数,由于以下两点,Hopfield网络只能实现时变参数的近似辨识:
②由于连接权值W和I与时间有关,为了保证dEN/dt为负,需要使(dg-1(ρi)/dρi)·(dρi/dt)2足够大,设计时应取合适的φ和λ。
3 单惯量系统参数辨识仿真实验
对时变参数的单惯量系统,基于MATLAB程序及其Simulink仿真模块,按2.1和2.2节所述进行最小二乘和Hopfield神经网络参数辨识仿真对比实验。
在式(5)所示状态空间方程里,假定转动惯量J(t)和阻尼b(t)均为时变参数,且J(t)=5×10-3(1+0.1sin(0.2πt)) kg·m2,b(t)=3×10-2(1+0.5sin(0.3πt)) N·m·s/rad,则时变参数J(t)和b(t)相对各自平均值的变化幅度分别为10%和50%;输入信号u=2sin(30πt) N·m;采样周期设为0.1 s。
为保证最小二乘的参数跟踪效果和辨识精度,对仿真一段时间后任一采样时刻,时间序列里取最近10组数据进行最小二乘参数辨识。
Hopfield网络权值W和I初值取0,取P=[0 1 0 -b(t)/J(t) 0 1/J(t)]T,φ=500,λ=10。
在Simulink里搭建的Hopfield网络辨识仿真主程序如图2所示。
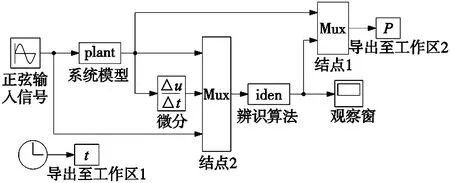
图2 单惯量时变系统
由时变参数J(t)和b(t)的辨识曲线图3a和图3b可知,仿真时间在20 s后,时变参数J(t)和b(t)的两算法辨识均趋于稳定,其中Hopfield网络辨识曲线明显比最小二乘辨识更接近于理想曲线。
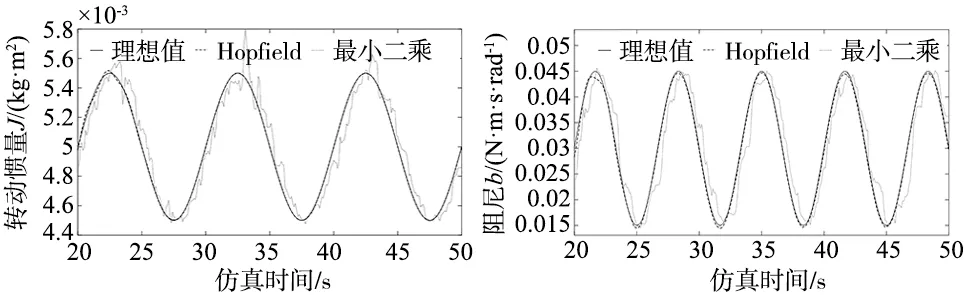
(a) J(t)辨识 (b) b(t)辨识图3 转动惯量J(t)和阻尼b(t)时变参数辨识曲线
由J(t)和b(t)时变参数辨识的相对误差曲线图4a和图4b可知,辨识结果稳定后,转动惯量J(t)的Hopfield网络辨识相对误差明显趋于0,而最小二乘辨识的相对误差大致在0~6%之间波动;阻尼b(t)的Hopfield网络辨识相对误差大致在0~5%之间波动,而最小二乘辨识的相对误差大致在0~40%之间波动。因此,虽然两算法辨识相对误差均小于J(t)和b(t)时变参数理想值变化幅度10%和50%,但Hopfield网络辨识双时变参数效果远好于最小二乘辨识。
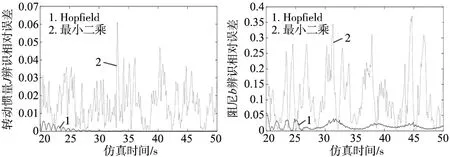
(a) J(t)辨识相对误差 (b) b(t)辨识相对误差图4 转动惯量J(t)和阻尼b(t)时变参数辨识相对误差曲线
4 结论
本文分别运用最小二乘法和Hopfield神经网络算法,对含有双时变参数的单惯量伺服驱动系统进行辨识仿真对比实验。结果表明,两算法辨识均能跟踪时变参数,但Hopfield网络辨识相对误差远小于最小二乘的结果,故Hopfield网络为含有两个时变参数的单惯量系统辨识提供可行性。本文的研究成果,对更复杂的伺服驱动系统参数辨识具有借鉴意义。
猜你喜欢
现代电力(2022年2期)2022-05-23 12:46:16
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
智富时代(2017年4期)2017-04-27 17:08:47
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
中国铁道科学(2015年4期)2015-06-21 06:46:08
振动、测试与诊断(2014年4期)2014-03-01 01:14:01