
一种遥控多功能草方格铺设履带车的设计*
2023-10-18 07:19徐国良徐兴炜李恒征孟炎炎
南方农机 2023年21期
徐国良 , 徐兴炜 , 黎 航 , 李恒征 , 孟炎炎
(1.宿州学院机械与电子工程学院,安徽 宿州 234000;2.宿州学院资源与土木工程学院,安徽 宿州 234000)
铺设草方格治沙是目前沙漠治理中较为成熟的措施,其原理是通过草方格对风沙的固、阻、输、导等作用达到防止风沙侵害的效果[1-4]。为了进一步提高草方格铺设设备的灵活性并突破其应用局限性[5-10],本文设计了一种遥控多功能草方格铺设履带车。该铺设设备以履带作为行走装置,采用远程遥控行进的方式铺设草方格,一次行进可以完成铺草、播种和撒种等工作,能够较好地降低工人工作强度,有效规避工人在陡峭位置铺设草方格时的风险[11-16]。
1 设计方案
1.1 整体结构设计
多功能草方格铺设履带车整体结构图如图1所示。多功能草方格铺设履带车车身结构采用SolidWorks三维软件设计,其整体结构由五个活动单元组成:履带行走单元1、蒲草压刀执行单元2、预制草帘下料单元3、播种单元4 及洒水单元5。履带行走单元1 以减速直流电机作为动力源,将动力直接传递给履带驱动轮,实现履带车的前进、后退和转弯。当履带车驶入铺设地点后,液压升降杆6 将播种单元4放下,洒水单元5 控制开关打开,履带驱动轮转动驱动履带车行进。与此同时,安装在预制草帘下料单元3 的电机转动向蒲草压刀执行单元2 输送草料。蒲草压刀执行单元2 随着履带车的行进周期性地往复下压完成草方格的铺设工作。当铺设完成后在非铺设地面行走时,液压升降杆6 将播种单元4 抬起,洒水单元5 控制开关关闭,预制草帘下料单元3 和蒲草压刀执行单元2 停止工作。履带车控制装置及相关元器件安装于履带车内部。

图1 多功能草方格铺设履带车整体结构示意图
1.2 硬件电路设计
1.2.1 主控系统电路设计
在履带车的控制系统设计中,采用INFINEON/英飞凌SAK-TC264D-40F200W 为主控芯片。为实现履带车的远程遥控功能,控制系统采用串口通信的形式实现无线连接。由于PWM 控制可以较好地实现线性控制,履带车的行进控制和蒲草压刀执行单元的运动控制中均采用了PWM 的控制方法。履带车的主控系统电路图如图2所示。
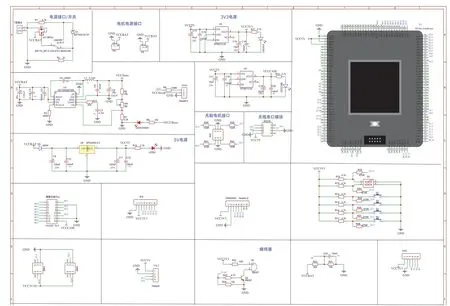
图2 主控电路设计图
1.2.2 驱动电路设计
履带车行走机构和液压系统采用DRV8701 电机驱动板进行驱动控制。通过主控芯片管理电机驱动控制芯片,实现对外部控制信号的响应。电机驱动原理图如图3所示。

图3 电机驱动原理图
1.3 控制程序设计
1.3.1 无线控制程序
由于通过串口通信,因此程序设计时应先设置串口的相关信息,如串口号、波特率以及RX、TX 通信引脚等,然后再进行信息的接收处理。将接收的数据暂存在DAT 里,然后根据输入来判断所需控制的模块。根据需要控制的模块设置每个模块对应的状态标志位,用来检测控制状态。根据所接收的信息进行判断,改变当前标志位状态,从而进行下一步控制。
1.3.2 电机控制程序
检测到相关标志位的改变后,需要进行相关PWM 通道的控制。履带车在设计过程中用到了5 个电机,因此需要5 路PWM 通道和5 路方向通路。为便于履带车后续的升级和拓展,本设计采用通路枚举的方式进行控制,只需一个函数就能控制所有电机甚至更多。提前控制设置好每个电机的通路后,将其带入函数直接控制。部分函数的定义如下:
电机控制与信号获取都处理完后,需要进行配合操作完成最终实际功能。本文将电机控制与状态处理放在中断里进行,这样可以设置中断处理频率,从而改变响应速度。
2 结语
本文针对当前防风固沙草方格铺设设备在使用中的不足,设计了一种遥控多功能草方格铺设履带车,并完成了履带车的结构设计和控制系统设计。控制系统以INFINEON/英飞凌SAK-TC264D-40F200W 为主控芯片,并采用PWM 作为电机的控制算法,设计了履带车的行走、铺草、播种等单元的控制程序。该遥控多功能草方格铺设履带车对于沙丘坡面、腹地绿洲等地带的草方格铺设工作具有较好的应用前景。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05
数学小灵通(1-2年级)(2021年12期)2021-12-30
中国石油石化(2021年8期)2021-03-30
数学小灵通(1-2年级)(2020年12期)2021-01-14
故事作文·低年级(2020年8期)2020-08-17
石油化工建设(2019年6期)2020-01-16
东坡赤壁诗词(2018年6期)2018-12-22
小学生导刊(2018年16期)2018-11-30
小学生导刊(2018年1期)2018-03-15
广东第二课堂·小学(2017年12期)2018-01-05
