基于PSO 算法的摆线钢球减速器优化研究∗
2023-10-20 08:24:42倪天宇平雪良
计算机与数字工程 2023年7期
倪天宇 平雪良
(江南大学机械工程学院 无锡 214122)
1 引言
作为随着技术发展且为满足高精度等相关应用需求而研发的一种精密钢球行星传动,摆线钢球行星减速器打破了常规减速器的设计思路,摒弃了将齿轮用作传动元素的常规设计模式,开创性地选用了钢球,通过它实现动力的实时化、快速化传输,减少摩擦力,减弱噪音,另外,因机构中不含有齿轮,所以不会形成背隙。在输出端,根据实际情况灵活合理地规划和安装间隙调节装置,此举能够令行星传动过程中理论上不会产生回差,有助于运动精度进一步提升。正是凭借着此优势,该机构在备受业内人士青睐,在精密机械的传动装置中得到大力推广和积极应用。
文献[1~2]在对现有相关研究成果进行梳理分析后,从构成、运动原理等多角度入手,对摆线钢球行星传动展开了广泛深入地分析,获得了较为一系列丰硕的研究成果。文献[3]将目光聚焦于双摆线钢球行星传动,通过各种相关技术和方法对其设计方法展开了细致研究,最终创建了性能可靠、操作便捷的辅助设计软件。文献[4~5]为全面准确地把握摆线钢球行星传动性,在借鉴前人研究成果的前提下,对其在全载荷下对应的性能展开了深入细致地分析,最后表示可采用基于陶瓷球的设计计划。文献[6]着重对摆线槽的设计、数控加工方法等内容展开了全面深入地分析。文献[7]分别从结构、运动方式等多个层面出发,对摆线钢球行星传动展开了全方位、深层次地探讨和分析。
多级摆线钢球行星传动在实际应用中表现出突出优势,比如传动比区间大,只使用少量的齿数既能够非常简便容易地提高传动比[8]。处于内外摆线槽时,钢球基本上保持着完全滚动的状态,不会产生较大的滑动摩擦力,结构布设紧密合理,小型化,一般来讲,其大小主要由钢球规格、摆线盘厚度等相关因素决定。不过需要注意到,如果前后级结构设计不合理、不科学,容易令机构内形成封闭功率,不利于构件均匀受力,甚至会导致构件磨损,导致传动效率变小[9]。因此,对摆线钢球行星传动机构优化设计显得尤为的重要。
本文为了提高摆线钢球行星减速器的运行效率及体积优化,运用粒子群智能算法以体积和转化机构效率高为目标函数,展开科学合理地结构优化设计。在进行反复计算后,不仅确定了优化参数,也明确了体积以及效率值这两个重要函数,为摆线钢球行星减速器结构设计和性能研究提供参考。
2 摆线钢球行星传动的原理
关于摆线钢球行星减速器结构可参考下图,能够此图能够清晰直观地了解到,它包含了两级啮合副组,一级啮合副由中心盘2、行星盘4 及钢球3 组成;第二级啮合减速啮合副由中心盘6、行星盘4组成。
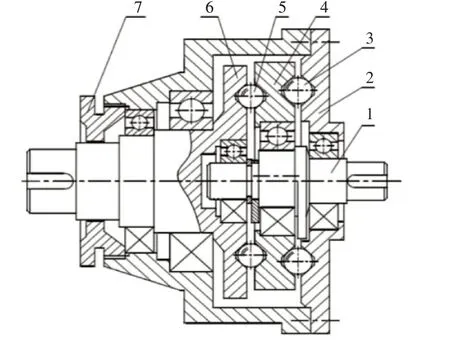
图1 摆线钢球减速器结构图
由上图可知,摆线钢球行星减速器的运行机制其实并不复杂,简单来讲,当主动偏心轴1 以恒定速度旋转时,行星盘4 围绕运动,在右端闭合圆形凹槽,中心盘2作用于钢球3,从而控制闭合圆形凹槽的阻力。受此影响,行星盘4 的转动速度有效降低,此时,第一次减速运动结束。随着主动偏心轴1的继续运动,行星盘4以此轴为中心公转,在自转与公转的协同影响下,行星盘4 实现了精准高效地合成运动,带动钢球5进行运动,继而带动输出盘6以非常小的角速度运行,此时,第二次减速运动结束[10]。
3 摆线钢球行星结构优化模型
3.1 目标函数
在整个传动结构体系中,无论是行星盘,还是中心盘,它们均是不可或缺的重要组成,其结构参数设置的是否准确合理将直接关系到整个传动装置的体积及运行效率。所以,本文在满足约束条件下,以体积、效率为目标函数,采取各种合适的方法进行了科学合理地结构参数优化设计,由此保证选取的参数最优。
1)体积目标函数
减速器的径向尺寸主要取决于两大因素:一是中心盘的规格,二是行星盘运动的最大回转半径,另外,其轴向尺寸也主要取决于两大因素,分别是行星盘、中心盘的宽度。关于摆线钢球减速器的尺寸详情可参考图2。

图2 摆线钢球减速器几何尺寸参数图
传动机构的体积可近似由式(1)计算:
在上面的传动机构体积的计算公式中,V1表示上一级啮合运动中啮合副的总体积(mm3),V2表示输出恒星盘左端面至行星盘左端面的体积(mm3),Ra表示行星盘的最大惯性半径(mm),Rb表示下一级啮合副恒星盘的外圆直径(mm),B1表示上一级啮合副的总体的宽度(mm),B2表示输出盘左端面至行星盘左端面的距离(mm)。
根据图2将式(1)转化为
2)效率目标函数
由文献[11]减速器的传动效率为
式中,ηa表示齿轮传动效率,ηb表示轴承的传动效率,表示一对滚动轴承的传动效率。
由于,滚动轴承的摩擦损失很小,所以其摩擦功率损失可不予以考虑。一般来讲,转臂轴承的受力比较均匀合理,有助于延长使用周期,其传动效率可取0.98左右。由此能够了解到,该减速器的传动效率的高低主要取决于啮合效率的大小。以输入输出转向相同作为减速器效率分析对象,可得:
在进行优化设计时,无论是哪一个分目标函数值,均应采用合适的方法实施无量纲及等量级处。其中,fa(x)函数中权重系数取1/10100,fb(x)权系数取1/0.60,综合以上所述,经过整合完善后的设计变量的函数为
3.2 约束条件
1)齿数条件约束
在已知传动比i 的情况下,从理论上来讲,ZQ、Z'Q存在无穷多组合,不过在实践中,钢球数并非任意值均可,只可取整数。另外,需要注意ZQ、Z'Q的取值,切勿选取较小的值[12],其主要原因在于若钢球数过少,机构受力会在原来基础上明显增加,在实际应用中,钢球数量往往至少要采用五个,即:
2)钢球间不干涉条件
各钢球在摆线槽内各自循环滚动,只有各钢球之间留有间隙,才能保证各钢球之间不发生干涉碰撞。前后级啮合副钢球半径应满足的条件为
3)啮合效率约束
摆线槽槽型角β的大小直接关系到其轴截面的齿廓。如果其角度值过小,那么钢球或许会被夹紧,抑或是由于楔死而无法灵活自如地运动。但若其值过大,会使得啮合时啮合副在径向上的分力锐减,降低啮合的总体效率。关于β角,最好按照下式进行取值:
短幅系数K 是一个非常关键的参数,其取值是否合理不仅关系到摆线齿廓啮合特性,也会对其几何特性产生较为深刻的影响,一般来讲,若K 取值过低,即令摆线齿廓的曲率半径变大,造成啮合副中作用力变大,继而导致低减速器的承载性能有所减弱。反之,若其取值过高,会使得摆线齿廓的曲率半径降低,此时,齿廓出现顶切的可能性比较大,同时会导致齿面接触应力变大,不利于提高承载能力。根据实践和经验,短幅系数K的取值范围为
4 模型优化求解
4.1 PSO算法
粒子群优化算法是当前应用比较广泛的一种进化计算策略,它是典型的基于群体的算法,结合对环境适应状况,即我们通常所讲的适应度,群体内个体均逐步迁移至更优的位置[13]。D 维空间中,有N 个粒子科学合理地布设空间粒子位置。若粒子i 位置为xi=(xi1,xi2,…,xiD),将其套入适应度函数f(xi)之中,快速准确地求解出适应值,第i 粒子速度表示为vi=(vi1,vi2,…,viD),粒子i 经过的最优空间区域pbesti=(pi1,pi2,…,piD) ,种群经过的最优空间区域…gbesti=(g1,g2,...,gD)。第d(1 ≤d≤D)维的位置区间一般为[Xmin,d,Xmax,d],速度区间为[-Vmin,d,Vmax,d],换言之,在进行迭代处理的过程中,如果Vid,Xid大于边界值,那么此维的速度或空间区域即会约束为其速度或位置的极大值[14]。粒子i的第d维速度更新公式:
式中:c1,c2为加速度常数,调节学习最大步长;r1,r2为两个随机函数,取值范围[0,1],以增加搜索随机性;w:惯性权重,非负数,调节对解空间的搜索范围。粒子i的第d维位置更新公式见式(11),其中表示第k次迭代粒子i飞行速度矢量的第d维分量;表示第k次迭代粒子i位置矢量第d维分量[15];
PSO 算法在实际应用过程中,通常会借助线性递减策略,科学合理地调整惯性权重,由于无法准确客观地反映粒子群非线性,所以,算法搜索方向的启发性较弱。客观来讲,早期惯性权重值往往可以选取便于实现全局搜索的偏大值,不过这会导致算法工作量增大,投入增多,也会造成收敛速度降低;后期时期可以获取能够促进算法收敛的较小值,不过得到局部最优解的可能性比较大[16]。依托随机数的特性科学合理地改变惯性权值,便于后期获得更符合要求的值。
本文提出一种基于Levy 随机步长的PSO 随机惯性权值w 进行优化。Levy随机飞行步长的生成,其可以分为三部分来描述:
式(12)中参数μ和ϑ满足正态分布要求,β∈[0.3,1.99]。
在式(14)中Γ(z)是gamma 函数,根据Levy 随机飞行步长基本原理,对PSO算法的权值修改为
粒子i的第d维速度更新公式可调整为
4.2 基于改进PSO算法的优化设计分析
多目标优化问题相对较为复杂,现有算法难以实现对各子目标函数的快速化、精准化、全面化比较分析,它们无法实现同步最优,对于当前应用比较广泛的多目标粒子群优化算法来讲,其根本在于通过对各函数间关系的针对化、合理化调节,令其尽量均满足设计要求。
在改进的PSO算法中,相较于适应度较大的个体,较低的个体明显更胜一筹。在选取适应度函数时,要着重考虑持续性、单值等特征。本文在充分考虑被研究对象特性的基础上,将体积、效率高定义为目标函数,实现对机构啮合效率最小化问题的正确求解。所以,关于被研究对象的优化模型可参考下式,其中i=1,…,m;j=1,2,…,n。
基于外点惩罚函数法确定两个目标函数的适应度评价函数:
r表示惩罚因子,c表示递增系数。
在Matlab 中应用PSO 算法对上述适应度评价函数进行优化求解,将会得到最优化的摆线钢球行星减速器机械结构和效率配置参数。
5 仿真分析与实际试验验证
5.1 实验环境
本文仿真实验环境配置如表1所示。
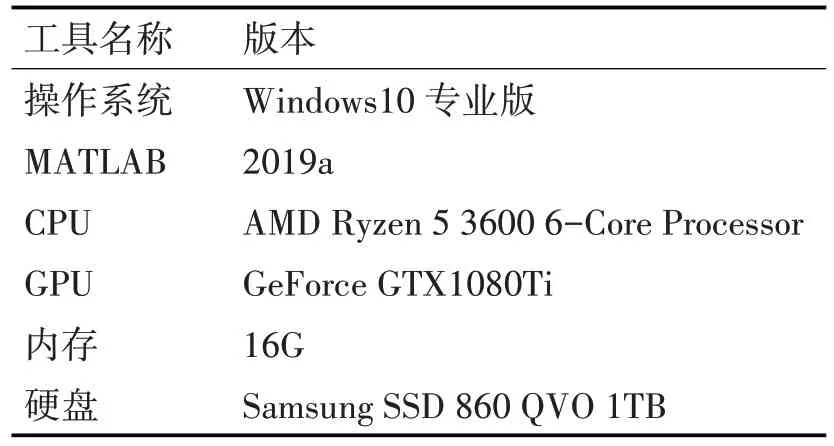
表1 实验配置表
5.2 仿真参数
假设样机的输入功率为P=0.6KW,输入转速n=1000r/min,传动比i=70。取∆1=2mm,∆2=4mm,∆3=5mm,△=3mm,t2=0.65r′Q。减速器其他原始数据如表2所示。
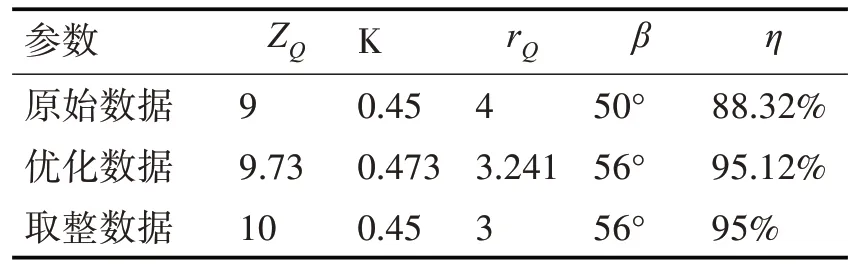
表2 PSO模型优化结果
在采用PSO算法进行分析处理时,仿真参数如下设定:学习因子c1=c2=0.3,种群中的个体总数为40。本文在综合考虑各方面因素之后决定,最大迭代次数取300 次,关于惯性权重w,可通过式(15)进行准确合理地确定。应用Matlab 对模型进行仿真分析。经过300 次迭代后,基于PSO 算法的摆线钢球行星减速器机械结构评价函数适应度曲线为如图3所示。
从图中可以看出当模型迭代超过60 次时适应度值达到最优状态。可以看出模型的收敛速度是相当快的,也较为稳定。最终得出的摆线钢球行星减速器机械结构和效率优化曲线如图4所示。
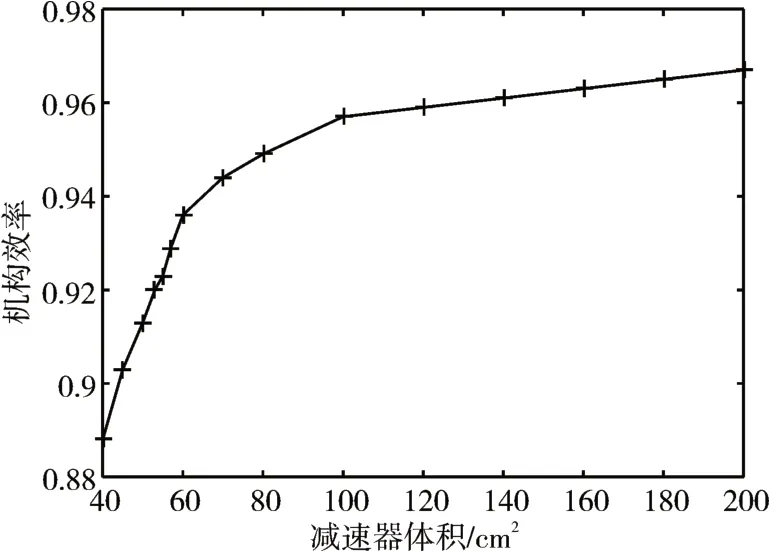
图4 结构和效率优化曲线
从上图曲线中可以看出,摆线钢球行星减速器机械结构运行效率与体积成非线性增长。当体积达到120cm3时,减速器体积变大,效率并未大幅提高。在非劣解集中,按照特定标准和要求选择一组优化参数,求解减速器的体积及转化机构啮合效率,将其结果和初始信息相对比,具体可参考表2。
5.3 试验验证
本文采用某公司在研的型号为BR160SSBR160SH 减速器为研究对象,对上述摆线钢球结构优化模型进行验证分析。并在仿真实验分析的基础上加工了三组减速器试验样机,测试样机零件图如图5所示。
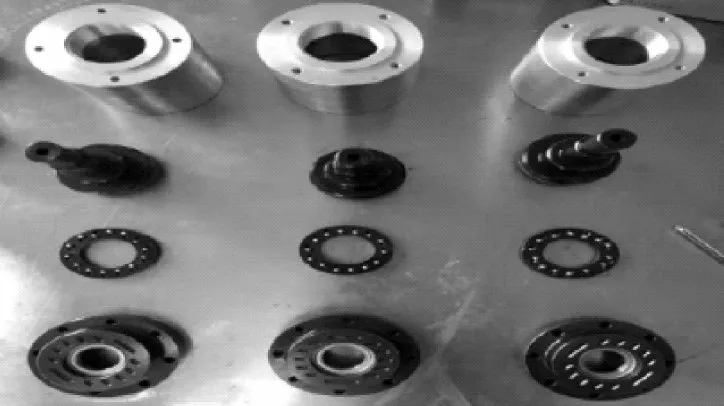
图5 测试样机零件图
在输入功率和传动比不变的情况下,取测试结果最优的一组,测试结果如表3所示。

表3 测试结果分析
根据实际情况,试验样机体积相较于初始减速器体积,优化后降低了13%,效率则明显提升,由最初的86.73%转变为93.84%。仿真结果与实际试验验证结果基本一致。
6 结语
本文根据以摆线钢球行星减速器结构和运行效率为优化目标。对钢球行星减速器原理分析的基础上,提出结构和效率优化的目标函数,并根据实际钢球行星减速器运行情况提出约束条件。根据想要达到的优化目标和约束条件,应用PSO算法进行优化求解。根据仿真模拟的优化结果和试验验证表明,应尽量使偏心距的值减小,以减小体积。同时,在允许的范围内减小K 值,建议K 值取0.45~0.5之间。
猜你喜欢
汽车实用技术(2021年23期)2022-01-05 11:21:42
昆钢科技(2021年2期)2021-07-22 07:46:54
防爆电机(2021年1期)2021-03-29 03:02:50
哈尔滨轴承(2020年4期)2020-03-17 08:13:52
铁道通信信号(2019年10期)2019-11-25 09:40:54
军事文摘(2018年24期)2018-12-26 00:57:40
设备管理与维修(2018年2期)2018-02-09 08:34:44
制造技术与机床(2017年3期)2017-06-23 08:11:51
现代商贸工业(2016年35期)2016-04-09 06:59:58
河南科技(2014年15期)2014-02-27 14:12:33