高压直流输电线路单端智能故障定位方法
2023-10-07 03:41杨玉萍田海鹏陈伟哲
电力系统及其自动化学报 2023年9期
杨玉萍,吴 浩,田海鹏,陈伟哲,宋 弘
(1.四川轻化工大学自动化与信息工程学院,自贡 643000;2.人工智能四川省重点实验室,自贡 643000;3.阿坝师范学院电子信息与自动化学院,阿坝 624000)
电能的传输依赖于输电线路,其中跨省市的远距离送电通常采用高压直流HVDC(high voltage direct current)输电线路。由于传输距离通常较远,跨越地区的地理环境、气候环境会影响高压直流输电线路发生故障的概率[1]。因此,快速准确地找到故障位置,不仅能让人工巡线的难度大大减小,还可以加快故障修复的速度,在短时间内恢复稳定供电[2]。
目前传统故障定位方法多采用行波法,其原理简单,通过监测终端测量到的行波传播到达时间结合波速来计算故障距离[2]。行波法具有响应速度快、受线路参数影响小的优点,但其定位精度的关键在于波头的识别和波速的正确估计[3]。行波法又可以分为双端法和单端法[4-5]两类。其中,双端法需要采用全球定位系统GPS(global positioning system)等通信技术来确保线路两端信息同步;而单端法不需要双端通信,使用成本更低。影响单端法定位精度的关键因素在于对首行波和反行波前沿信号的检测及其性质的识别[6]。文献[7]提出利用相关函数来估计故障时入射波与反射行波之间的时间延迟,实现单端故障定位,该方法不受故障类型的影响,但文中并未对抗噪性能进行验证,噪声环境下是否对算法定位精度有影响有待考证。文献[8]基于单端定位法提出了利用奇异熵参数优化变分模态分解算法结合Teager 能量算子对行波前沿信号到达时刻进行检测,同时波速则由选择的固有模态IMF(intrinsic mode function)的中心频率和行波相关特性决定,从而实现故障定位,该方法在一定程度上解决了弱故障特征下行波色散严重的问题,提高了定位精度,但波速估计取决于线路参数,故线路参数不准确可能导致定位误差。文献[9]提出了利用数学函数根据位置情况来准确估计波速,解决了传统方法中只将波速视为恒定值的缺陷。虽然大量已有算法对行波法进行了一定改善,但依然存在行波波头难以精确辨别、行波在传播过程中存在严重损耗、噪声干扰对定位精度有影响等问题。
近年来,随着人工智能领域的发展,智能算法也被不断引入到输电线路故障诊断与定位中。智能故障定位算法注重挖掘故障信息的深层特征,与传统方法相比对硬件设施的要求更低。已有的智能故障定位方法中,大多数为基于浅层神经网络的定位模型,难以深度挖掘故障信息,导致定位模型的泛化能力不足。文献[10]对故障信号进行希尔伯特-黄变换HHT(Hilbert-Huang transform),提取时间、能量和频率特征组成特征向量,再输入支持向量机SVM(support vector machine)进行训练,同时利用蝙蝠算法BA(Bat algorithm)优化SVM,实现故障的定位,该定位模型有较好的定位精度和一定的抗干扰能力,但在低采样频率下定位误差较大。文献[11]利用S 变换提取用于极限学习机ELM(extreme learning machine)学习的高频特征量,通过对ELM的训练和测试,最终实现故障定位,与人工神经网络ANN(artificial neural network)和支持向量回归SVR(support vector regression)两种定位模型相比,ELM的定位效果最佳,但该模型的泛化性能文中并未进行验证。文献[12]采集双端故障电压电流信号进行数据融合,对反向传播BP(back propagation)神经网络进行训练实现故障定位,但该方法需要采集双端数据,一定程度上增加了经济成本。文献[13]提出了利用S 变换结合粒子群优化PSO(particle swarm optimization)算法优化广义神经网络GRNN(generalized regression neural network)的故障定位方法,该方法采用的GRNN神经网络具有较好的鲁棒性,但该方法的抗噪声干扰性能仅能达到45 dB。为了更好地提取到故障信号的抽象特征,文献[14]提出了基于卷积神经网络CNN(convolutional neural network)的故障定位模型,利用CNN的回归机制实现故障定位,其本质类似于时间序列的预测任务。然而在处理时间序列任务上,循环神经网络RNN(recursive neural network)等递归神经网络更具优势,文献[15]提出了利用RNN 对故障特征进行自适应的深度提取,从而实现故障定位,但该方法的定位精度还有待提高。
针对上述智能故障定位方法存在的问题,本文提出基于S 变换组合特征能量和改进的一维卷积神经网络-门控循环单元1D-CNN-GRU(one-dimensional convolutional neural network-gated recurrent unit)的故障定位方法。首先对采集到的故障电压和电流信号分别进行极模变换提取线模电压和线模电流,然后对线模分量信号进行S 变换,提取特征频域能量,将电压和电流特征能量分别归一化后进行串联组合,形成组合特征能量向量,构造成组合特征能量矩阵。将特征矩阵输入至改进的1DCNN-GRU 模型进行训练和测试。其中,本文对网络的改进如下:首先设计了多尺度卷积模块代替了原始的单一输入层,使用多尺度卷积核提取不同精细度的特征,提高网络对特征信号的利用率;其次,为了减少模型的参数量和计算量,对网络进行轻量化改进,引入Ghost 模块并对其进行改进使其适用于一维数据,利用改进后的Ghost 模块替换原网络中的卷积层,实现网络的轻量化;最后,训练过程中利用Adam优化器代替传统随机梯度下降方式来有效更新网络权重,以达到提高1D-CNN-GRU故障定位模型的鲁棒性的目的。
本文主要贡献如下。
(1)利用组合特征能量表征故障位置信息,避免了行波波头难以提取的问题。
(2)充分发挥1D-CNN-GRU混合神经网络的优势,利用1D-CNN 实现特征的深度提取,GRU 实现故障位置的准确定位。
(3)对1D-CNN-GRU 混合神经网络进行了改进,设计了多尺度卷积模块提取不同精细度的特征,和1D-Ghost 替代传统卷积层,实现网络的轻量化。同时利用Adam优化器对1D-CNN-GRU网络权重进行更新。通过上述操作进一步提高定位模型的鲁棒性,实现高精度的故障定位。
1 双极高压直流输电系统模型
本文主要研究基于双极HVDC 输电线路的故障定位,在PACAD/EMTDC 仿真平台搭建双极HVDC输电线路仿真模型,如图1所示。

图1 双极HVDC 输电系统模型Fig.1 Model of bipolar HVDC transmission system
图1中,该模型的母线电压为500 kV;L1~L4表示平波电抗器;AB 段和CD 段表示两段长度均为500 km的架空输电线路;F1~F3为故障点,分别表示正极接地故障PGF(positive ground failure)、负极接地故障NGF(negative ground failure)和双极短路故障BPF(bipolar short-circuit fault),本文所提的故障定位模型主要考虑这3 种故障情况。通过对故障信号的分析,可进行故障定位研究。
2 S 变换组合特征能量提取
2.1 S 变换原理
S变换是一种时频分析工具[16],设x(t)为连续信号,则可定义S变换为
式中:S(τ,f)为S 变换;f为频率;τ为时移参数;ω(t-τ,f)为初始信号量对应的高斯窗函数。
设x(t)的离散形式为x(αT),其中α=0,1,2,…,N-1,x(αT)的傅里叶变换为X(n/NT),则离散S变换可表示为
式中:N为采样点总数;n,m=1,2,…,N-1;T为采样间隔。
离散信号经S 变换后可得到1 个复时频矩阵,称S矩阵,其中S矩阵的行代表频域信息,每行对应1 个频率,列代表时域信息。第n行的频率可以表示为
式中,fs为系统采样频率。
2.2 故障信号S 变换组合特征能量提取
对离散S 变换后的信号xi(t)进行能量特征提取,可以先求得S矩阵中每点对应的暂态能量,即
式中:Ein为某一单一频率下的单一采样点的暂态能量;Si为S矩阵中的某个采样点。
然后再对S矩阵第n行元素对应的能量求和,即对某一单一频率fn下各点能量求和,可表示为
式中,Wn为S变换第n行的频率对应的能量和。这样离散信号经过S 变换后得到的能量序列为W=[W1,W2,…,Wn]。
本文以图1中F1点故障为例,故障点距离首端100 km,过渡电阻为50 Ω,采样频率为100 kHz,在PACAD/EMTDC 仿真平台上运行,仿真运行时间为1.0 s,故障发生时刻t=0.5 s,采集原始的故障电压和故障电流信号。由于双极模型中出现接地故障时,正负极电压电流信号会出现耦合现象,因此需要对其进行解耦,得到线模电压和线模电流信号。引入凯伦贝尔变换矩阵进行解耦,即
式中:u0、u1为解耦后零模电压和线模电压;u+和u-分别为正极电压和负极电压。
对电流信号采用同样的解耦方式进行解耦得到线模电流。通过解耦得到的线模电压和线模电流波形如图2所示。

图2 故障行波线模分量波形Fig.2 Waveforms of fault traveling wave line mode component
采样窗口设置在故障前1 ms至故障后2 ms,对时间窗长为3 ms(300个采样点)的行波线模分量进行特征提取。故障发生前的电压电流处于稳定状态,故选择故障前1 ms的数据用来反映故障前的稳态信息;故障发生时在故障点处电压、电流会发生突变,产生的故障行波会在输电线路之间发生多次折反射,故选择故障后2 ms的数据用来反映故障后的暂态信息。选择3 ms 的时间窗长一方面是为了减小计算量,提高算法速度;另一方面是为了剔除冗余信息,300 个采样点的时间窗长可以反映故障行波多次到达端点测量装置的信息,从中提取到反映故障距离的特征信息。
S变换后的线模电压和线模电流的能量分布如图3 所示。本文采样频率fs为100 kHz,根据奈奎斯特采样定理,S 变换故障信号频率应为0.5fs,即50 kHz。
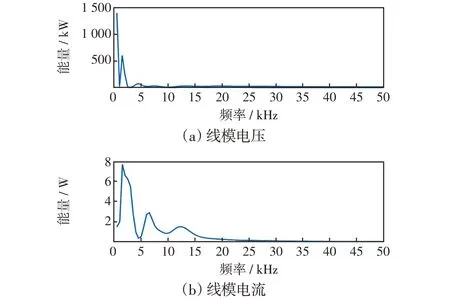
图3 各单元频率对应的能量分布Fig.3 Energy distribution at each frequency point
2.3 组合特征能量提取
由图3 可知,S 变换后的线模电压与线模电流的能量集中分布在0~25 kHz 频率附近,因此本文选取此频率段的能量来构造特征向量。具体步骤如下。
步骤1对采集到的原始电压、电流信号进行凯伦贝尔变换解耦,得到线模电压和线模电流分量。
步骤2取故障前1 ms 和故障后2 ms 共3 ms时间窗长的线模分量数据进行S 变换,根据式(6)可以求出S 变换后各频率点对应的能量序列W=[W1,W2,…,Wn]。由于S 变换后能量集中分布在0~25 kHz的频率附近,所以本文以0.5 kHz为间隔,选取0.5 kHz,1.0 kHz,1.5 kHz,…,25 kHz 共50 个特征频率对应的能量组合成一维向量,即W=[W1,W2,…,W50] ,其中W50为所选取频率上限25 kHz对应的能量。
步骤3线模电流与线模电压分别进行步骤2之后,可得到两个一维向量Wi=[Wi1,Wi2,…,Wi50]与Wu=[Wu1,Wu2,…,Wu50] ,分别表示线模电流特征频率能量与线模电压特征频率能量,将二者分别进行归一化到[0,1]之间,再组合形成新的一维特征向量M=[Wi,Wu]=[Wi1,Wi2,…,Wi50,Wu1,Wu2,…,Wu50] ,即M为本文的组合特征能量,其特征向量包含100个分量。
以图1中F1点发生故障为例,故障点距离首端100 km,过渡电阻为50 Ω,通过上述3 个步骤得到的组合特征的能量分布如图4 所示,可以看出,其能量分布特征明显。为此,进一步比较不同故障距离和不同过渡电阻下组合特征的能量分布。设过渡电阻为50 Ω,分别设置距离首端A 点50 km、250 km、300 km、450 km处发生故障,利用S变换提取组合特征的能量分布如图5 所示。设距离首端A 点150 km 处发生故障,过渡电阻分别设置为10 Ω、50 Ω、100 Ω、150 Ω,利用S变换提取组合特征的能量分布如图6所示。

图4 组合特征的能量分布Fig.4 Combined characteristic energy distribution

图5 不同故障距离组合特征的能量分布Fig.5 Combined characteristic energy distribution at different fault distances

图6 不同过渡电阻下组合特征的能量分布Fig.6 Combined characteristic energy distribution under different transition resistances
由图5 可知,不同的故障距离对应不同的组合特征能量分布,能量分布包含了与故障位置相关的信息,因此采用组合特征能量来进行故障定位研究是可行的。由图6可知,当过渡电阻小于100 Ω时,过渡电阻的变化对能量的分布并无太大影响,而当过渡电阻为150 Ω 时,对能量分布的影响较明显,可见过渡电阻对故障定位精度有影响。
3 改进的1D-CNN-GRU 混合神经网络模型
本文对1D-CNN-GRU 混合神经网络进行了改进,首先设计了一种多尺度卷积模块,替换了原始网络中的单一输入层模块。多尺度卷积核可以提取不同精细度的特征,提高网络对特征信号的利用率。其次,为了减少模型的参数量和计算量,对网络进行轻量化改进。引入Ghost 模块,并对其进行改进使其适用于一维数据,利用改进后的Ghost 模块替换原网络中的卷积层,实现网络的轻量化。最后,在训练过程中利用Adam 优化器代替传统神经网络中的随机梯度下降法来实现网络权重的更新,旨在提高模型的定位精度和鲁棒性。
3.1 改进的一维卷积神经网络
3.1.1 多尺度卷积层的设计
普通的卷积神经网络的输入层只有单一的卷积核,不能充分提取特征信息[17]。为了能够提取到输入数据中不同精细度的特征使网络获取到的初始特征信息更加完整,设计了一种多尺度卷积结构,如图7所示。

图7 多尺度卷积层Fig.7 Multi-scale convolutional layer
多层卷积设计了3 条支路,支路1 如图7 中最左边分支所示,卷积核大小为3×1,通道数为16;支路2设计了两个卷积核大小不同的卷积,尺度分别为1×1 和3×1,通道数分别为8和16,其中使用1×1 卷积核的目的是控制输出的通道数;支路3 设计了1 个池化层,进行下采样操作,目的是为了剔除冗余信息。3 个支路有共同的输入,输出则利用concatenate 将3 个支路的输出特征拼接在一起,作为下一个卷积层的输入。
3.1.2 Ghost_1D 模块
Ghost 模块是由Han 等[18]提出的一种新型神经网络单元模块,该模块中保留了部分传统卷积,利用该部分传统卷积生成少量通道数的特征图,再生成Ghost特征图。Ghost模块在降低计算量的同时,不会导致特征识别性能降低,是一种高效的新型卷积方式。
Ghost 模块结构如图8 所示。首先输入特征图(通过普通卷积操作生成少量特征图),设输入特征图X大小为C×H×W,其中C为通道数量,H为输入数据的高度,W为输入数据的宽度。经过M组K×K的卷积核处理,得到H′×W′×M的输出特征图Y′,其表示输出特征图具有M个通道,H′×W′为输出特征图的大小。然后再对Y′分别进行一次恒等映射和M次线性操作(Φ1,Φ1,…,ΦM)。其中,线性操作可表示为卷积运算,每个卷积核大小为d×d,输出通道数为(s-1)。因此,Ghost模块在运算过程中所需参数量可以表示为
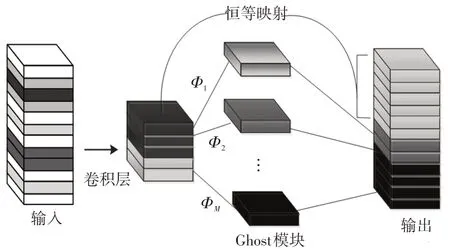
图8 Ghost 模块结构Fig.8 Ghost module structure
由于本文输入特征为一维特征,故将Ghost 模块中的卷积Conv2D 换成了Conv1D,其余操作不变。此时,输入特征尺寸变为C×H,Conv1D 卷积核为k-1,输出特征尺寸为H′×M,线性变换中的卷积运算的卷积核大小变为d×1。故本文所提Ghost_1D模块的参数量可表示为
3.2 门控循环单元
门控循环单元GRU(gated recurrent unit)由长短期记忆网络LSTM(long short term memory)发展而来,GRU 具有与LSTM 相同的优点,同时GRU 内部少了一个门控结构,其参数量更小、计算速度更快[19]。GRU单元结构如图9所示。门控循环单元主要由重置门rt和更新门zt构成,内部信息传递过程可用如下数学表达式表示:

图9 GRU 结构Fig.9 GRU structure
式中:xt为输入信号;ht为当前时刻的输出信息;ht-1为前一时刻的输出信息;Ht为t-1 时刻的候选隐藏状态;Wrx、WHh为权重矩阵;σ( )表示Sigmoid函数;rt为重置门,其功能是控制当前时刻的信息中的历史信息;zt为更新门,其功能是决定当前状态需要忘记的历史信息及需要接收的新信息。
3.3 改进的1D-CNN-GRU 混合神经网络
CNN 具有强大的抽象特征挖掘能力,而GRU善于挖掘数据在时间维度上的规律并解决了RNN存在的梯度爆炸等问题。因此,为了充分挖掘到数据的深层特征,进行精确的故障定位,本文提出采用1D-CNN与GRU混合的神经网络进行故障定位,通过1D-CNN进行故障特征的提取,利用GRU回归机制实现故障定位。Adam优化器是对梯度下降的优化,通过梯度均值(一阶矩估计)和梯度平方(二阶矩估计)共同决定当前权重的更新。本文在模型训练中引入了Adam 优化器,旨在提高1D-CNNGRU 故障定位模型的鲁棒性。本文所提的改进的1D-CNN-GRU网络结构如图10所示。

图10 1D-CNN-GRU 网络结构Fig.10 1D-CNN-GRU network structure
4 基于S 变换组合特征能量与1D-CNNGRU 的故障定位模型
4.1 基本流程
基于1D-CNN-GRU,本文设计的故障定位模型流程如图11所示。算法具体步骤如下。
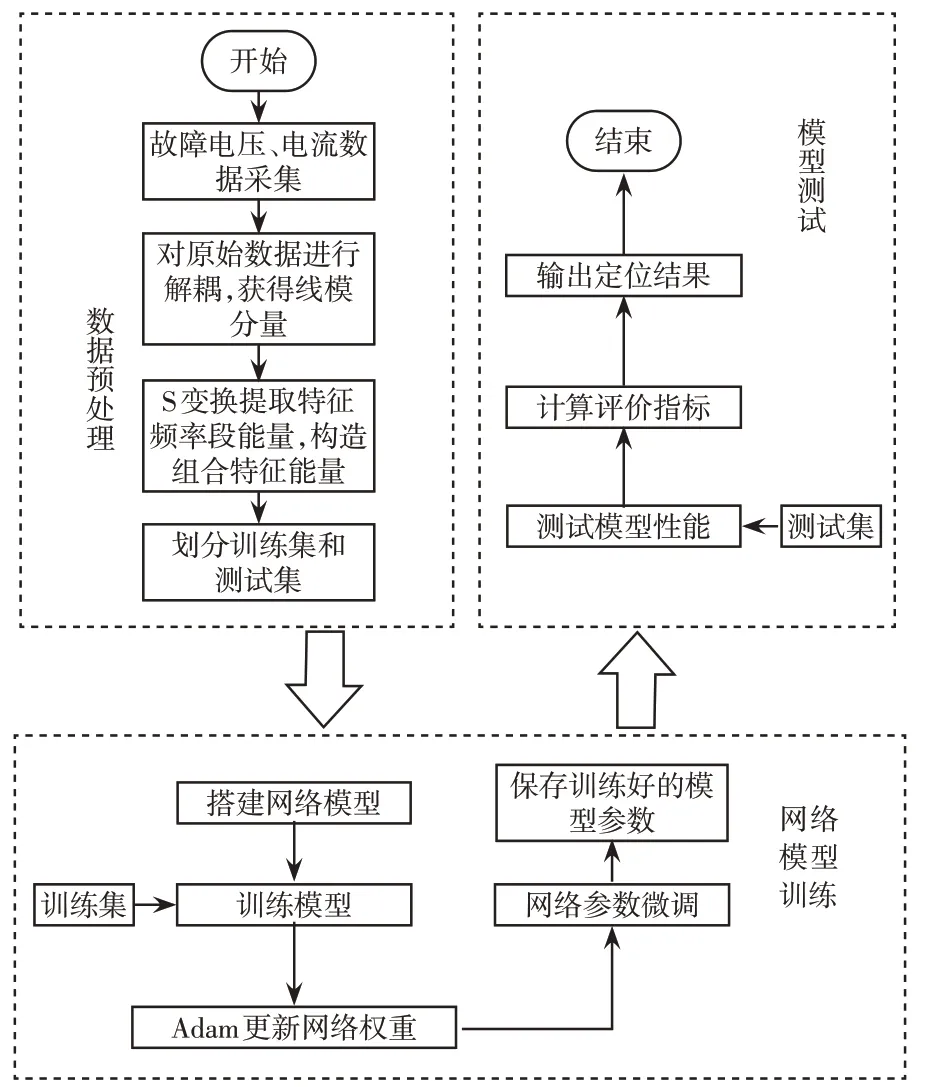
图11 1D-CNN-GRU 的故障定位流程Fig.11 Flow chart of 1D-CNN-GRU fault location
步骤1采集HVDC 输电线路故障电压、故障电流原始数据。
步骤2利用凯伦贝尔极模变换对故障数据进行解耦,得到线模电压和线模电流。
步骤3对线模电压和线模电流分别进行S变换,求得特征频率范围能量分布,对其进行数据归一化处理,再将二者组合形成组合特征。
步骤4 根据步骤1~3构建实验数据集并划分出训练集与测试集,其中将数据集的10%随机划分为测试集,数据集的90%随机划分为训练集,将训练集输入模型对模型进行训练。
步骤5利用训练集对1D-CNN-GRU模型进行训练,训练中利用Adam优化器更新网络权重,加快网络的收敛速度。
步骤6根据训练集与测试集的共同表现调整模型的epochs、batchsize及学习率等参数,最后保存训练好的模型结构及权重参数。
步骤7利用测试集测试已训练好的模型,计算评价指标,输出定位结果。
4.2 评价指标
均方误差MSE(mean squared error)用来衡量模型输出值与目标值之间的偏差的指标,MSE越小说明模型预测精度越高。本文采用MSE 作为混合神经网络的损失函数。决定系数R2用来判断模型的拟合能力,其中R2∈[0 ,1] ,若R2=1 则表示模型预测的输出值与目标值完全相同,模型拟合效果最佳。本文采用R2作为网络的评价函数。平均误差可以反映模型预测的输出值与真实值之间的平均偏差,用来评价本文所提故障定位模型的精度。3种评价指标的数学表达式分别为
式中:eMSE为均方误差;eME为平均误差;n为样本个数;yi为真实故障距离;为预测的故障距离;为y的平均值。
5 仿真验证
5.1 1D-CNN-GRU 模型收敛性验证
根据图1 所示的输电线路仿真模型在PSCAD平台上进行仿真分析。设采样频率为100 kHz,线路长度为500 km,故障类型设置为正极故障、负极故障和双极故障3 种。为使样本包含的故障距离信息更准确,以距离整流侧1 km处为起始,到距离首端490 km处结束,步长为1 km,过渡电阻分别设置为10 Ω、50 Ω、100 Ω、150 Ω,则实验数据集共有组样本数据。
本文在对1D-CNN-GRU模型进行训练时,将实验数据集按照9∶1 的比例分为训练集和测试集。通过查看训练集与测试集的损失值随着epoch的变化关系可以看出模型是否过拟合,若模型发生过拟合则及时停止训练,然后根据情况调整网络结构模型和超参数。本文将epochs 设置为60,batchsize 设置为32,学习率设置为10-3。训练所得模型的Loss曲线如图12 所示。对图12 进行分析可知,模型训练到第10 轮时Loss 曲线就开始趋于收敛,训练到第60 轮时Loss 曲线已完全收敛,损失值趋于1×10-4。可见,本文所提模型具有较好的收敛性且收敛速度较快。

图12 Loss 曲线Fig.12 Loss curves
5.2 故障定位结果分析
本文所提模型经过训练后得到的表征拟合程度的指标R2为99.9%,测试集的平均误差eME为0.024%。故障定位回归曲线如图13所示。这里将模型输入值与输出值归一化到0 和1 之间,用来表示线路故障位置与线路总长度的占比。图13 中,以直线y=x为对称轴,偏离该轴的距离就是故障定位误差,偏离程度越小,故障定位精度越高,定位模型的回归拟合能力越高。从图13 可以看出,输出定位结果与真实故障距离之间几乎完全重合,说明本文所提故障定位模型的拟合能力较强,故障定位精度较高。
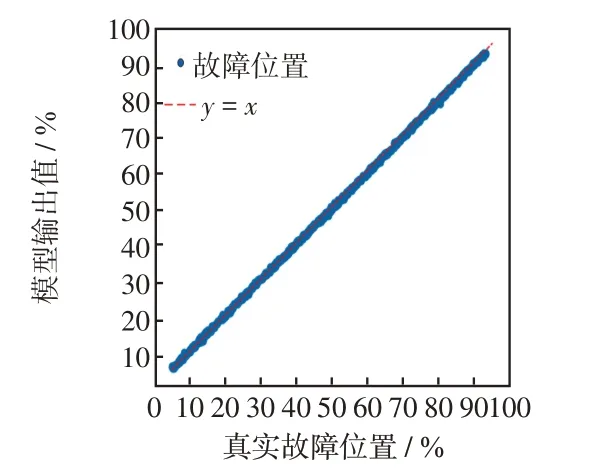
图13 故障定位回归曲线Fig.13 Fault location regression curve
构造测试样本数据如下:故障位置分别位于线路全长的10%、40%、80%、90%处,故障类型分别为PGF、NGF 和BPF,过渡电阻分别为20 Ω、40 Ω、60 Ω、80 Ω、90 Ω、110 Ω、130 Ω、160 Ω,这样每个故障位置均有24 种故障情况(不同故障类型对应不同过渡电阻)。故测试集共有4×3×8=96 组故障样本数据。将测试样本集输入训练好的故障定位模型中进行测试,得到平均误差eME为0.011%。定位结果如表1所示。
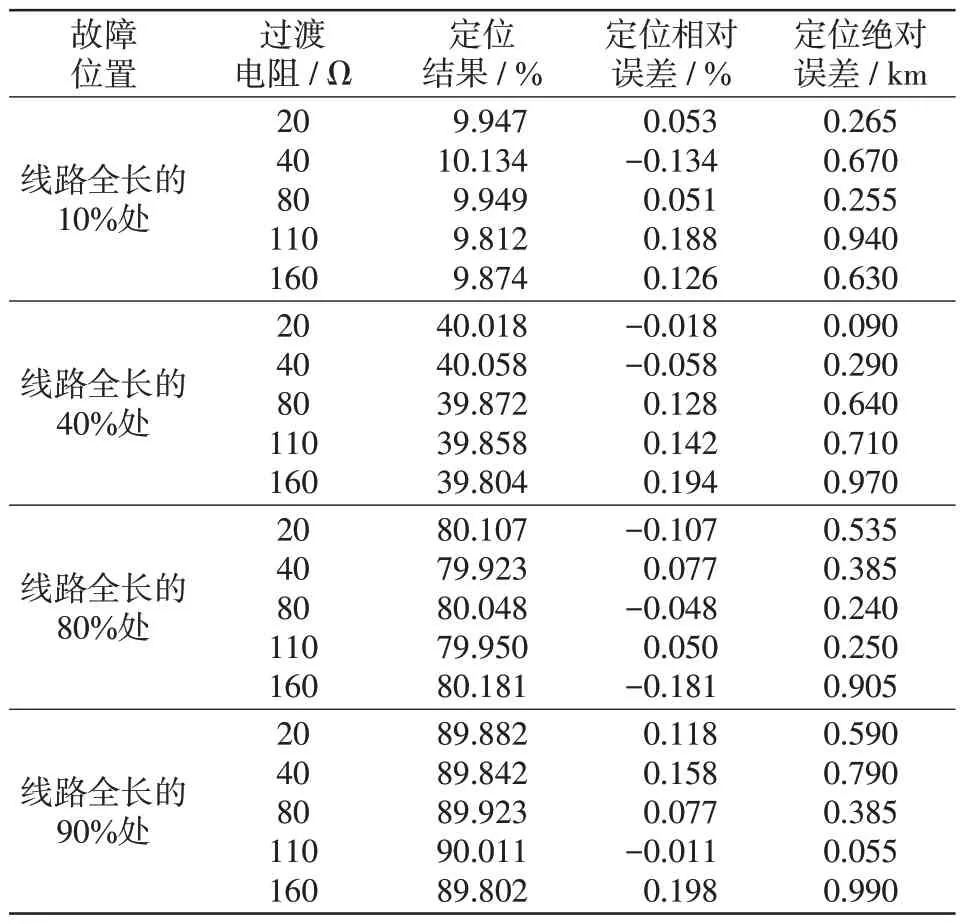
表1 定位结果Tab.1 Location results
5.3 性能分析
5.3.1 不同定位模型抗噪性能分析
将本文所提模型与SVR、ELM、RNN和1D-CNN模型进行对比。采用相同的数据集对各个网络模型进行训练和测试。考虑到输电线路故障检测的实际情况,例如设备设计参数和电力系统运行状况等的影响,系统都会受到不同程度的干扰进而导致实际定位存在误差。因此,为了更好地模拟实际情况,在测试样本原始数据中加入信噪比SNR(signalto-noise ratio)为20~50 dB 的高斯白噪声来模拟实际情况下的噪声干扰情况。不同模型在有无噪声干扰下情况下的定位结果对比如表2 所示。不同模型的定位误差对比如图14所示。

表2 不同网络模型在有无噪声干扰下的定位结果对比Tab.2 Comparison of localization result among different network models with or without noise interference
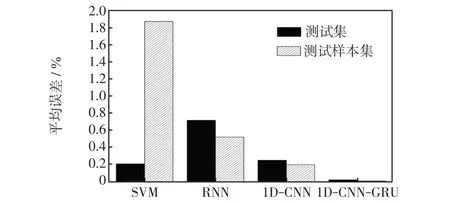
图14 不同模型的定位误差对比Fig.14 Comparison of location error among different models
由表2 与图14 分析可知,在4 种故障定位模型中,本文所提模型的定位精度最高,SVM 模型的定位精度最差;在测试样本集中加入不同信噪比的噪声干扰后,各模型均有一定的抗噪能力,但本文所提模型的抗噪能力最强,当SNR达到30 dB时,平均误差为0.021%,即绝对误差为0.105 km,仍能实现精确故障定位。
5.3.2 耐过渡电阻性能分析
从图6 可以看出,组合特征的能量分布会受到过渡电阻的影响,故过渡电阻对故障定位精度会有一定的影响。为了验证本文所提故障定位模型的耐过渡电阻的能力,这里进行高阻故障测试。随机设置8种故障距离,每种故障距离下测试10种不同的过渡电阻(即过渡电阻范围为150~600 Ω,步长为50 Ω)情况下的故障数据,故共有8×10=80 组故障样本数据,得到测试定位结果如表3 所示,其中误差均值表示每种故障距离对应10 种不同过渡电阻所得到的定位结果的误差平均值,最大误差则表示同一故障距离下这10 种不同过渡电阻得到的定位结果中的最大误差。
由表3 可知,在高阻故障下,本文所提模型依然具有较高的定位精度,最大定位误差不超过0.2%,即误差距离不超过1 km。因此,本文所提故障定位模型具有一定的耐过渡电阻能力。
5.3.3 与其他故障定位模型的对比
将本文所提故障定位模型与传统智能故障定位模型对比,结果如表4 所示,其中“―”表示没有进行该项实验。
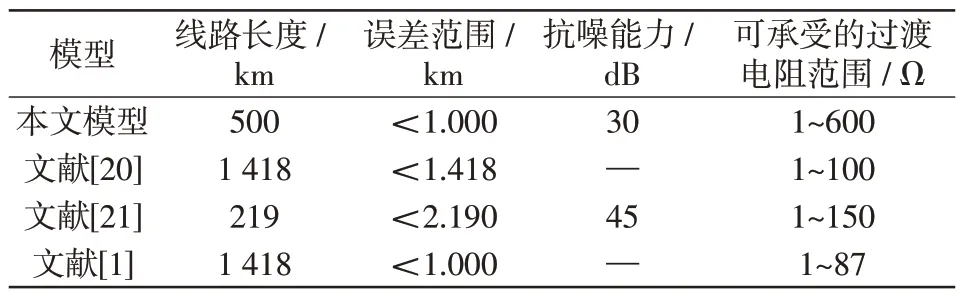
表4 智能故障定位方法对比Tab.4 Comparison among intelligent fault location methods
在表4 中,文献[20]提出的基于小波包能量比与利用多种群遗传算法MPGA(multiple population genetic algorithm)优化Elman 神经网络的故障定位方法适用于长线路的故障定位,但抗干噪声扰能力还未进行验证;文献[21]提出的基于S 变换和PSOGRNN 的故障定位方法适用于短距离输电;基于改进果蝇算法RBF(radial basis function)神经网络故障测距方法[1]适用于长距离输电,定位精度较好,但过渡电阻与噪声对测距精度的影响较大。
由表4 可知,相比于上述文献所提模型,本文所提模型定位精度较高,误差范围在1 km 以内,抗噪声干扰的能力可达到30 dB,耐受过渡电阻可达到600 Ω,结果表明,本文所提模型能够适用于远距离输电线路的故障定位,具有较强的抗干扰能力且定位精度较高,误差范围在1 km以内满足HVDC输电线路故障定位要求。
6 结 语
针对HVDC 输电线路智能故障定位研究中存在的智能定位模型泛化性能不足及鲁棒性不高导致的定位精度低的问题,本文提出一种基于S变换组合特征能量与1D-CNN-GRU 的混合神经网络故障定位模型。在考虑不同故障类型、不同故障位置及不同过渡电阻的情况下,所提模型收敛速度快、非线性拟合能力强、定位精度高。与传统智能故障定位方法中采用的浅层神经网络相比,本文所提故障定位方法具有更好的鲁棒性,对噪声干扰及过渡电阻的耐受能力更强,在高阻故障的影响下仍能准确实现故障定位。
猜你喜欢
军事文摘(2023年4期)2023-04-05
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·中考版(2020年10期)2020-11-27
电子制作(2019年11期)2019-07-04
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
中学生数理化·中考版(2018年11期)2019-01-31
测控技术(2018年4期)2018-11-25
北京航空航天大学学报(2018年1期)2018-04-20
制造技术与机床(2017年3期)2017-06-23