锚泊船舶偏荡应对策略研究
2023-10-13 08:33魏茂镇日照引航站
珠江水运 2023年18期
◎ 魏茂镇 日照引航站
1.绪论
随着世界经济一体化的飞速发展,作为承担国际贸易货物运输的航运业的日益兴盛,随之而来的海难事故也日益增多。根据海事部门数据统计,在众多海难事故中,其中有大部分事故是由于船舶在锚地的偏荡、走锚造成的。船舶锚泊偏荡是指船舶在锚地处于锚泊状态中,由于受到风、流、浪的影响下,会进行重心轨迹大致是圆的运动,除此之外,锚泊运动会受到锚链力的作用,使船舶产生周期性的低频率振荡。锚泊偏荡的过程中会产生诸多危害,除了对船舶本身钢结构的破坏外,另一个较为重要的危害就是会产生走锚现象,致使船舶失控。船舶在失控的状态下不仅可能造成触礁搁浅,有时甚至可能与其它船舶发生碰撞,锚地的海难事故往往由此而产生。
本文对单锚泊船的显著性特点进行归纳总结,对影响船舶在锚地偏荡的因素进行深入分析,又对锚泊时的偏荡特性进行深度研究,通过实证分析法,以理论为依据,将实际案例设为研究对象,使理论与实际相结合的去进行分析研究,同时又运用了因果分析法,追根溯源、循因蹈果,从影响因素进行一对一解决,进而给出船舶在锚泊偏荡时的改善方法和建议。从商船本身特性出发,依据锚泊安全原则,改善船舶在锚地的偏荡现象,旨在逐渐改善锚泊船走锚事故发生的现状。一直以来,船舶在锚地的操纵就是船艺训练的一项重要内容。
2.锚泊船偏荡运动分析
2.1 锚泊定义
锚泊是机动船停泊方式的一种,一般指船舶使用锚把船固定在一定的区域范围内。锚泊对于一般的商船而言,具有很多实际的意义。船舶在进出港口、遇到恶劣天气等情况时,都要使用锚泊。锚泊也是检验船长及船舶操纵人员职业水平的重要标准之一[1]。
2.2 偏荡的产生
船舶在风,流,浪的外力影响下,船桨绕着锚泊点进行周期性的摆动,这种运动称之为“偏荡”。而除一字锚之外,单点锚,平行锚,八字锚均产生偏荡现象。船舶在偏荡运动中,锚链受到的冲击张力是随船舶的偏荡而变化的。冲击张力的大小随时间呈周期性的变化。而最大冲击张力一般出现在船首由极限位置向平衡位置运动的过程中转动角速度最大值之后的时候。此时,冲击张力一般可达船舶静止时锚链所受张力的2到3倍,最大可达5倍[2]。在偏荡过程中,由于锚链承受的最大张力往往远大于船舶静止时所受张力,因此船舶极易发生走锚。在诸多情况下,走锚会给船舶带来极大的危险。
2.3 偏荡运动特征参数
由于船舶的偏荡运动与摇摆运动相似,因此在齐藤重信等试验后认为偏荡运动会使船舶的偏荡幅度、周期、角速度、锚链张力与锚方位等呈周期性变化[3]。其规律如图1所示。
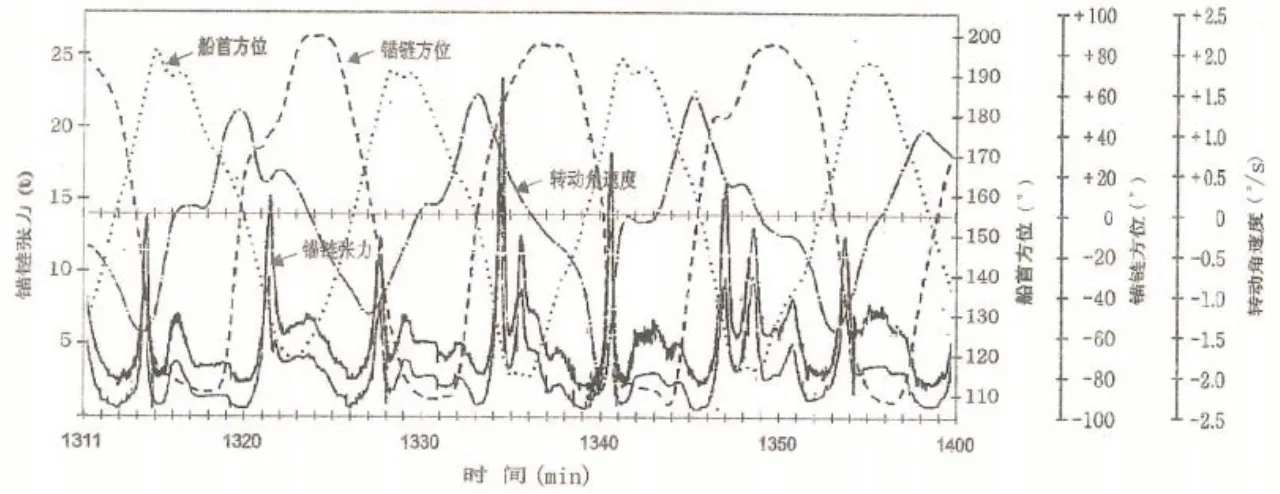
图1 偏荡运动参数时间变化图
2.3.1偏荡幅度
(2)剧烈的偏荡无疑会使船舶摇摆不定,使得船上工作环境更加恶劣。恶劣的工作环境极易引起船员身体上的不适和工作效率上的减慢,若发生紧急事故,很容易造成重大的损失。
在教育教学改革中,各国高校都将实践能力和创新精神作为主要目标进行研究与改革。国外在20世纪60年代就开始了这方面的调研,随着时间的推移,也积累了很多成功经验,开发出了一些适用于本国的人才培养模式,如双元制模式、CBE模式等。我国从20世纪80年代开始了应用型人才培养模式的创新,在学习和借鉴外国优秀经验的基础上,根据本国国情,开发出了一些新课程,例如多元统合型课程等,这些课程模式各有特点,但仍然不能适应我国快速发展的新形势对人才的需要。
创新驱动发展战略是我国的国家战略。科技企业孵化器作为国家创新体系的重要组成部分,已成为科技创新的主力军。本文以四川省绵阳市一家以科技企业孵化器为主要业务的Z公司为调查研究对象,通过对Z公司为发展孵化器业务在具体实践中所形成的思路、存在的问题、解决的方法以及取得的成效进行分析、归纳和总结,进而得到科技企业孵化器建设可借鉴的具体思路和对策。
3.3.1事故原因分析
2.3.3风舷角的变化规律
以车辆自组织网络(Vehicular Ad hoc Networks,VANETs)为代表的移动物联网(Mobile Internet of Things)[1-5]是智能交通系统设计中至关重要的一部分,许多研究机构已经开始致力于这方面的研究[6-10].路由协议作为VANETs中重要的组成部分,是实现智能交通至关重要的一部分.为了满足不同应用的需求,设计一个高效可靠性低时延的路由协议成为了首要解决的问题[11-15].
风舷角定义为偏荡过程中船首尾与风向的夹角。偏荡过程中,风舷角是动态有规律变化的。其极值发生在极限位置和路径中点。受风舷角的变化影响,船舶会绕重心左右旋转。
2.3.4锚链张力
偏荡中的船舶将会受到静态张力和冲击张力这两个锚链张力的影响。静态张力即为静力,一直保持不变。而冲击张力随偏荡运动呈动态变化。
(5)建立诚信档案管理系统。将全国甚至国外在中国任职的独董数据收入其中,完整地记录每位独董的历年情况,对无作为甚至违法的独董给予处分,并向全社会公开其失职行为。
本区岩浆岩地表出露较少,主要为加里东晚期、燕山期。有利成矿的为燕山晚期岩体,有村前、铁坑、铁山、江东、青竹、志木山等,都以岩瘤、岩枝、岩脉的形式出露。岩性为花岗闪长斑岩、花岗斑岩、石英斑岩等,侵入于二叠系、侏罗系、白垩系地层中。受区内拆离滑脱构造影响,深部大部分错断,未发现连续部位。
2.4 偏荡的危害
当船舶发生偏荡时,锚链的冲击张力不时的发生变化,对锚的抓力产生严重的影响。当冲击张力达到最大的瞬间,很有可能发生走锚现象。船舶走锚时,船体处于失控的状态,如果船舶驾驶人员以及轮机人员不能及时正确地操纵船舶,轻者影响到周围航行水域的交通秩序或锚链断裂,重则可能与周围的船舶发生碰撞或搁浅在周围礁石上。
锚泊船剧烈偏荡造成的具体危害如下:
(1)船舶的偏荡过程从力学的角度来讲发生的是离心运动。船体的离心运动加大锚链的张力,如果锚链所受张力超过锚链的弹性限度,锚链就会产生断裂,此时船舶所做的就不再是小范围内的移动,而是完全的失控。既可能造成触礁,也可能与过往船只发生碰撞,极易产生重大海难事故,同时附近海域的正常交通会受到影响。
根据ak值大小,经“同异反”聚类后,已知中国男篮与世界水准的差距有5个类别,因“零差距”与“较小差距”对应的指标在同异反态势上与世界水准具有强同势或准同势,深入研究的意义不大。因此,本文只对 “一定差距”、“较大差距”和“相当差距”三个类别进行分析。
发生偏荡的锚泊船会左右摆动,类似单摆球的运动轨迹。最左或者最右的地方称为极限位置,极限位置之间的直线距离就是偏荡幅度。根据航海经验和试船实验,出链长度与风力和偏荡幅度成正比,与船舶的载荷重量成反比。通常尾倾比首倾偏荡严重。
2.3.2偏荡周期
(3)如果船舶是双锚船舶,受到偏荡影响,水下双锚的锚链极易造成搅缠在一起,导致锚链自身的张力变大,造成锚链断裂,产生走锚的危害。另一方面,如果锚链搅缠,而操作员又不知情,在收起锚链的过程中极其容易造成危险,无论是船体本身还是操作人员都可能受到伤害。更有甚者,如若遇到台风,船舶因为锚链搅缠在一起而不能及时改变方向躲避台风,很容易造成翻船产生更大的危险和损失。
调查中还发现,学生在毕业找工作时不会充分考虑恋爱对象的意见,有恋情“毕业死”现象。对待恋爱的态度,只有9%的在校大学生不赞成“大学生恋爱”,有67%的学生“完全赞成”。由此可见,引导学生正确对待恋爱非常重要。
综上所述,船舶偏荡不仅会对船舶的使用寿命造成影响,而且也会产生一系列的连带危害,产生的损失将不容小觑。
3.“KOTA BUDAYA”轮与“鑫泰达”轮案例分析
3.1 事故概况
2016年7月20日1045时,新加坡籍杂货船“KOTA BUDAYA”(文城)轮在天津港水域由于偏荡发生走锚后与锚泊的中国籍散货船“鑫泰达”轮发生碰撞。造成“鑫泰达”轮球鼻艏左半球约3平方米面积变形,内部大梁受损。艏楼左舷外围板2.5米损坏。“KOTA BUDAYA”轮右舷四舱中部有2×2米凹陷。事故图像如图2所示,该事故导致直接经济损失约300万元人民币。
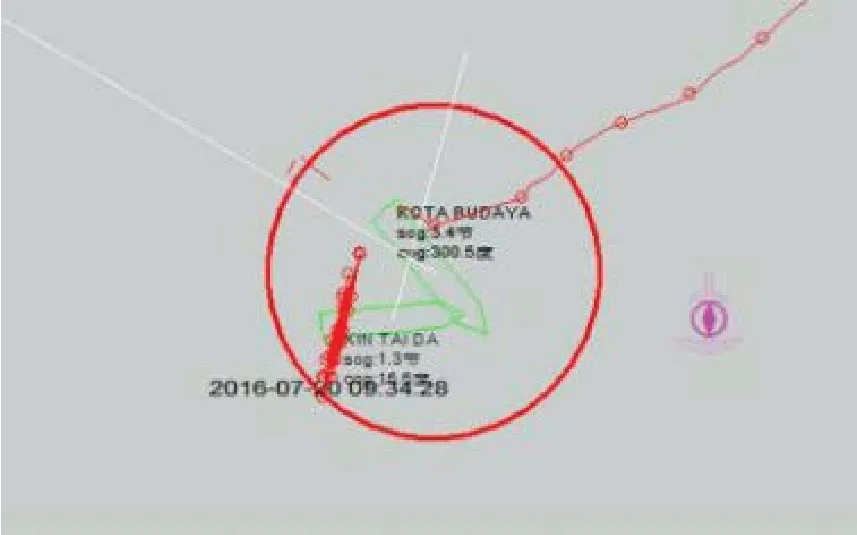
图2 “KOTA BUDAYA”轮与“鑫泰达”轮碰撞时AIS图
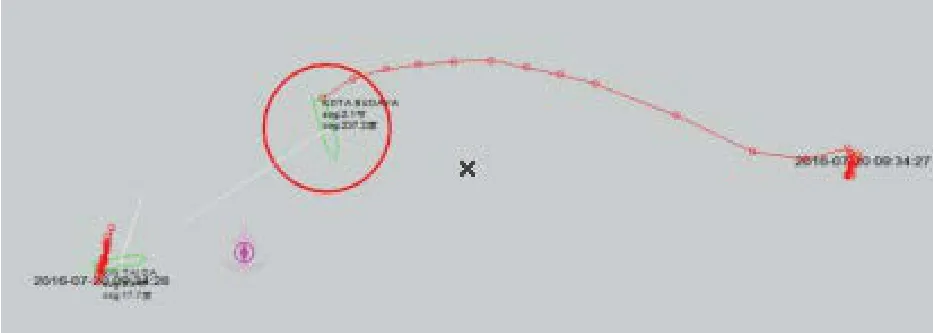
图3 “KOTA BUDAYA”轮走锚后轨迹图
3.2 事故过程回顾
2016年7月15日,“鑫泰达”轮抵达天津大沽北锚地待泊,锚位38°57.2′N/118°3.4′E。船舶空载,前吃水4米,后吃水5.3米,预计7月20日靠N10西泊位。
2 0 1 6 年7 月1 8 日,“K O T A BUDAYA”轮到达天津港北锚地抛锚,锚位38°57.2′N/118°4.8′E,左锚6节下水,船舶空载,前吃水4.6米,后吃水6.4米。
19日下午,双方船舶皆收到天气预报,阵风将达到10级,随后“KOTA BUDAYA”轮加一节锚链入水,通知机舱备车,备双锚,加固绑扎。
我俩拦了辆出租,潘阳一上车就合上了眼。不一会儿,一条晶亮的哈喇子就从他的嘴里滴拉下来,掉到前大襟上。看他这副样子,谁能想象到,六年前,他是有名的“三中四少”之首,号称“玉树临风小潘安”。时光和欲望摧残了他的容颜,让他在二十四岁的时候就变成了中年人。
2 0 日 上 午0 7 4 5 时,“K O T A BUDAYA”轮三副上驾驶台接班,开启GPS定位,通过GPS定位,发现船舶偏荡幅度为2.5倍船长,偏荡周期10分钟,1020时,三副与值班水手发现船舶速度达到0.9节怀疑走锚,1020时“鑫泰达”轮发现“KOTA BUDAYA”轮仅距离0.35海里,并多次呼叫“KOTA BUDAYA”轮,“KOTA BUDAYA”轮回应已备好车,并准备用车。1024时“KOTA BUDAYA”轮船长接到通知上驾驶台,1025时“KOTA BUDAYA”轮船长广播通知大副上船头待命,发布危险警告,悬挂失控信号旗。1026“KOTA BUDAYA”轮报告交管中心船舶失控,1030时,“鑫泰达”发现“KOTA BUDAYA”轮正横于其船头100米左右,1032时“KOTA BUDAYA”轮主机启动,可是由于风速过大,控制不了船速。1045时“KOTA BUDAYA”轮与“鑫泰达”轮发生第一次碰撞,紧接着两船又发生了第二次碰撞。
3.3 事故分析
偏荡船两次到达同一位置的时间间隔称为偏荡周期。有时偏荡的幅度虽然小了,但周期依然不会变。船舶的偏荡运动是变速运动,从极限位置到路径中点,加速度一直在增加。偏荡周期与风力和船舶载荷呈负相关,同时与出链长度呈正相关。
“KOTA BUDAYA”轮在发生走锚事故前,船舶的偏荡幅度较大,通过“KOTA BUDAYA”轮的观测数据得到“KOTA BUDAYA”轮当时的偏荡幅度为2.5倍船长,偏荡周期10分钟,最大风舷角50度。而根据锚泊船的系留力公式
P=Pa+Pc=λa×Wa+λc×Wc×L(1)
(4)船舶在水面以上偏荡,锚在水下旋转,导致水面下的海水流动,流体压强小,减小锚在水下的抓力,无法发挥其应有的固定作用,从而产生走锚,造成一系列的危害事故。
其中P代表系留力,Pa代表锚的抓力,Pc代表锚链的抓力,λa代表锚的抓力系数(“KOTA BUDAYA”轮为斯贝克锚 5),Wa代表空气中锚的重量(“KOTA BUDAYA”轮为3060公斤)代表锚链的抓力系数(沙底 取0.75),Wc代表单位锚链在空气中的重量(50.6kg),L代表卧底链长(192.5米)。得到“KOTA B U DA YA”轮事故时的系留力为211KN。
而“KOTA BUDAYA”轮的走锚事件表明,在10级风船舶空载的情况下,“KOTA BUDAYA”轮因为偏荡所产生的张力大于211KN。船舶在偏荡过程中,会产生极大的张力,尤其在风浪较大,受风面积较大的情况下,船舶由于偏荡的影响,极易发生走锚,而且走锚之后船舶的漂移速度往往也比较大,船舶如果主机刚刚启动,根本无法控制船舶。因此非常容易产生危险。
3.3.2事故责任分析
2)海风锋垂直剖面要素结构显示,海风偏冷气团的水平速度u登陆构成海风锋前缘,对锋面垂直抬升位置及强度起重要作用,造成此处显著的上升运动中心,并往往有云系及较强降水配合。此外,锋后的下沉运动与锋前上升运动配合,在海风锋垂直剖面上形成锋面二级环流,影响海风锋系统环境的不稳定特征。因此海风锋是大环流稳定背景下的局地扰动源,海风锋锋面附近二级环流也形成一个完整的海风环流。
“KOTA BUDAYA”轮没有运用良好的船艺。船舶空载,在10级阵风的情况下,船舶偏荡极大,值班驾驶员在偏荡之中对失控的风险估计不足。事故发生前,船舶吃水为前4.6米,后6.4米,而“KOTA BUDAYA”轮在满载情况下吃水前10.5米,后10.5米,致使船舶偏荡较大,最终发生走锚。驾驶员应该调整吃水,打入压载水,保持船舶吃水在满载吃水的2/3以上,这样可以缩减船舶的受风面积,消弱风对船舶带来的影响。
“KOTA BUDAYA”轮没有做好瞭望工作。船舶在偏荡过程中,尤其是在极限位置附近,极易发生走锚现象,而“KOTA BUDAYA”轮三幅发现船舶走锚过晚,没有做好瞭望工作。当“KOTA BUDAYA”轮启动主机时,船舶的飘移速度已达到2-3节,此时主机无法控制船速,导致碰撞危险。
“KOTA BUDAYA”轮没有做好戒备工作。在事故发生当天,“KOTA BUDAYA”轮已经接到天气预警。在恶劣的条件下锚泊,船舶偏荡较大,船员的戒备不足,没有考虑到船舶因为偏荡而发生走锚的情况,并且在走锚后没有第一时间控制住局面,导致船舶发生碰撞。
3.3.3客观原因
大风是本次事故发生的很重要的一个客观原因。事故发生时,海上阵风10级,船舶在阵风和偏荡的影响下,导致锚链的张力增大,产生走锚,且走锚后,船舶的飘移速度也非常大,船舶启动主机后在短时间内仍然无法控制船速。
我们打算向上写一份务虚的报告。报告由我起草,厂里负责盖章。理由原因找了一大堆,像墙角堆放的边角废料。问题的重点在于思想认识上存在“我行我素”的现象,“全镇一盘棋”的观念欠缺,至于超预算的问题,以施工难度加大和人工工资上涨为由。门楼建筑是木已成舟,只能下不为例,力争满负荷超额完成全年的生产计划。我将刘厂长盖章的报告作为附件,又以镇政府的名义向县政府打了整改报告。重点检讨镇委、镇政府对加强企业党建工作的认识不足,企业的党组织相对弱化,各项制度也不健全,导致对企业的管理出现盲区。至于整改措施,不言而喻,总是与存在的问题一样避实就虚。
4.结论
船舶在锚地产生偏荡会产生诸多的危害,不仅针对船体本身,还会对附近船只造成影响,导致事故的多发。为此减少船舶在锚地的偏荡现象的发生是减少锚地海难事故发生的重要方向。
通过对实际案例的研究,发现船舶的偏荡是由于船舶在锚地处于锚泊状态中,受到风、流、浪和锚链力的作用的影响,致使船舶产生周期性的低频率振荡。在偏荡研究过程中也发现了因为偏荡产生的诸多危害,不仅对船舶本身钢结构的破坏,而且会产生走锚现象,致使船舶的失控,造成触礁搁浅,有时甚至可以与其它船舶发生碰撞,锚地的海难事故往往由此而产生。同时通过对“KOTA BUDAYA”轮走锚事件的实际案例分析,发现船舶偏荡的危害不容小觑,驾驶员在锚泊时也要时刻保持警惕,尤其是在风浪较大的情况下要格外的机警。可以通过调整压载水,使船舶平吃水来减缓船舶的偏荡,避免发生危险。锚泊船因偏荡走锚而导致的事故时常发生,虽然不能完全杜绝船舶的偏荡,但是可以通过合理可行的改善途径减小船舶的偏荡,进而减少船舶在锚地走锚现象的发生,从而改善锚泊船走锚事故发生的现状。
猜你喜欢
江苏船舶(2023年2期)2023-06-14
中国水运(2022年7期)2022-08-06
中国海事(2022年2期)2022-03-01
船海工程(2021年6期)2021-12-17
船舶标准化工程师(2020年1期)2020-06-12
大陆桥视野·上(2020年4期)2020-05-26
大陆桥视野(2020年4期)2020-05-15
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
江苏科技大学学报(自然科学版)(2015年3期)2015-03-07
船舶力学(2014年5期)2014-01-19