基于机器视觉的轨道交通接触网旋转 双耳状态检测方法*
2023-10-08 01:11杨红梅
城市轨道交通研究 2023年9期
杨红梅
(四川铁道职业学院铁道工电学院, 611732, 成都∥讲师)
0 引言
轨道交通接触网系统结构复杂,零件繁多,绝大部分处于裸露状态,不仅受外部条件影响,而且内部受力也各不相同,易发生故障,状态检测也十分困难。
旋转双耳作为接触网腕臂结构支撑装置中的重要承力部件,其状态直接影响支撑装置的结构强度。为提高腕臂结构稳定性,进而为列车运行的安全性和可靠性提供重要支撑,有必要对其状态进行检测,发现故障及时更换维修。
当前,基于机器视觉的弓网系统图像检测主要集中于接触网几何参数检测和受电弓滑板检测等。文献[1]利用模糊熵和Hough变换实现了受电弓滑板裂纹检测。文献[2]提出了基于三维点云连续线性体特征的接触网几何参数检测。文献[3]提出了基于图像处理和双BP(反向传播)神经网络的电气化铁路接触网立柱标识牌识别算法。文献[4]探索了基于图像处理的接触网零部件状态检测。在智能算法方面,文献[5]提出了基于Faster R-CNN(快速区域卷积神经网络)的接触网吊弦故障检测。文献[6]提出了基于深度学习的接触网顶紧螺栓缺陷检测方法。文献[7]提出了Hu不变矩的绝缘子故障检测方法。文献[8] 提出了基于卷积神经网络的接触网绝缘子缺陷检测方法。本文提出了基于机器视觉的轨道交通接触网支撑装置旋转双耳状态检测方法。
1 旋转双耳故障检测流程
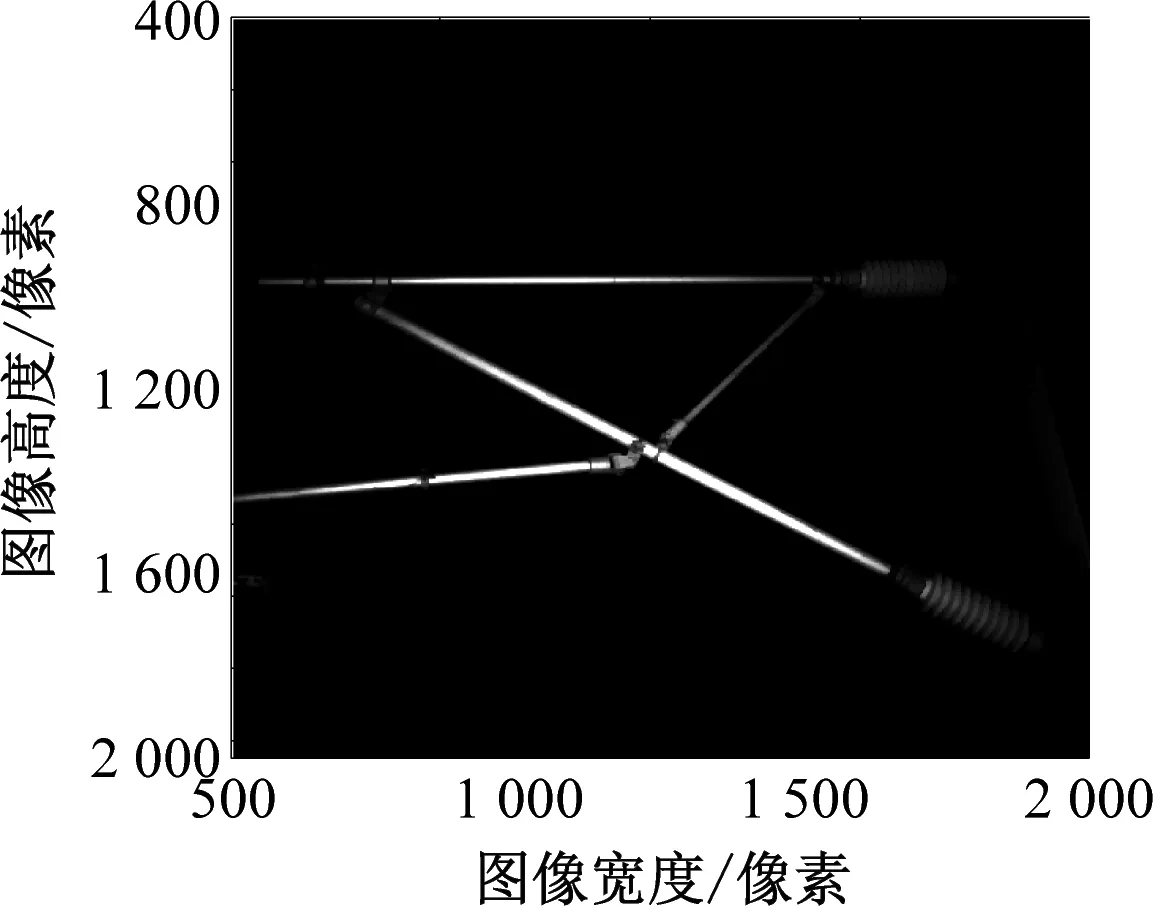
轨道交通接触网系统腕臂结构如图1所示。本文以轨道交通接触网悬挂装置全局图像为分析对象,提出了旋转双耳故障检测流程,如图2所示。首先对待检测图像基本图元进行预分类,接着分别实现旋转双耳的初识别及耳片精确定位,最终利用耳片局部图像的Hough变换直线检测结果判断双耳状态。

图1 轨道交通接触网系统腕臂结构
2 待检测图像预分类
由于待检测全局图像包含了杆状物、旋转双耳、绝缘子等所有悬挂装置,图元信息复杂,有必要将待检测图像进行预分类。基本图元预分类效果图如图3所示。后期识别与检测均在旋转双耳类进行,以充分减少其他图元信息的干扰。分类过程如下:
a) 原始图像
1) 对图像进行预处理(对比度调节、增强等),突出接触网腕臂结构杆状物边缘直线特征。
2) 对预处理后的图像进行Hough变换直线检测。因杆状物边缘存在不清晰状态,直线检测结果中会出现不连续小直线,利用各直线间的距离及斜率等信息对Hough变换直线矩阵进行聚类,得到杆状物的实际端点。
3) 确定对应关系(聚类后的直线与待检测图像中杆状物边缘),实现杆状物定位及归类。
4) 确定杆状物类后,图中剩下图元即为旋转双耳类和绝缘子类,完成待检测图像的图元预分类。
3 旋转双耳初识别
由于旋转双耳存在角度、尺寸上的多变性,故可利用具有旋转、尺度不变性的仿射不变矩对旋转双耳进行识别。
3.1 仿射不变矩
仿射不变矩由Hu不变矩构造的中心矩演变而来。将坐标原点平移到目标轮廓区域的中心,通过对目标区域仿射不变特征的提取,实现目标识别。仿射不变矩相关计算公式参见文献[7]。
3.2 仿射不变矩计算
将预分类结果中剩下的旋转双耳类和绝缘子类按连通区域逐个标记,根据文献[7]中的计算公式计算各连通区域(如图3 c)所示)的仿射不变矩。选取不同旋转双耳模板(见图4),计算不同模板的仿射不变矩,结果如表1所示。

表1 旋转双耳模板仿射不变矩
a) 高对比度旋转双耳
从表1不同模板的仿射不变矩结果可看出,旋转双耳在不同角度、尺度、对比度时,能较好保持旋转双耳特征的不变性。
3.3 旋转双耳初识别
在得到待识别区域和模板的仿射不变矩后,计算两者仿射不变矩的距离,通过距离阈值初识别旋转双耳,该距离计算公式为:
(1)
式中:
L——模板和待匹配目标之间的仿射不变矩距离;
P——待检测目标的仿射不变矩;
Q——模板目标的仿射不变矩。
大量试验表明,准确识别旋转双耳的距离阈值应选取同一模板距离总和的0.1倍。
图3 c)中6块待识别连通区域与各旋转双耳模板间的仿射不变矩距离如表2所示。表中Li(i取值为1~6)表示各旋转双耳模板放射不变矩与连通区域i的距离。

表2 连通区域与旋转双耳模板仿射不变矩距离
由表2可知,利用图4所示的旋转双耳模板对图3 c)进行匹配,均可得出连通区域2与模板间的距离最小,且与同组距离存在明显差异。根据距离阈值可判断连通区域2为旋转双耳。该试验表明,基于仿射不变矩的旋转双耳识别方法对模板的选取不敏感,识别性能良好。
4 旋转双耳耳片精确定位
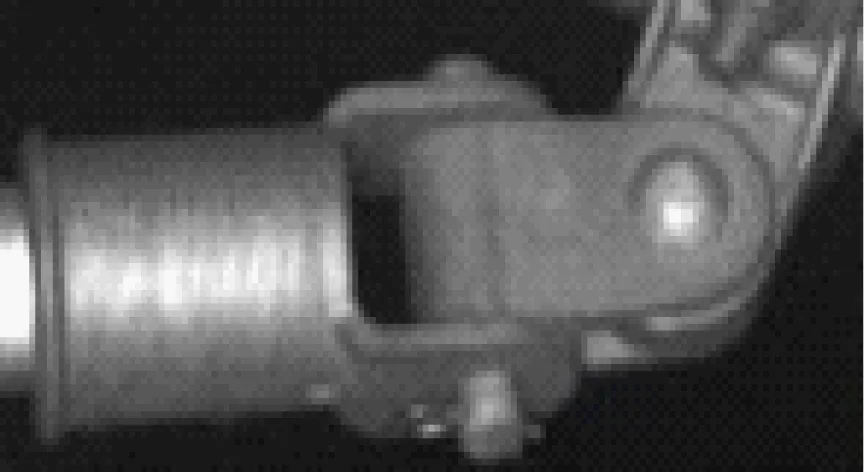
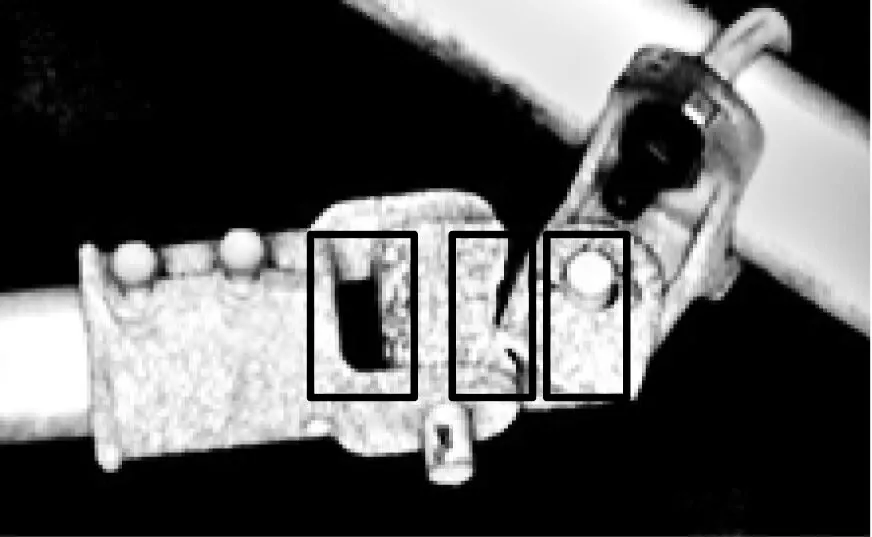
应用上述方法进行旋转双耳初识别,可得到如图5所示的旋转双耳局部图像。由图5可见,断裂特征大部分出现在耳片中间范围,两侧有螺钉、R型栓等。若直接在初提取的旋转双耳图像中识别断裂特征,螺钉、R型栓等固有特征会对检测产生很大干扰。为使断裂检测判据更具准确性和通用性,有必要在检测前,识别及排除旋转双耳的固有特征,并同时实现耳片的精确定位。
a) 严重断开双耳
如图5中矩形框所示,旋转双耳固有特征可大致描述为圆形和矩形。利用Hough变换进行圆形和矩形检测,可得圆形和矩形的中心及半径等信息,由此即可识别并定位其固有特征,以消除其对耳片检测的影响,同时可得到耳片检测中断裂特征可能出现的范围。
4.1 Hough变换圆形和矩形检测
为快速判断一条闭合轮廓线是否为圆形,通过Hough变换先对检测出来的闭合轮廓线分别沿水平和垂直两个方向进行扫描,然后对扫描结果进行Hough变换得到圆形的两条直径,再由两条直径的交点得到圆心。最后利用轮廓线的像素坐标估计圆半径r:
r=max((xmax-xmin)/2,(ymax-ymin)/2)
(2)
式中:
xmax——轮廓线x轴坐标最大值;
xmin——轮廓线x轴坐标最小值;
ymax——轮廓线y轴坐标最大值;
ymin——轮廓线y轴坐标最小值。
对于Hough变换矩形检测,首先通过Hough变换对矩形轮廓曲线进行投票,得到M1(m1,θ1)、M2(m2,θ2)、M3(m3,θ3)、M4(m4,θ4) 4个峰值,其中,Mk为峰值,mk为矩形顶点k的坐标值,θk为峰值点k的角度。4个峰值则分别对应12、23、34和41这4条边。然后可判断每对峰值是否为一组对边,再判断两组对边是否垂直,最终判断其是否为矩形。
4.2 基于Hough变换的耳片固有特征识别
在对旋转双耳图像进行对比度调节等预处理后,可进行圆形检测,以识别螺钉固有特征。通过将半径参数设置为螺钉的半径范围,可得到旋转双耳螺钉的圆心坐标和半径。图5所示的旋转双耳断裂局部图像的螺钉识别结果如图6所示。
a) 断开双耳螺钉识别效果图
对旋转双耳图像进行边缘检测后,通过Hough变换矩形检测识别矩形固有特征,可求得其中心、长度和宽度信息。图5所示的旋转双耳断裂局部图像的矩形检测效果如图7所示,图中“十”字为其中心。

a) 断开效果图
4.3 耳片局部图像定位
根据上节所得的圆形和矩形的中心、半径、长度和宽度等信息,可定位断裂特征出现概率较大的耳片范围。为排除固有特征的干扰,且尽量保留较多耳片局部图像信息,设置以下定位原则:
1) 始于矩形边缘,向螺钉侧平移5个像素;止于矩形侧的螺钉内边缘,将其作为横坐标。
2) 矩形上下边缘分别向外平移5个像素,将其作为纵坐标。
3) 最终局部图像x轴顶点坐标x1—x4计算公式(式中各变量单位为像素)为:
x1=(o1+b/2+5,o1+a/2+5)
(3)
x2=(o1+b/2+5,o1-a/2-5)
(4)
x3=(o2-r1,o1+a/2+5)
(5)
x4=(o2-r1,o1-a/2-5)
(6)
式中:
o1——矩形中心x轴坐标值;
o2——螺钉中心x轴坐标值;
a——矩形的宽度;
b——矩形的长度;
r1——螺钉半径。
5 旋转双耳耳片断裂检测
在耳片精确定位的基础上进行断裂检测。正常耳片局部图像的灰度分布较均匀。如果耳片出现断裂,断裂处的灰度将发生较大变化,呈现出具有一定方向的线性边缘特征。通过大量试验分析得出,当Hough参数空间中大于10的特征点数(Nmax>10)占非零特征点数(Nmax≠0)的百分比S为0.5%及以上时,耳片存在较明显的断裂特征。具体判据如下:

(7)
试验表明,该判据在最大限度排除边界、孤立噪声等非断裂特征的情况下,可较准确识别耳片断裂。用上述方法对正常耳片、断裂耳片和裂纹耳片进行检测,效果如图8所示。
a) 正常耳片直线检测结果
图8 a)和图8 b)中,S=0,不存在满足判据式(7)的明显直线特征,故判断该耳片正常。图8 c)和图8 d)中,S=13.67%,存在满足判据式(7)的明显线性特征,故判断该耳片断裂。图8 e)和图8 f)中,S=0.98%,存在满足判据式(7)的线性特征,故判断此耳片存在裂纹。
根据中国国家铁路集团有限公司发布的《接触网悬挂状态检测监测装置(4C)运用管理指导意见》及相关技术条件,检测车以规定速度运行,因而其图像采集速度可根据需要予以调整,以满足检测速度要求。检测算法耗时统计如表3所示。

表3 旋转双耳检测试验计算耗时
列检车采用本文检测方法获取接触网图像的检测结果如表4所示。误检的主要原因为旋转双耳被遮挡的面积过大,导致其仿射不变特征与模板特征距离大过阈值而漏检,调整拍摄角度可改善此问题。
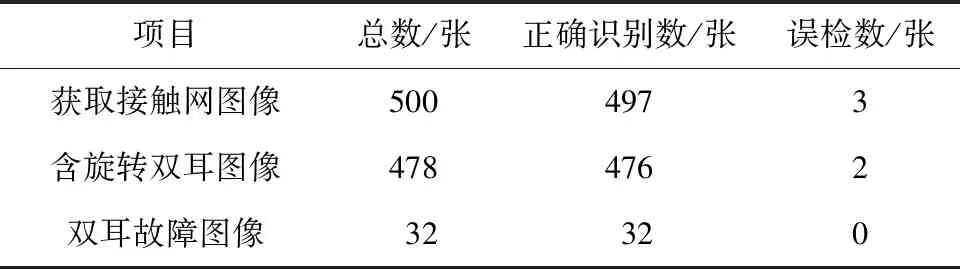
表4 旋转双耳检测统计结果
6 结语
针对轨道交通接触网支撑装置旋转双耳断裂自动识别问题,结合图元预分类和仿射不变矩初识别旋转双耳,实现了对耳片检测干扰的控制。利用Hough变换识别耳片固有特征并对耳片局部图像进行精确定位,进一步提高了检测结果的可靠性。最终以耳片图像的Hough变换参数分布特征作为检测判据,实现了断裂和裂纹状态的准确判断。试验表明,该方法降低了全局图像中旋转双耳断裂特征的检测难度,同时提高了检测效率与准确性,为轨道交通接触网关键部件的故障诊断提供了有效支撑。
猜你喜欢
家庭科学·新健康(2023年9期)2023-10-01
西安航空学院学报(2022年1期)2022-07-05
航空工程进展(2022年2期)2022-04-24
科学技术创新(2022年7期)2022-04-02
家庭科学·新健康(2022年1期)2022-02-02
云南画报(2021年10期)2021-11-24
紫禁城(2020年5期)2021-01-07
上海铁道增刊(2017年3期)2018-01-22
家庭科学·新健康(2016年11期)2016-11-23
西南交通大学学报(2016年3期)2016-06-15