
计及电网工程全寿命周期的轻量化三维模型自动化校验
2023-10-10 08:10张爱军邵雪瑾王新新
沈阳工业大学学报 2023年5期
张爱军, 白 英, 邵雪瑾, 王新新
(1. 河海大学 能源与电气工程学院, 南京 210098; 2. 宁夏宁电电力设计有限公司 变电设计中心, 银川 750000)
随着我国电力设计行业的发展,输变电工程项目设计过程中诸多创新性数字化技术也逐渐投入应用,并取得了若干探索性成果.在电力设计领域,三维设计已成为了重要的技术应用,同时也令三维交底的重要性越发凸显[1].国家电网公司指出,在输变电工程的建设施工阶段,以电力三维轻量化模型为代表的三维设计交底成为电力设计领域不可忽视的关键环节[2].但由于目前三维设计交底的校验水平不足,且缺乏自动化及数字化方法,因此在考虑电网工程全寿命周期前提下的三维设计交底实际完成情况仍不理想.
输变电工程的三维设计交底与其数据密切相关.电网信息模型(grid information model,GIM)的设计标准要求在输变电工程的设计过程中,基于通用模型对电力设备设施开展精细化建模,由此促进建筑信息模型(building information model,BIM)得到充分利用.BIM可以通过与电力设计数据的交互完成对输变电工程设计的数字化管控,从而实现对项目设计的合理协调[3].然而,仅依靠BIM完成三维模型校验存在获取数据成本较高且效率偏低的问题.当前主流方法是将点云与BIM相结合,进而辅助人工完成数据的获取并实现三维模型校验[4].点云主要是根据属性划分数据,提取点特征后,将所得特征内的三维几何属性输入到分类模型中进行标签分类,从而获得相应的判定结果.WANG等[5]针对城市激光雷达数据,重点提取像素特征进行比较,并通过随机森林(random forest,RF)分类器完成特征分类;CHEN等[6]采用具有混合核函数的支持向量机(support vector machine,SVM)实现对点云特征的语义分类;徐国艳等[7]针对驾驶障碍物检测的效率问题,通过点云过滤与分割算法完成点云缩减,并利用改进的AdaBoost算法实现点云特征分类,以提高检测精度.但上述方法主要是依靠大量实验获取的先验知识来人工提取点云特征,并未考虑领域中各点间的关系,故难以避免噪声影响,由此导致结果不稳定.针对此问题,蒋腾平等[8]在三维点云中引入马尔可夫随机场(Markov random field,MRF),并结合残差学习(ResNets)完成特征的自动提取;而邵磊等[9]则在考虑多尺度体素的基础上,利用条件随机场(conditional random field,CRF)实现了点云特征的分类.然而此类方法虽然改善了分类性能,但仍依赖人工设定的规则,对于不同场景的泛化使用性能较弱,未能完全实现自动化应用的目的.
我国水资源总量为28 412亿m3,居世界第六位,人均水资源量约2 100 m3,为世界平均值的28%。人多水少、水资源时空分布不均是我国的基本国情和水情。水资源的有效开发利用有力地支撑了经济社会的快速发展,但总量不足和水质恶化导致的水资源短缺也成为制约我国经济社会发展一大“瓶颈”。
本文针对当前输变电工程三维设计交底过程中对三维轻量化模型自动化校验水平不足的问题,提出了一种计及电网工程全寿命周期的模型自动化校验方法.该方法在现有研究的基础上分析了三维交底数据的需求,并基于GIM模型构建输变电工程轻量化三维模型,通过SLAM技术进行相关工程三维点云的拼接重建;同时设计了改进的KPConv模型来实现点云语义的分割,且最终根据节点对比结果完成自动化校验.
首先,祭祖祀神可以满足民众祈求风调雨顺、五谷丰登、村族平安的愿望,即最基本的生存和生活愿望。“历代俗民的生存愿望与生活需求是民俗得以产生、传习、保存、应用的基本动因。”“百家宴”传承八百多年,其根本原因也在此,虽然在现代社会人们生活水平已经大大提高,但是这种诉求是永远无法完全满足的,而祭祖祀神可以使人们在精神上得到慰藉。
1 输变电工程三维设计交底
1.1 数据需求分析
输变电工程三维设计交底是由相关工程设计单位向建管单位、施工单位进行的设计方案交底.在工程全寿命周期中需要依据输变电工程建设的有关规程规范,在考虑整体设计思路、强条反措、施工标准工艺、新设备与新材料使用情况等全寿命周期设计要素的基础上,自动生成工程建设强制性条文库、质量监督检查表模板库以及标准工艺库等.
BIM技术可实现三维可视化,并将项目基础数据进行协同与共享,而工程量信息可以根据时空维度、构件类型等进行汇总、拆分及对比分析.因此在进行输变电工程三维设计交底时,需要在三维场景中对关键尺寸、角度和材质等信息进行标注并作出必要施工要点的批注,进而为交底过程中数据校验的精确定位提供依据.三维模型数据的标注如图1所示.
1) 传感器终端数据获取.在视觉SLAM中通过负载的视觉传感器终端获取数据并读取完成预处理,进而生成局部三维点云.
患者得到以上实惠,靠的是“大医星海”APP。此APP可用于预约挂号及支付管理、候诊管理和智慧导诊、会诊转诊,以及电子病历及报告查询,也在开放接口实现了对接第三方医疗及健康类细分服务的作用。患者、医生、医院三位一体是软件特色,服务模块主要包含“门诊业务”,提供自诊、预约挂号、支付服务、候诊管理、体检套餐、床位信息等;“我的医生”端口,可提供医患在线图文语音会话、通讯录管理、消息群聊,报告查询,提供就诊化验、体检数据查询;“我的”端口,则能提供就诊记录查询、健康卡管理、服务订单、住院意见反馈,等等。
1.2 输变电工程轻量化三维模型
1.2.1 GIM模型解析技术
本文引入GIM技术来构建相关工程的轻量化三维模型.GIM梳理共性需求,且将可传承性的输变电工程信息加以规范,进而建立统一的模型框架及描述方式,实现不同平台的采集及应用.
GIM文件内存储了输变电工程的三维设计成果,包括三维模型和数字化参数.其中电气设备由GIM交互规范规定的基本图元组成,文件中具体描述了其位置空间与尺寸[10-11].变电工程三维设计成果中的土建部分以IFC格式存储在GIM文件中.但由于IFC文件对模型的描述没有GIM文件直观,因此需要研究其对模型位置空间尺寸的存储规则或通过在GIM文件中引入特殊属性描述的方式,对土建部分模型的位置空间尺寸进行描述,以实现对该部分模型的关键数据提取.
“李铁夫年八十以后所作”一印原石现存我馆,边款“铁夫先生社长八十寿,叔厓敬祝,一九四九年十一月”,叔厓即钱瘦铁⑥。所以,6件钤有此两印的作品(有3件同时署有“八十八老人”款)都为当时书写的作品,即创作时间为:1949年11月。
1.2.2 三维模型轻量化
输变电工程的三维模型复杂程度高且数据规模庞大,为了能在用户终端设备上快速显示三维模型,实现模型的高效浏览和交互,需要研究一种多层次的三维轻量化图形平台.该平台在保证三维模型对象可用性的前提下,还可对原始模型数据进行压缩、过滤及优化,以减少模型的规模、降低内存使用量及加快显示速度.
SLAM技术主要通过移动机器人的视觉传感器完成对未知环境的位置估计,是建立语义地图的核心,可直接影响到点云拼接重建的质量.该技术主要由5个单元渐次构成:传感器终端、前端、后端、回环检测以及语义地图[13-14].具体分析如下:
以往4D模拟均依托处理过的模型进行分析,存在信息丢失的问题.而本项目使用国网公司首批试点工程形成的三维数据,并应用GIM模型以保证结构、模型和属性的完整.所建立的输变电工程轻量化三维模型如图2所示.
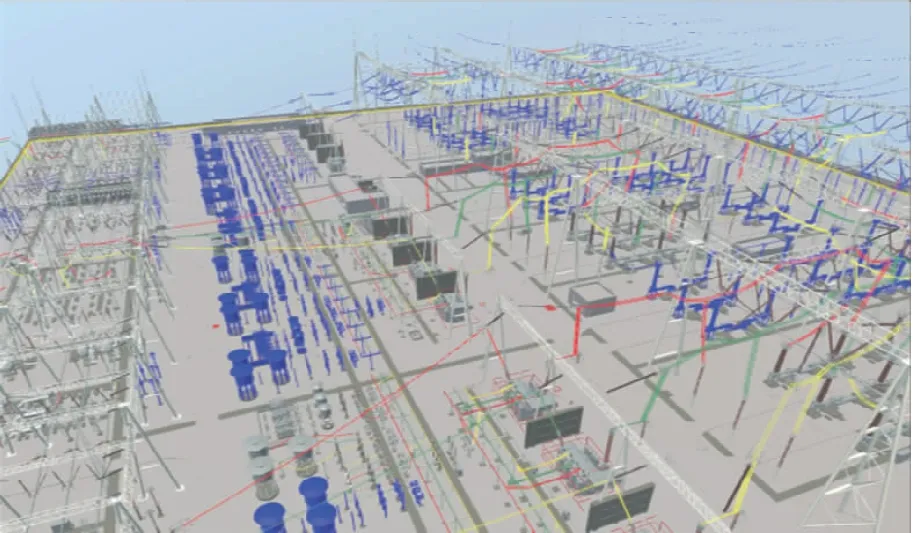
图2 输变电工程轻量化三维模型Fig.2 3D model of power transmission and transformation project
2 三维模型点云拼接重建
在对轻量化算法研究的基础上,为了减少模型渲染过程中的数据传输量,采用三维瓦片处理技术[12]在服务端将一个大场景切割成不同等级和范围的瓦片.而客户端则根据当前屏幕显示的区域与视角距离进行动态按需获取,并在客户端进行加密缓存及同步更新,从而有效解决网络传输数据量较大的问题,且对性能进行全面优化.
男人说着就在女人脸上亲了一口,女人搂着男人的脖子嗲声嗲气地说:“你还说!人家这不是在乎你吗?哦,我忘了告诉你了,我那天在珠宝店看到一串项链,可漂亮了!”
你们具有承担责任的能力(包括心理能力和行动能力)吗?爱情不是只有甜蜜和温馨,也有意外和伤害。意外怀孕了,你们有能力解决吗?争风吃醋大打出手了,你们有能力去解决吗?吵架分手后,若其中一方一哭二闹三上吊,你们有能力化解吗?没有。那么,同学们,请问,现在的你们适合恋爱吗?
2) 传感器前端位姿估计.该单元的作用在于当相机发生位移时,通过帧间变换对所获取的每帧图像进行位姿估计,从而得到相机的位移轨迹,以实现即时跟踪.本文采用特征点法完成位姿估计,并通过对特征点的提取和匹配实现对SLAM技术的改进.特征点的提取需要描述图中关键点的坐标信息以及坐标与周围像素的关联性,然后提取图像中的可辨特征,再完成特征点匹配以估计位姿,从而建立稀疏性地图,实现多视角的点云拼接.
3) 传感器后端优化.当前端通过位姿估计完成相机初试位移轨迹预测后,考虑到位移中可能存在帧间误差和噪声导致的轨迹偏移误差,采用非线性优化方法来保证位移轨迹最优,进而建立最优语义地图.采用卡尔曼滤波方法完成非线性优化.
假设问题具有马尔科夫性,按照某时刻输入及观察状态计算现有的后验概率,即
(1)
词条Mi的权重为TF与IDF的乘积,即
X*=argmaxP(x|z)=argmaxP(z|x)P(x)
(2)
4) 回环检测.该单元主要用于分析相机位移过程中是否经过同一点位,可通过对比当前与历史的图像帧进行确认.而考虑到对图像直接进行特征匹配会造成计算资源的浪费,故采用词袋结构完成回环检测.同时为了提升区分度,还利用TF-IDF完成袋中节点的加权.假设总的词条数目为N,Ni表示某类词条出现的频次,则TF可表示为
在网络技术飞速发展的今天,面对大学生人格发展历程中可能出现的各种问题,所有的教育工作者都应牢记荣格曾强调的“教育及心理治疗的主要目的,并不是使求助者进入一种不可能的幸福状态,而是帮助他们树立一种面对苦难的、哲学式的耐心和坚定。”[3]
(3)
与之对应的IDF为
IDFi=ln TFi
(4)
式中:P(x)为先验概率;P(x|z)与P(z|x)分别为后验概率和似然概率.可通过后验概率实现寻优最大化,即
天气实况分析资料来自常规气象观测资料和NCEP/FNL 1°×1°再分析资料。其中常规观测资料为地面逐3 h资料,高空逐12 h资料;航空气象自动观测资料(以下称为AWOS)为逐1 min观测资料,包括风场、气压、气温、降水量等气象要素;形势场分析和中尺度模式WRF模拟资料均采用NCE/FNL 1°×1°逐6 h再分析资料。
Wi=TFi×IDFi
(5)
由此可得到表征全部词条权重的集合
C={(M1,W1),(M2,W2),…,(Mn,Wn)}
(6)
依照计算的相似性开展评估,若预测图像与目标图像帧的相似度超过设定值,则判断回环发生的概率较高.为了防范偶发性,还需要完成连续检测才能最终确定,并通过非线性优化消除误差.
为构造“反事实情形”从而使实施过境免签政策的分组与对照组具有共同趋势,本文采用倾向得分匹配法进行匹配。采用马氏距离方法进行一对一的倾向得分匹配,结果如表3,即模型(2)所示。比较匹配前后结果可以发现,相比匹配前的数据,匹配后的数据的均值偏差、中位数偏差均显著降低,匹配效果较好(表4)。进而采用匹配后的数据再次进行共同趋势检验,表2模型(3)表明依据匹配后的数据,政策虚拟变量并不显著影响入境旅游人次,即匹配后的数据满足共同趋势假定。
3 三维模型自动化校验
3.1 KPConv模型原理及改进
在二维图像卷积理论的基础上,对三维点云进行KPConv卷积操作[15].将点云中的某点作为球心,从而构建球状卷积核,并针对核内三维坐标点进行特征整合求解,即KPConv卷积的核心在于核函数的求解.
首先设定固定半径为R的球状卷积核邻域,并建立K个核心点k0~kK-1,同时获得K个初始化权重W0~WK-1.然后对于核内任意一点y,核函数G(y)可通过加权求和得到,其中求和权重满足
(7)

5) 语义地图建立.在原有项目中增加自建节点,集成SLAM技术中的RGB-SLAM3,从而完成点云的重建并建立语义地图.利用各类标签表征物体的类型与坐标,实现精准辨识及人机交互.
由此,通过KPConv卷积操作可以将输变电工程轻量化三维模型点云的空间分布纳入特征运算中,以解决空间的不连续性问题.同时令该模型获取三维模型的局部特征,进而实现对三维模型的直接性语义学习.

(8)
3.2 KPConv网络结构及改进
KPConv网络结构主要由编码器和解码器组成.编码器通过对残差网络进行修改得到,其包含3个大小分别为1×1、3×3和1×1的卷积模块串联结构,能够实现对输入特征的降维、变换与升维.编码器结构如图3所示,图中Dimi和Dimo分别表示输入与输出特征的维度,Dimb则表示3×3卷积层输入和输出的特征维度.
8月施肥处理下禾本科和莎草科DM载畜量最高(56.66和14.00羊单位/hm2),补播处理下豆科DM载畜量(13.33羊单位/hm2)显著高于施肥和CK(P<0.05)。9月份施肥对莎草科DM载畜量(8.54羊单位/hm2)促进作用显著高于补播和CK(P<0.05),补播对禾本科和豆科DM载畜量促进作用最强(38.14和8.63羊单位/hm2)。6,7和9月补播对禾本科、豆科和莎草科DM载畜量的促进作用最佳,8月施肥对禾本科和莎草科的促进效果最好。

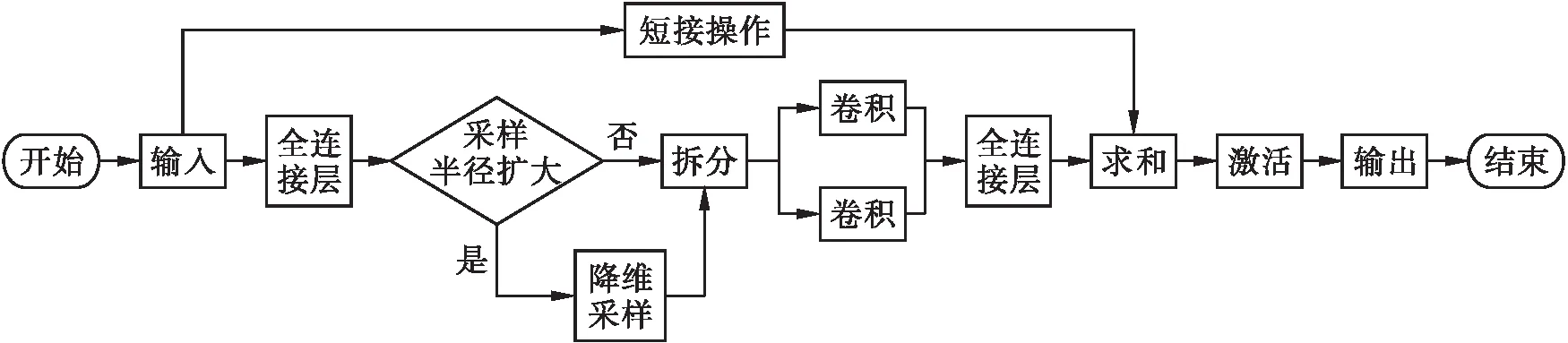
图4 KPConv模型解码器结构Fig.4 Decoder structure of KPConv model
3.3 自动化校验
在完成输变电工程三维轻量化模型的点云语义分割后,与三维可视化系统进行连接,通过对国网公司工程三维设计成果数据进行对比完成自动化校验,校验结果示例如图5所示.
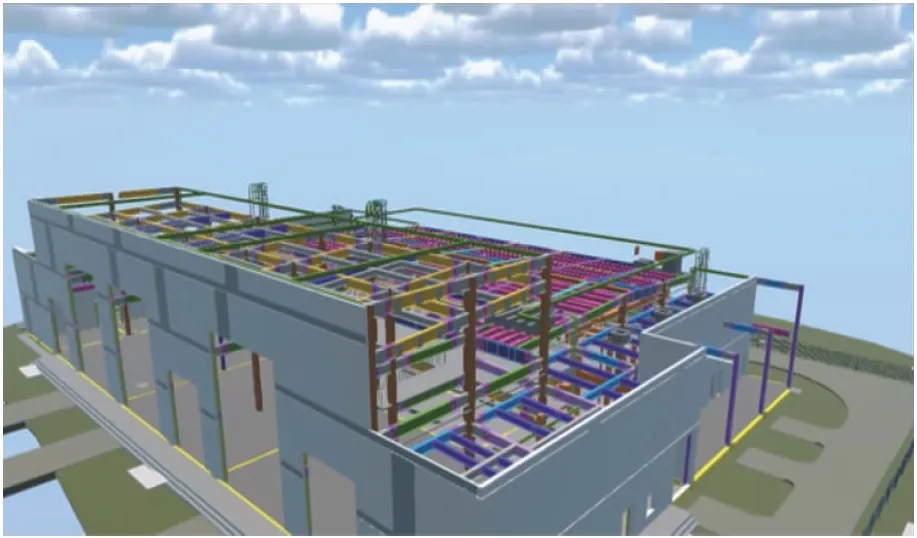
图5 自动化校验示例图Fig.5 Example diagram of automatic calibration
自动化校验的主要流程如下:
1) 点云显示.将点云的三维空间映射至系统的二维界面进行展示,以便于对比观察.
表4中,M1为H1的检验结果。其中,FS与RD显著正相关(β=0.0018,p<0.01),现金冗余可有效支持研发投入,H1得到验证。
2) 实景展示.模拟位移和观察视角变动,展示实景及虚拟现实效果.
3) 重建验证.基于SLAM技术动态显示工程实景,验证重建过程.
4) 语义检测.结合改进KPConv模型与点云显示技术,自动计算语义信息对比结果并通过可视化系统进行展示.
4 实验分析
4.1 实验环境
为了检验本文自动化校验方法的有效性,采用开源三维语义库Torch-Points 3D对所提出的改进KPConv模型进行测试.实验数据来源于某省2019年4月~2022年4月的输变电工程三维设计模型数据,实验硬件环境如表1所示.

表1 实验硬件环境Tab.1 Hardware environment of experiment
4.2 实验结果
本次实验的源码基于Torch-Points 3D 1.0.1版本设计,将数据集按照9∶1的比例划分为训练集和测试集,且每训练完1个epoch便开始进行测试.其中,1个epoch包含输入点云、定义标签、标签对比、计算损失函数以及反向传播5个步骤.设定的模型参数如表2所示,优化器选用随机梯度下降法,分割损失函数使用负对数似然函数.

表2 模型参数设置Tab.2 Settings of model parameters
为了对比改进前后的KPConv模型校验效果,将两种模型均交并比(mean intersection over union,MIOU)值随迭代次数的波动情况进行对比,所得结果分别如图6、7所示.

图6 改进前KPConv模型的性能Fig.6 Performance of KPConv model before improvement
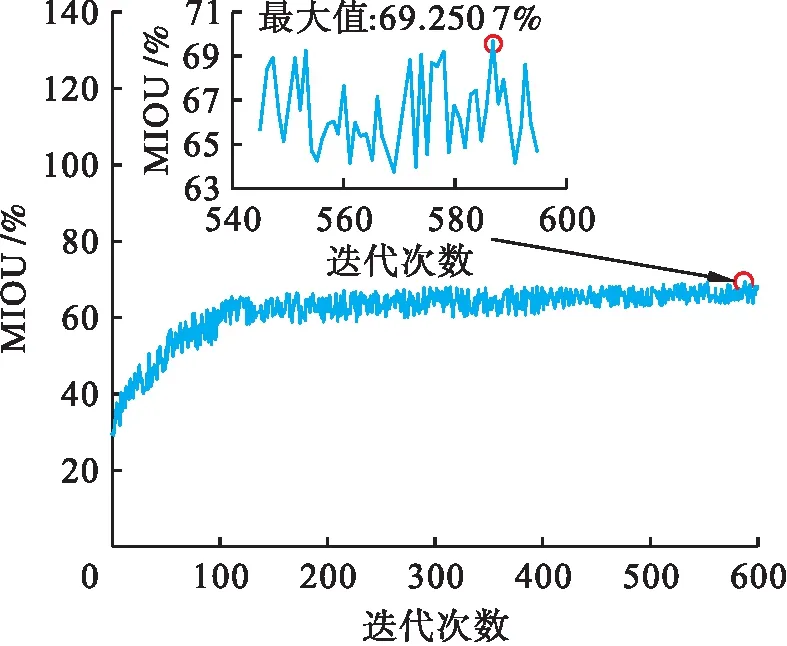
图7 改进后KPConv模型的性能Fig.7 Performance of KPConv model after improvement
由图6、7可以看出,改进前KPConv模型MIOU最大值为65.662 2%;而改进后模型MIOU最大值则可达69.250 7%.通过对比可知,改进后KPConv模型大幅减少了网络参量,提高了运算效率.而通过MIOU最大值的对比可以看出,改进后模型相比改进前具备更优的校验精度及良好的自动化校验性能,更适用于输变电工程轻量化三维模型的自动化校验.由于MIOU曲线与拟合曲线的对比结果可以在一定程度上表征校验误差[16],为了验证模型校验误差,将改进前后KPConv模型的MIOU曲线与其拟合曲线的均方根误差(RMSE)进行对比,所得结果如表3所示.由表3可以看出,改进后KPConv模型MIOU曲线的RMSE低于改进前KPConv模型MIOU曲线的RMSE,表明改进后KPConv模型的稳定性更好.所得自动化校验结果在三维可视化系统中的展示效果如图8所示.从图8中能够清晰地看到三维交底效果较为理想.

表3 模型稳定性对比Tab.3 Model stability comparison

图8 自动化校验结果在三维可视化系统的展示图Fig.8 Display drawing of automatic calibration results for 3D visualization system
5 结 论
本文提出了一种计及电网工程全寿命周期的轻量化三维模型自动化校验方法.通过分析基于BIM技术三维设计交底自动化校验的数据需求明确了数据来源,并在GIM模型的基础上建立了轻量化三维模型,利用改进SLAM技术完成三维点云的拼接重建.通过改进KPConv模型的求和权重求解方法与解码器的网络结构,实现了快速三维点云的语义分割,且最终结合可视化系统完成自动化的校验及展示.实验结果表明,所提校验方法具有良好的校验精度及效率,能够基于BIM技术完成相关工程轻量化三维模型的自动化校验,有助于施工前三维交底工作的顺利开展,对电网工程的三维设计具有重要意义.
猜你喜欢
精密成形工程(2022年2期)2022-02-22
商品与质量(2019年33期)2019-11-28
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中国铸造装备与技术(2017年6期)2018-01-22
专用汽车(2016年1期)2016-03-01
电测与仪表(2015年1期)2015-04-09
电测与仪表(2015年19期)2015-04-09
山西建筑(2015年30期)2015-04-08
设备管理与维修(2015年9期)2015-03-16
