
基于保障航行安全的海缆信息采集方法的研究与应用
2023-09-26 06:07季凯敏范明华
航海 2023年5期
季凯敏 范明华
(交通运输部东海航海保障中心上海海事测绘中心,上海 200090)
随着海上风电建设的加快发展,海底电缆管线的铺设越来越多,海上风电场建设过程中可能产生实际影响船舶作业安全的障碍物,这些因素给水上交通安全带来较大的潜在安全隐患。航行和作业船舶因不了解海底海缆情况,水上交通意外事故时有发生,同时锚泊船舶造成海底电缆损伤,给海上风电绿色能源建设也造成了不可估量的损失。
为了保障船舶通航安全,有必要在海缆敷设完成后,对海缆路由情况及相关水域的水深变化等信息进行全面采集,摸清施工后的周围水深情况、海底地形现状,查明断管、残管等影响通航安全的障碍物,更新港口航道图资料,确保各类通航和作业安全风险受控。同时,为港口规划建设及港航服务提供依据,为海底电缆维护提供技术支持。
1 采集方法研究
1.1 采集内容
为了保障船舶通航安全,需要对海缆电缆铺设后的水域情况进行信息采集。从信息采集的目的出发,可以将采集的内容分为水深测量、障碍物探测、海缆路由探测3 个主要部分,如图1 所示。
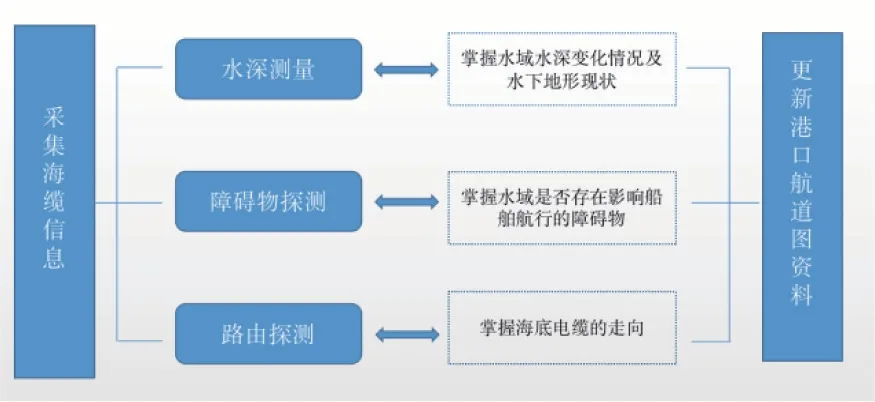
图1 海缆信息采集内容
1.2 采集方法
海底电缆管道路由勘察一般在沿路由中心线两侧一定宽度的走廊带范围内进行。宽度在登陆段一般为500 m,在近岸段一般为500 m,在浅海段一般为500~l 000 m。为了调查施工水域周围的水深变化情况,摸清影响通航安全的障碍物,水深测量和障碍物探测的范围宜选择500~l 000 m。
1.2.1 水深测量
水深测量的主要方法为单波束测深系统和多波束测深系统。本文建议结合水域港口航道图资料,可采用单波束测量的方式进行水深数据的采集。在需要采集信息的水域范围内,测线垂直于海底管线方向布设,如图2 所示。岸侧测至等深线2 m 处为宜。
1.2.2 障碍物探测
探测航行障碍物的基本要求是准确测定其位置、最浅深度(或干出高度或高程)、延伸范围和性质。大面积海区障碍物探测通常是将多波束测深系统与侧扫声呐扫测系统进行有机结合,在侧扫声呐系统对水域进行粗扫的基础上,采用多波束测深系统对侧扫声呐系统发现的障碍物的概略位置、高度进行精扫。
采用侧扫声呐系统对测区进行全覆盖测量,测线平行于路由方向,其中一条测线应沿路由布置。
1.2.3 海缆路由探测
海缆路由探测常用的手段为磁力仪或者浅地层剖面仪。磁力仪通常以拖曳方式,由于受潮流、风浪等因素的影响,位置归算会存在一定误差,可采用同一测线往返取平均的方式减小位置归算误差的影响。
相比拖曳式的磁力仪,浅地层剖面可固定安装于船舷,定位精度相对较高,如图3 所示。如SES-2000 Light 型参量阵浅地层剖面仪,其换能器小巧轻便,安装快捷,同时具有很高的分辨率(100 KHz 换能器束角仅为1.8°),适合于浅地层及海底电缆等目标的精确探测。
本文建议一般情况下可使用浅地层剖面仪进行海缆路由探测的主要手段,将磁力仪作为补充手段,如部分水域的海底底质浅剖无法穿透。同时,为了探明特殊路段的海缆信息,如裸露段、拐弯段、海上升压站附近等,可借助ROV 水下机器人或者水下三维声呐系统,水下三维声呐系统组成如图4所示。
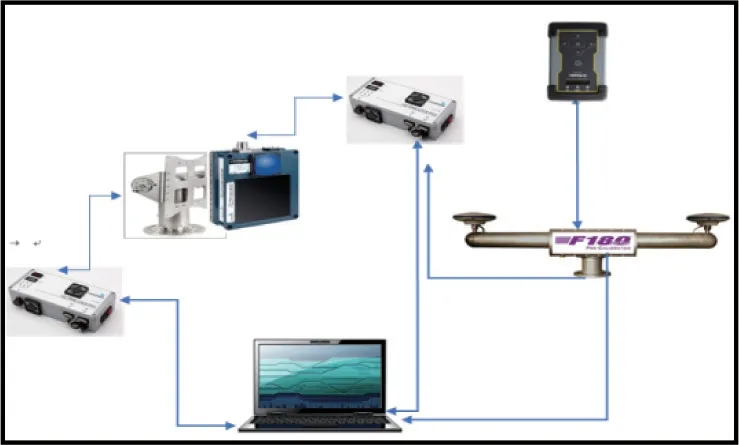
图4 水下三维声呐系统组成示意图
如EchoScope 三维成像声呐系统可以实时读取水下目标数据,形成清晰的三维图像,展现水下结构和目标物的细部构造,准确获取物体上每个点的三维坐标信息。选取EchoScope 三维成像声呐系统复核路由拐点附近的浅剖数据,确认路由拐弯段是否存在裸露。同时,探测出升压站及周边海缆的水下三维状况,确定升压站的准确位置。
综合以上内容和方法的研究探讨,总结形成以保障船舶通航安全为目的的海缆信息采集方法,如图5 所示。
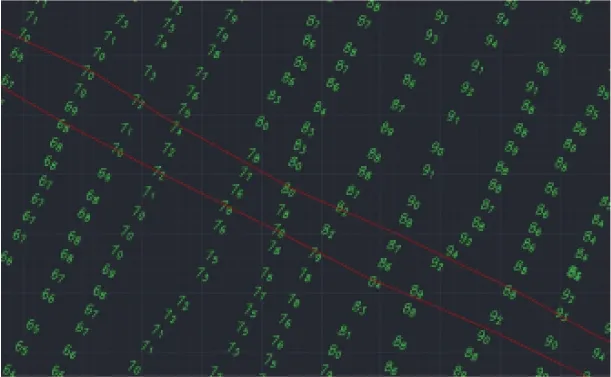
图6 局部水深情况示意图
2 海缆信息采集方法的应用
基于船舶通航安全,在苏北某海缆信息数据采集案例中,采用上述方法对海缆信息进行了采集。
2.1 水深数据
水深测量采用ODOM 公司的MKIII 型双频测深仪,采集高频水深数据,频率为200 KHz。水深测量比例尺1:5 000,路由两侧各500 m,岸侧测至等深线2 m 处重点关注路由附近水域水深变化情况,以及浅点分布情况。经综合分析,路由附近水深无明显变化,测量范围内未发现明显浅点。
2.2 障碍物探测
在障碍物探测过程中共使用蓝创Shark-S455 和EdgeTech-Discover-4205 两套声呐进行全覆盖扫测。
障碍物探测范围以路由中心线为基准两侧各500 m。测线平行于路由中心线布设,在路由上方及左右50 m 处布设3 条测线精扫,其余范围按照100 m 测线间距扫测。
在现场探测和数据回放过程中,探测到部分裸露路由段,如图7 所示。未在该水域发现影响船舶航行的碍航物。
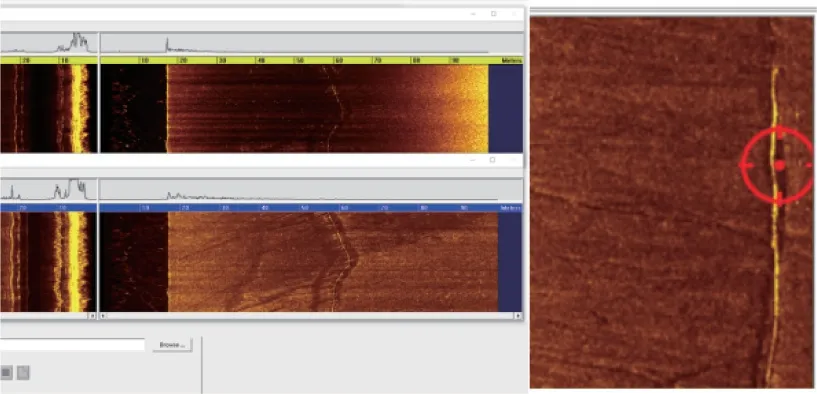
图7 裸露海缆管线
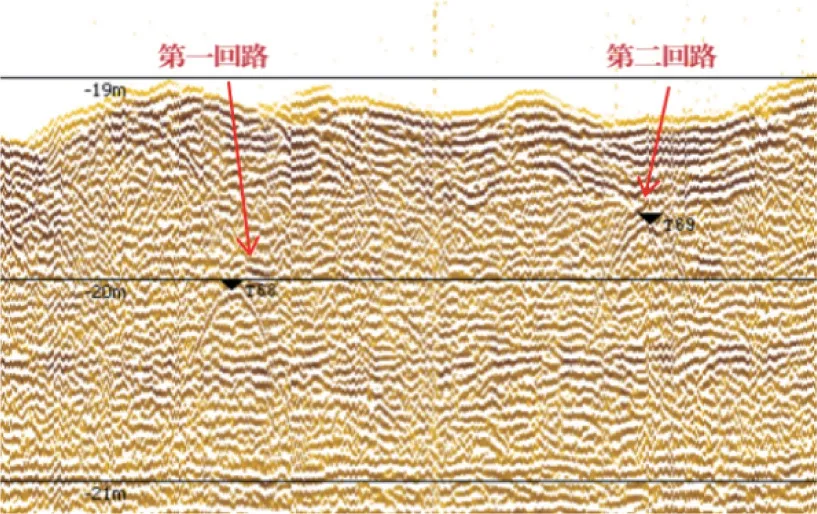
图8 海缆管线探测信号示意图
2.3 海缆路由探测
海缆路由探测主体部分采用浅地层剖面仪进行,部分水域以三维声呐辅助浅地层剖面仪进行探测。
2.3.1 浅地层剖面仪
浅地层剖面仪探测范围以海缆路由为中线,两侧各延伸250 m。海缆探测采用断面调查的方式进行作业,测量断面垂直路由走向,间距100 m,拐点处加密至20 m 间距。
2.3.2 水下三维声呐
利用水下三维声呐对海缆路由拐弯段以及升压站附近的海缆进行辅助探测。通过对外业数据进行处理,去噪、拼接后,分析发现,拐弯段无裸露海缆。将三维声呐探测到的路由信息通过AutoCAD 成图软件将管沟位置输出成图,与浅地层剖面仪探测的数据进行比对,确认三维声呐管沟位置与浅剖探测位置一致。如图9 所示,图中红色点位为浅剖探测数据,白色定位为三维声呐探测数据。

图9 拐弯段回路路由三维声呐数据和浅剖数据比对图
同时,利用三维声呐获得了升压站附近海缆路由走向以及升压站的位置信息,为更新海图提供完整的基础数据。
3 结束语
利用本文研究的海缆信息采集方法,基于船舶航行安全对海缆路由情况及相关水域的水深变化等信息进行全面采集,可以为更新港口航道图资料提供基础数据,确保各类通航和作业安全风险受控。
但是,风电场海缆情况和海底底质情况都比较复杂,在实际采集信息的过程过程中会采用多种手段辅助。
1)对于一些底质,浅地层剖面仪可能无法穿透或者信号强度不够,须采用磁力仪辅助探测。
2)合成孔径声呐(SAS)具有很高的方位向空间分辨能力,30 kHz 甚至更低频段的SAS,具有很好的掩埋物探测能力。搭载侧扫声呐和多波束的三维合成孔径声呐系统,可以对海底悬浮、沉底和掩埋目标进行三维成像探测。但是数据融合处理的效率偏低。
3)对于一些特殊需要,可利用水下机器人ROV 开展辅助探测。
对于通航环境复杂的水域,为了保障通航安全,海缆路由信息的采集要求可适当提高,如对一定范围内的水域进行多波束、侧扫声呐全覆盖测量等等。
猜你喜欢
河北水利(2022年10期)2022-12-29
海洋通报(2022年4期)2022-10-10
浙江电力(2022年8期)2022-09-01
电瓷避雷器(2022年2期)2022-04-27
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
电线电缆(2018年1期)2018-03-16
浙江国土资源(2015年4期)2015-05-09
声学技术(2014年1期)2014-06-21
机械制造与自动化(2014年1期)2014-03-01
