基于驾驶行为特性的AEB系统控制策略研究
2023-09-18 13:33:28程剑锋刘云鹏
河南科技大学学报(自然科学版) 2023年6期
杜 峰,程剑锋,齐 蕾,杜 琼,刘云鹏,徐 慧
(1.智能车路协同与安全国家地方联合工程中心, 天津 300222;2.天津市智能交通技术工程中心,天津 300222;3.天津职业技术师范大学 汽车与交通学院,天津 300222)
0 引言
自动紧急制动系统(autonomous emergency braking system,AEB)可有效降低交通事故发生的概率[1],E-NCAP与我国C-NCAP也在逐步优化AEB测试方案,未来AEB系统会逐渐成为汽车的标配[2-5]。
AEB系统能否实现良好的避撞,主要在于AEB系统的控制策略能否根据车辆间实时的相对运动状态及其运动趋势做出精准的判断,并采取预警或制动处理[6-8]。当前的AEB控制策略主要分为基于安全距离模型和基于安全时间模型2种[9-10]。文献[11]提出了1种通过设置制动缓冲区优化制动减速度曲线的新型安全距离模型,与传统安全距离模型相比,在乘车舒适性上有所提高,但为单级制动策略,且制动减速度居于最大值的时间较长。文献[12]设计了1种利用模糊控制直接控制制动主缸压力的安全距离模型,该控制策略可根据相对车速、距离的实时变化对主缸压力及时调整。文献[13]通过对传统的安全距离模型(Mazda(马自达)、Honda(本田)等模型)与碰撞时间(time-to-collision,TTC)模型进行对比仿真,得到以对驾驶员正常驾驶的干扰性为评价指标,TTC模型最优的结论。此外,基于TTC模型的AEB控制策略也是目前最常用的AEB系统避撞算法。文献[14]通过对驾驶员的分类,考虑了不同驾驶员反应时间对TTC的影响,针对TTC阈值进行了修正,但该控制策略中制动减速度波动不够平顺且峰值波动较大,乘车舒适性不足。基于TTC模型的算法比基于安全距离模型的算法更符合驾驶员驾驶行为特性,乘车舒适性和车辆安全性也更高,但如何在不同工况、环境等因素的影响下,选择合适的预警与制动介入时机以及制动减速仍是目前AEB系统的重要研究内容。
本文在TTC模型的基础上,针对不同车速下所需的制动时间与制动减速度具有较大差异的问题,将车速分为低速、中速和高速3种状态,并设计了基于驾驶员在环的模拟驾驶实验,研究了不同车速下的驾驶员制动行为特性。结合采集的驾驶员数据,确定合适的预警时间阈值、制动触发时间阈值及其对应的制动减速度,设计了两级预警和两级制动控制策略,以提高AEB系统的可靠性和实用性。
1 车辆动力学模型与AEB系统控制策略分析
1.1 车辆动力学模型
CarSim软件因其内置较为全面的整车数据,且与Matlab/Simulink等平台具有较好的兼容性接口而被行业内广泛使用。本文采用CarSim软件完成主车与前车的整车模型配置,并基于实车参数对CarSim中的车辆模型进行优化,车辆动力学参数如表1所示。搭建仿真所需的场景、道路、传感器等信息,如图1所示。

表1 车辆动力学参数
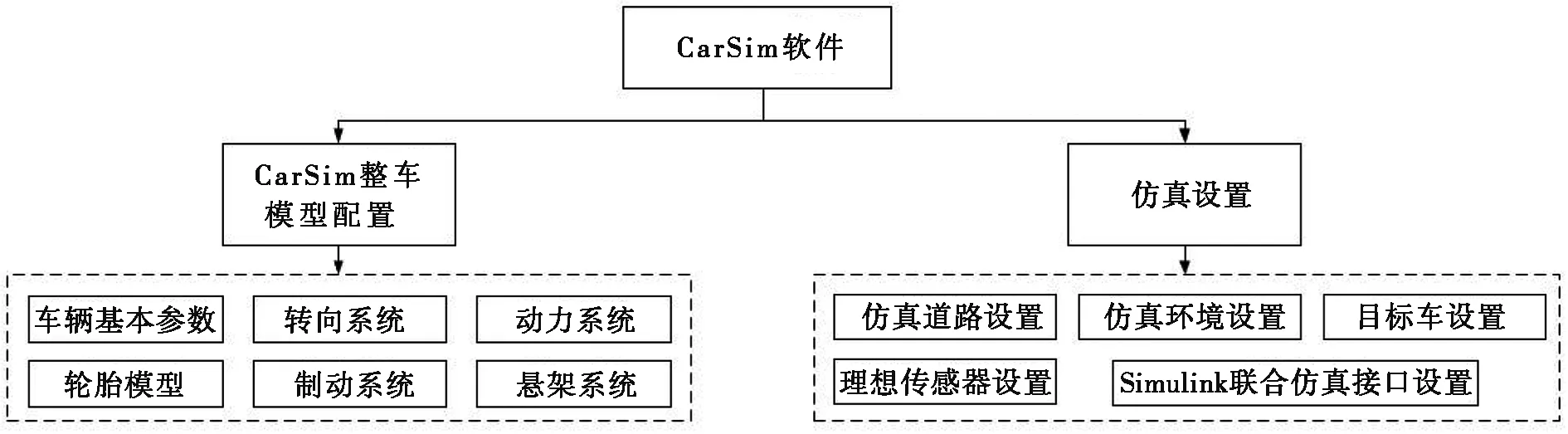
图1 CarSim 仿真配置
1.2 AEB系统控制策略分析
本文在对AEB系统进行研究时,在确保AEB系统能够实现良好紧急避撞效果的前提下,考虑到实际交通环境的复杂性,优先将车辆的控制权交由驾驶员。一方面,为了使AEB系统的制动更加符合驾驶员驾驶习惯,不同车速下制动完成后本车与前车需保持大致相同的安全距离,以确保AEB制动介入的时机与期望制动减速度值搭配的合理性。另一方面,从驾驶员角度考虑,两级FCW预警更有助于提醒驾驶员车辆即将处于危险状态。若预警后驾驶员仍未做出处理,则先采取较小的一级制动,既可以先降低车速,又可以更为明显地提醒驾驶员做出主动制动或合适条件下换道等避障措施,只有驾驶员未做任何举措时,AEB系统才会全部介入并确保车辆的安全性。
具体方法为,在CarSim中设定理想传感器来获取自车与前车的相对运动状态,然后计算得到实时TTC值,再与设定的TTC阈值作对比,从而决策出预警与制动是否触发。在Matlab/Simulink中建立车辆逆动力学模型,将制动减速度转化为制动主缸压力,通过模糊PID控制器实现对制动主缸压力的精准控制,并将其输入到CarSim整车模型。由于车辆在紧急制动的过程中可能会出现车轮抱死的情况,结合本次研究的实车参数对CarSim中的ABS模型进行优化,设置车辆速度在高于3km/h时默认开启ABS,并将滑移率控制在15%~20%。AEB系统工作流程如图2所示。
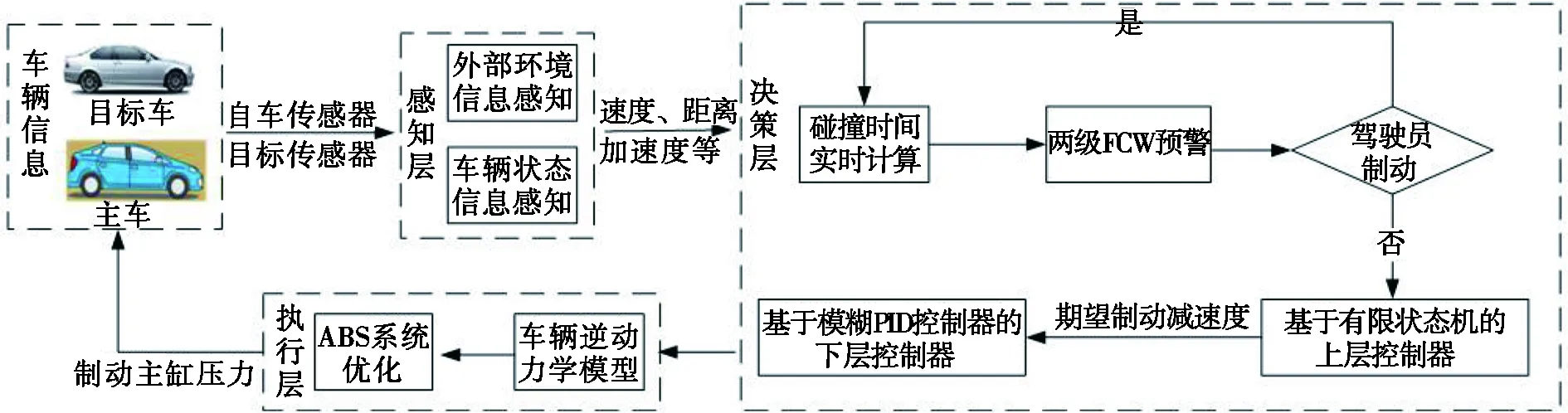
图2 AEB系统工作流程
2 上层控制器建立
2.1 TTC模型
TTC模型即预碰撞时间模型,指前后车在保持一定速度差的相对运动状态下,后车前进到与前车发生追尾所需的时间。计算公式如下:
(1)
其中:Drel为前后两车相对距离,m;Vrel为前后两车相对速度,m/s。
在CarSim中设置理想传感器即可获取两车相对距离与速度,从而计算得到实时的TTC值。当Vrel过小时,会出现TTC无穷大的情况,因此设定Vrel最小值为0.01 m/s。
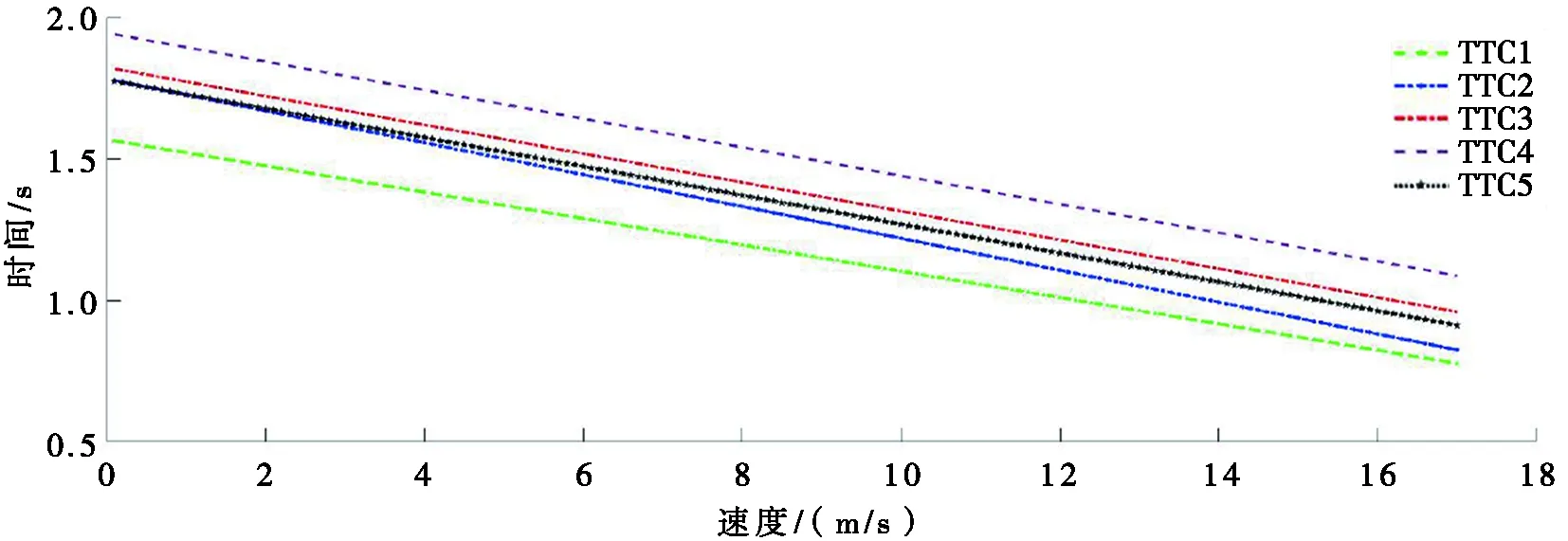
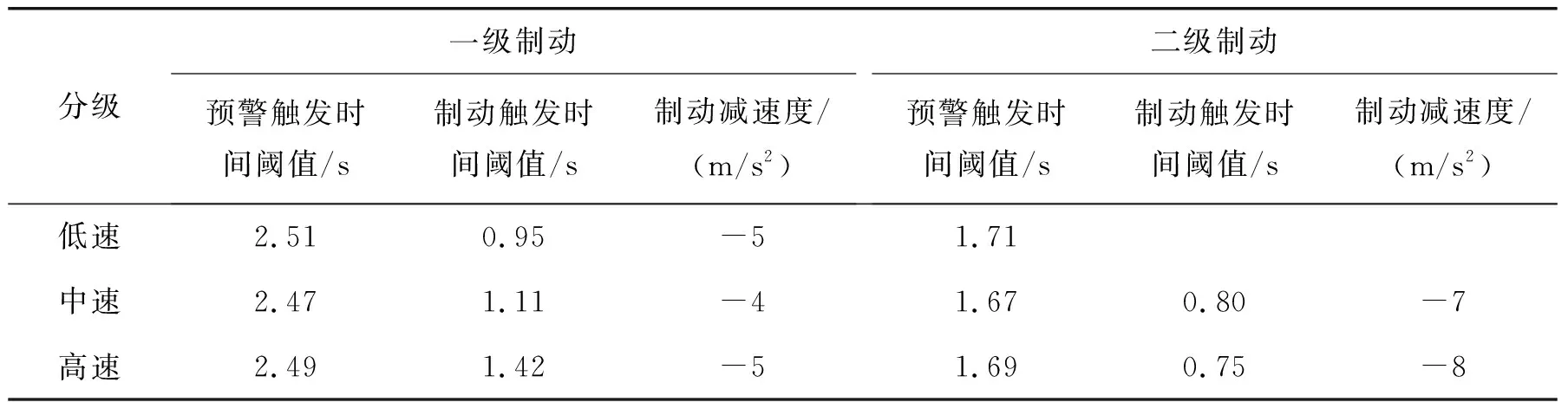
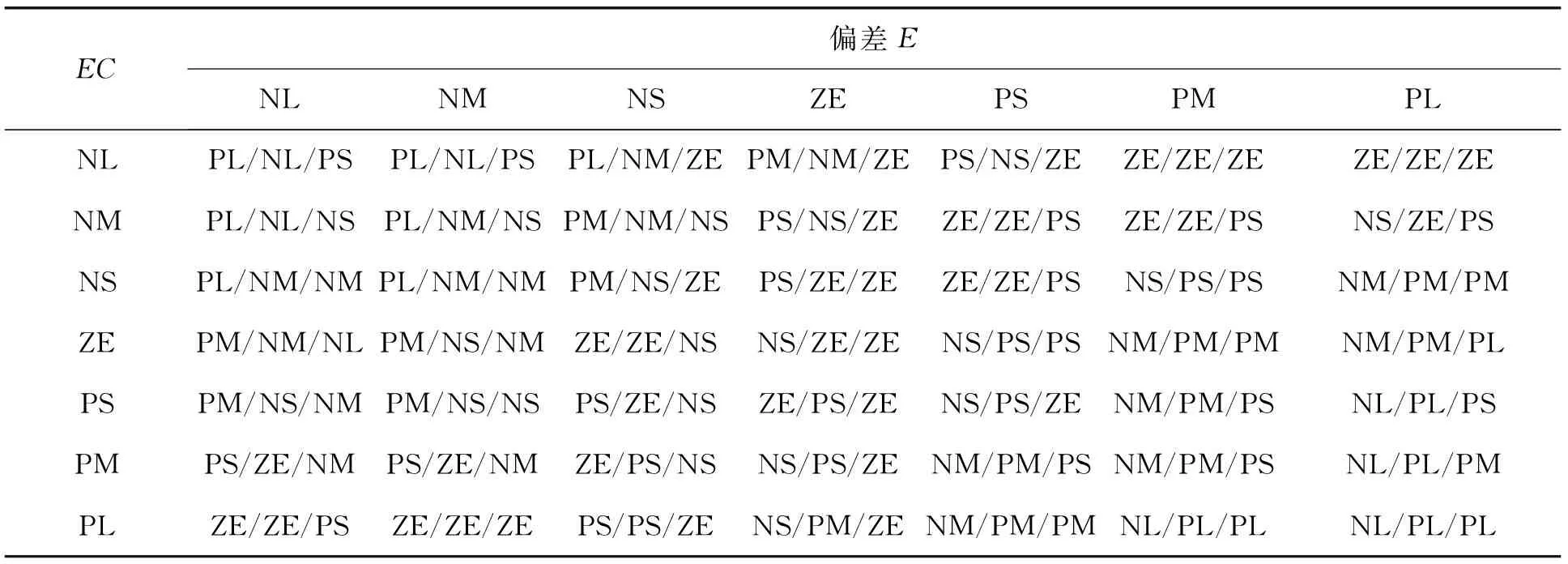
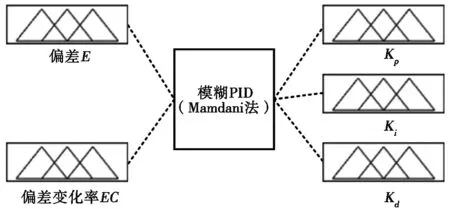
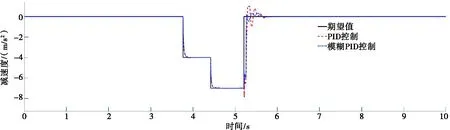
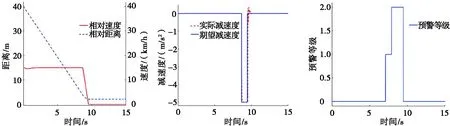
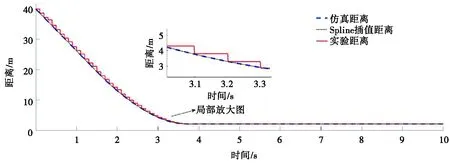
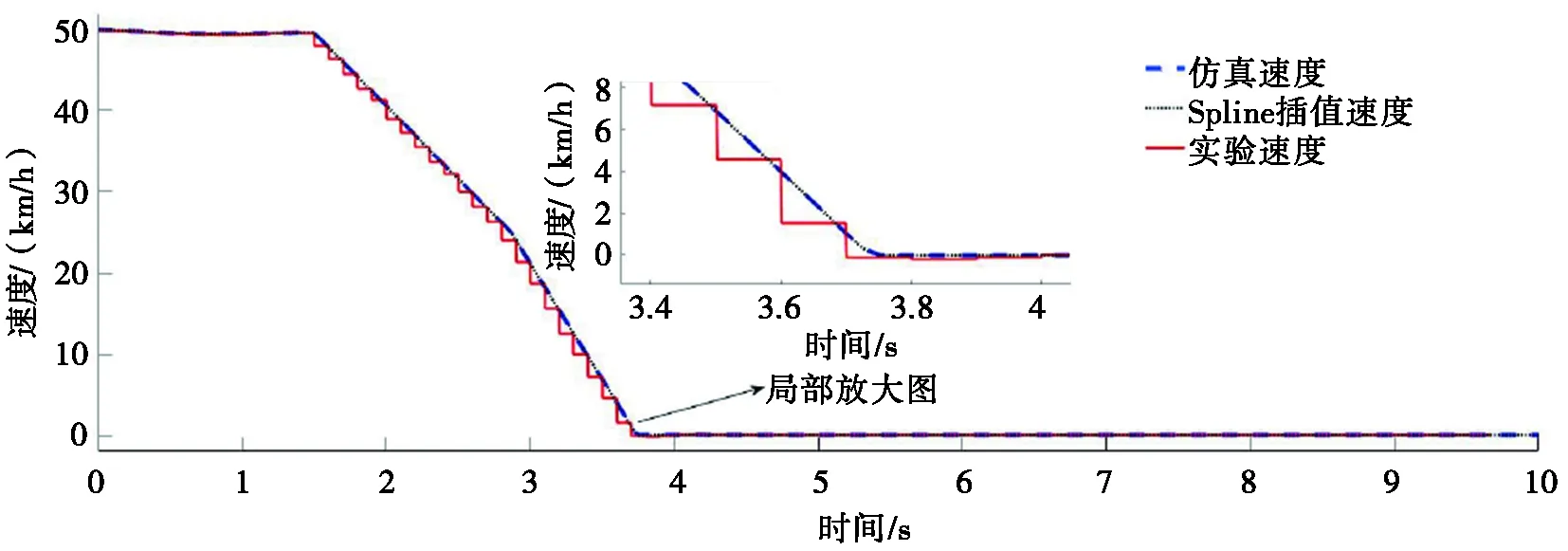
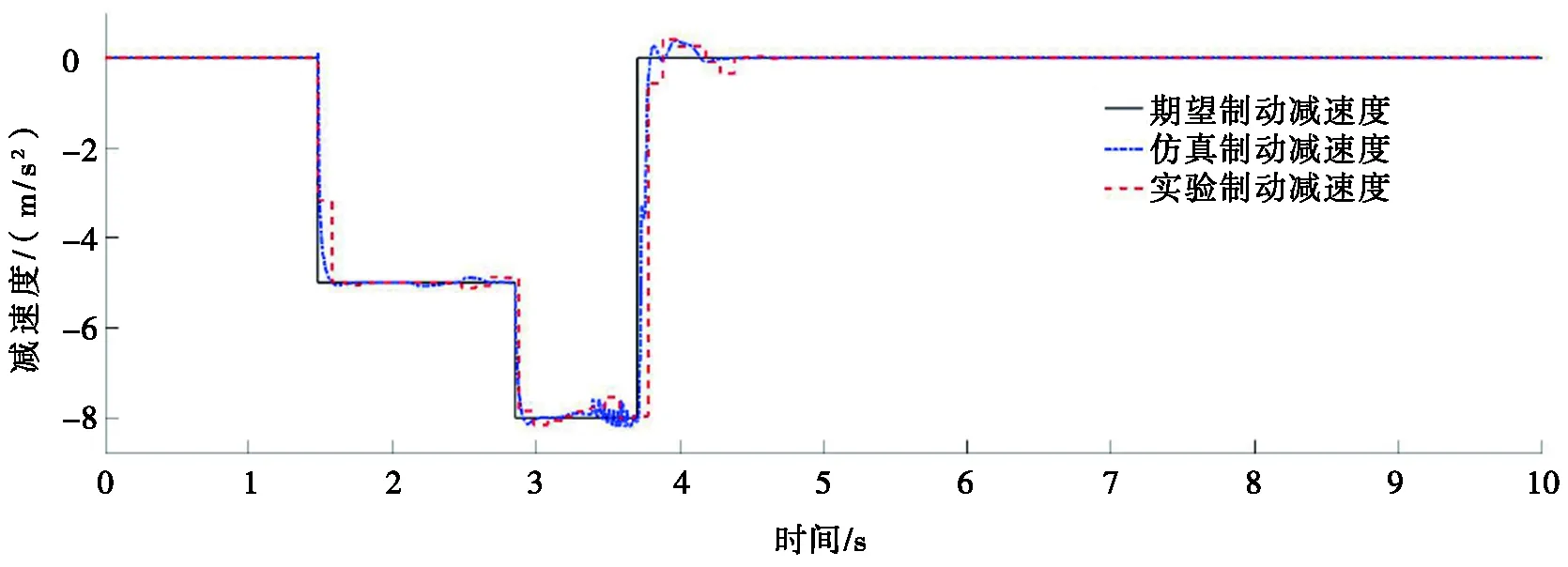
TTC阈值的确定是整个AEB系统的关键,在传统的AEB算法中,往往未对前后两车相对车速进行细致区分,难以适应实际复杂的交通场景,因此本次研究建立考虑相对速度和时间的TTC模型,对城市道路60 km/h及以下车速进行研究,将速度v分为低速(v≤20 km/h)、中速(20 km/h 本文以虚拟试验驱动器(virtual test drive,VTD)和Logitech G27驾驶模拟器构建驾驶员在环(driver in the loop,DIL)模拟驾驶试验台,VTD可搭建逼真的测试场景、丰富的虚拟传感器以及较高的实时性而被行业内广泛使用。由于本文主要针对城市路况进行研究,故在VTD中搭建典型的城市路况AEB测试场景,如图3所示。 图3 驾驶员在环模拟器实验 本次实验以前车静止,本车分别以低速、中速、高速接近前车进行。选取30名不同年龄的驾驶员进行数据采集,首先对被测驾驶员进行简单培训、熟悉驾驶员在环模拟器设备,并进行初步实验测试,然后采集多次驾驶员数据并记录为该驾驶员的数据样本。主要采集车辆行驶过程中两车的相对距离、相对车速、本车加速度等信息。由于驾驶员驾驶习惯、年龄、驾驶熟练程度等多方面因素的影响,模拟器所采集的驾驶行为数据具有一定差异,忽略偶发性与无效数据样本,分析驾驶员在制动过程中的驾驶行为特性,如表2所示。 表2 不同车速下驾驶员行为特性分析 由表2可知:在低速时,由于速度较低,大部分驾驶员仅进行单级制动,而中速与高速时,不同驾驶员的驾驶特性有较大差异,但总体具有速度越快,相应的TTC值以及制动减速度值越大的趋势。进一步分析现有研究中对驾驶员行为特性的研究,并确定最终的TTC阈值以及制动减速度值。 文献[15]选取16名驾驶经验丰富的驾驶员在驾驶模拟器试验台,测得16名驾驶员的平均舒适减速度,其平均值为0.53g,故以0.53g为相对舒适制动减速度值的参照值。文献[16]在国家事故深度调查数据库(NAIS)中抽取100起实际交通事故进行研究,不同制动减速度下的碰撞事故在这100起事故中所占概率如表3所示。 表3 不同制动减速度的碰撞事故占比 结合表2采集的驾驶员数据和表3分析的实际交通事故案例,考虑到车辆以低速行驶时,频繁的制动会影响乘车舒适性,且以较大的制动减速度制动对人体的影响相对较小,故低速时选择全制动,结合采集的驾驶员数据以及对现有研究的分析,分别取表2中各级制动减速度范围下的平均值作为AEB系统的制动减速度值的初选值,并在Simulink中进行仿真试验优化参数,确定最终的制动减速度,汇总于表4。 文献[17]为避免TTC阈值选择过大或过小的问题,通过大量试验总结了5 km/h至80 km/h车速下对应的TTC值,其中15 km/h下的TTC为0.92,表2采集的驾驶员TTC数据区间的平均值为0.95,两者差异较小,因此采用本次实验采集的驾驶员数据作为制动触发阈值。同理计算出30 km/h与50 km/h下TTC阈值区间的平均值作为TTC阈值的初选值,最后在Simulink中进行仿真试验优化参数,确定出最终的制动触发阈值,并汇总于表4。 文献[4]利用正交试验法对驾驶员进行分类,选择90名驾驶员采集相关数据,最后使用聚类分析法拟合出4类驾驶员反应时间与行驶车速之间的关系,见图4中的TTC1~TTC4。取速度为0~17 m/s,每隔0.1 m/s为1个采样点,进而拟合,并求得平均反应时间的函数曲线TTC5。 图4 不同车速下的驾驶员反应时间 结合图4数据进行分析,取低速条件下车速为15 km/h对应的时间,中、高速区间下的车速分别为30 km/h、50 km/h相对应的时间,即分别为1.56 s、1.36 s、1.07 s。将一级制动触发时间阈值与对应平均反应时间之和作为一级预警触发时间,取一、二级预警触发阈值间隔0.8 s,并将预警时间阈值汇总于表4。 表4 预警与制动阈值及减速度值汇总表 由于上层控制器输出的是制动减速度的期望值,故建立车辆逆动力学模型,将期望制动减速度转化为制动主缸压力,并设计相应的控制器对制动主缸压力进行控制。 本次研究设定的路况为水平直线型,且AEB系统开始制动后不存在本车加速前进的状态,故忽略坡道阻力和加速阻力,在此条件下分析车辆受力情况为: (3) 其中:m为自车质量,kg;a为制动减速度,m/s2;Fxb为地面制动力,N;g为重力加速度,m/s2;f为滚动阻力因数;CD为空气阻力因数;A为迎风面积,m;v为行驶车速,km/h。 在车辆制动过程中,当地面制动力Fxb小于附着力F时,制动主缸压力P和制动器制动力为线性相关。设Kb为制动力和制动主缸压力比例系数,即 Fxb=KbP, (4) 其中:P为制动主缸压力,MPa。由上述分析,可以得到制动过程中的期望制动压力Pe: (5) 由于整车动力学模型中存在多变量以及较多非线性关系,传统PID控制器难以精准实现期望的控制效果,且传统PID调参过程主要依靠经验反复试验,比较费时费力,故融合模糊控制理论,建立模糊PID控制器,以达到响应快、超调量与稳态误差较小的控制效果。 将期望制动减速度与实际制动减速度的差值作为系统偏差E,定义偏差变化率为EC。在定义模糊控制规则时,以E与EC作为输入,Kp、Ki、Kd3个参数为输出。在Matlab模糊控制工具箱中使用模糊语言变量组成模糊条件语句,将精确量模糊化为{NL,NM,NS,ZE,PS,PM,PL},对应为{负大,负中,负小,零,正小,正中,正大},将输入输出隶属函数设置为三角形隶属函数,模糊控制规则如表5所示。车辆在实际行驶过程中加速度一般(-8~4 m/s2),故E的取值为[-12,12],因此在Simulink模糊工具箱中将E和EC的论域映射为[-6,6][18],同时通过仿真实验最终将Kp、Ki、Kd3个参数的论域分别设定为[0,3],[30,60],[0,0.04]。 表5 模糊PID规则表 在Matlab中使用模糊工具箱搭建模糊PID控制器,如图5所示,其语言规则为:If (Eis NL) and (ECis NL) then (Kpis PL) (Kiis NL) (Kdis PS),模糊推理使用Mamdani法,采用面积中心发清晰化[19]。 图5 模糊PID控制器结构 为了验证PID控制与模糊PID控制效果,采用试凑法进行反复调试,最终确定PID控制器的参数,其中Kp=3、Ki=45、Kd=0.01,最后以30 km/h的车速对PID控制器与模糊PID控制器在期望减速度的跟随效果方面进行验证,测试结果如图6所示。由图6可以看出:PID控制超调量最大值为1 m/s2,而模糊PID超调量最大值仅为0.32 m/s2,该超调量的大小直接影响车辆刹停时的俯仰运动程度,超调量小则可以一定程度上提高乘车舒适性。另一方面,模糊PID控制可避免PID控制在5.2 s时产生约14.3%的跟踪误差。因此相比于PID控制,该模糊PID控制器具备更好的控制效果,在下一步的仿真和实验中将采用模糊PID控制器进行验证。 图6 不同控制器下制动减速度变化曲线 为测试AEB系统控制策略的有效性,结合C-NCAP与E-NCAP关于AEB的测试方式,采取CCRs(car-to-car rear stationary)前方静止车辆追尾测试。在CarSim中建立仿真场景,路面附着系数为0.85,道路设置为水平直线型道路,设定两车初始相对距离为40 m,将本车分别以15 km/h、30 km/h、50 km/h的车速进行测试。测试结果如图7~图9所示。 (a) 距离、速度与时间曲线 (b) 减速度与时间曲线 (c) 预警等级与时间曲线 15 km/h工况下,在仿真时间为7.14 s时,TTC值达到一级预警信号触发阈值,随后二级预警与制动触发时间分别为7.94 s、8.70 s,符合对应阈值的设定,最终刹停时两车间距约2.15 m。 (a) 距离、速度与时间曲线 (b) 减速度与时间曲线 (c) 预警等级与时间曲线 30 km/h工况下,在仿真时间为2.37 s时TTC值达到一级预警信号触发阈值,随后二级预警与一、二级制动触发时间分别为3.17 s、3.73 s、4.37 s,符合对应阈值的设定,最终刹停时两车间距约2.20 m。 图(a) 距离、速度与时间曲线 图(b) 减速度与时间曲线 图(c) 预警等级与时间曲线 50 km/h工况下,在仿真时间为0.41 s时TTC值达到一级预警信号触发阈值,随后二级预警与一、二级制动触发时间分别为1.21 s、1.48 s、2.86 s,符合对应阈值的设定,最终刹停时两车间距约2.15 m。 仿真结果表明: 该控制策略在车速为15 km/h、30 km/h、50 km/h的速度下预警与制动均能有效触发,并保障了车辆的安全性,制动时实际制动减速度与期望制动减速度基本吻合,且在刹停后两车相对距离为2.15 m。与文献[14]和文献[20]对比,本文所设计的AEB系统在不同车速下车辆刹停后均能保持在2.15 m左右的安全距离,且制动过程中首先采取相对较小的制动减速度,有利于减小驾驶员因突然制动而产生不适。 在完成软件层的模型在环(model in the loop,MIL)测试之后,基于智能汽车“V”流程开发模式,结合Matlab/Simulink自带的CAN Communication模块,并通过CAN通讯以及以太网通讯技术进行数据传输,利用自动代码生成技术,结合Kvaser Leaf Light v2 USB 转CAN 等设备,通过dSPACE平台的MicroAutoBox与相应的仿真板卡进行测试,最后搭建基于无人驾驶线控底盘平台进行半实物实验验证。无人驾驶线控底盘测试平台如图10所示。 图10 无人驾驶线控底盘测试平台 结合底盘平台的相关参数对控制策略进行适配,以仿真测试中50 km/h的车速在底盘测试台架上进行实验验证,结果如图11~图14所示。 图11 相对距离变化曲线 图12 相对速度变化曲线 图13 FCW预警信号变化曲线 图14 制动减速度值变化曲线 从图11和图12可以看出:实验采集的相对距离与相对速度曲线由于采样频率以及惯性响应延迟等原因,存在一定的“锯齿感”,采用Spline插值法对实验数据进行拟合,拟合数据与仿真数据保持一致。从图13可以看出: FCW预警信号可以有效的触发,并及时地响应。从图14可以看出: 实验过程中的制动减速度可较好地跟随期望制动减速度。综上所述,通过该底盘平台,对控制策略在自动代码生成、CAN总线通讯以及执行器的响应等方面进行了实验,进一步验证了控制策略的有效性。 (1)利用驾驶员在环模拟驾驶实验有效地采集了驾驶员数据,并通过设计模糊PID控制器实现了对期望减速度较好的跟踪,搭建了考虑驾驶行为特性的AEB系统控制策略,有效地避免了AEB系统过早或过晚介入的问题。 (2)参考C-NCAP与E-NCAP关于AEB系统的测试要求,设计了前车静止场景的测试方案,通过CarSim与Matlab/Simulink的联合仿真测试与基于无人驾驶线控底盘平台的半实物实验,充分验证了AEB系统的有效性。2.2 基于驾驶员在环模拟器的驾驶行为分析


2.3 制动减速度的确定

2.4 TTC阈值的确定
3 下层控制器的建立
3.1 制动压力控制
3.2 模糊PID控制器
4 联合仿真仿真测试


5 基于无人驾驶线控底盘平台的半实物实验验证


6 结论
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
汽车维护与修理(2018年1期)2018-04-04 01:13:22
公民与法治(2016年4期)2016-05-17 04:09:26
通信电源技术(2016年1期)2016-04-16 04:57:26
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33