振荡射流控制方法在无舵面飞行控制中的应用
2023-09-25 00:46仇梓豪李子焱周楷文王士奇刘应征温新
实验流体力学 2023年4期
仇梓豪,李子焱,周楷文,王士奇,刘应征,温新,*
1.上海交通大学 机械与动力工程学院,上海 200240
2.中国空气动力研究与发展中心 低速空气动力研究所,绵阳 621000
3.中国船舶科学研究中心 水动力学科研部,无锡 214082
4.中国航空发动机集团 中国航空发动机研究院,北京 101304
0 引 言
舵面是安装在飞机或导弹的机翼、尾翼等部位的可动翼面,如副翼、升降舵、方向舵等。传统飞行器控制部件可通过移动、偏转舵面改变飞行器的局部几何特征,操控飞行器上的力和力矩,控制飞行器的航向和姿态。随着航空技术的蓬勃发展,机构繁复的传统飞行控制方法已无法满足现实需求,如移动部件会破坏特殊用途飞机精心设计的隐形气动外形,分翼面设计会破坏光滑连续表面等问题逐渐显现,研究者希望能够在不使用传统舵面的情况下操纵飞机,找到替代方法解决上述问题[1]。
2010 年,BAE 系统公司与英国多所高校合作,成功试飞了一款名为“DEMON”的无人机,用以验证航空领域的一些先进技术[2],其中就包括2 项颇受关注的无舵面飞行控制技术—环量控制(circulation control)技术和流体推力矢量(fluidic thrust vectoring)技术。2019 年,BAE 系统公司与曼彻斯特大学合作,设计制造了名为“MAGMA”的飞翼布局无人验证机,旨在探索新型无舵面飞行控制技术在未来无尾飞机上的应用。MAGMA 没有采用DEMON 的单独供气方案,而是采用了更贴近实际的发动机供气方案,并且将尾缘的康达射流提升至超声速[3],其成功试飞使环量控制和流体推力矢量技术在未来高性能飞机中的应用成为可能。本文就将对这2 项无舵面飞行控制技术进行介绍。
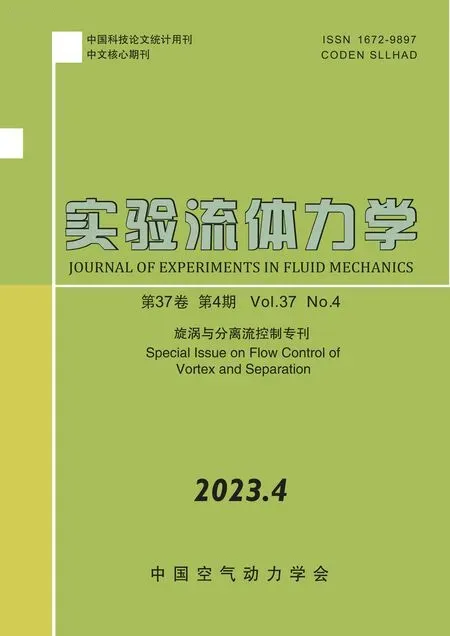
传统的舵面飞行控制通过机械方法制造气流偏转,利用反作用力或力矩控制飞行器。从20 世纪70 年代开始,美国学者利用康达效应(Coandă effect)[4-5]气动控制方法[6-8],开展了一系列关于环量控制的研究。环量控制是一种基于气动的主动流动控制方法,相比传统的舵面设计,环量控制能够显著提升翼型的最大升力。如图1 所示,环量控制翼型取消了传统的襟翼设计,将机翼尾缘设计为圆形钝体,在康达壁面与普通翼面的衔接处通常留有一个狭缝,用以制造沿康达壁面切向的狭缝射流[8]。射流在康达效应作用下依附于尾缘壁面上直至分离点,翼型的前后驻点在气动力影响下向下移动,并在机翼周围生成巨大的环量,从而增强了机翼上的升力。据报道[9-10],环量控制翼型的最大升力系数可达到9 左右,而采用复杂的机械式增升装置仅能达到6。环量控制技术的卓越性能使之在短距起降、无舵面控制等应用方向上有着较大的潜力,引起了国内外研究者的广泛关注。南京航空航天大学史志伟教授团队[11]将环量控制技术应用于小型无人机进行飞行验证实验,发现环量控制技术产生的最大滚转舵效率相当于副翼偏转50°、最大俯仰舵效率相当于传统俯仰舵在10 m/s 的速度下偏转10°,证明了环量控制致动器取代传统舵面的可行性。国防科技大学罗振兵教授团队[12]首次将双合成射流致动器集成进无人机,用于无舵滚转姿态控制,发现基于双合成射流致动器的环量控制配合两翼的差动控制可达到最佳控制效果,最大横滚角速度为15.62 (°)/s。此外,还有关于超临界翼型的双射流环量控制研究[13]、环量控制机翼增升及滚转控制特性研究[14]、环量控制翼型非定常气动力建模[15]、脉冲射流对环量控制翼型气动性能的影响[16]等相关研究成果。
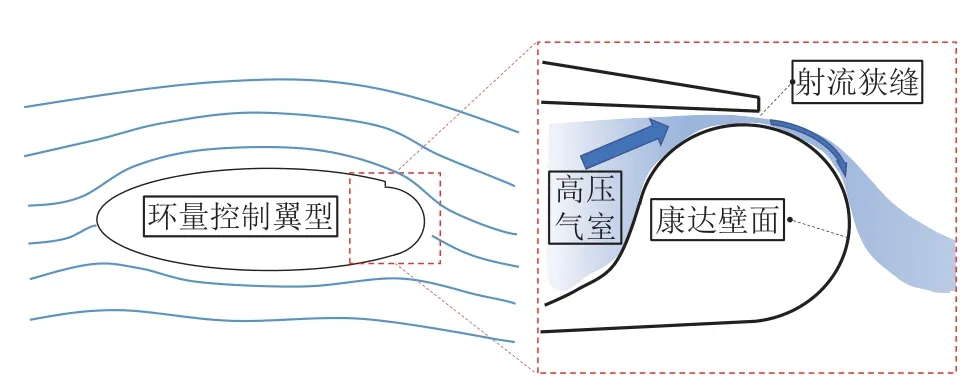
图1 环量控制翼型示意图Fig.1 Schematic of a wing using circulation control
传统的推力矢量技术利用机械致动,通过改变喷管几何外形的方式改变发动机主射流方向,以此改变推力方向,从而实现飞行器的快速变向、短距起降等机动。在Lockheed YF-22[17]等机型中可以看到这种技术的应用。推力矢量技术带来的高机动性、强隐身性等特点,使其在高性能飞机设计领域中有着较大的应用潜力[18]。
机械推力矢量技术存在附加重量大、机构复杂度高、造价高昂等诸多问题,限制了这一技术的推广与应用,流体推力矢量技术作为一种替代方案被提出。与传统的机械推力矢量技术相比,流体推力矢量技术省去了复杂的机械致动部件,通过流体间的相互作用,驱动矢量偏转或实现喉道调节,大大简化了结构。根据肖中云[18]、Deere[19]及Flamm[20]等的研究,具有代表性的流体推力矢量技术包括激波矢量控制方法[21]、喉道移动控制方法[22]、逆流控制方法[23]、双喉道控制方法[24]和同向二次流控制方法[25]等。其中,同向二次流控制方法受到较多关注,其控制效果及几何参数的影响规律已被研究者逐步了解[26-27]。同向二次流控制方法的原理如图2 所示,通过将二次流注入主射流与一侧壁面间的空隙,引发主射流与弯曲出口壁面之间的康达效应,从而实现主射流的偏转。由于二次流注入的方向与主射流的方向相同,因此这种方法的一个显著优点就是能够减少主射流的动量损失。除此之外,研究者还针对无源推力矢量喷管[28-30]、基于引射效应的流体推力矢量控制方法[31]及水下矢量喷管[30,32]等开展了研究。

图2 同向二次流控制方法原理示意图Fig.2 The schematic diagram of the principle of the co-directional secondary flow control method
以环量控制技术和流体推力矢量技术组合开发的无舵面飞行控制系统替代传统的舵面飞行控制系统[2-3],不仅可以降低机械装置带来的附加质量,还可以节约系统维护与采购成本,延长设备使用寿命。此外,无舵面飞行控制的性能也更加优异,环量控制技术拥有更高的增升效率,而流体推力矢量技术可以提高发动机推重比,适合高性能飞机的短距起降和快速机动。值得一提的是,使用无舵面飞行控制可以取消平尾、垂尾等舵面布局,消除了机体的运动部件、缝隙和不连续点,有利于飞机气动隐形设计[1]。
但是,耗气量始终是阻碍气动控制技术发展的重要因素。研究发现,由于环量控制技术的高压气源需求,发动机引气的推力损失达到了5%[33]。一种改善方式是使用非定常射流,与定常射流相比,脉冲射流环量控制仅需不到一半的质量流量即可达到相同的升力系数[34],使用脉冲射流阵列环量控制技术同样也可以降低耗气量[35]。此外,合成射流也被用于推力矢量控制研究,无需气源消耗,利用高频压电薄膜等方式实现非定常激励[18,36]。近年来,振荡射流非定常控制方法受到越来越多的关注,其无需任何机械运动部件,采用内部复杂通道激发射流不稳定性,在定常流量输入的情况下,产生非定常激励,具有工作稳定和激励强等优势。本文将以本课题组近年来的实验研究工作为主要内容,介绍振荡射流在环量控制和流体推力矢量等领域的研究进展。
1 基于振荡射流的流场调控方法
流体振荡器(fluidic oscillator)是一种不包含机械位移部件和电磁激励部件的器件,只需在其入口处通入恒定流量的流体,即可在出口产生连续稳定的横向振荡射流。按照反馈通道数量,流体振荡器大致可以分为3 类[37]:无反馈通道流体振荡器、声速振荡器和双反馈通道流体振荡器,其中双反馈通道流体振荡器的应用与研究最为广泛。
1.1 双反馈通道流体振荡器的工作原理
双反馈通道流体振荡器产生振荡射流的工作原理[38-40]如图3 所示。当流体从入口喷嘴进入到流体振荡器的混合腔时,在康达效应[4-5]的作用下,主射流会任意靠近某一侧壁面(图中示意为上侧壁面);偏转的主射流沿壁面继续流动至分流楔,分流楔把主射流划分为2 股流体,其中一股直接从出口喉道射出,另一股则沿着反馈通道流回主射流根部,并在主射流和上侧壁面之间聚集,形成分离涡泡。由于主射流的阻塞和反馈通道的供给,分离涡泡体积逐渐增大,直至使主射流无法继续附着于上侧壁面。在分离涡泡和康达效应的共同作用下,主射流向下侧壁面偏转,在外部空间产生横向振荡的效果。主射流冲击到下侧分流楔后,同样会有一部分流体进入下侧反馈通道,流回主射流根部,再次供给下侧分离涡泡的增长,并促使主射流翻转。如此周而复始,使外部射流形成连续振荡效果。

图3 双反馈通道流体振荡器原理示意图Fig.3 Schematic of a fluidic oscillator with two feedback channels
1.2 流体振荡器的特性
流体振荡器的设计最早出现于20 世纪60 年代,但其优点近10 年才逐渐被研究者熟知:无需机械与电磁部件即可产生稳定的自维持横向振荡扫掠射流;通过构型设计,可以在几赫兹[41]至几万赫兹[42]之间调节振荡频率;在高温、高压、振动等恶劣环境中仍能鲁棒运行等。流体振荡器被应用于分离控制[43]、噪音抑制[44]、钝体减阻[45]、燃烧控制[46]、换热增强[47]、混合增强[48]等领域并取得了良好的效果。除了能产生稳定的扫掠射流,流体振荡器还可以通过特殊的出口设计将出口扫掠射流转化为脉冲射流。Zhou 等[49-50]设计了一种新型高频高速脉冲式流体振荡器,射流速度可达马赫数0.7 ,振荡频率高于 1 kHz,开展了基于压力敏感涂料(pressure sensitive paint)的实验研究,揭示了高速可压缩振荡器内部压力波传输机制。
流体振荡器所产生的振荡射流在流动控制领域有其独特优势,主要来源于以下3 个方面:
1)振荡射流的扫掠特性显著增强了沿展向的控制均匀性,单个射流口所能覆盖的宽度已经明显大于喷嘴宽度,这一特性降低了射流装置排布的密度要求。
2)相比于传统定常射流,振荡射流的挟带能力有着巨大提升。从使用体视PIV 对振荡射流外流场的测量结果发现[51],振荡射流在近出口处的挟带能力是传统定常射流的4.0~4.5 倍。这主要是因为振荡射流在横向扫掠的过程中大大增加了射流与环境流体的接触面积。
3)基于流体振荡器的振荡射流具有可调的激励频率,从几赫兹[41]到几万赫兹[42]巨大频宽使其可以适应多种工况和场景。虽然双反馈通道流体振荡器等构型的激励频率不可独立于入口流量调整,但频率与流量之间的这种耦合关系是最为简单的线性关系,且还可通过一些巧妙的设计,实现频率与流量的解耦。如Adhikari 等[52]设计的基于主从概念的流体振荡器,以高频流体振荡器作为主机,将产生的高频振荡射流通向高流量输出的放大器。该放大器作为从机,与振荡器结构类似,区别在于将反馈回路连接至主机的输出,使从机中的射流得以按照主机的频率扫掠振荡,而输出流量则取决于从机自身,以此将频率与流量解耦。
此外,流体振荡器具有良好的可缩放性和可集成性,便于安置到各类控制系统中。图4 所示的通过金属3D 打印制造的毫米级流体振荡器已被用于矢量涡喷发动机等实验研究。

图4 毫米级流体振荡器Fig.4 Millimeter-scale fluid oscillator
实际上,主动流动控制应用对射流的要求很高,其中航空领域因其安全性、稳定性、方便性及经济性需要,对射流的要求尤为苛刻。振荡射流能够较好地满足这种苛刻要求,具有较大的应用潜力。
2 振荡射流在无舵面飞行控制中的应用
2.1 振荡射流在环量控制技术中的应用
正如前文所提到的,目前环量控制技术研究常以狭缝射流作为控制手段[53]。这种方式的耗气量往往较大,在经济性、高性能设计等方面表现较差。因此,研究者尝试以振荡射流替代狭缝射流,开展了一系列实验探究。
2.1.1 振荡射流在环量控制翼型中应用的实验探究
Jones 等[54]在FAST-MAC 循环控制模型的基础上进行修改,并在NASA 兰利研究中心的国家跨声速风洞设施中进行了振荡射流的应用实验,采集了升阻力数据。实验采用如图5 所示的翼型设计,射流高度与弦长之比为0.0021。在襟翼角度为30°和60°时进行了低速高升力测试,并在襟翼偏转0°时开展了跨声速巡航实验。
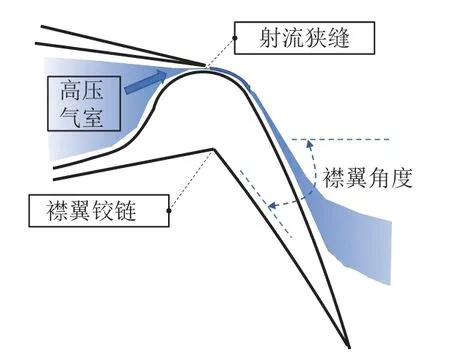
图5 Jones 等的环量控制翼型几何设计[54]Fig.5 Geometric details of the circulation control wings from Jones[54]
在低速高升力测试中发现,当襟翼角度为30°时,振荡射流能够使气流附着在襟翼上,并在仅消耗46%定常射流质量流量的前提下,提供与定常射流相当的升力增量。当襟翼角度为60°时,振荡射流提供的升力增量较小,仅能在内侧襟翼上保持气流附着,说明该设计在襟翼角度较大时存在局限[54]。在跨声速巡航实验中发现,振荡射流拥有在中等雷诺数1.5 × 107下影响翼面流动的能力。在设计马赫数0.85 下成功加速了翼面气流,并在设计升力系数0.5 下减少了1.7%的流动阻力[54]。此外,对比定常射流在非设计马赫数0.88 下减阻6.5%的控制效果,振荡射流虽然仅减阻3.3%,却减少了74%的质量流量消耗[54]。
Jentzsch 等[55]将基于振荡射流的主动流动控制装置布置在有襟翼的无尾布局飞行器模型中,用于探究飞行器的配平和控制。实验所用的SACCON模型配置如图6 所示。实验在马赫数低于0.2 的低速风洞中进行,并用压力敏感涂料将翼面压力分布可视化。
图6 SACCON 模型配置示意图[55]Fig.6 Schematic of the configuration in SACCON[55]
分别组合传统襟翼及不同数量、位置的射流器进行控制实验,结果发现,当把主动流动控制应用于模型时,可产生与襟翼控制相当的气动变化,即无论是组合控制还是单独使用襟翼或主动流动控制,都可配平或控制SACCON 模型。此外,实验还发现振荡射流阵列位于襟翼铰链附近比位于前缘更有效。
Li 等[56]在风洞中采用了如图7 所示的翼型几何设计进行实验,并采集了壁面压力数据加以分析。在实验中分别设计了连续定常射流、离散定常射流和离散振荡射流等3 种射流模式,用以探索对比连续与离散、定常与非定常之间的控制效果和机理。在翼型外部几何设计中,射流高度与康达壁面曲率半径之比为0.0455,射流高度与弦长之比为0.00262,弦长与康达壁面曲率半径之比为0.0576。
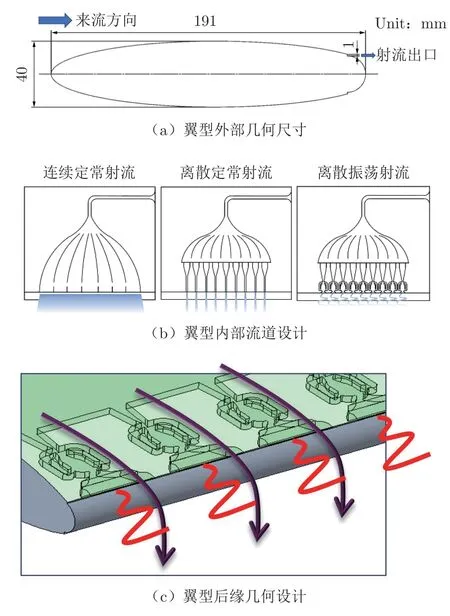
图7 Li 等的环量控制翼型几何设计[56]Fig.7 Geometric details of the circulation control wings from Li[56]
值得一提的是,虽然流体振荡器降低了耗气量,但其内部的复杂通道会带来较大的压力损失,这一特性在一定程度上制约了流体振荡器的应用[57]。针对这一问题,Li 等[56]引入的射流能量系数CE综合考虑了气源消耗和压力损失这两方面的因素。根据图8(a)中机翼升力系数CL与各射流能量系数CE之间的关系可以发现,离散振荡射流和连续定常射流的曲线基本重合,这意味着两者提升单位升力所需的能量相近,而离散定常射流的表现远不及前两者。观察图8(b)中机翼升力系数CL与各射流质量流量系数CQ之间的关系可知,离散振荡射流提升单位升力的耗气量远低于另外两者,当升力系数在0.2~0.7 时,耗气量基本都可降低40%以上。这是由于离散振荡射流以更高的压力损失为代价获得了更高的射流速度和非定常特性,从而降低了耗气量。

图8 不同射流驱动下环量控制翼型的气动特性Fig.8 Aerodynamic characteristics of different jet driven circulation control wings
离散定常射流对射流间距的敏感性较高[56],而对于离散振荡射流,即使将射流间距扩大2 倍,控制性能的下降也很有限,且射流阵列在翼展方向上的控制均匀性仍能保持良好[58]。两者作为三维射流,控制机理比二维射流更为复杂,离散定常射流主要受不同截面之间的流动融合性影响,而离散振荡射流由于耗散速率极快反而受到来流的加速。2 种离散射流在中等强度射流的某些展向截面上都出现过顺压梯度,不同于连续定常射流在康达壁面上表现出的单一逆压梯度[56]。
2.1.2 环量控制技术中振荡射流的特性
与常见的连续定常射流相比,离散振荡射流引入了非定常特性,在钝体尾缘翼型下,相同的质量流量可以获得更高的升力系数。虽然离散振荡射流有着更高的压损,但其消耗的能量并未增加,即在能耗和增升效果几乎相同的情况下,振荡射流最多可以减少48%的耗气量[56]。而在襟翼尾缘翼型中,虽然离散振荡射流和连续定常射流的控制效果各有千秋,但离散振荡射流在耗气量上仍具有明显优势[54],应用潜力更好。
对比离散振荡射流与离散定常射流发现,在相同的质量流量下,两者表现出截然不同的升力增强能力,这是由于离散振荡射流极大地增强了射流沿展向的控制均匀性,保障了离散出口的控制效果。
加工连续均匀狭缝具有一定难度,而离散供气管道的设计并未显著提升加工难度,且在离散的设计下可通过气路的局部开关带来更高的可控性。此外,振荡射流从低速[55-56]到较高速[54]的区间内均有控制效果,其鲁棒性与适应性良好。
虽然射流振荡器压力损失更高,但以此为代价获得了更高的射流速度和非定常特性[56]。考虑到制约环量控制技术实际应用的最大因素在于较大的引气量需求,因此,能量消耗相近但极大减少了高压空气需求的振荡射流更具优势。
综上所述,离散振荡射流缓解了连续定常射流带来的耗气量较大的问题,又通过横向扫掠的射流模式克服了离散出口导致的展向控制不均匀问题,在环量控制技术应用中具有广泛的实践意义。
2.2 振荡射流在流体推力矢量技术中的应用
与环量控制技术相似,降低二次流的质量流量、加强主射流与康达壁面之间的流动混合也是提高同向二次流推力矢量喷管控制性能的关键。
2.2.1 振荡射流在流体推力矢量喷管中应用的实验探究
Wen 等[59]为探究振荡射流在流体推力矢量喷管中的应用,设计了如图9 所示的实验装置,并采用高速相机的纹影装置系统获得了流场可视化数据。图9(a)展示了实验中所用矢量喷管的几何结构,从射流器中产生的二次流可以增强康达效应,并使主射流偏向二次流侧的康达壁面,Wen 等[59]设计了振荡射流器和直射流器进行对比。实验中2 个射流器为一组,分别放置于主射流喷嘴两侧。图9(b)为实验所用的高速相机纹影装置,其原理是通过光学方式捕捉工质流动产生的密度变化导致的折射率变化,进而揭示流动规律。光学设备包括1 对抛物面反射镜(直径300 mm,焦距3 m)、1 个功率可调的LED光源和1 把可以分辨密度梯度的刀。

图9 Wen 等的实验装置设计[52]Fig.9 Schematic of the experimental device design from Wen[52]
流体推力矢量喷管的控制性能可以通过主射流偏转角来评估。图10(a)和(b)分别为直射流驱动和振荡射流驱动的流体推力矢量喷管纹影结果,实验马赫数约0.68,二次流质量流量从左至右依次为主射流的1.05%、1.58%、2.10%、2.63%以及3.16%。观察图10 可以发现,当二次流质量流量为主射流的1.05%时,两者产生的主射流偏转不明显。随着二次流质量流量增加到主射流的1.58%,振荡射流控制开始获得较为明显的效果,即主射流被轻微偏转,但直射流控制没有明显效果。进一步增加二次流质量流量至主射流的2.10%,振荡射流控制下主射流产生了更明显的偏转,而直射流控制下主射流依然未有明显偏转。这种情况直至二次流质量流量增加至主射流的2.63%时才有所变化,此时,振荡射流控制下主射流已经产生巨大偏转,而直射流控制也有了一定的偏转效果。当二次流质量流量增加至主射流的3.16%时,二者均有明显的控制效果,但振荡射流控制的效果明显优于直射流控制。Wen 等[59]指出,在马赫数0.35 的主射流条件下,当二次流质量流量为主射流的1.29%时,直射流控制实现的主射流偏转角约15°,而振荡射流控制实现的主射流偏转角接近23°,已经可以满足飞机的机动控制要求[60]。在相同的二次流喷射下,振荡射流由于存在高频激励和大扩散角导致的流动混合增强效应,比直射流更能增强主射流与康达壁面之间的康达效应,有着更好的控制效果。
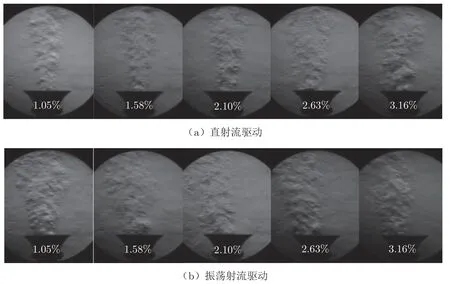
图10 二次流控制下的主射流偏转情况Fig.10 The main jet deflection under secondary flow control
2.2.2 流体推力矢量技术中振荡射流的特性
一方面,在马赫数0.35 的主射流工况下,对比振荡射流控制与直射流控制,发现在相同的质量流量下,使用振荡射流可以形成更大的射流偏转角(在二次流质量流量为主射流的1.29%时,振荡射流控制实现了接近23°的偏转角,远高于直射流控制实现的15°[59])。换言之,振荡射流可用更少的耗气量实现控制目标。
另一方面,在同样密度的射流器排布下,振荡射流的优异表现说明高频激励与大扩散角可增强流动混合,从而增强康达效应,这一特性可推广至基于康达效应的各主动流动控制场景。
因此,振荡射流可以节约流体推力矢量控制中的耗气量,具有广阔应用前景。
3 总结与展望
振荡射流作为一种自激发自维持、可调节的非定常射流,在无舵面飞行控制的耗气量节约研究中有着出色的表现。在马赫数0.8 以内的实验中,基于振荡射流的环量控制技术在大部分配置下都表现出良好的性能。除了环量控制技术,基于振荡射流的流体推力矢量技术也表现出了远超定常射流的控制效果。这意味着应用振荡射流可以大大减少发动机压气机的引气量,从而减少推力损失,缓解了无舵面飞行控制技术乃至大部分基于气动的航空主动流动控制技术的一大痛点,有着广阔的应用前景与实践意义。
总结这2 种技术不难发现,振荡射流出色的增强掺混与挟带能力使其能够较容易地诱导出康达效应,这也正是使用振荡射流能够提升无舵面飞行控制性能的机理。康达效应在基于气动的主动流动控制技术中十分常见,因此振荡射流在基于康达效应的主动流动控制当中具有较高的推广潜力。
同时也要注意到,流体振荡器内部结构复杂,在实际应用中仍存在诸多挑战,如激励器内部的压力损失较大、加工工艺复杂、激励器性能对内部几何参数敏感、射流耗散速率较快等。因此,针对流体振荡器的应用开发是一项复杂的系统工程,还需要研究者进行深入探索。
当下基于振荡射流的无舵面飞行控制已经展现出良好的工程应用前景。一方面,在振荡射流领域,应继续探索具有更高性能、更易集成、频率与入口流量可解耦等多种优点的流体振荡器构型,进一步提升振荡射流的控制效果。深入研究在高速状态下的振荡射流流动特性,以期在高性能飞机的无舵面飞行控制中稳定发挥振荡射流的优势特性。另一方面,在无舵面飞行控制领域,应探索更多的射流控制模式,设计出稳定、安全、可靠、高效的飞行控制系统,并开发配套的先进飞行控制算法。
猜你喜欢
大电机技术(2022年5期)2022-11-17
煤气与热力(2021年6期)2021-07-28
农业机械学报(2020年11期)2020-11-24
流体机械(2020年7期)2020-09-10
数字技术与应用(2020年7期)2020-08-21
舰船科学技术(2019年3期)2019-03-30
电力勘测设计(2017年4期)2017-09-08
中国医学人文(2016年7期)2016-01-24
机电信息(2015年28期)2015-02-27
山东工业技术(2014年24期)2014-10-21