
柱塞泵内泄信号的RBM-BP算法融合特征诊断
2023-09-21 03:54李晓明张建国
机械设计与制造 2023年9期
李 丹,朱 渔,李晓明,张建国
(1.上饶职业技术学院信息工程系,江西 上饶 334001;2.宜春职业技术学院信息工程学院,江西 宜春 336000;3.南昌大学机械工程学院,江西 南昌 330031;4.江西铂川自动化科技有限公司,江西 萍乡 337000)
1 引言
液压系统在实际运行过程中总是存在一定的泄漏,从而对其实际运行控制性能造成了一定的影响。由于柱塞泵属于整个系统的核心结构,其运行状态优劣会直接改变系统稳定性与安全性,因此需要对柱塞泵实际运行状态进行实时监控[1-5]。柱塞泵其泄漏量占到总泄漏量的近8%。柱塞泵在运行阶段通常会产生明显的噪声并出现机械振动,这使得柱塞泵形成了复杂的故障机制,从而无法对各类故障共振频带进行准确分析,极大增加了柱塞泵故障诊断难度[6-9]。文献[10]设计了一种通过子空间辨识方法来实现的液压缸泄漏诊断技术。根据前期文献报道可知,传统人工神经网络虽然能够实现对柱塞泵故障的诊断功能,但这是一种浅层结构,具有明显的局限性。当遇到很大的数据维数时,难以训练得到一个合适的分析模型,并且大部分通过机器学习方式构建的算法不具备特征选择功能,无法过滤去除冗余特征,从而限制了构建有效分类器模型的过程[11-12]。
文献[13]根据液压信号复杂度高与识别难度大的特征,建立了一种通过堆栈稀疏自编码器与Softmax相融合的深度神经网络,实现了柱塞泵泄漏的准确识别。通过测试发现,堆栈稀疏自编码器可以高效提取得到柱塞泵在泄漏过程中产生的高维特征,同时利用深度神经网络能够精确分析柱塞泵的泄漏情况,获得了97.5%的识别精度。文献[14]设计了一种高压航柱塞泵柱塞副泄漏量的分析模型,并在该模型中加入了油液黏压特性参数,可以精确计算出柱塞泵柱塞副在不同磨损状态下产生的泄漏量。文献[15]利用堆栈稀疏自编码器构建一种深度学习算法,可以实现对液压检测系统故障的准确识别,达到了更高的蓄能装置故障诊断率。通过仿真测试发现,该学者设计的深度学习神经网络可以达到比机器学习算法更高的准确率,为98.4%,从而准确识别出系统蓄能装置运行故障。
考虑到深度神经网络具备优异的故障识别性能,针对柱塞泵压力与流量信号特征提取难度大的问题,建立了RBM-BP网络来达到优化原始特征的作用,最后利用高级融合特征诊断柱塞泵泄漏状态。
2 理论
2.1 网络模型
对模型进行训练时包括无监督训练与监督微调两个过程。该采用受限玻尔兹曼机网络RBM堆叠的方式并结合无监督学习模式从原始数据中提取得到抽象特征。再利用有监督BP神经网络实现误差的反向传播,按照由上往下的顺序对深度置信网络参数进行微调直到获得最优网络模型。
RBM中的输入层属于显层,输出层属于隐层,依次构成一个无监督学习的随机能量模型。输入层与输出层保持全连接的状态,受限玻尔兹曼机的网络结构,如图1所示。

图1 RBM的网络结构Fig.1 Network Structure of RBM
输入层包含了n个神经元节点,输出层包含了m个神经元节点,w表示输入层和输出层连接权重。以下为输入层神经元节点v和输出层神经元节点h之间的能量关系式:
式中:vi—输入层第i个神经元的运行状态;hj—输出层第j个神经元的运行状态;θ={wij,ai,bj}—受限玻尔兹曼机树值;wij—输入层第i个神经元和输出层第j个神经元的连接权重;ai、bj—输入层和输出层神经元偏执值。
利用能量函数构建得到以下的联合概率分布函数:
2.2 网络构建
设计了一种三层结构深度置信网络,其中,堆栈受限玻尔兹曼机含有二个隐含层以及一个BP神经网络,该网络的具体结构,如图2所示。对深度置信网络进行训练时是按照由自下往上的顺序逐层训练RBM:先把代表压力与流量信号的初级特征输入第一个RBM1并对其实施无监督训练;经过训练后,第一个RBM1可以保留输入数据的初级特征,同时利用抽象提取的方式得到高级特征,再以高级特征训练第二个RBM2;通过第二个RBM2提取高级特征,获得最终融合特征。再把上述融合特征输入顶层BP神经网络完成有标签的监督学习训练过程,最后利用误差反向传播算法调整深度置信网络参数,直到模型获得最佳性能。

图2 RBM-BP结构Fig.2 RBM-BP Structure
2.3 方法流程
先对压力与流量信号样本实施分类,并利用小波变换与希尔伯特-黄变换算法获得各样本低级特征,接着利用上述低级特征建立高维特征集并设置训练集与测试集,通过训练集完成深度置信网络的训练过程,依次采用无监督特征学习与有监督微调的方式获得最优模型,最后通过测试集评价了RBM-BP控制性能。为验证上述方法的优越性,将其与多隐层极限学习机与堆栈稀疏自编码器进行了比较。具体测试流程,如图3所示。
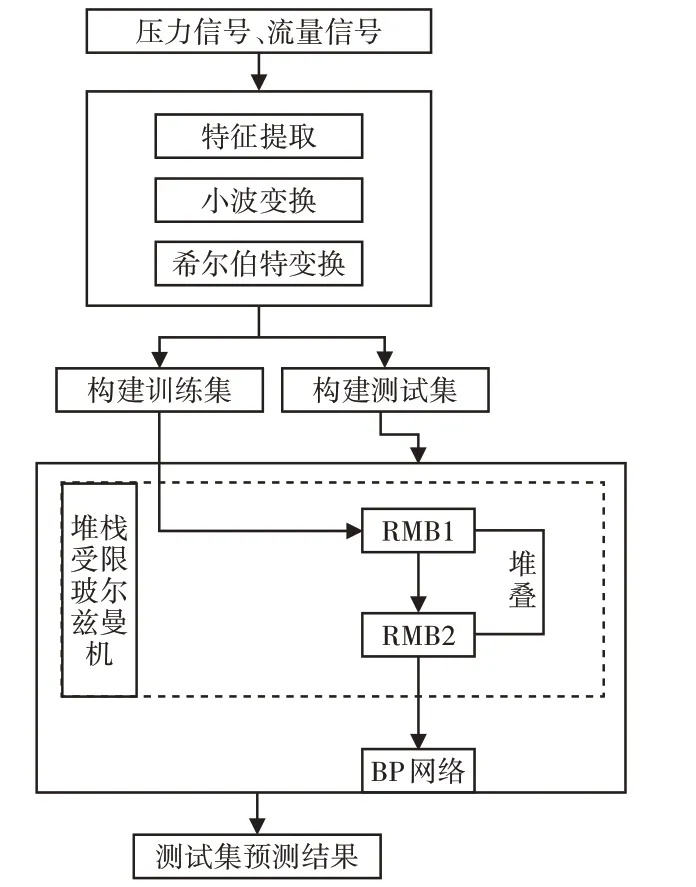
图3 实验流程图Fig.3 Experimental Flow Chart
3 实例验证
3.1 数据描述
从UCI机器学习数据库中提取本实验的系统数据集。对柱塞泵MP1主回路进行监测得到该数据,系统在恒定负载下循环测试1min,同时测试得到压力与流量参数。从主回路中选择3个压力传感器参数,同时选择1个流量传感器(FS1)参数。其中,压力传感器以100Hz频率进行采样,流量传感器以10Hz频率进行采样。
为深入研究RBM-BP 网络优化原始特征的性能,对原始特征和学习得到结果,如图4所示。图4是对原始特征进行t-SNE可视化处理形成的散点图,结果显示,三类故障的散点图存在交叉与重叠现象,表现为无规则聚集的形态。由此可以判断原始特征集类与类之间出现了冗余特征,因此总体上未达到良好的聚集状态。可以明显发现,三种故障类与类之间表现为紧密聚集的状态,其中,类内间距显著减小,而类间间距发生了显著增大,达到了良好可分性。以上结果表明,深度置信网络在学习原始特征方面表现出了较强学习能力,从而实现在保留原始特征内在结构的条件下消除原始特征冗余,实现原始特征的抽象提取,达到优化原始特征的作用,确保高级特征能够更准确完成柱塞泵内泄分级与诊断过程。

图4 特征可视化分析Fig.4 Visualization Analysis of Features
3.2 实验结果
将收集到的各样本分成由250个样本组成的测试集与150个样本组成的训练集。这里设计的三层深度置信网络含有二个隐含层的受限玻尔兹曼机带以及一个BP神经网络。关于如何设置训练RBM-BP的参数尚未形成统一方法,通常都是需要经过多次测试后,再根据测试结果进行微调使RBM-BP获得最优性能。根据深度学习理论可知,当网络隐含层数与节点数逐渐增加后,将更易从原始数据里抽取得到有意义的特征参数,但也更易导致网络模型发生过拟合情况,同时增加了计算量与运行成本。RBMBP各层隐含节点依次为20、10、3,将学习率设定在0.0001,总共训练1000步,采用上述参数对柱塞泵内泄状态进行诊断测试表明是满足适用条件的。受空间因素的制约,对RBM-BP进行一次随机测试得到的结果,如图5所示。通过测试发现,所有正常泄漏样本都被准确预测,微弱泄漏与严重泄漏都出现了1个样本发生错误预测情况。

图5 RBM-BP的诊断结果Fig.5 Diagnostic Results of RBM-BP
由于网络层数会对分类结果产生较大影响,因此构建了N层SSAE、RBM-BP、H-ELM并对其进行了比较。从理论层面分析,在训练集规模足够大情况下,当深度网络层数增加后,可以获得更优的分类效果,由于这里的研究只能提供有限的可用数据,因此最多只对6层网络进行分类分析,当网络层数继续增加时将会出现过拟合现象,从而引起诊断正确率的降低,并且训练时间也会明显延长。在不同隐含层数下分别对3种深度学习模型进行识别测试结果,如图6所示。其中,RBM-BP在隐含层为2时获得了最高的正确率,继续增加隐含层数时,正确率发生了降低。当隐含层增加到4时,正确率升高至97.6%,但由于隐含层数增加后也会引起计算量与网络训练时间的明显提高,因此以包含2个隐含层的RBM-BP来诊断柱塞泵的内泄。通过对比发现,SSAE与H-ELM在各层中都表现出比RBM-BP更低的识别率,由此可以判断,RBM-BP具备优于对比模型的柱塞泵内泄状态诊断性能。
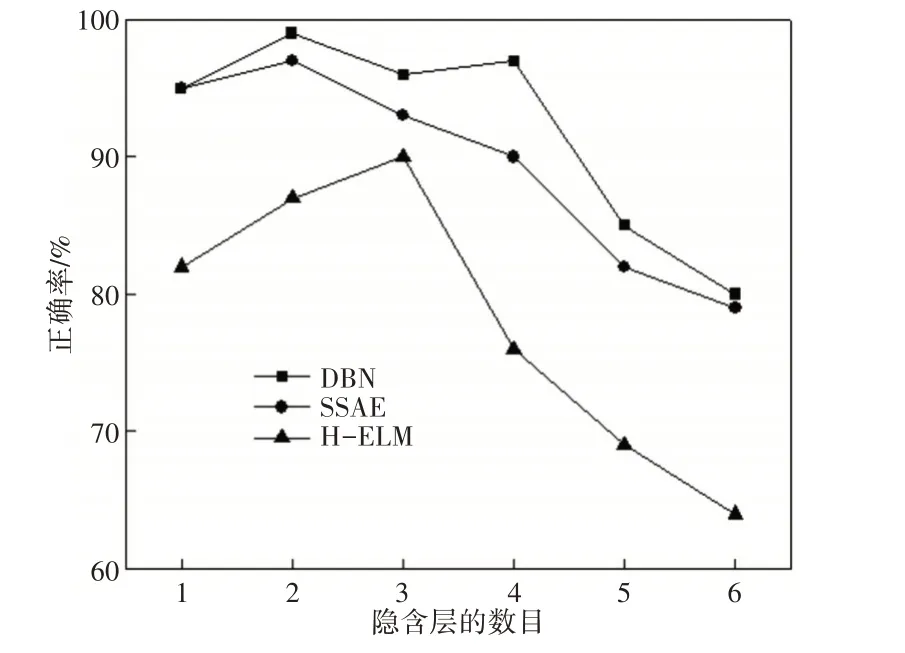
图6 不同层数分级结果Fig.6 Grading Results of Different Layers
为比较所提方法的性能稳定性,依次对RBM-BP、SSAE、HELM随机测试20次,测试准确率结果,如图7所示。通过对比发现,该方法在20次随机测试中都获得了比SSAE与H-ELM更高的准确率,同时准确率波动性也比SSAE 与H-ELM 更小,表明RBM-BP模型达到了更优的稳定性。计算20次随机测试的结果平均值可以得到,RBM-BP为98.63%,SSAE模型为95.61%。HELM模型则只有85.64%,如表1所示。根据以上结果可以判断,RBM-BP表现出了对柱塞泵内泄状态更强辨识能力与稳定性。

表1 诊断模型性能对比Tab.1 Performance Comparison of Diagnostic Models

图7 测试准确率结果Fig.7 Test Accuracy Results
4 结论
(1)所有正常泄漏样本都被准确预测,微弱泄漏与严重泄漏都出现了1个样本发生错误预测情况。相比较SSAE与H-ELM,RBM-BP在各层中都表现出比更低的识别率
(2)RBM-BP方法在测试中都获得了比SSAE与H-ELM更高的准确率,准确率波动性也更小,表明RBM-BP模型达到了更优的稳定性,表现出了对柱塞泵内泄状态更强辨识能力与稳定性。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
自然杂志(2021年6期)2021-12-23
装备制造技术(2020年3期)2020-12-25
电子制作(2019年19期)2019-11-23
电子测试(2018年11期)2018-06-26
现代装饰(2018年5期)2018-05-26
重型机械(2016年1期)2016-03-01
探测与控制学报(2015年4期)2015-12-15
大连工业大学学报(2015年4期)2015-12-11
电源技术(2015年5期)2015-08-22
