适用于某雷达的五桥臂逆变器双永磁电机控制∗
2023-10-20 03:52:20张甍
舰船电子工程 2023年7期
张 甍
(1.中国电子科技集团公司第二十研究所 西安 710000)(2.中国电子科技集团公司第二十研究所高端电子装备工业设计中心 西安 710000)
1 引言
随着工业自动化的不断发展,在电动汽车、风力发电、采矿业、军工、航天等领域需要对两台电机进行协同控制,两电机协同控制成为最近几年的研究热点[1~2]。在传统工业应用当中,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)通常由半导体开关器件IGBT构成的电压型逆变器来驱动[3~5]。在某新型跟踪雷达中,俯仰和方位逆变器使用两块IPM 来驱动永磁同步电机,从而达到方位和俯仰电机协同控制的目的,每块IPM 中都包含有六个IGBT 开关管。研究表明,有接近一半的逆变器故障是因为开关管损坏引起的[6~7]。当传统六桥臂逆变器的一相桥臂发生故障时,五桥臂电压源逆变器(the five-leg voltage source inverter,FL-VSI)作为一种很好的容错控制方案,可以独立地控制两台永磁同步电机,即在方位和俯仰电机两个驱动器中某一桥臂发生故障时,利用剩下的五个桥臂依然能够控制两台电机正常运转,提高了系统可靠性[8~13]。
由于五桥臂电压源逆变器具有公共桥臂,为实现独立控制两台电机,传统空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)方法不再适用[14~15]。文献[16~17]中将五桥臂电压源逆变器的一个控制周期分为两个半周期,在前半周期,第一台电机进行空间矢量脉宽调制,第二台电机进行零矢量调制;在后半周期,第二台电机进行空间矢量脉宽调制,第一台电机进行零矢量调制,此方法即为传统的半周期调制方法。半周期调制方法避免了两台电机同时控制时公共桥臂开关器件状态不同而引起的冲突,算法简单。但是每台电机在一个控制周期内都会有半个周期处于零电压矢量控制状态,因此电机的电压利用率最大只能达到直流母线电压的一半。
针对传统半周期调制策略存在每台电机有效电压矢量作用时间最长为控制周期的一半的问题,提出一种占空比校正策略,在不增加任何硬件电路且公共桥臂脉冲宽度满足两个电机在一个控制周期内要求的前提下,首先对两台电机有效矢量进行合理分配,提高了电机最大有效矢量作用时间,然后再均匀分配零矢量,从而在实现双电机容错控制的前提下,进而提高了两台电机直流母线电压利用率,达到电机扩速的目的,通过仿真验证了该控制方法的正确性和有效性。
2 五桥臂逆变器传统半周期调制策略
PMSM1 和PMSM2 分别用下标i(i=1,2)表示,五桥臂电压源逆变器将传统双电机并联控制系统的开关管数量从十二个减少到十个,其中两台电机共用一个公共桥臂,组成五桥臂电压源逆变器,其拓扑结构如图1所示。

图1 五桥臂电压源逆变器的拓扑结构
图中,A、B、C为第一台逆变器的三相桥臂,D、E、A 为第二台逆变器的三相桥臂。其中a1、b1、c1为第一台逆变器的三相输出端,a2、b2、c2为第二台逆变器的三相输出端,A 桥臂为五桥臂电压源逆变器的公共桥臂,供两台逆变器同时使用。
两台逆变器的电压矢量合成如图2 所示,每个电动机的电压矢量包括6个基本有效矢量和2个零电压矢量。图中PMSM1 和PMSM2 的定子电压参考矢量为u1ref和u2ref,参考电压相位角为θ1和θ2,并且分别以角速度w1和w2旋转。

图2 两电机参考电压矢量图
为了保证在任意时刻公共桥臂c1、c2 的占空比相等,半周期调制方法被提出,该方法将一个控制周期分为两个等长的半周期,在前半个控制周期内,逆变器1 输出PMSM1 所需的电压矢量,D,E 桥臂的开关状态与A桥臂的开关状态一致,即逆变器2 的输出矢量为零矢量,在后半个控制周期内,逆变器2 输出PMSM2 所需的电压矢量,并且C 和B 桥臂的开关状态与A桥臂的开关状态一致,即逆变器1 的输出矢量为零矢量。当PMSM1 的参考电压矢量位于第Ⅰ扇区,PMSM2 的电压参考矢量位于第Ⅲ扇区时,通过SVPWM 调制可得五桥臂电压源逆变器五个桥臂的PWM波形如图3所示。
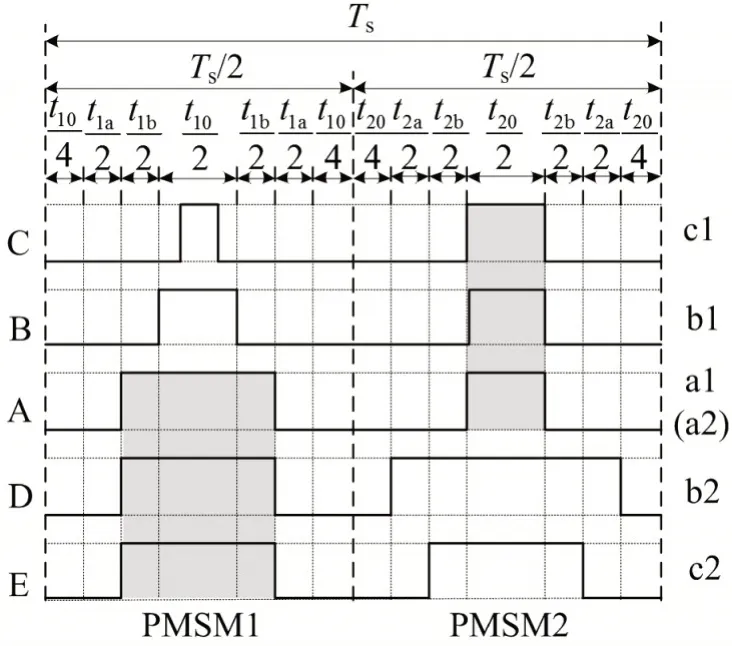
图3 两电机的SVPWM驱动波形
在半周期调制方法中,每台电机的有效电压矢量作用的最长时间为控制周期的一半,即每台电机的最大转速只能达到额定转速的一半。直流母线电压利用率较低。
3 五桥臂电压源逆变器占空比校正
五桥臂电压源逆变器调制策略的重点为实现公共桥臂解耦的基础上,实现电压利用率的提高,通过理论分析得出采用半周期调制方法时,电机的最大转速调节范围只能达到额定转速的50%。本文提出了一种五桥臂逆变器占空比整体校正方法,该方法对两台电机的有效矢量进行合理分配,提高电机的最大有效矢量作用时间,再对电机的零矢量进行分配,该方法在实现五桥臂逆变器公共桥臂解耦的同时,扩展了电机转速调节范围,并且可以实现一台电机在较低转速运行时,另外一台电机运行在较高转速。
在本方法中,令PMSM1 和PMSM2 的A 相桥臂为公共桥臂,且将PMSM1 在一个矢量控制周期内各个桥臂开关器件的有效作用时间分别设为Ta1,Tb1和Tc1;将PMSM2在一个矢量控制周期内各个桥臂开关器件的有效作用时间分别设为Ta2,Tb2和Tc2,与之对应的各个桥臂占空比为
由式(1)可以得知PMSM1 在一个控制周期内三相占空比分别为δa1、δb1、δc1,PMSM2在一个控制周期内三相占空比分别为δa2、δb2、δc2,令电机1、2 三相占空比最小值分别为δmin1、δmin2,对应的零矢量u17(1,1,1)和u27(1,1,1)的作用时间为δ1(1,1,1)和δ2(1,1,1)。在电机进行控制的时候,零矢量的作用并不会改变电机的运行状态,所以两台电机在正常运行时,每台电机都可以增加或者减少一个零电压矢量的作用时间,如果对u17(1,1,1)和u27(1,1,1)进行合理的优化,则可以在满足两台电机公共桥臂状态一致的情况下,增加电机有效电压矢量的作用时间,从而拓宽电机的调速范围。
两电机A相占空比的差值为
此时第一台电机A 相占空比的最小值和最大值分别为
此时第二台电机A 相占空比的最小值和最大值分别为
通过A 相占空比比较可得,两台电机占空比可以调节的最大范围为
五桥臂电压源逆变器占空比校正调制策略流程图如图4所示。

图4 占空比校正
占空比优化具体步骤:第一步,将电机1、2 的占空比分别减去三相占空比对应的最小值,即电机1、2对应的有效占空比为
第二步,求出此时电机1 和电机2 对应的A 相占空比δa10和δa20的差值;并且计算出电机1和电机2最大可调节占空比的值如下式:
式中,δd0为占空比δa10和δa20的差值。
式中,δm1、δm2为电机1 和电机2 可调节最大占空比;δmax1=max(δa10,δb10,δc10),δmax2=max(δa20,δb20,δc20)。
第三步,当电机1 和电机2 的A 相占空比的差值大于零的时候,将电机2 对应的最大可调节占空比和电机1、电机2 的A 相占空比的差值作比较,如果最大可调节范围大于两台电机A 相占空比的差值,则给电机2 的三相占空比分别加上两台电机的A 相占空比的差值,五相桥臂占空比如式(9);如果最大可调节范围小于两台电机A相占空比的差值,则超出最大可调节范围,为了保护硬件电路,此时两台电机进行半周期调制,并且立即结束。
同理,当电机1 和电机2 的A 相占空比的差值小于零的时候,将电机1 对应的最大可调节占空比和电机1 和电机2 的A 相占空比的差值作比较,如果最大可调节范围大于两台电机A 相占空比的差值,则给电机1 的三相占空比分别加上两台电机的A 相占空比的差值,五相桥臂占空比如式(10);如果最大可调节范围小于两台电机A 相占空比的差值,则超出最大可调节范围,此时两台电机进行半周期调制。
当电机1和电机2的A 相占空比的差值等于零的时候,即此时电机1 的A 相占空比等于电机2 的A 相占空比,直接进行调制,五相桥臂占空比如式(11)。
第四步,为了减小电流谐波,五桥臂电压源逆变器的五相PWM信号在控制周期内应该对称居中分布,即将有效时间平均分配给五相零电压矢量,计算方法如式(12)。
式中,δmax=max(δA1,δB1,δC1,δD1,δE1)。
本文提出的新型五桥臂半周期占空比校正策略,计算方法简单,可以实现公共桥臂占空比校正,并且当一台电机运行在较低转速时,另外一台电机有较高的转速调节范围,在军工行业以及对可靠性要求较高的行业具有比较好的应用前景。五桥臂逆变器驱动双电机控制系统框图如图5 所示,采用id=0 的控制方式,速度外环和电压内环均采用PI控制器,两台电机分别产生三相占空比后经过占空比校正方法产生五桥臂逆变器所需的五相占空比。
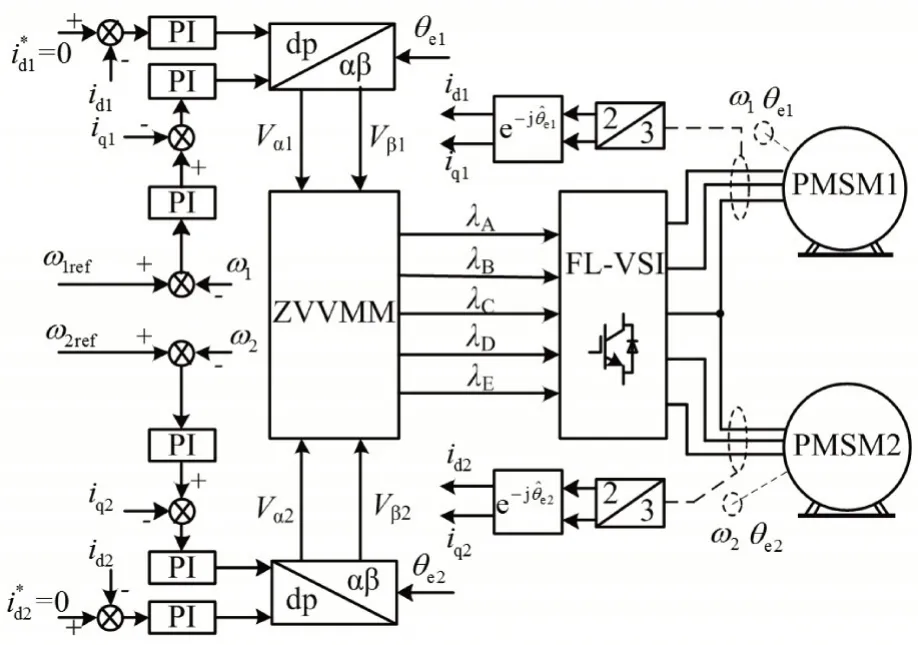
图5 控制系统框图
4 仿真结果分析
为了验证本文提出的五桥臂逆变器双永磁电机占空比校正控制方法的有效性,本节基于MATLAB/Simulink 仿真软件对所提占空比校正方法进行仿真分析,两台电机参数相同,如表1所示。
为了验证理论分析的正确性,本节分别对以下几种工况进行仿真,第一组仿真工况为两台电机均为空载运行,并且PMSM2 以100r/min 的转速运行;PMSM1 的工况为:以1200r/min 的转速启动,在0.3s转速阶跃到2400r/min ,在0.6s 转速阶跃到2900r/min,仿真结果如图6(a)所示。第二组仿真工况为两台电机均为空载运行,并且PMSM1 以1000r/min 的转速启动,在0.3s 转速阶跃到1250r/min,在0.6s 转速阶跃到1500r/min,PMSM2 的工况为:以1000r/min 的转速启动,在0.4s 转速阶跃到1250r/min,在0.7s 转速阶跃到1500r/min,仿真结果如图6(b)所示。
由工况一可以得知,两台电机均空载运行,且PMSM2 保持运行状态不变时,当PMSM1 转速为2900r/min 时,五相占空比几乎等于1;从工况二可以得知,两台电机均空载运行,且当PMSM1 和PMSM2 转速为1500r/min 时,五相占空比几乎等于1;对比半周期调制方法可以得知,当两台电机空载独立运行时,并且其中一台电机运行在低速时,另外一台电机的转速相较于半周期调制方法可以得到明显扩展;当两台电机的转速比较接近额定转速的一半时,校正方法相较于半周期调制方法扩速效果并不明显。
第三组仿真工况为PMSM2 以100r/min 的速度空载运行,PMSM1 的工况:以1200r/min 的转速启动,并且施加4.5Nm 的负载,在0.3s 转速阶跃到2200r/min,在0.6s 转速阶跃到2800r/min,仿真结果如图7(a)所示。第四组仿真工况为:PMSM1 以1000r/min 的转速启动,并且施加4.5Nm 的负载,在0.3s 转速阶跃到1250r/min,在0.6s 转速阶跃到1430r/min,PMSM2 的工况为以1000r/min 的转速启动,并且施加4.5Nm 的负载,在0.4s 转速阶跃到1250r/min,在0.7s 转速阶跃到1430r/min,仿真结果如图7(b)所示。
由工况三可以得出,当PMSM2 运行工况不变,PMSM1 带半载且运行在2800r/min 时,五相占空比接近1;从工况四可以得出,两台电机均带半载运行,且当PMSM1 和PMSM2 转速为1430r/min 时,五相占空比接近1;对比半周期调制方法可得,当两台电机带载独立运行时,并且其中一台电机运行在低速时,另外一台电机的转速相较于半周期调制方法可以得到较大扩展;当两台电机转速比较接近额定转速的一半时,校正方法相较于半周期调制方法扩速效果并不明显。
由仿真分析结果可得:五桥臂逆变器驱动双电机控制系统在采用占空比校正调制策略的时候,可以在缺少一相桥臂的情况下实现两台电机独立控制;且在两台电机运行速度相差较大时,高速电机的运行速度可以得到较大扩展,两电机调速范围如图8阴影部分所示。
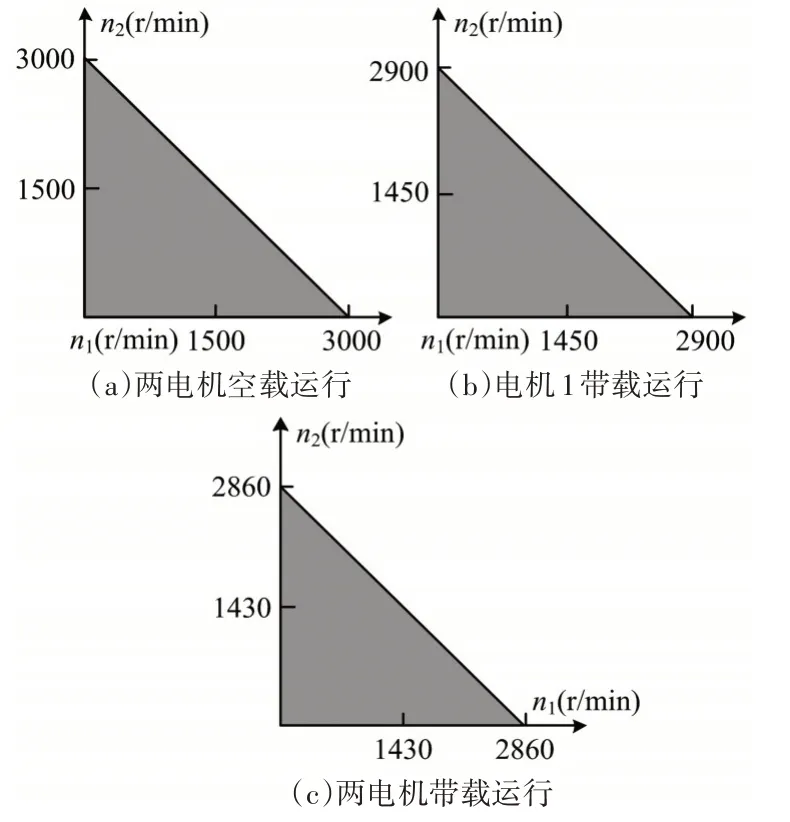
图8 校正调制方法时两电机调速范围
5 结语
五桥臂逆变器作为传统双并联逆变器在一相桥臂发生故障时的容错运行模式,可以独立地控制两台永磁同步电机,提高了系统可靠性。本文针对五桥臂电压源逆变器拓扑结构,对传统半周期调制方法的原理进行详细介绍,针对五桥臂半周期调制方法存在直流母线电压利用率低等问题,提出了一种五桥臂逆变器驱动双永磁同步电机占空比校正控制方法。即五相PWM信号的占空比作为一个整体进行校正,在一个控制周期内,两台电机基本有效电压矢量的有效时间尽可能延长,并且零电压矢量合理对称分布。仿真结果表明,该方法提高了电机直流母线电压利用率从而扩展了两台电机的速度范围,且实现了两台电机独立运行,尤其是在两台电机差速运行时,以较高转速运行的电机,转速范围提升明显,系统的动态性能保持不变。因此,所提出的调制方法有望在其他高可靠性和高性能要求领域有进一步的应用。
猜你喜欢
电工技术学报(2023年16期)2023-08-30 02:44:26
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
高师理科学刊(2020年2期)2020-11-26 06:01:32
天津教育·下(2018年9期)2018-07-13 08:25:47
中国实用神经疾病杂志(2018年9期)2018-05-25 01:01:08
中成药(2017年6期)2017-06-13 07:30:35
电气传动(2015年4期)2015-07-11 06:10:56
中国医药导报(2015年20期)2015-01-11 03:01:27
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11 01:45:54
河南科技(2014年14期)2014-02-27 14:12:06