
旋耕播种施肥复式作业机测控系统的设计*
2023-10-18 07:19陈彩蓉曹文韬张建峰
南方农机 2023年21期
陈彩蓉 ,曹文韬 ,张建峰 , 胡 飞
(1.南京农业大学工学院,江苏 南京 210031;2.南京农业大学人工智能学院,江苏 南京 210031;3.连云港苏友机械有限公司,江苏 连云港 222000)
0 引言
小麦是世界上种植分布最广、种植面积以及贸易量最大的粮食作物之一,小麦种植占我国农业谷物种植的比重很大。传统旋耕播种机多利用地轮链传动方式驱动排种器,由于受到秸秆或杂草覆盖量、土壤含水率以及土地表面平整度的影响,导致地轮附着力减弱,容易出现地轮打滑等情况;在调节播量时,需要手动调节地轮与排种器转轴之间的传动比,且调节等级有限,难以满足高速、高精度的作业要求。有关学者针对以上问题进行了研究,设计了一些基于编码器测速的精量播种机控制系统,但编码器测速仍然受到地轮打滑的影响,且不同地块、不同土壤条件都有不同的滑移率,不能保证修正参数的普适性,无法避免高速状态下测速轮滑移、胎压变化造成测速不准的情况[1-2]。
随着精细农业的发展,利用新型驱动和智能调速系统取代传统地轮驱动,实现精准智能播种逐渐成为发展趋势[3-6]。播种和施肥是农业生产的重要环节,田间作业时,驾驶员和农机管理人员无法直接观察到种(肥)箱中种子和肥料的余量,难以做到及时加种、加肥。排种管、施肥管作业过程中不可避免地会出现堵塞、漏播等现象,导致播种和施肥作业的质量难以保证,最终影响作物产量和质量。随着信息技术的发展,采用电子设备对复式作业机种肥状态进行实时监测显得极为重要[7-8]。
因此,设计一种基于GPS 卫星测速的旋耕播种施肥复式作业机测控系统,配合复式作业机可以实现下田作业时一次性完成旋耕、播种以及施肥等多道作业工序,实现精量化播种施肥作业,并对播种施肥的各种状态进行实时监测,提高机具作业性能和智能化水平。
1 系统总体方案与硬件设计
旋耕播种施肥复式作业机测控系统主要由微控制器模块、GPS 卫星定位测速模块、人机交互模块、播种施肥模块、监测报警模块、电源模块等构成,测控系统总体结构如图1所示。

图1 系统总体结构图
微控制器模块主要用于接收GPS 卫星定位测速模块发送的作业机车速及位置信息,并根据播种施肥控制算法计算驱动电机转速,同时,接收播种施肥驱动电机通过旋转编码器测得的反馈转速,与人机交互界面进行信息交互。在人机交互界面中,用户可以自行设置亩目标播种(施肥)量,还可以实时显示和存储电机转速、作业机行驶速度、种箱与肥箱的料位是否充足、排种施肥管是否堵塞等,便于用户更好地对系统进行监测。
1.1 微控制器模块
从国内外对播种施肥测控系统的研究中可以看到,目前比较主流的控制器都是以单片机作为控制核心,考虑到本旋耕播种施肥测控系统的实际需求,本文选择意法半导体公司生产的STM32F407IGT6 单片机作为主控制器。它是基于Cortex-M4 内核的32 位微控制器,具有体积小、成本低、功耗低和外设多等特点[9],主要可以实现以下功能:接收GPS 卫星定位测速模块传输的复式作业机的实时位置以及速度信息,发送并接收播种施肥驱动电机转速和反馈转速,实现播种施肥速度随行驶速度的变化自动调节,并与操作者进行实时人机交互。
1.2 GPS卫星定位测速模块
GPS 定位模块在整个系统中起着至关重要的作用,它是获取定位信息的重要组成部分。主要用于定位旋耕播种施肥复式作业机的实时位置信息并测算机器的行驶速度,由于高精度GPS 模块价格昂贵且维护成本较高,难以在农业设备上进行大规模推广应用。系统选用ATGM332D-5N GPS 模块,该模块是基于中科微第四代低功耗GNSS SOC 单芯片AT6558 的,支持GPS、北斗等多种卫星导航系统,ATGM332D-5N 系列模块具有灵敏度高、功耗低、成本低等优点,适合用于车载导航、嵌入式定位设备等场合。通过串口与STM32 微控制器进行通信,传输经纬度等数据到控制器。ATGM332D GPS 模块实物如图2 所示,ATGM332D-5N 系列模块主要技术参数如表1所示。
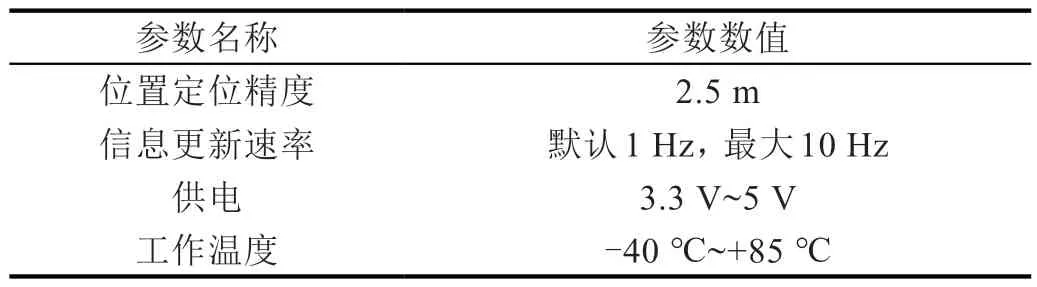
表1 ATGM332D-5N模块主要技术参数表

图2 ATGM332D GPS模块实物
1.3 播种施肥电机驱动模块
播种施肥单元控制电机的选择主要有步进电机、直流电机、伺服电机等。相比之下,直流电机的控制方法不仅简单实用,而且成本较低、性价比高。直流电机主要由定子和转子两部分构成,工作时将直流电源通过电刷接通电枢绕组,使电枢导体有电流流过,电机内部有磁场存在,载流的转子导体将受到电磁力的作用,电磁力作用于转子并使其旋转,从而带动机械运作。该测控系统选用直流电机WeiPu-xx380,电机额定功率为380 W,输入电压为12 V或者24 V,扭矩20 N·m。
电机驱动选用Briter 公司生产的DC-60A 驱动器,性能稳定,模块最大额定电流可达60 A,主要技术参数如表2 所示。测控系统通过对直流电机转速进行闭环控制,从而达到精量播种施肥的目标。

表2 电机驱动器主要技术参数
1.4 监测报警模块
监测报警模块主要有排种施肥管堵塞报警以及种(肥)箱料位报警两部分,当出现排种施肥管堵塞或者种箱、肥箱低于料位阈值时,系统会发出声光报警。
排种施肥管堵塞报警的原理是将光电传感器安装在排种施肥管中,传感器的接收管与发射管相对,当种肥经过时,光电传感器产生高低电压变化,控制器I/O 管脚与传感器信号线相连,实时捕捉电信号并进行相应的处理。当种肥管没有种肥通过时,接收端电信号为1,反之则为0。通过微控制器在种肥管正常播种和堵塞情况下捕获电平高低变化,以确定种肥管是否存在堵塞,从而进行声光报警,堵塞报警系统工作原理如图3 所示。
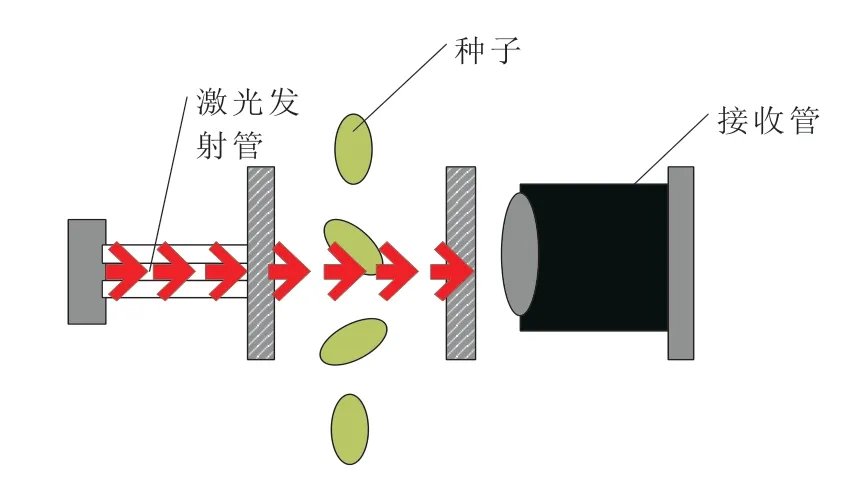
图3 堵塞报警系统原理图
种(肥)箱料位报警工作原理与排种施肥管堵塞报警原理相似,该报警系统将光电传感器安装在排种施肥箱中的一个阈值料位上,当种肥料位高于此位置时,接收端接收来自发射端的光电信号为1,反之则为0 并进行报警,种(肥)箱料位报警系统原理如图4 所示。

图4 种(肥)箱料位报警系统原理图
在拖拉机提升臂附近安装接近开关,作业时,拖拉机提升臂下落,微控制器检测到接近开关信号,控制电机驱动模块进行播种施肥作业;当拖拉机在掉头转弯时,提升臂上升,关闭播种施肥轴电机,可以有效避免种子和肥料的浪费[10]。
2 测控系统软件设计
旋耕播种施肥复式作业机测控系统的软件设计在整个系统中至关重要,决定着整个系统能否正常运行。软件系统主要由主程序、GPS 卫星定位测速模块、播种施肥单元、人机交互界面等模块组成,本系统的软件采用C 语言编写,在Keil5 集成开发环境下进行编译连接。主程序模块主要对来自各个单元的信息进行综合分析计算,作业时对各个部件的运行状态进行综合分析和调整,同时,根据当前播种施肥作业参数和GPS 模块传入的测速信息,实时调整直流无刷电机的转速,实现播种施肥作业速度的自动调节。系统流程图如图5所示。

图5 系统流程图
2.1 卫星定位测速模块
ATGM332D-5N 定位模块采用串口与STM32微控制器进行通信,目前GPS 接收机使用最广泛的协议是NMEA-0183 协议,NMEA-0183 协议曾是美国海用电子设备使用的标准格式,由美国国家海洋电子协会制定,目前已成为GPS 导航设备统一的RTCM 标准协议。NMEA-0183 协议标准可以输出$GPGGA、$GPGSA、$GPGSV、$GPRMC 等多种语句[11],协议数据采用ASCII 字符表示,可使用其中$GPRMC(推荐定位信息)数据获取GPS 模块的实时速度信息。$GPRMC 语句可以满足一般的GPS 动态定位应用要求,该语句中包括经纬度、速度、时间和磁偏角等字段,在接收到这些数据后,通过一定的算法对含有经纬度数据的语句进行解析,即可获得所需的位置、速度等信息[12]。$GPRMC数据参数如表3所示,GPS采集程序流程如图6 所示。
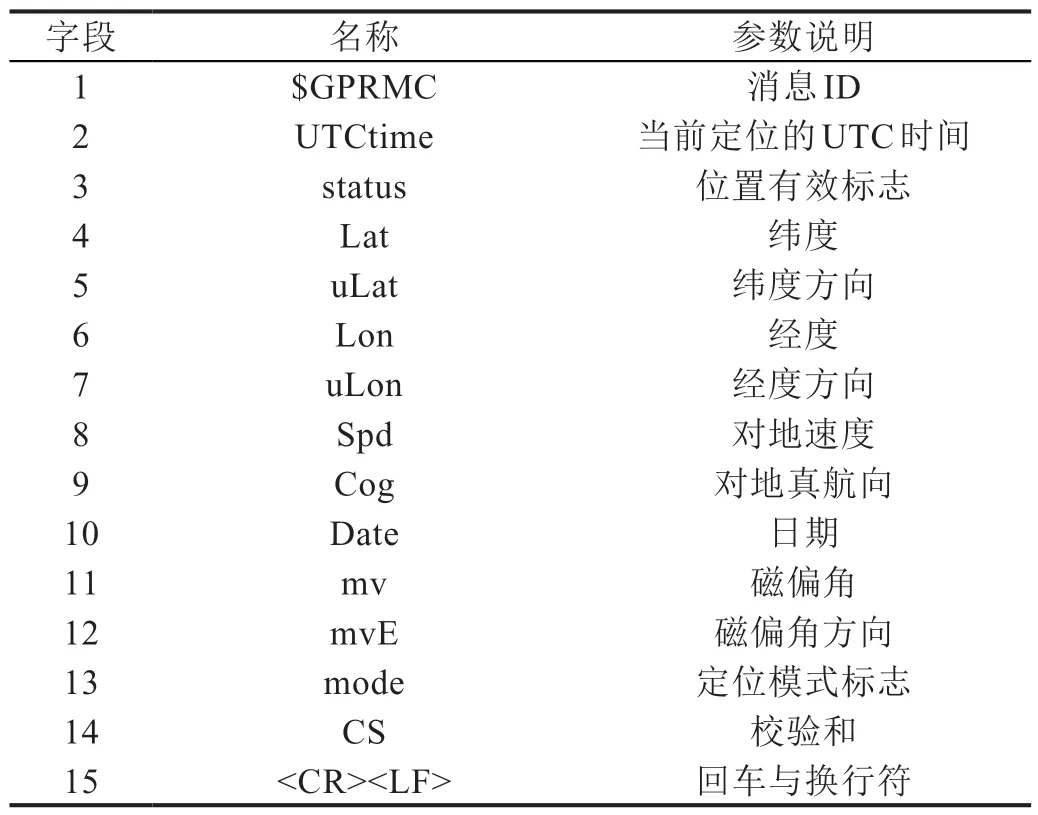
表3 $GPRMC 数据参数
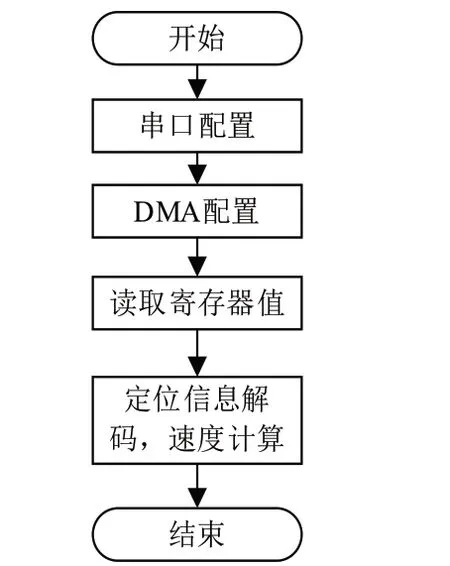
图6 GPS模块程序流程图
2.2 播种施肥控制和状态监测模块
播种施肥控制单元的软件设计主要包括控制直流电机转速,旋转编码器采集直流电机转速并反馈给微控制器以及对排种施肥管堵塞和种肥低于料位阈值时的监测报警。
微控制器通过GPS 测速模块获取拖拉机行驶速度,结合用户设置的播种施肥作业参数,通过输出PWM 信号控制播种施肥直流电机的转速,使得排种施肥轴转速与拖拉机前进速度实时匹配,实现对播种(施肥)量的精确控制,并通过人机交互界面实时显示作业信息,实时监测作业状态。播种施肥控制模块流程图如图7所示。
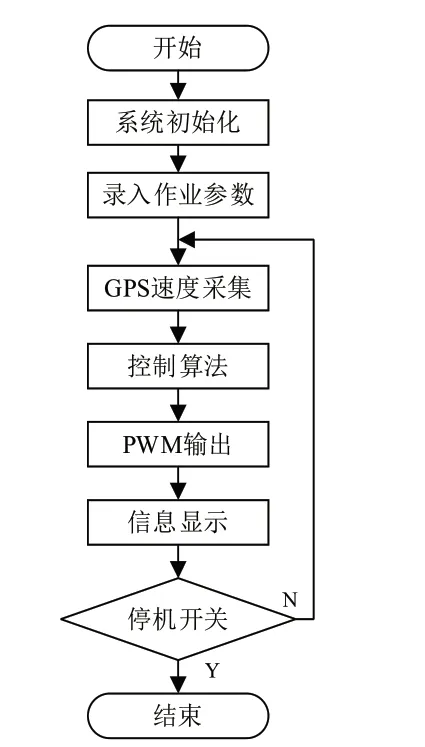
图7 播种施肥控制模块流程图
监测报警模块分为排种施肥管堵塞报警以及种(肥)箱料位报警,微控制器采集光电传感器产生的高低电平,当排种施肥管中光电传感器产生的低电平超过3 s 时,系统判断相应的播种通道阻塞,发出堵塞声光警告;当种(肥)箱中光电传感器从高电平降到低电平时,发出种肥不足的报警提示。
3 田间试验
旋耕播种施肥复式作业机测控系统田间试验于2023 年4 月3 日在江苏省连云港市灌云县龙苴镇进行,采用东风DF2004-5A 拖拉机作为动力,挂载旋耕播种施肥复式作业机。试验田地长度60 m,旋耕播种施肥机作业幅宽为2.5 m,计算得单次试验面积为150 m2,约合0.225 亩。旋耕播种施肥复式作业机单程完成一趟作业,视为完成一次试验。试验主要材料包括小麦、复合肥等,所使用的主要设备有电子秤和所设计的播种施肥测控系统、种肥收集装置、测距尺等,田间作业试验如图8 所示。对采集的数据进行分析得出:该测控系统在多个挡位作业时的实际播种(施肥)量与设定目标值的相对误差小于4%,播种施肥控制性能良好,具有较高的稳定性。

图8 田间作业试验
4 结论
本文设计了基于GPS 卫星定位测速的旋耕播种施肥复式作业机测控系统,采用电机驱动播种施肥转轴的方式设计,进行田间作业时,由GPS 接收器采集复式作业机的行驶速度,控制器依据设定好的亩目标播种(施肥)量换算得到直流电机的理论转速,对电机进行闭环控制,进而控制自适应复式作业机行驶速度的变化。试验表明:该测控系统基本可以用于旋耕播种施肥复式作业机田间作业测速,能够实现精量播种施肥控制。
猜你喜欢
河南农业(2021年5期)2021-12-06
河南农业·综合版(2021年5期)2021-06-16
小学生学习指导(中年级)(2021年5期)2021-05-18
甘肃教育(2020年4期)2020-09-11
学生天地·小学低年级版(2019年10期)2019-12-30
家教世界·创新阅读(2019年11期)2019-12-10
现代装饰(2019年10期)2019-10-17
学生天地(2019年28期)2019-08-25
作文与考试·小学低年级版(2019年7期)2019-04-17
农业知识(2018年33期)2018-01-17
