矿用救援探测机器人系统设计与研究
2023-09-27 15:07薛春荣李小波
煤炭工程 2023年9期
薛春荣,李小波
(1.煤矿瓦斯灾害预警与防控国家矿山安全监察局重点实验室,重庆 400037;2.中煤科工集团重庆研究院有限公司,重庆 400037)
矿井火灾、瓦斯爆炸事故后,灾区现场温度高,粉尘浓度大,巷道内充满爆炸性气体以及高浓度CO等有毒有害气体,矿井环境不稳定,随时有可能发生二次爆炸,救护人员不能贸然进入灾区。因此,亟需一种能够代替救援人员进入到受灾区域进行实时探测,为救援人员、救援指挥人员进行决策和精准施救提供现场有效数据[1-4]。目前,国内外煤矿救灾机器人的研究取得了丰硕的成果,出现了各种不同形式的救灾机器人及其相关技术[5-9],但现有无线通信救灾机器人需要救援人员在近距离可视范围内进行遥控操作,无法实现真正意义上的远程操控,因为煤矿井下的无线通信信号在巷道内传播特性不同于地面,在煤矿井下特殊空间及多变工作环境下无法满足高吞吐速率、远距离可靠稳定传输等需求[9-12],尤其是随着救灾机器人的行走距离增加,无线信号强度变弱及干扰增多,就会造成遥控信息的缺失,使得救援人员不能对受灾区域进行实时、全面的探测[13,14]。
其次,由于灾后地面环境极其复杂,多为非结构路面,往往存在很多细石瓦砾、障碍物,对矿用探测机器人行走机构的要求非常苛刻。但履带行走装置具有驱动力大、接地比压小、底盘稳定性好、爬坡能力强、转弯半径小以及对各类底板适应能力强等优势[15,16],因此,本文设计一种越障能力强、远距离通信可靠的救援探测机器人系统,可在灾区探测作业,能有效地保护救援人员,提高救援效率。
1 救援探测机器人系统设计
1.1 救援探测机器人系统组成
救援探测机器人系统组成如图1所示,该系统由遥控器服务器、救援探测机器人组成。救援探测机器人由遥控服务器遥控,可实现各类有毒有害气体浓度,及清晰图像信息采集,可辅助或代替救援人员对煤矿事故危险现场环境进行探测。

图1 矿用探测机器人系统
1.2 救援探测机器人设计
救援探测机器人是负责救援事故现场的环境参数、现场状况的探测,主要是由履带移动平台、自动收放线装置、升降式环境信息采集单元、视频采集单元等组成。
1)履带移动平台,由履带行走装置、防爆动力电源、驱动控制单元、防爆壳体等组成,履带式行走装置主要的组成部分为48 V/3 kW的直流伺服电机驱动装置、克里斯蒂悬挂履带行走机构。防爆动力电源,由17块100 Ah磷酸铁锂蓄电池组串联,额定电压48 V,为提高电池组的安全性,成组设计的单体电池并联二极管,支路输出端串联二极管、过流熔断电阻。同时电源配置电池管理系统(BMS),具有电池充放电策略管理、电池组温度实时检测、单体电池电压和电流检测、SOC估计等功能。驱动控制单元,采用GX48-150伺服驱动器与西门子PLCS7-200构成驱动控制单元,具有速度传感器矢量控制功能,可实现控制器对电机转矩的精确控制。
2)自动收放线装置,主要由直流电机+行星轮减速器与链轮固联带动绕线盘正反转动,实现线缆的收放。为了使线缆能规则舒展的卷绕在线盘上,设计链轮丝杠排线装置与电动导轨式的弹力张紧装置,排线装置的丝杠导程约为线缆的直径。卷线装置收放线时,电机带动绕线盘转动,电缆在随着机器人的移动自动收放,收放速度通过电动导轨式的弹力张紧装置的张紧力反馈自动控制收放线速度。
3)升降式环境信息采集装置,由电动推杆式升降装置和气体传感器组成。电动推杆式升降装置可升降高度为1.5 m,可有效的采集不同高度的气体浓度。包括二氧化硫、二氧化氮、硫化氢、一氧化碳、温度、烟雾传感器,数据通过485有线通信网络传输到遥控器服务器进行显示与报警,同时也具有本地显示,超限声光报警功能。
4)视频采集单元,包括3台可见光/红外摄像仪和1云台摄像仪,用于实时采集监控光缆卷线装置的工作状态、机器人行走的路况信息、事故救援现场图像等,其中,所有摄像仪通过网络TCP/IP协议传输。
1.3 遥控服务器设计与测试
遥控服务器主要包括硬件平台和软件系统。硬件系统主要由本安电源、主板、数据采集卡、显示屏、本安光电交换机等组成。软件系统采用力控组态软件(ForceControl)平台进行设计,其具有实时数据库、设备通讯服务程序、网络通讯程序、HMI画面、SDK接口、Web应用服务、数据存储和转发等功能模块,便于救援探测机器人遥控软件系统的设计开发。
遥控服务器通过3 km光缆(MGTBV(2~12)B铠装防爆光纤,直径8 mm)与救援探测机器人进行有线通信。实现遥控制指令传输、状态指示、数据显示、画面显示、数据存储等应用功能。首先,显示界面上能实时显示救援探测机器人采集的各种信息及数据,包括现场视频图像、温度数据、气体浓度数据和各种报警信息等。其次,救援探测机器人所有的视觉图像、音频等感知信息均在遥控服务器上进行分析处理。如救援探测机器人设备出现异常时,救援探测机器人和遥控服务器均会发出报警声音,提示救援队员。通过遥控服务器能够形成实时报警记录、历史报警记录并存入数据库中。
最后,通过对系统遥控通信质量进行测试,通信线缆收放正常,四路图像清晰连续,环境检测数据传输正常,系统整体通信信号稳定可靠,运行1小时数据平均延时小于37 ms,满足通信要求。
2 救援探测机器人的防爆设计
防爆设计是爆炸性环境作业机器人区别于其他行业机器人的本质特征,煤矿环境对防爆设计的要求最为严格。因此,救援探测机器人需满足《煤矿安全规程》和《爆炸性气体环境用电气设备》(GB/T3836—2021)的防爆要求[17]。
2.1 救援探测机器人本安设计
救援探测机器人本安设计主要就是本安部件的本安供电及相关本安信号的隔离设计。主要包括本安摄像仪、云台摄像仪、气体传感器、温湿度传感器、声光报警器等。本安摄像仪/云台摄像仪视频数据信号,采用万维的IT-NET本安信号隔离转换模块隔离,气体传感器、温湿度传感器、声光报警器等485本安信号采用万维的IT-COM信号隔离转换模块隔离。本安部件供电模块选择与无锡煤科本安参数(电容、电感、电压)相匹配的本安电源模块,且放置于隔爆腔中。
2.2 壳体隔爆设计
隔爆壳体应能够承受通过外壳任何接合面或结构间隙渗透到外壳内部的可燃气体混合物在内部爆炸而不损坏,并且不会引起外部的爆炸性环境的点燃。救援探测机器人履带移动平台、升降式环境信息采集装置、自动收放线装置均采用隔爆设计,隔爆结合面主要采用圆筒隔爆面和平面隔爆面。

图2 履带驱动轮隔爆结构示意
本研究以复杂的驱动轮隔爆设计为例,在壳体侧壁高为40 mm凸缘加工安装阶梯套的安装孔和法兰面,保证螺纹孔不穿透壳体。阶梯套与壳体安装孔过盈配合,与驱动轴间隙配合,阶梯套内圆柱面与驱动轴形成圆筒隔爆接合面,隔爆面长19.5 mm,间隙0.04 mm。阶梯套采用无火花的合金铜材料制作,驱动轴与阶梯套采用旋转密封圈(铜合金)。阶梯套与外壳法兰采用平面隔爆面,隔爆面长23 mm,间隙0.4 mm。移动平台的隔爆外壳材质为Q345钢板焊接而成,有三个隔爆腔组成,其中电机腔能承受1 MPa,电池腔能承受1.5 MPa,接线腔能承受1.5 MPa,加压时间为(10+20)s 的静压试验。
3 救援探测机器人越障分析
救援探测机器人应具备较强的爬坡越障能力,以适应煤矿非结构环境,而影响其爬坡越障性能的重要因素之一是机器人的重心位置分布,因此需要对其分析设计[18]。
3.1 救援探测机器人越障运动分析
救援探测机器人从动轮履带首先接触到台阶尖角,在驱动轮的推动与支撑轮的支持力、摩擦力的共同作用下慢慢爬上台阶,前轮(从动轮)位置随之升高,救援探测机器人从接触台阶障碍物到完全越过的过程如图3所示。

图3 救援探测机器人越障过程示意
救援探测机器人越障时,主要应该考虑其机体重心是否可以适应障碍物[19,20],及越障时输出转矩受其机体仰角变化规律,建立其受力分析模型(如图4)。
式中,Ff1,Ff2为探测机器人受到地面摩擦力,N;FN1,FN2为探测机器人受到地面的支撑力,N;G为探测机器人结构重力,N;T为探测机器人输出转矩,N·m;μ为摩擦系数,取μ=0.5[21];L为引导轮与驱动轮中心距,m;β为探测机器人仰角,逆时针旋转为正,(°);R为探测机器人驱动轮半径,m。
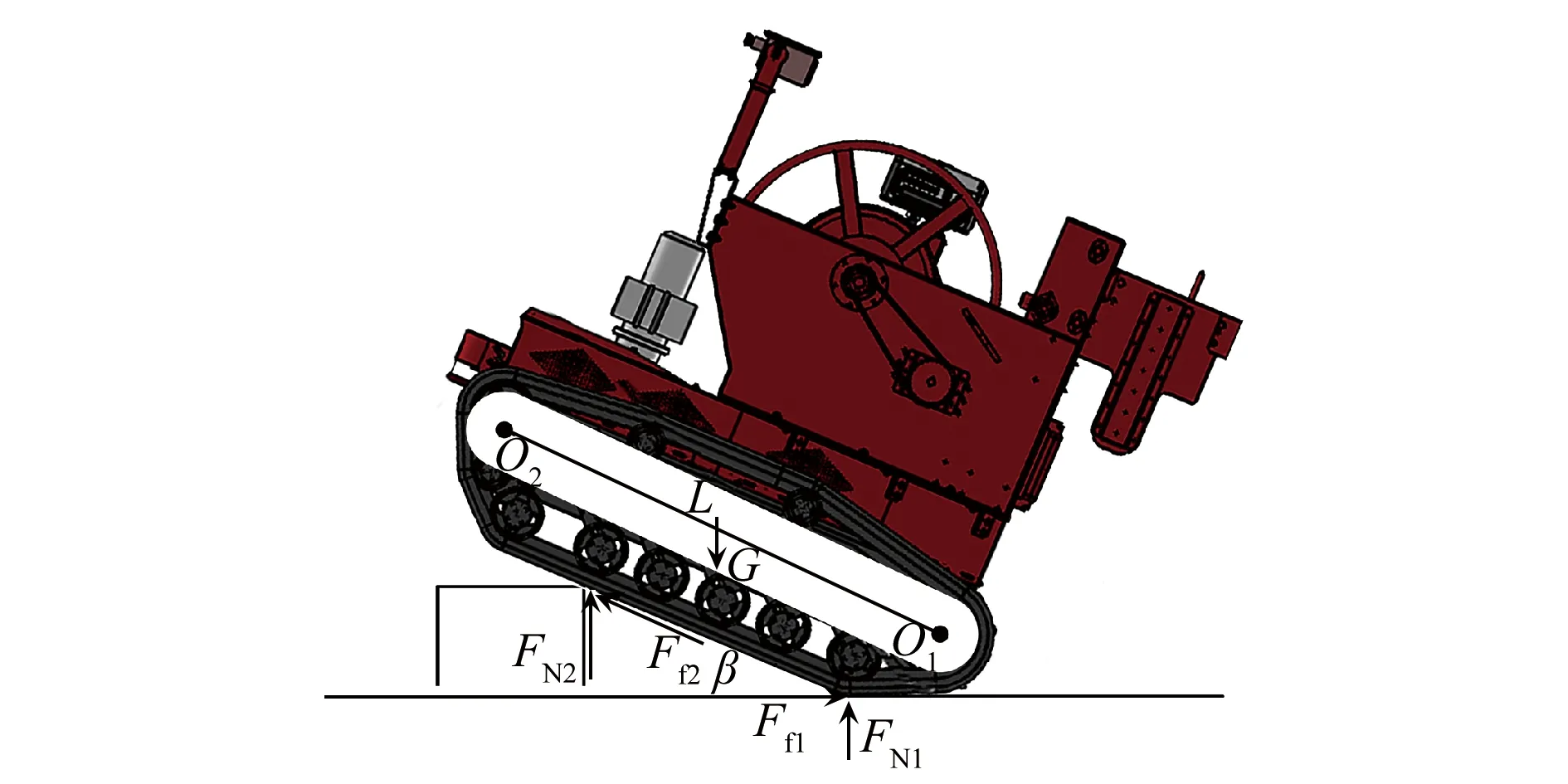
图4 救援探测机器人受力情况
整理式上式可得救援探测机器人电机输出转矩与车体仰角β的函数关系:
T=(Ff2sinβ+FN2)Lcosβ-G(Lxcosβ-
Lysinβ)-Ff2cosβLsinβ
式中,(Lx,Ly)为机身的重心位置。
绘制救援探测机器人电机驱动转矩随车体仰角β变化曲线如图5所示,探测机器人驱动转矩受仰角影响,即仰角越大,其所需驱动转矩越大。
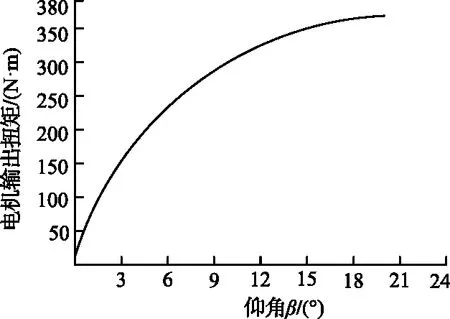
图5 电机驱动转矩随救援探测机器人仰角变化曲线
由于重心(质心)难以测量,因此采用实验进行测定。其中探测机器人处于仰角β=23°时,取得最大转矩值,Tmax=367 N·m 。通过分析,3 kW驱动电机+ZPLE120行星齿轮减速机最大输出力矩达380 Nm,能够满足越障需求。
3.2 救援探测机器人越障实验
根据设计分析,对救援探测机器人越台阶障碍时两侧驱动电机力矩变化进行分析。选取高度为22 cm的水泥台阶进行越障实验,初始路面为水泥硬化路面,完成路面为草坪,越障性能测试如图6所示。在实际越障过程中,采集驱动电机电流,通过力矩与电流的数学关系计算驱动电机输出力矩,并绘制曲线如图7所示。

图6 越障性能测试

注:a表示准备爬台阶,仰角β=0增大;b表示在爬升台阶,仰角β增大;c表示在台阶上方,仰角β减小;d表示完成台阶爬越 仰角β=0增大
由图7可知:2个驱动电机的变化趋势是基本相同。通过对a阶段分析,由于在测试过程中驱动电机1侧的履带最先接触台阶,导致救援探测机器人向受力小的一侧偏转,表现为驱动电机2的力矩在时间上有一定滞后性,在b阶段越障过程中力矩逐渐增大,当重心越过台阶的支点后,救援探测机器人的车头就急剧下落,电机的力矩也急剧变小(如c阶段),最后完成越障,平稳地在草坪上行走,此时的力矩比初始在水泥路面大。
实验测试结果表明,救援探测机器人能顺利爬越22 cm高的阶障碍物,越障时电机的力矩与理论分析基本一致。
4 结 论
1)针对煤矿救援探测机器人在受限空间救援探测过程中,通信不稳定性、以及非结构环境的越障性能问题。研制了具有自动跟随收放通信光缆功能的履带式救援探测机器人及遥控服务系统。具体分析了救援探测机器人越障过程中力矩与仰角的关系,并进行实验测试,实验表明越障过程中仰角越大,需要的电机驱动力矩越大。
2)对救援探测机器人系统进行了测试,救援探测机器人可顺利通过22 cm高的台阶,3 km通信光缆收放正常,运行1 h数据平均延时小于37 ms,四路图像清晰,环境检测输数据传输正常,系统整体运行稳定。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
初中生世界·九年级(2020年2期)2020-04-10
语文世界(小学版)(2019年2期)2019-02-24
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
科技视界(2016年15期)2016-06-30
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
小天使·一年级语数英综合(2014年7期)2014-06-26
环球时报(2012-03-28)2012-03-28