
中继卫星支持航天发射星/箭天线指向算法研究
2023-10-12 07:49闫雪飞
无线电工程 2023年10期
王 良,敦 怡,闫雪飞
(中国人民解放军32039部队,北京 100094)
0 引言
经过半个世纪的发展,我国航天发射已经具备良好的技术基础,测控系统也迎来快速发展[1]。近年来,随着商业航天相关法规制度出台,商业航天市场迅速发展。目前,美国太空探索技术公司[2](SpaceX)和蓝色起源公司(Blue Origin)等商业公司发展迅速,并且以低成本的优势领跑全球商业航天市场。虽然我国商业航天发射起步较晚,但一些商业航天公司也初步具备了一定实力,先后完成多次成功发射,取得良好的经济和社会效果[3]。中继卫星系统是我国新型的天基测控系统[4-6],支持商业航天发射,具有覆盖高、部署快和成本低等优势[7-9],已成为商业航天发射测控的首选手段[10-12]。
中继卫星天线和箭载终端天线指向是完成中继卫星测控弧段的最重要的一个环节。文献[13]针对传统中继天线跟踪角度STK仿真算法无法与航天器AIT实时测试过程相结合的问题,提出了一种中继天线跟踪角度实时预算方法,该方法利用航天器轨道、天线波束及坐标系关系建立了中继天线指向角度等效模型。文献[14]采用分段拟合方法和有约束的最小二乘算法,实现了航空器跟踪弧段内星间天线稳定的高精度指向控制。文献[15]根据中继卫星工作特点,重点研究了中继卫星应用于航天发射测控时,中继卫星星间天线的跟踪控制方法。文献[16]针对飞行器与中继卫星之间建立全球实时通信数据链的需求,开展了飞行器二维有源相控阵天线自跟踪技术研究。文献[17]在假设了中继星平台姿态坐标系和中继星天线坐标系的条件下,叙述由中继星及用户星轨道根数求得中继星天线程控指向用户星的方位角和俯仰角的方法。文献[18]通过分析箭载设备的组成和遥测数据传输链路,仿真计算了相控阵天线指向角和等效全向辐射功率值。上述研究基于中继卫星或飞行器天线开展指向算法研究,没有形成星箭、箭星指向闭环,无法确定中继卫星跟踪航天发射任务弧段。本文以中继卫星支持商业航天火箭测控任务为背景,研究任务过程中继卫星和箭载终端天线指向角计算算法模型,对任务过程中天线跟踪过程进行计算推演,判断中继卫星系统执行任务能力,能够根据计算结果快速分析确定中继卫星系统支持航天发射任务弧段,提高中继卫星系统火箭任务应用能力。
1 坐标系定义
①星间链路天线坐标系:中继卫星为地球同步轨道卫星,天线坐标系随同天线转动,其原点oa位于天线驱动机构二维转轴的交叉点。当没有安装误差时,天线坐标系的xa轴与卫星本体xb轴平行;当天线指向地心时,天线坐标系的ya轴与卫星本体轴平行,天线坐标系的za轴与卫星本体zb轴平行,这时称为天线的零位。天线绕xa轴转动的角度定义为方位角A,天线绕ya轴转动的角度定义为仰角E。
②火箭发射坐标系:坐标系原点与发射点o固连,位于火箭质心在发射台水平面的投影点。ox轴在发射点水平面内,指向发射瞄准方向,即射向(射向为从天文北向东转过的角度,火箭射击瞄准方向的天文设计方向角)。oy轴垂直于发射点水平面指向上方。oz轴与xoy面垂直并构成右手坐标系,如图1所示。由于发射点o随地球一起转动,所以发射坐标系为一动坐标系。
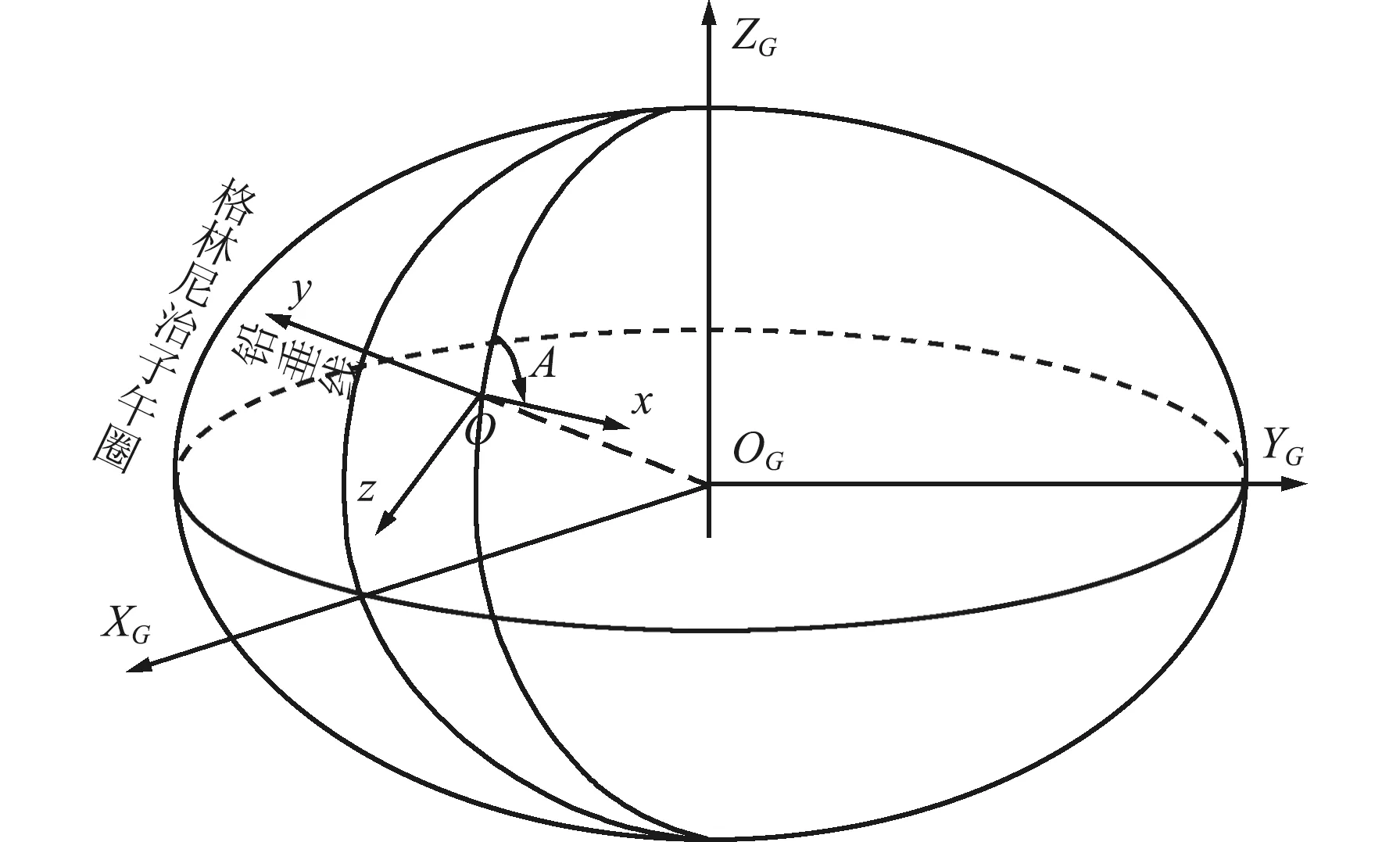
图1 发射坐标系示意Fig.1 Schematic diagram of launch coordinate system
③火箭发射惯性坐标系:火箭起飞瞬间,oA与发射点o重合,各坐标轴与发射坐标系各轴也相应重合,在发射瞬间各坐标轴与发射坐标系相应轴平行,整个参考框架不随地球旋转,oA点及坐标系各轴方向在惯性空间保持不变。利用该坐标系可以建立火箭在惯性空间的运动方程。
④箭体坐标系:箭体坐标系用于描述空间点对箭体的位置关系和火箭姿态,固连弹体上,随弹体运动。坐标原点o1为火箭的质心,o1x1为箭体外壳对称轴,指向火箭的头部,o1y1在火箭的对称面内,指向Ⅲ象限;该平面在发射瞬间与发射坐标系xoy平面重合,y1轴垂直x1轴,z1轴垂直于主对称面,顺着发射方向看去,z1轴指向右方,o1-x1y1z1为右手坐标系,如图2所示。该坐标系在空间的位置反映了火箭在空中的姿态。
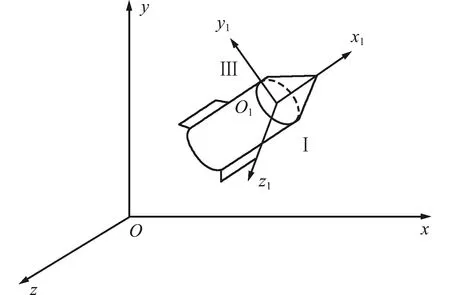
图2 箭体坐标系Fig.2 Rocket coordinate system
⑤姿态角定义:火箭在发射坐标系中的姿态角按照坐标旋转方式定义,如图3所示。

图3 火箭在发射系中的姿态角定义Fig.3 Attitude angle definition of the rocket in the launch coordinate system
俯仰角φ——火箭ox1轴在发射平面xoy的投影与ox轴的夹角,是ox1轴绕发射坐标系oz轴的转动角度,投影量在ox轴上方为正。
偏航角ψ——火箭ox1轴在发射平面xoy的投影与ox1轴的夹角,是ox1轴绕发射坐标系oy轴的转动角度,ox1轴在射击平面的左方为正。
滚动角γ——火箭y1oz1平面与发射平面xoy交线与oy1轴的夹角,是火箭oy1轴绕发射坐标系ox轴的转动角度,旋转矢量与oz轴方向一致为正。
⑥火箭中继终端天线坐标系:火箭中继终端天线坐标系用于描述火箭上中继终端天线指向中继卫星的指向,天线坐标系与弹体坐标系重合,天线框架角定义如图4所示。
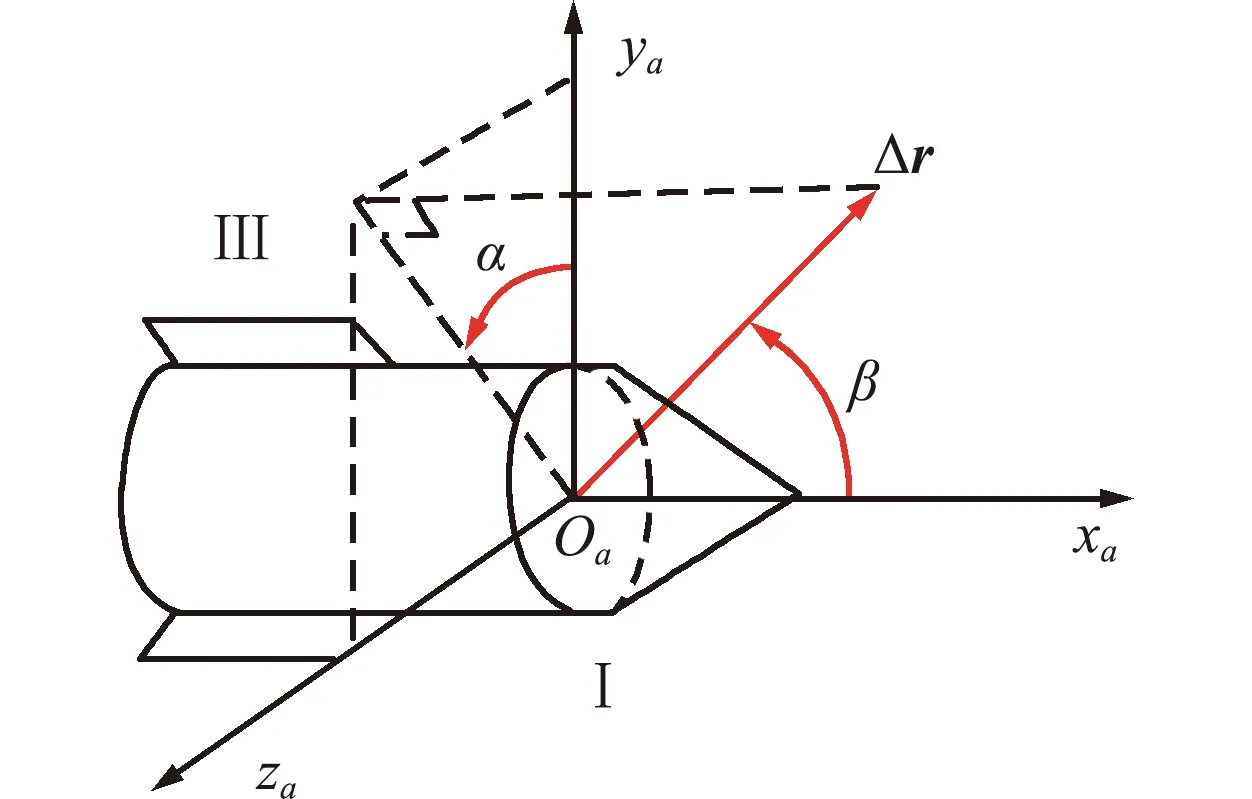
图4 中继终端天线框架角定义Fig.4 Gimbal angle definition of the relay terminal antenna
方位角α——天线指向绕oaxa轴转动的角度,天线指向oaya(第Ⅲ象限)时α为0°,α取值[0°,360°]。
方位角β——天线指向与oaxa轴的夹角,天线指向oaxa轴时β为0°,指向oaya轴时β为90°,β取值[0°,180°]。
2 卫星天线指向参数计算模型

①读取中继卫星的经度、纬度、高度,将其转换到地固坐标系下,得到目标的矢量OM=(xMJ,yMJ,zMJ)T;
②读取火箭发射坐标系下位置,将其转换为大地坐标系下的经度、纬度、高度后,再将其转换到地固坐标系下,则得到目标的矢量OR=(xRJ,yRJ,zRJ)T,计算火箭与卫星矢量差MR=OR-OM;
③根据中继卫星姿态,将地固系矢量差MR转换到轨道坐标系,将坐标轴绕ZG轴旋转-(90-B),绕XG轴旋转(90+L)绕ZG轴旋转(90+A),如图5~图7所示。
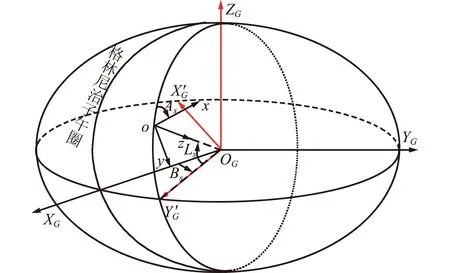
图5 绕ZG轴旋转-(90-Bs)Fig.5 Rotating -(90-Bs) around the ZG axis

图6 绕XG轴旋转(90+Ls)Fig.6 Rotating (90+Ls) around the XG axis
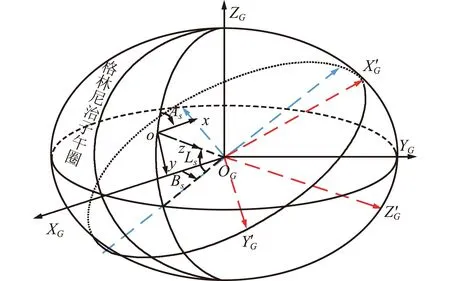
图7 绕YG轴旋转(90+As)Fig.7 Rotating (90+As) around the YG axis
④将轨道坐标系按照Tmf转换到星本体坐标系,转换矩阵Tmf为:
(3)
⑤将星本体坐标系转换到天线坐标系,计算其在天线坐标系中的列阵并归一化后,得到(u,v,w)T,计算天线波束指向目标的角度:
(4)
式中:α0和β0分别为天线指向星下点的角度,根据卫星标校结果给出,一般为固定值。
3 箭载终端天线指向参数计算模型
已知:中继卫星的大地坐标系位置(Ls,Bs,Hs),火箭发射点的大地坐标位置(L0,B0,H0),火箭发射方向角Ar,火箭在发射系中的位置矢量rm1=[Xm1,Ym1,Zm1]T,卫星俯仰角φR,偏航角ψR,滚动角γR。计算火箭中继终端天线指向计算α、β。
①中继卫星J2000惯性坐标系中的位置矢量转换到地固系:
(5)
②中继卫星位置矢量从地固系转换到火箭发射系。
③发射点的大地坐标(L0,B0,H0)转换为天文坐标(λ,φ,Hv):
(6)
④大地发射方向角A转化为天文发射方向角af:
af=A+ηtanφ。
(7)
⑤S发射点的大地坐标(L,B,H)转换为地固系位置矢量(XfG,YfG,ZfG):
(8)
式中:a=6 378 137 m,为地球椭球长半轴,e2=0.006 739 501 694 35,为地球椭球第一偏心率的平方。
⑥中继卫星位置地固系的位置矢量转到发射坐标系:
(9)
计算发射系中火箭中继终端天线指向矢量:
(10)
⑦将地固系矢量差MR转换到轨道坐标系,将坐标轴绕ZG轴旋转-(90-B),绕XG轴旋转L,绕ZG轴旋转-(90+A),将火箭中继终端天线指向矢量转换到箭体坐标系,从发射坐标系到箭体坐标系的转换矩阵为Tmf,如图8~图10所示。
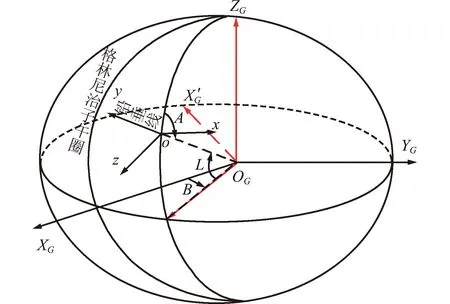
图8 绕ZG轴旋转-(90-B)Fig.8 Rotating -(90-B) around the ZG axis
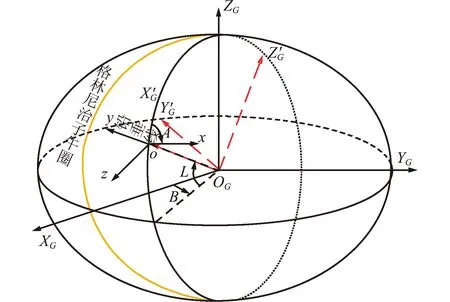
图9 绕YG轴旋转LFig.9 Rotating L around the YG axis
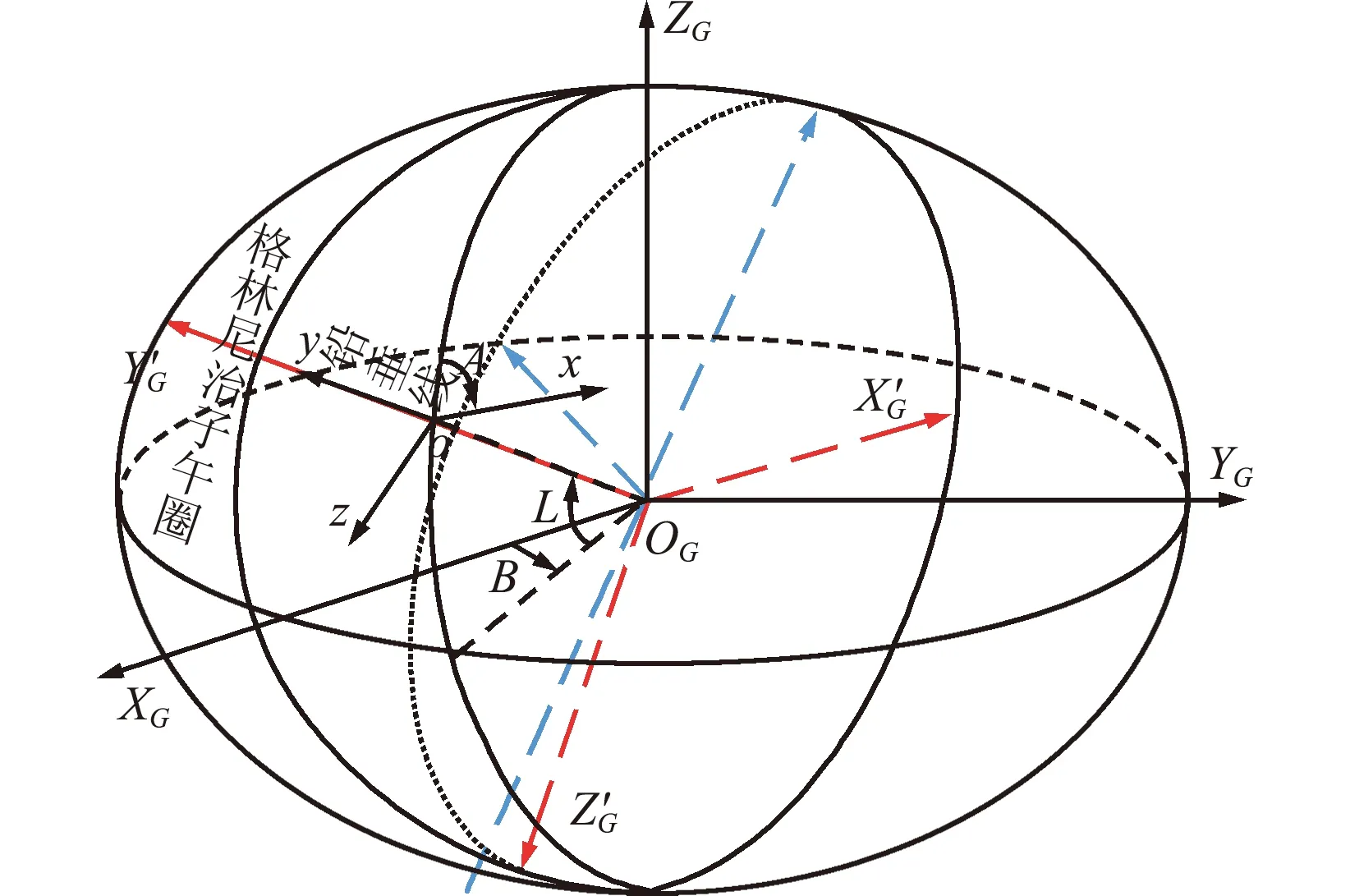
图10 绕XG轴旋转-(90+A)Fig.10 Rotating -(90+A) around the XG axis
Tmf=Rx(γ)·Ry(ψ)·Rz(φ)=
(11)
箭体坐标系中的天线指向矢量:
(12)
弹体坐标系中计算中继天线指向方位角和俯仰角:
4 中继卫星支持火箭天线实现
基于Matlab进行GUI界面软件设计,将中继卫星支持火箭天线指向算法进行可视化实现。软件根据发射场位置、火箭射向、卫星位置、火箭弹道和终端安装位置,计算并输出卫星天线跟踪火箭指向变化、终端天线跟踪卫星指向变化。火箭弹道及天线指向计算初始参数设置包括设置卫星经度、纬度和高程、火箭经度、纬度和高程、火箭射向角度、终端安装在火箭的角度、输入弹道文件,根据弹道文件选择弹道文件坐标系。
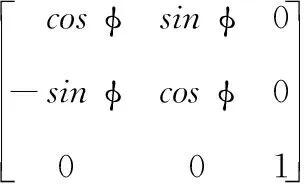
箭载终端天线框架角由运载火箭弹道位置、姿态信息以及中继卫星位置计算确定,如图11所示。其中,横轴为发射后的时间,纵轴为终端天线指向角度,蓝色线为天线指向绕oaxa轴转动的角度,红色线为天线指向与oaxa轴的夹角,紫色线为天线指向与天线阵面法线的夹角。根据计算结果和终端天线指向设计约束,可以快速判断箭载终端指向中继卫星的可视弧段。
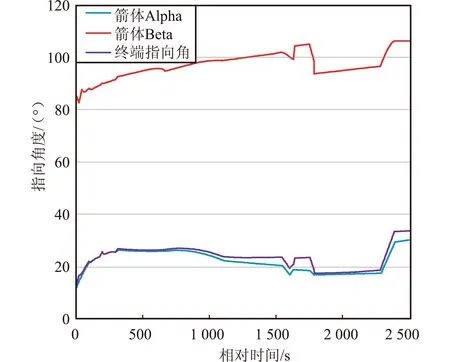
图11 箭载终端天线指向计算结果Fig.11 Calculation results of the rocket terminal antenna pointing
中继卫星星间天线框架角由运载火箭位置以及中继卫星位置计算确定,如图12所示。根据计算结果和中继卫星天线设计约束,可以快速判断中继卫星指向火箭的可视弧段。
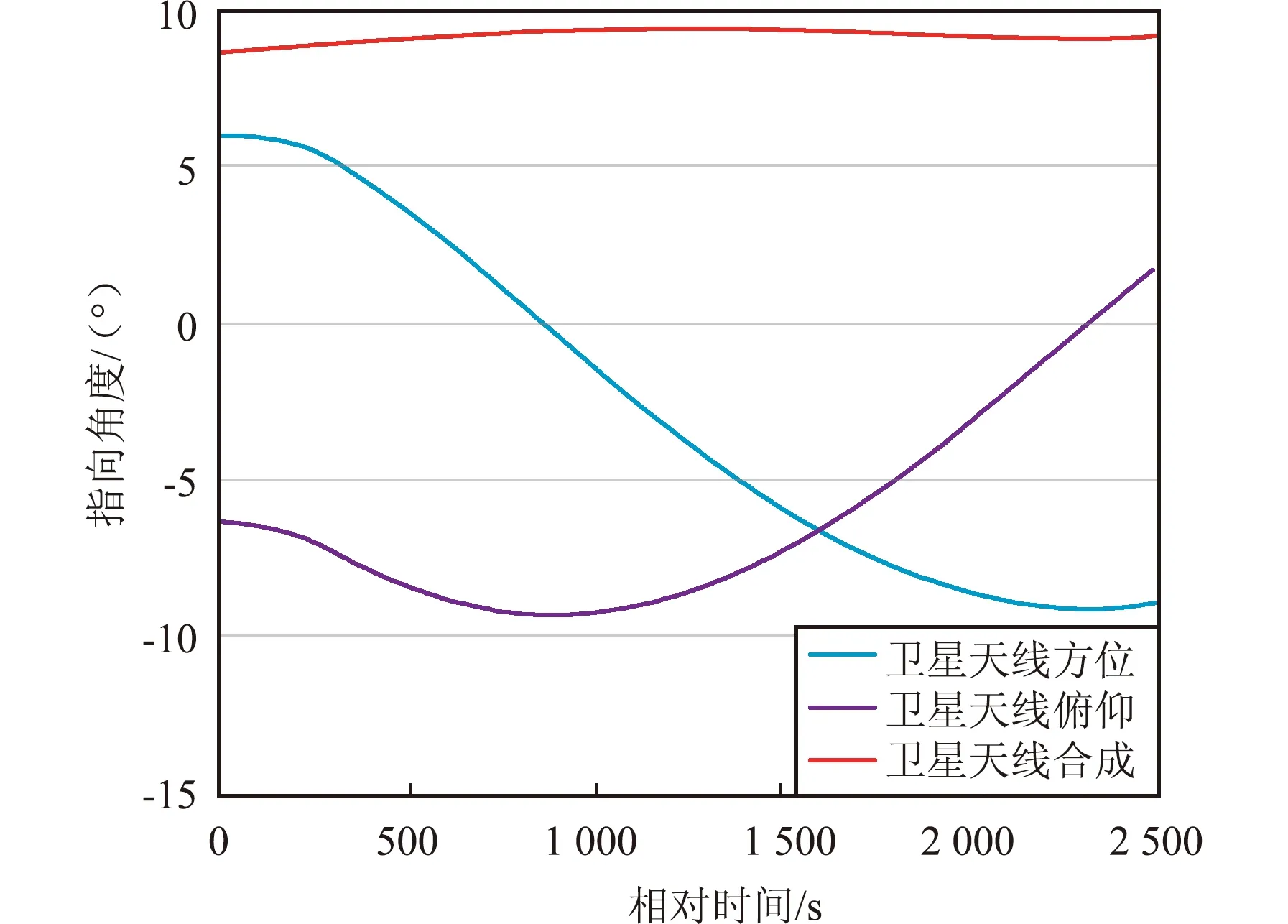
图12 中继卫星星间天线指向计算结果Fig.12 Pointing calculation results of TDRS inter-satellite antenna
根据箭载终端和中继卫星天线指向可视弧段计算结果,可快速获取中继卫星支持航天发射任务弧段。本文和其他研究成果的分析对比如表1所示。本文完成了中继卫星天线和终端天线相互指向的闭环分析,可根据计算结果快速获取中继卫星支持弧段,缩短中继卫星支持航天发射测控任务响应时间。
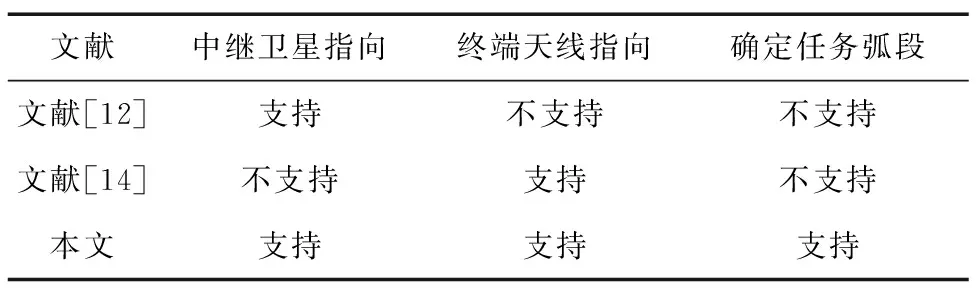
表1 本文和其他研究成果的对比Tab.1 Comparison between the proposed research results and other research results
5 结束语
以中继卫星支持商业航天发射测控任务为背景,开展中继卫星和终端天线指向算法研究,并将算法进行可视化呈现,可结合火箭弹道和发射参数,快速完成中继卫星和箭载终端天线指向角度计算结果。根据计算结果,确定中继卫星任务可视弧段,对中继卫星支持商业航天发射任务能力进行快速分析评估。
猜你喜欢
机械工程师(2023年9期)2023-09-15
电子设计工程(2022年24期)2022-12-23
光学精密工程(2021年8期)2021-10-04
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
传媒评论(2017年8期)2017-11-08
电信科学(2017年6期)2017-07-01
航天器工程(2015年3期)2015-10-28
四川建筑(2015年4期)2015-06-24
电子设计工程(2015年16期)2015-02-27
电子设计工程(2012年9期)2012-02-15
