参数自适应调节的肌电反馈式电刺激仪的设计
2023-10-13 19:23:03陈小月郭旭东郝又国
上海理工大学学报 2023年4期
陈小月 郭旭东 郝又国

摘要:功能性電刺激是脑卒中后导致的运动功能障碍患者康复治疗的有效手段,现有的功能性电刺激仪多采用被动式或参数恒定式刺激方式,治疗效果不佳。本文设计了一种基于表面肌电信号的参数自适应调节的生物反馈式电刺激仪。以放松状态和最大自主收缩状态的表面肌电信号均方根值为参考,用刺激间歇的表面肌电信号均方根值作为反馈信号调节下一刺激周期的脉宽和幅值。为了避免过度刺激造成疲劳和伤害,提出了基于特征 Q 值的疲劳检测算法,实时检测 Q 值变化并在肌肉达到疲劳阈值 b 时终止电刺激。实验结果:仪器可以输出频率、脉宽和幅值范围分别为 1~10 Hz ,0.1~5 ms,5~30 mA 的刺激波形,脉宽和幅值的实际输出值与设定值之间的绝对误差分别为 2.3% 和 2.5%;相同刺激幅值下 12 组负载上的电压和负载阻值线性拟合结果的相关系数为 0.999 7,实现了恒流输出;仪器可以根据肌电均方根值调节脉宽和幅值,在检测到肌肉达到疲劳阈值(50%)时电刺激停止。
关键词:电刺激;表面肌电信号;生物反馈;疲劳检测
中图分类号: TH 772 文献标志码: A
Design of electromyography feedback electrical stimulator with adaptive parameter adjustment
CHEN Xiaoyue1,GUO Xudong1,HAO Youguo2
(1. School of Health Science and Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China;2. Shanghai Putuo District People's Hospital, Shanghai 200060, China)
Abstract: Functional electrical stimulation is an effective means of rehabilitation treatment for patients with motor dysfunction after stroke. As most of the existing functional electrical stimulators use passive or parameter invariant stimulation methods and the effect is poor, a biofeedback electrical stimulator with adaptive adjustment of parameters based on surface electromyography was designed. Root mean square (RMS) of surface electromyography (sEMG) in the relaxed state and the maximum voluntary contraction state was taken as a reference. The RMS of sEMG at the interval of stimulation was used as the feedback signal to adjust the pulse width and amplitude of the next stimulation cycle. In order to avoidfatigueandinjurycausedbyexcessivestimulation,afatiguedetectionalgorithmbasedoncharacteristic Q was proposed. It was detected in realtime to terminate electrical stimulation when the muscle reached the fatigue threshold b. Experimental results show that the instrument can output stimulation waveforms with frequency, pulse width and amplitude ranges of 1~ 10 Hz, 0.1~ 5 ms, 5~30 mA respectively. The absolute errors between the actual output value and the set value of pulse width and amplitude are 2.3% and 2.5%. The correlation coefficient of the linear fitting results of voltage and load resistance on 12 groups of resistors under the same stimulation amplitude is 0.999 7, and the constant current output is realized. The instrument can adjust the pulse width and amplitude according to the RMS value of sEMG, and the electrical stimulation stops when the muscle reaches the fatigue threshold (50%) .
Keywords: electrical stimulation; surface electromyography ; biofeedback ;fatigue detection
中风、脑卒中、脊髓损伤等神经系统疾病往往会造成运动功能障碍,丧失运动功能的患者失去了生活自理能力,这给他们的心理和家庭都带来极大负担[1-2]。研究表明,功能性电刺激是康复治疗的有效方式,利用低频脉冲电流对患者的一组或者多组肌肉施加电刺激,诱发肌肉运动或模拟正常的自主运动,可有效改善患者肌肉或肌群的運动功能以及提高日常生活能力,是一种神经肌肉电刺激疗法[3-4]。游国清[5]、燕铁斌[6]、赵娟[7]等通过对照实验发现功能性电刺激可以使患者的运动能力得到一定程度的恢复。
目前,国内医院使用的功能性电刺激仪多为开环式的被动电刺激[8-9],患者被动地接受一组预设好的刺激波形,这种电刺激缺乏反馈且存在一定的盲目性,治疗效果不佳[10-11]。表面肌电信号是肌肉活动时支配肌肉的神经电信号传导至皮肤表面的一种电生理信号,能很好地反映肌肉的状态[12],可以作为功能性电刺激的反馈信号。葛志鹏[12]、 Yochum 等[13]将刺激过程中的肌电信号转化为听觉或视觉信号让医师或患者通过这些信号了解肌肉的状态,并设置合适的刺激参数,这种方式虽然在一定程度上促进患者主动参与到电刺激治疗中,但对刺激参数的设计要求较高,且需要医师或患者时刻关注肌肉的状态。谭文波[14]、刘虔铖[15]、 Banerji 等[16]提出设置肌电触发阈值,如将阈值设置为最大自主收缩状态和静息状态肌电信号差值的20%,当患者努力收缩肌肉使肌电信号超出阈值时就触发一组电刺激,肌电触发式反馈方式可根据自主产生的肌电信号强度控制电刺激输出与否,但在触发后的刺激过程中参数依然无法改变,人体因很快适应刺激节律而易产生疲劳,且无法对疲劳进行检测。谢小文[17]、Piyus 等[18]设计了一种新型电脉冲治疗仪,使用从患者健肢皮肤表面提取的肌电信号作为肢体动作姿态信息,输出多组足够强度的、协调有序的电脉冲至患侧肌群上,刺激患肢做出和健肢一样的肢体动作。这种反馈方式要求健肢不停地做出指定的动作且仪器需要持续采集肌电信号,患者和仪器的负担较重,另外,对于双侧肢体均瘫痪的患者无法使用。 Li 等[19]提出用含线性动态模块和非线性静态模块的 Hammerstein模型建立刺激脉宽和肌电绝对平均值之间的关系,用系统的输入输出数据辨识模型的参数,进而用辨识出的模型进行在线预测控制,计算出最优的脉冲宽度,此方式在使用前需采集大量数据进行模型辨识且系统的计算量较大,实时性较难实现。
基于以上研究现状,本文设计了一种参数自适应调节的肌电反馈式电刺激仪。将整个治疗过程分为刺激周期和肌电采集周期,在肌电采集周期提取表面肌电信号特征值,用其调节下一刺激周期的脉冲参数,使刺激强度随着肌电信号的变化而变化,实现电刺激参数的自适应控制。同时,仪器自动检测被刺激部位的状态,当肌肉因电刺激出现疲劳时立即停止刺激,防止肌肉损伤。
1 生物反馈式电刺激仪的总体设计
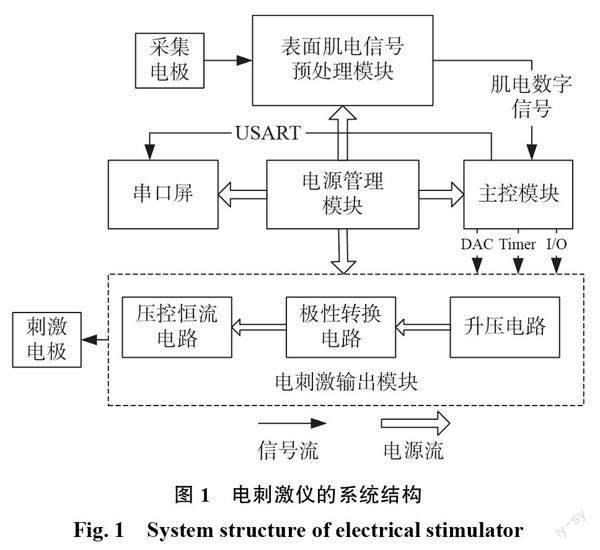
硬件部分的主要功能是产生作用于人体的电刺激信号,主要分为5个部分:电源管理模块、主控模块、电刺激输出模块、表面肌电信号预处理模块和人机交互界面,图1为总体结构。USART为通用同步异步收发器, DAC 为数模转换, Timer 为定时器, I/O 为输入/输出接口。
电源管理模块为其他各模块提供所需电压;主控模块为 stm32单片机最小系统;表面肌电信号预处理模块将由表面电极采集到的肌电信号经过放大和滤波处理,然后进行模数转换,单片机接收肌电数字信号并计算出肌电特征值;人机交互界面通过串口与单片机进行信息交互,可以调节刺激参数的大小,控制刺激的开始及结束,显示当前刺激参数及特征 Q 值。为了输出脉宽、幅值和频率可调的刺激波形,设计了升压电路和恒流刺激输出电路。
电刺激仪是通过电流作用于人体组织,波形和刺激强度均会对治疗效果产生影响。双相对称脉冲波形相对于单相波形来说可以降低电荷在刺激部位的积累对人体造成的伤害,恒流输出使接入刺激电极两端的人体阻抗发生变化时电流大小不随之变化,保证刺激效果,因此,本设计中电刺激波形设计为恒流双相对称的方波,脉冲参数如表1所示。
1.1 表面肌电信号预处理模块的设计
表面肌电信号预处理过程如图2所示。表面肌电信号是幅值范围为0~5 mV 的微弱电信号,采用前置差分放大电路抑制信号中的共模噪声干扰,放大倍数为20倍[20];表面肌电信号(sEMG)的频率主要分布在10~500 Hz 之间,设计了10~500 Hz 带通滤波电路滤除有效频率范围外的噪声;为了使信号可以进行模数转换,进一步设计了后级可调放大电路,可根据肌电信号大小调节放大倍数;采用16位双极性模数转换模块,与单片机之间的通讯方式为 SPI,采样频率为2000 Hz。
1.2 升压模块的设计
人体的阻抗值大小为几百欧姆到几千欧姆,为了能够输出表 1 中最大刺激幅值需要将电压升至 100 V 左右。升压模块采用 Boost 结构,电路图如图 3 所示,输出端电压
式中:Rtop,Rbot分别为上部电阻和下部电阻;VFB 为升压芯片反馈电压,典型值为 1.22 V。
通过改变上部电阻和下部电阻的阻值可以将电压升至不同大小。在本设计中Rtop,Rbot分别为81 kΩ和 1 kΩ,输出端的电压可升至 100 V。
1.3 恒流刺激输出模块设计
恒流刺激输出模块如图 4 所示,由极性转换电路和压控恒流电路构成。极性转换电路由4 个光耦和 4 个三极管搭建的 H 桥构成,RL 为人体阻抗,PC11 和 PC12 为主控芯片的 I/O 口。只有 I/O 口输出高电平时光耦和三极管才能导通,进而形成刺激回路,通过控制两个 I/O 口输出高低电平的时间就可以形成双极性的脉冲方波。
恒流电路可以控制刺激幅值大小。根据放大器的“虚短”特性,微控制器输出的电压Vdac作用在采样电阻 R9 上,则整个电路中的电流大小由数模转换电压Vdac和采样电阻 R9 决定,由于采样电阻 R9 阻值恒定为 100 Ω,仅控制电压Vdac大小就可以改变回路中的电流大小,电压Vdac可在 0~3.3 V 之间调节,电流值 I=Vdac/R9。
2 基于均方根和特征 a 值的自适应反馈调节机制
反馈调节机制分为两个方面:根据刺激过程中采集的表面肌电信号的特征值调节刺激参数;检测到肌肉因刺激产生疲劳时立即停止电刺激。
对刺激开始前患者放松(rest)状态和最大自主收缩(MVC)状态的表面肌电信号进行采集,其肌电均方根值分别记为RMSr和RMSm;Amax 和Wmax分别为不产生疼痛情况下的最大刺激幅值和刺激脉宽, Amin 和Wmin分别为能引起肌肉收缩的最小刺激幅值和刺激脉宽。
长时间的刺激会产生疲劳,引入了结合非线性特征参数样本熵和时域特征参数iEMG的特征Q 值来检测肌肉的疲劳状态。 Q 值的计算方法为
uS
式中:uS,ui分别为刺激部位的肌电样本熵值和肌电积分值。
样本熵可以描述时间序列的复杂程度,其值越小,表明时间序列的复杂程度越低,出现新序列的概率越小,其原理及计算方法见文献[21]。疲劳状态相比于刺激刚开始时的放松状态肌肉变化模式的速率降低,运动单位的活动趋向于一致性,随机成分减少,因而肌电样本熵值降低[22]。随着疲劳程度的加深,肌肉会逐渐紧张,疲劳部位会募集更多的运动单位,放电频率和同步化程度也会逐步提高,所以,肌电iEMG值呈增大趋势。基于上述肌电iEMG值和样本熵的变化,疲劳状态下的特征 Q 值相对第一个刺激周期是减小的,且疲劳程度越深, Q 值越小。因此,在刺激过程中当检测到 Q 值减小到某一程度时认为疲劳产生,停止电刺激输出。
整个过程为刺激周期和肌电采集周期交替进行,刺激周期输出特定参数的脉冲,采集周期采集表面肌电信号并用其计算出新的脉冲参数和特征 Q 值,根据 Q 值判断是否继续电刺激。肌电采集周期的表面肌电信号特征值记为 RMS(k),则下一个刺激周期的幅值 A(k+1)和刺激脉宽 W(k+1)分别为
式中: Q(k)为第 k 个刺激周期中的特征 Q 值; Q(0)为刺激开始前放松状态的特征 Q 值; b 为设定的肌疲劳阈值。
根据以往关于肌肉疲劳的研究[23],当 Q 值降低为初始值的50%时,说明肌肉开始出现疲劳,因此,在本设计中将 b 值暂定为50%,即在采集周期检测到 Q 值降低为初值的50%及以下时停止电刺激输出。
当刺激间歇采集的肌电均方根值 RMS(k)的大小在RMSr和RMSm之间时,刺激脉宽和幅值与最大脉宽Wmax和最大幅值 Amax 成比例,肌电值越大,则下一周期的刺激参数越大,促进患部肌肉的肌力逐渐增大;当 RMS(k)大于RMSm时,为了避免刺激参数变化过大造成肌肉的不适,将刺激参数调整为固定的最大刺激参数;当 RMS(k)小于RMSr时,刺激参数调整为最小刺激参数,促使肌肉收缩。整个电刺激治疗过程中,刺激参数和特征 Q 值经单片机计算后通过屏幕显示出来。
3 实验验证与结果分析
3.1 电刺激仪的输出参数测试
参照图1中的系统框图所开发的肌电反馈式电刺激仪样机如图5所示,将示波器探头接在电刺激输出端进行测量,保持脉宽和幅值不变,通过屏幕将刺激频率依次调节为1~10 Hz,测量结果显示样机可以输出上述频率的刺激波形。
现验证样机输出脉宽的准确性。将1 kΩ电阻接在电刺激输出端模拟人体阻抗,示波器接在电阻两端测量实际脉宽值,保持频率和幅值不变,通过屏幕控制样机输出脉宽在0.1~5 ms之间、增量为0.2 ms的刺激波形,共得到25组数据,计算实际脉宽与设定脉宽之间的绝对误差,以25组绝对误差的平均值作为脉宽的最终误差,结果为2.3%。验证样机输出幅值的准确性,采用同样的实验方法,保持频率和脉宽不变,控制仪器输出幅值在5~30 mA 之间、增量为1 mA 的刺激波形,共26组数据,以26组绝对误差的平均值作为幅值的最终误差,结果为2.5%。
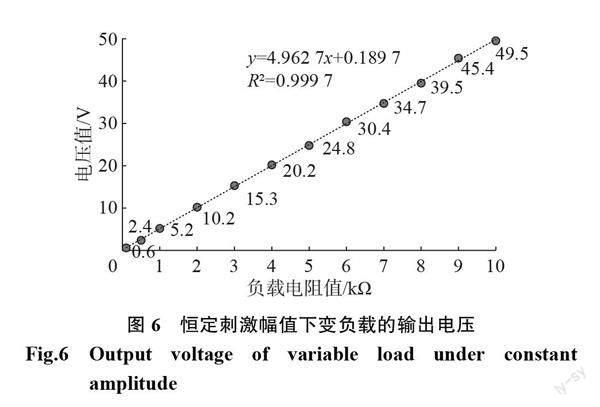
对样机的恒流输出特性进行验证。电刺激仪可针对患者上肢或下肢瘫痪部位进行治疗,刺激电极贴在肢体皮肤表面,人体皮肤阻抗大小为几百欧姆到几千欧姆[24],因此,将电刺激输出端串联一个可调电阻 RL ,阻值分别调节为100,500Ω , 1,2,3,4,5,6,7,8,9,10 kΩ以模拟不同的人体阻抗,设置恒流驱动电压Vdac保持为0.5 V 不变,根据恒流输出原理可知电路中的电流大小为5 mA。将电阻上的电压值和电阻值进行拟合,结果如图6所示,两者的关系为 y=4.9627x+0.1897,相关系数 R2=0.9997>0.8,说明刺激输出端负载上的电压值与负载阻值基本成线性关系,曲线的斜率4.9627即为流过负载的电流强度,接近设定的刺激幅值5 mA,电流强度不随刺激输出端阻抗的变化而变化,系统达到了恒流输出效果。
3.2 生物反馈调节机制的实验验证
首先对样机能否根据所采集信号的 RMS 值调节脉宽和幅值进行验证。用信号发生装置产生的信号模拟表面肌电信号,将RMSr和RMSm分别设置为150μV 和310μV,信号发生装置输出均方根值在110μV 到350μV 之间、增量为20μV 的一系列正弦信号。样机在采集周期对这些信号进行采集,用示波器观察每一个刺激周期输出的脉宽和幅值大小,記录数据并绘制出如图7所示的图表。由图表可以看出,当信号 RMS 值在RMSr和RMSm之间时,脉宽和幅值随信号 RMS 值大小成比例变化,当信号 RMS 值小于RMSr时,样机输出的脉宽和幅值为最小值,当信号 RMS 值大于RMSm时,脉宽和幅值保持为最大值且不再增加,说明样机可以按照式(3)和式(4)所述的机制调节刺激参数。
以相同方法采用健康上肢的表面肌电信号进行验证,实验场景如图8所示。
使用氯化银表面电极,刺激部位为小臂上的桡侧腕屈肌。首先,分别采集放松状态和最大自主收缩状态的表面肌电信号,大小分别为93.4μV 和362.3μV。然后肌肉在采集周期内不同程度地发力,得到不同的肌电 RMS 值。肌电 RMS 值大小可由样机屏幕读出,每一刺激周期的脉宽和幅值由示波器读出,记录数据绘制出图表如图9所示。可以看出,刺激脉宽和幅值与肌电 RMS 值的变化趋于一致,当检测到肌电值变大时,样机输出的参数也会相应地增大,与上述实验结果相同,符合反馈调节机制。
对系统能否在肌肉出现疲劳时停止电刺激的性能进行验证。以采集周期内2 s 的数据进行 Q 值计算,以2000个数据为窗口长度,1000个数据为步长,共得到3个 Q 值,以3个 Q 值的平均值作为此次采集周期的最终 Q 值。共招募8名志愿者,年龄20~26周岁,男生女生各4名,对每名志愿者的小臂前臂肌群施加电刺激,记录刺激开始前、刺激结束时的肌电特征 Q 值,分别记为 Q(0)和 Q(N),得到的数据如表2所示。
由表2可以看出,刺激结束时的肌电特征Q 值相比刺激开始前均有所下降,且在下降到初始值的50%以下时电刺激输出停止。刺激结束时实验者的肌电特征 Q 值并不相同,且并不是正好在50%时电刺激输出停止。这是因为实验者的初始肌电特征 Q 值不同,且不同个体肌肉对于电刺激的生理反应不同。实验结果说明,仪器可以在检测到肌肉疲劳时及时终止电刺激。
4 结论
设计了参数自适应调节的肌电反馈式电刺激仪,为脑卒中后运动功能障碍患者的电刺激治疗提出一种创新的方案。用刺激過程中患者的表面肌电信号控制后续电刺激周期的脉冲参数,使整个治疗过程的刺激参数根据患者自身表面肌电信号强度不断动态变化,减轻传统参数恒定式电刺激带来的疲劳,使电刺激治疗更加适合每位患者本身。同时,以特征 Q 值作为指标检测刺激部位是否到达疲劳状态,当检测到疲劳时及时停止电刺激,避免了深度疲劳或肌肉损伤。
研发的电刺激仪已经进行了初步的性能实验,实验表明,仪器可以输出参数准确的恒流电刺激波形,可以根据反馈机制调节电刺激参数和终止电刺激。本实验中根据相关文献数据将疲劳阈值 b 设置为50%,下一步的研究目标是将仪器应用于临床,通过收集大量实验数据,得到更加精确的疲劳阈值,同时进行有效性和稳定性分析,进一步完善仪器。
参考文献:
[1]何洁莹, 贾杰.脑卒中后上肢和手感觉功能评定的研究进展[J].中国康复医学杂志, 2021, 36(11):1450–1455.
[2]邱卓英, 李欣, 李沁燚, 等.中国残疾人康复需求与发展研究[J].中国康复理论与实践, 2017, 23(8):869–874.
[3]杨婷, 李雪萍, 林强, 等.步态诱发功能性电刺激对偏瘫足下垂患者步行能力的影响[J].中国康复医学杂志 , 2018, 33(2):170–174.
[4] HASHEMI S, MIRJALILI A, KOBRAVI H R. Commentson “ synergy-basedfunctionalelectricalstimulationforpoststroke rehabilitationof Upper-limb motorfunctions ”[J]. Journalof MedicalSignals & Sensors, 2021, 11(4):227–239.
[5]游国清, 燕铁斌.功能性电刺激及其在脑卒中后偏瘫患者中的应用[J].中华物理医学与康复杂志, 2007, 29(2):142–144.
[6]燕铁斌, 许云影, 李常威.功能性电刺激改善急性脑卒中患者肢体功能的随机对照研究[J].中华医学杂志, 2006, 86(37):2627–2631.
[7]赵娟, 张备, 王凡, 等.功能性电刺激对脑卒中后足下垂内翻患者运动功能的影响[J].中国运动医学杂志, 2016, 35(8):742–745.
[8]赵越, 欧朗, 李晓欧.用于运动功能障碍康复的肌电反馈功能性电刺激器研究进展[J].北京生物医学工程, 2020, 39(5):542–548.
[9]孟琳, PORR B, GOLLEE H.功能性电刺激在步态功能恢复中的技术进展[J].仪器仪表学报 , 2017, 38(6):1319–1334.
[10]苏彬, 黄桂兰, 房辉, 等.功能性电刺激治疗脑卒中后步行功能障碍的临床应用及相关机制研究进展[J].中国康复医学杂志, 2021, 36(1):119–123.
[11]王颖, 靳静娜, 李颖, 等.基于低频电刺激诱发表面肌电信号的肌肉疲劳度研究[J].北京生物医学工程, 2013, 32(3):230–236.
[12]葛志鹏.便携式生物反馈电刺激仪控制系统的研究[D].大连:大连理工大学, 2021.
[13] YOCHUM M, BINCZAKS,BAKIRT,etal. Amixed FES/EMGsystemforrealtimeanalysisofmuscular fatigue[C]//AnnualInternationalConferenceof theIEEE Engineering in Medicine and Biology. Buenos Aires: IEEE, 2010:4882–4885.
[14]谭文波.基于表面肌电的肌电生物反馈训练与治疗系统设计[D].广州:华南理工大学, 2019.
[15]刘虔铖.基于嵌入式系统的脑卒中综合康复治疗仪控制系统研究[D].重庆:重庆大学, 2008.
[16] BANERJIS,HENGJ,PONVIGNESHPS,etal. Augmenting rehabilitation after stroke: a flexible platformforcombiningmulti-channelbiofeedbackwith FES[M]//PONSJL,TORRICELLID,PAJAROM. ConvergingClinicalandEngineeringResearchon Neurorehabilitation. Berlin,Heidelberg: Springer, 2013:259–263.
[17]谢小文.一种新型电脉冲治疗仪的设计与实现[D].武漢:华中师范大学, 2018.
[18] PIYUS C K, CHERIAN V A, NAGESWARAN S. EMG based FES for post-stroke rehabilitation[J]. IOP Conference Series:MaterialsScienceandEngineering, 2017, 263(5):052025.
[19] LIZ,HAYASHIBEM,ANDREUD,etal. Real-time closed-loop FES control of muscle activation with evoked EMGfeedback[C]//20157thInternationalIEEE/EMBS ConferenceonNeuralEngineering. Montpellier: IEEE, 2015:623–626.
[20]袁永强.基于 STM32双通道 ICP 传感器的信号采集处理系统的构建[D].西安:长安大学, 2020.
[21]祝荣欣, 王金武, 唐汉, 等.基于心率变异性的联合收割机驾驶员疲劳分析与评价[J].农业工程学报, 2016, 32(1):77–83.
[22]李敏.基于可穿戴设备的驾驶疲劳分级与检测研究[D].武汉:武汉理工大学, 2019.
[23]王琳, 付荣荣, 张陈, 等.基于生物力学分析 Q 值对颈肌疲劳的反映效果[J].仪器仪表学报 , 2017, 38(4):878–885.
[24]贾鑫.具有个性化人体阻抗检测的便携式经颅直流电刺激系统设计[D].秦皇岛:燕山大学, 2019.
(编辑:石瑛)
猜你喜欢
中南医学科学杂志(2023年6期)2024-01-20 00:07:28
包装工程(2023年20期)2023-10-28 03:19:14
中国医药指南(2017年3期)2017-11-13 02:56:01
中国当代医药(2016年31期)2017-02-23 14:10:10
科技创新与应用(2016年36期)2017-02-21 19:59:53
中国医药科学(2016年14期)2017-02-06 14:50:13
中国实用医药(2016年27期)2016-11-30 12:09:15
上海医药(2016年16期)2016-09-21 00:41:29
四川精神卫生(2015年4期)2015-12-23 10:41:42
现代养生·下半月(2015年6期)2015-09-07 20:38:57