
基于虚拟科氏力的半球谐振陀螺带宽电学自标定方法
2023-09-20 12:37李天元唐兴缘
压电与声光 2023年4期
李天元,李 崇,潘 瑶,唐兴缘
(1.中国海洋大学 微系统及精密控制实验室, 山东 青岛 266000;2.国防科技大学 前沿交叉学科学院, 湖南 长沙 410073)
0 引言
半球谐振陀螺(HRG)具有高精度、高可靠性及长寿命等优势,在当今世界陀螺仪发展中越来越重要。自20世纪60年代起,半球谐振陀螺的研究开始蓬勃发展,90年代其逐步运用于深空探测。如今半球谐振陀螺已在舰船、卫星及导弹等武器装备上发挥导航、定位和姿态控制等关键作用[1-2]。在众多研究领域中,对半球谐振陀螺带宽的独立表征与改善动态性能成为提高半球谐振陀螺动态性能最关键的研究方向之一。
一直以来,对半球谐振陀螺带宽的表征依赖于高精度角振动台,通过搭载陀螺进行物理旋转的方式实现带宽测试。此方法受限于设备大角加速度,控制系统精确度,设备运行引起环境高频噪声等各项不理想因素,难以实现≥10 Hz量级的带宽测试。
本文从半球谐振陀螺动力学原理出发,提出一种新型电学带宽自标定方法,可独立于外部贵重仪器对半球谐振陀螺带宽进行方便、迅速、准确标定测试,为半球谐振陀螺带宽标定开辟了新路径。其应用意义主要在于:
1) 与控制算法配合,促进高性能力平衡控制器的快速设计、优化和迭代。
2) 减少精密设备占用率,提高大批量半球谐振陀螺带宽标定的效率。
1 半球谐振陀螺动力学原理
1.1 基本运行原理
半球谐振陀螺是一种基于科里奥利力对角速率进行检测的新型惯性器件[3]。其理想动力学模型如图1所示。使用以下微分方程可以表示理想情况下半球谐振陀螺动力学模型:

图1 半球谐振陀螺理想动力学模型
(1)
式中:m为陀螺等效质量;Fx,Fy分别为X、Y振动模态方向上的驱动力;cx,cy分别为X、Y振动模态的阻尼耦合系数;kx,ky分别为X、Y振动模态的刚度耦合系数,x(t),y(t)分别为陀螺X、Y振动模态方向上的位移;Ωz为以Z为轴,处于XY平面内的外部角速率输入;λ为角增益系数,-fx(t)=Fxcos(ωxt)和+fx(t)=Fxcos(ωxt)分别为X、Y振动模态受到的科氏力。
1.2 运动学方程求解
规定激励力fx(t)=Fxcos(ωxt),求解此时的动力学方程的解可得:
(2)
y(t)=r(t)sin(ωt)+s(t)cos(ωt)
(3)
式中s(t)、r(t)为基带信号。利用其频率远低于陀螺仪载波频率的特点,通过相干解调和低通滤波后可将基带信号与陀螺载波信号分离,随后检测基带信号便可获取其中包含的陀螺角速率信息[4]。此时,半球谐振陀螺开环系统的-3 dB带宽为
(4)
由式(4)可知,带宽与品质因数(Q)值成反比。半球谐振陀螺由于自身加工精度高,石英材料能量损耗小的特性其表现出极高Q值,这提高了陀螺仪的分辨率,但系统开环带宽受到限制,动态性能降低[5]。因此必须设计合理控制回路,提高半球谐振陀螺闭环带宽。
2 引入虚拟电旋转的力平衡控制
2.1 力平衡控制方案
综上分析可知,本文为提高半球谐振陀螺闭环带宽,设计力平衡(FTR)控制回路。其核心原理是将检测模态同向信道的输出值作为反馈信号,经由控制器控制敏感模态电极,从而将同向信道上的信号抑制到0[6]。此时,力平衡控制器的输出抑制力幅值即可代表陀螺检测到的实际角速率输出Ω。
本文选用增量式微分、积分、比例(PID)作为力平衡环路的控制器,如图2所示。图中,U(K-1)、U(K)分别为前一时刻和此刻的输入量。在闭环状态下,其等效改变了半球谐振陀螺敏感模态的传递函数性质,通过合适的参数设计得到的PID控制器,可以达到提高陀螺闭环带宽、提升动态性能的目的。
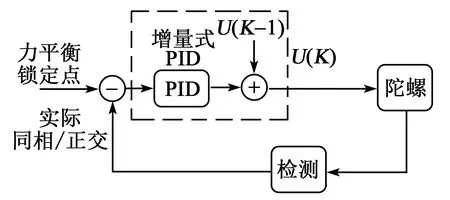
图2 力平衡环路设计
2.2 虚拟电旋转方案
力平衡控制回路在原理上提高了半球谐振陀螺的理论带宽,还需通过实际测试验证控制回路对带宽的扩展效果。根据前文所述,传统测试方法必须通过角振动台配合陀螺仪进行物理振动实现对其带宽的表征。角振动台的角加速度及频率量程等参数都会限制测试结果,仅有部分高精度角振动台可满足50 Hz带宽测试要求。同时,设备运行时产生的环境噪音会导致带宽测试波形畸变增加测试难度。因此,只能通过提高角振动台精度并减小环境噪声的方法解决上述问题,但这将导致带宽测试成本大幅度增加,降低测试效率。本文提出虚拟电旋转的方法表征陀螺带宽,其可以不依赖角振动台对带宽实现直接表征,减少了对测试仪器的依赖及测试环境的限制。同时,高频电信号可以摆脱物理旋转的局限性,从而提高带宽的测试范围。虚拟电旋转的原理是生成带有驱动模态角速率信息的电激励信号并反馈给敏感模态,其表达式为
(5)

当半球谐振陀螺工作在力平衡模式下时,FTR环路输出值等效于陀螺的角速率。此时为半球谐振陀螺施加电激励信号,力平衡回路的输出信号将呈现出正弦波形式。陀螺等效于在角振动台上进行简谐运动,运动的角度和频率与电激励的幅值和频率一一对应。根据带宽与幅值的关系,假设半球谐振陀螺闭环状态在低频段幅值无衰减,力平衡回路的输出信号幅值下降到原来的0.707时,此时频率即为其-3 dB带宽。
根据上述理论分析,本文在第2.1节所设计的力平衡控制回路的基础上,引入电激励信号,将电激励信号加入力平衡输出中再反馈给陀螺,系统设计如图3所示。图中,C1(s)、C2(s)分别为力平衡环路两模态的传递函数。

图3 加入高频电激励的系统设计
3 测试与实验
通过相应的实验方法测试半球谐振陀螺自身性能、开环动态性能、虚拟电旋转的可靠性与准确性、以及力平衡控制器对半球谐振陀螺带宽的提升程度。
3.1 初始测试结果
针对某半球谐振陀螺进行各项性能测试,本文对其进行扫频、Ring down测试,得到开环系统初步辨识结果。扫频曲线如图4(a)所示。两模态间频差小于0.01 Hz,表明陀螺具有较高的对称性。Ring down结果如图4(b)所示,整个过程耗时20min。根据图4(a)、(b)可计算出陀螺-3 dB带宽小于0.000 3 Hz。随后根据式(4)中给出的带宽与Q值关系,计算得到陀螺的Q≈5.50×106。
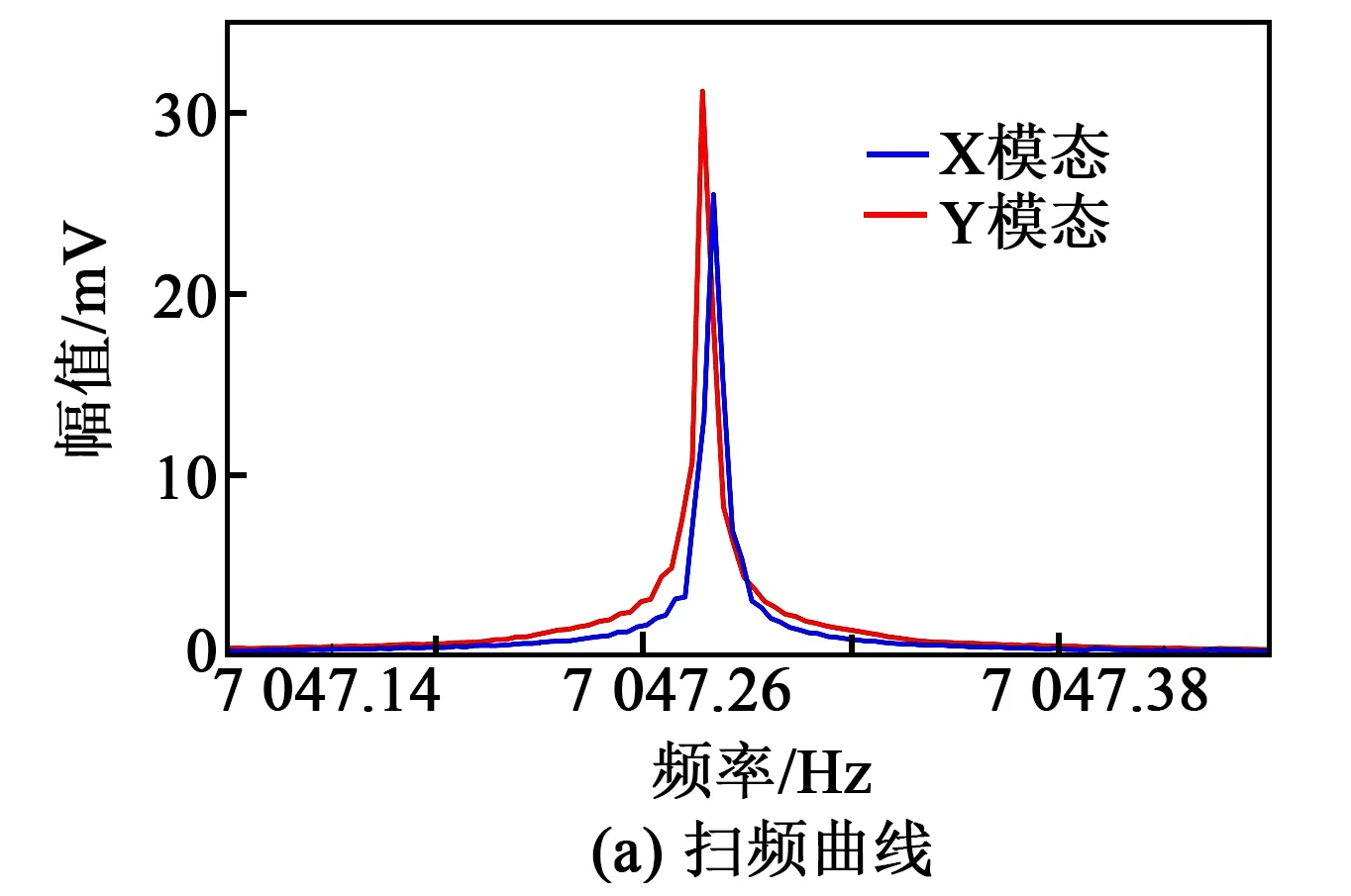
图4 半球谐振陀螺性能测试
以上述测试与计算结果为基础,本文利用Matlab软件对开环状态下半球谐振陀螺的动态性能进行系统辨识,得到频率响应如图5所示。由图可知,开环状态半球谐振陀螺带宽为0.001 7 rad/s(即0.000 27 Hz),理论分析与实际测试得到吻合。
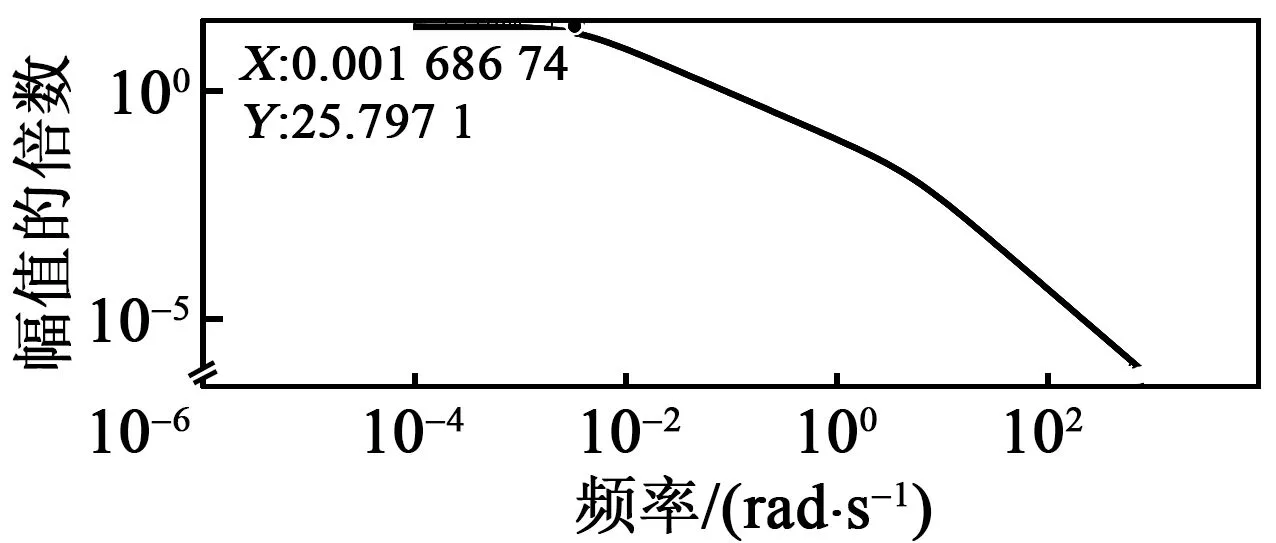
图5 开环频率响应
3.2 电激励信号测试
为了检测虚拟电旋转功能的可靠性,对第2.2节中设计的引入虚拟电旋转后的控制回路进行电学测试。由控制系统生成幅值20 mV、频率由0.5 Hz渐变到50 Hz的变频电激励信号,通过上位机记录电激励信号波形与幅值,检测结果如图6所示。对电激励信号信噪比进行测试,信号误差绝对值小于0.6 mV,信号信噪比良好,可以满足测试带宽的需求。
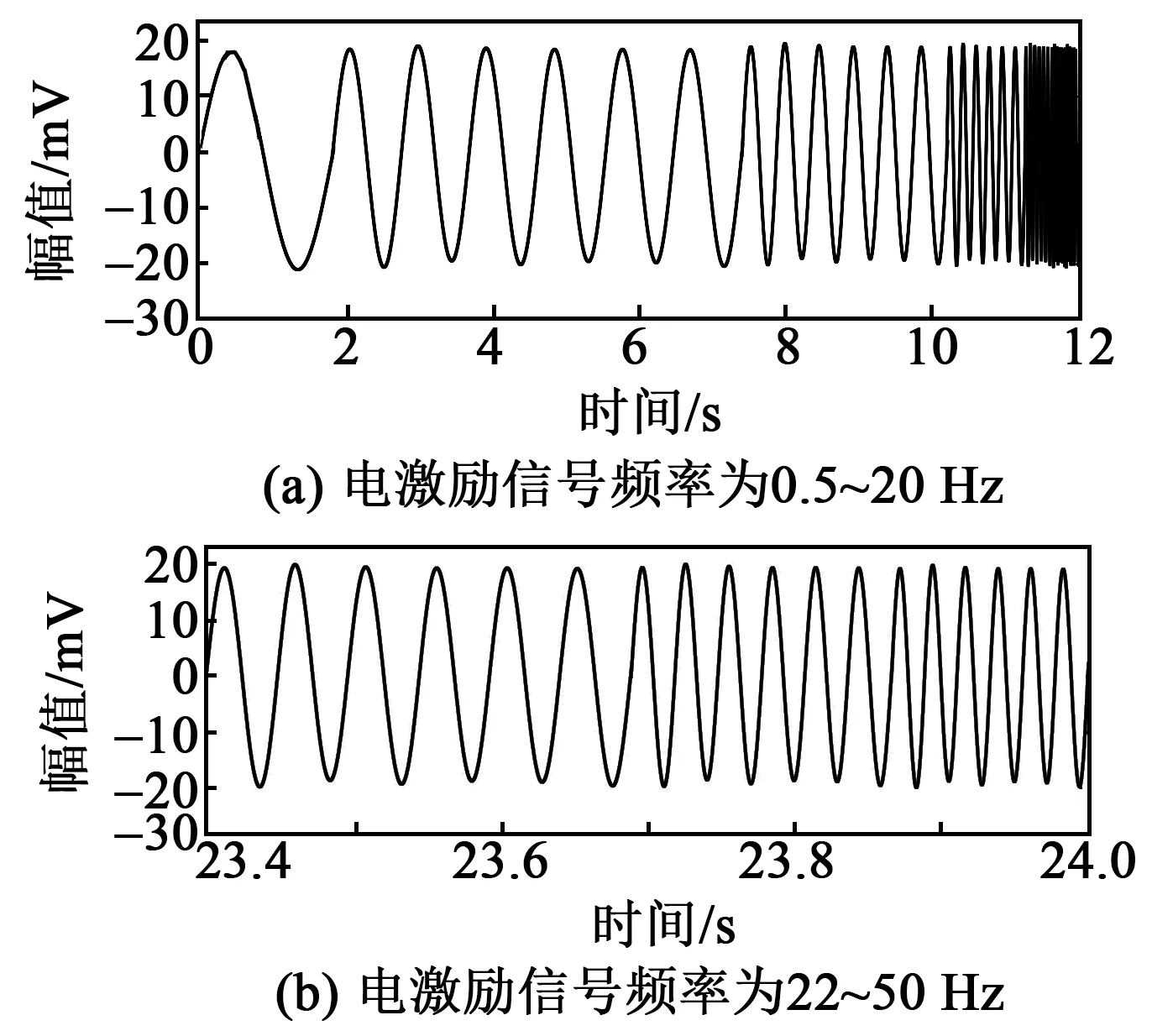
图6 电激励信号实测
3.3 综合测试结果
在某半球谐振陀螺测试回路中,加入虚拟电旋转与力平衡控制验证带宽测试效果及力平衡回路对于动态性能的提升效果。将电信号激励分别加入开环与闭环陀螺系统中,从而更易观察幅值,检测结果更明显,电激励信号频率为0.000 2~0.010 0 Hz,幅值为50 mV。角速率输出幅值结果如图7所示。开环情况下,角速率信号幅值迅速衰减,在0.01 Hz时已仅剩噪声,结果与第3.1节的测试结果相对应。

图7 开环系统角速率信号输出
对于闭环系统,通过PID控制,待系统稳定后引入0.5~20 Hz、幅值50 mV的电激励信号,得到角速率输出信号如图8所示。电信号频率为0.5 Hz时,输出信号峰-峰值为 99.33 mV,而电信号频率为18 Hz时,输出信号峰-峰值为70.24 mV。由于电信号频率为18 Hz时,输出峰-峰值下降到低频段的0.7071。因此,系统闭环带宽为18 Hz。角速率信号不随电信号频率的上升持续下降,在电信频率约为13 Hz时,输出峰-峰值表现出上升的趋势,这是由于PID控制器等效改变了零极点分布,系统闭环传函随之改变。
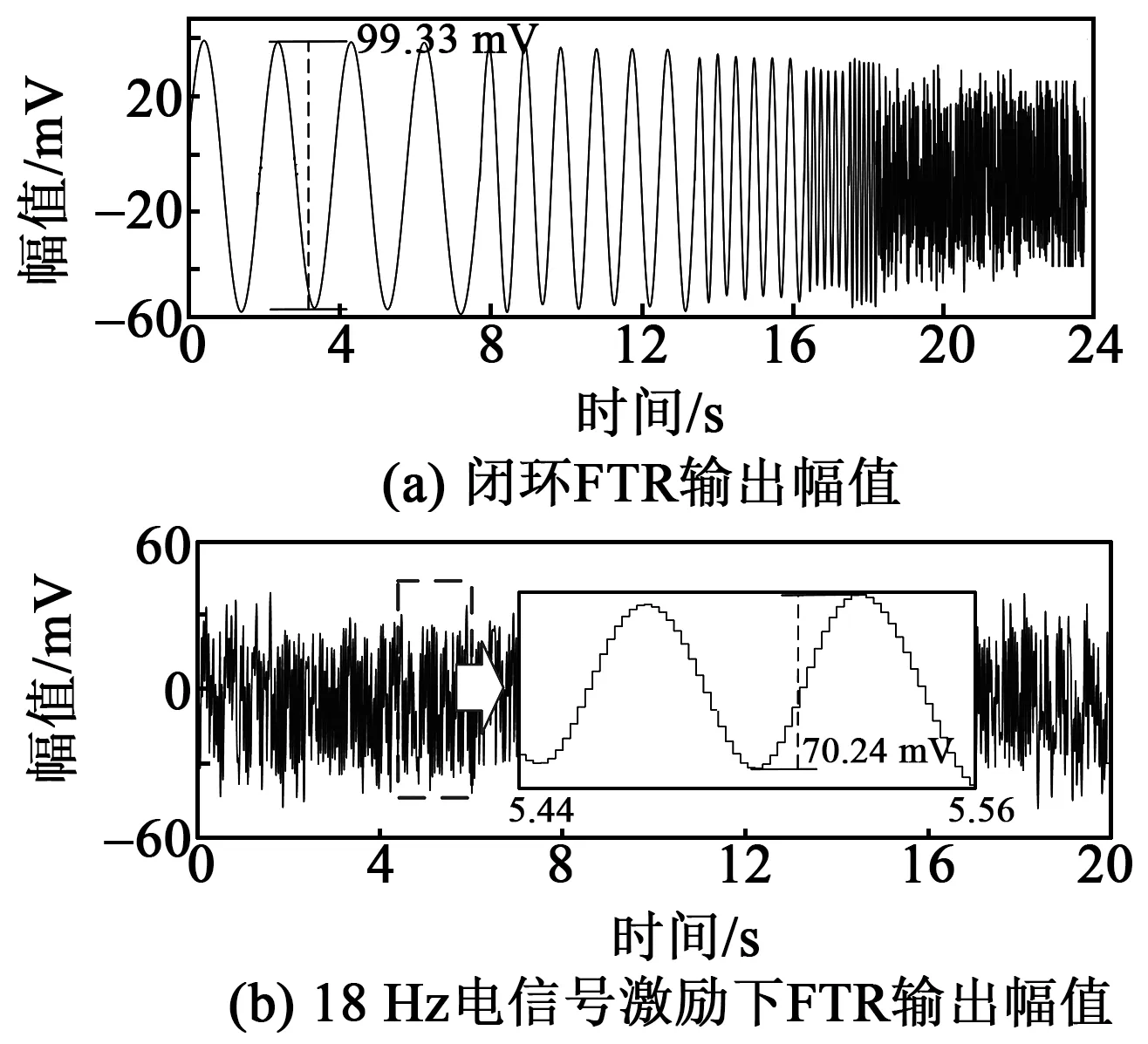
图8 加入虚拟电旋转测试带宽
图8(b)中输出幅值表现出一定的波动,但绝大部分信号误差小于幅值的1%,证明虚拟电旋转在实际应用方面具有工程意义。为了印证上述测试结果,再次利用Matlab对半球谐振陀螺闭环系统进行辨识,结果如图9所示。
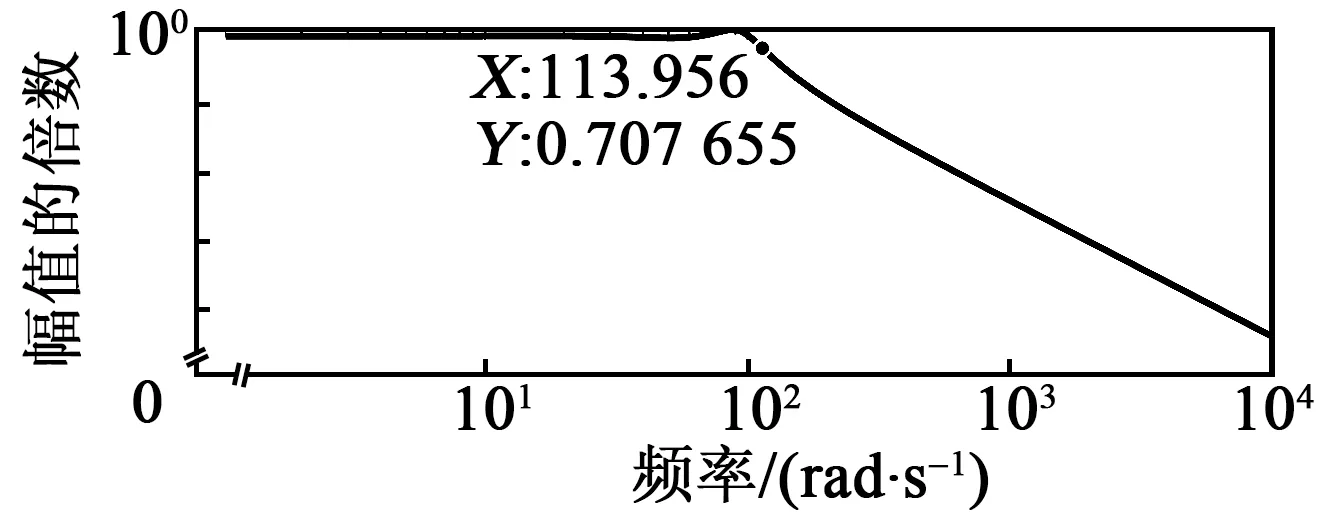
图9 闭环频率响应
对比图9、5可得,力平衡控制回路的加入极大地提升了半球谐振陀螺的带宽(约为113 rad/s,即17.99 Hz)。
对比图9、8可印证本文所提出的带宽自标定方案具备正确性,说明:
1) 引入电激励能够不借助角振动台独立实现半球谐振陀螺带宽自标定,减少设备依赖,从而提高生产效率。
2) 此自标定方案可配合力平衡控制回路,对力平衡控制器的设计与进一步的优化迭代具有指导意义。
4 结束语
改善陀螺动态性能,首先对其开环系统进行辨识,针对性的进行控制器设计。本文通过半球谐振陀螺动力学理论研究提出力平衡控制回路提高半球谐振陀螺带宽;通过虚拟电旋转方法实现对陀螺带宽的精确测试,为半球谐振陀螺提供了一种不借助仪器进行带宽表征的方案。实测结果表明,力平衡控制对于半球谐振陀螺带宽有显著提升;虚拟电旋转带宽自标定方案可以在物理意义上模拟实际旋转,达到不借助其他仪器测试半球谐振陀螺系统带宽的目的,独具低成本、高效率、便捷的优势。
猜你喜欢
数学年刊A辑(中文版)(2023年4期)2024-01-04
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
电子测试(2018年1期)2018-04-18
快乐语文(2018年36期)2018-03-12
中国化肥信息(2016年33期)2016-05-17
合成化学(2015年4期)2016-01-17
海军航空大学学报(2015年1期)2015-11-11
振动、测试与诊断(2014年6期)2014-03-01
