
基于STM32的全地形六足机器人系统设计
2023-09-15 13:05何玉鑫王瀚翔包世杰
无线互联科技 2023年13期
何玉鑫,王瀚翔,包世杰
(南京航空航天大学金城学院,江苏 南京 211156)
0 引言
国内救援机器人研究相对晚起,但已有不少进展。重点研究包括蛇形机器人,凭借多关节、高灵活性适应各种地形;履带式机器人具备强大的机动性,适应复杂环境;轮式机器人速度快、稳定。然而,救援机器人仍存在:造价昂贵,控制复杂,搭载视觉探测系统和机械臂二次破坏等问题。未来研究应侧重于降低成本,简化控制系统,减小体积和重量,以适应复杂环境。
1 总体设计方案
六足机器人母体平台系统设计,如图1所示。本设计主要分为硬件和软件两大部分:硬件主要包括硬件结构设计和结构强度优化;软件部分主要包括仿生原理、六足步态算法、上位机检测和App控制。
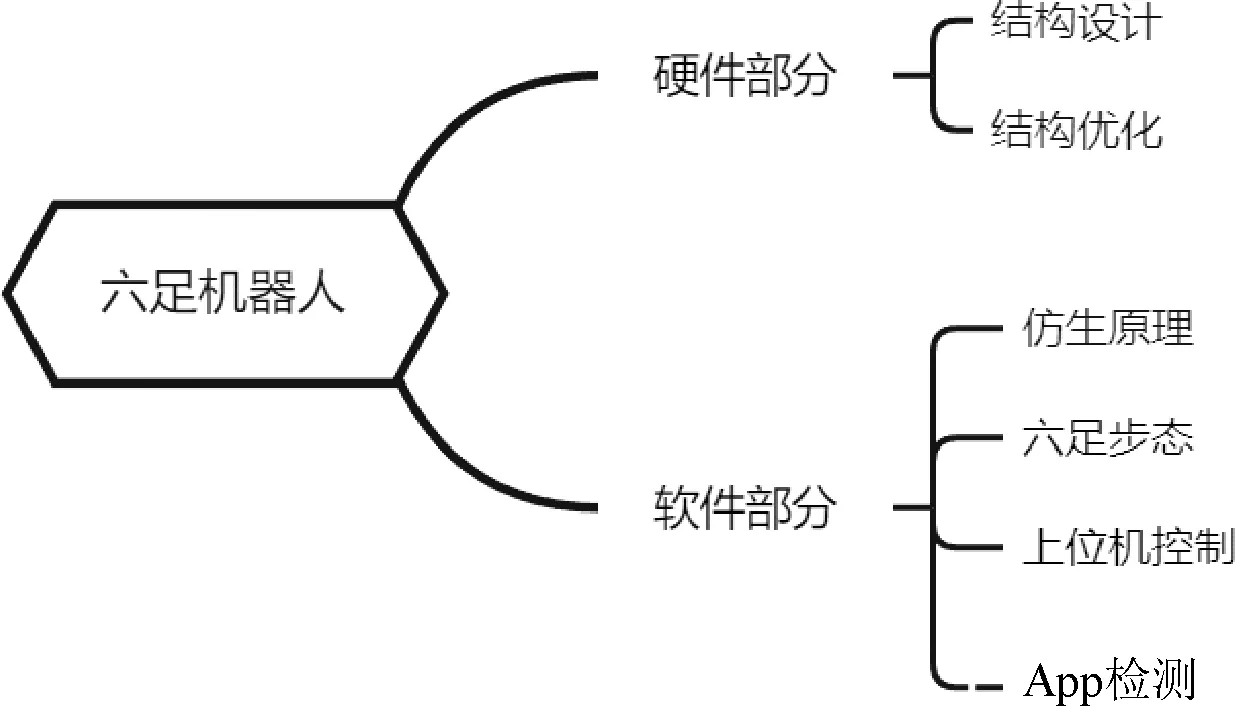
图1 六足母体平台整体设计
1.1 总体硬件结构
对于一个六足机器人搭建,至少需要以下6部分:18个舵机、肢体结构、航模电池、18路驱动控制板等。舵机控制板是机器人的中枢神经,负责协调动作;机器人主控则是大脑,负责处理外界信息、指挥;机器人扩展的传感器是感官系统,负责接收信息。为实现机器人智能化,需添加主控并添加各种传感器模块,形成机器人智能化框架。因此,在搭建六足机器人母体平台前,需先配好硬件。
1.2 舵机方面
本系统采用数字舵机驱动六足机器人,因为其需要精确的数据控制和信号收发。数字舵机由伺服电机和减速箱组成,拥有微处理器控制电路,可对信号进行预处理,提高控制精度。其伺服电机比直流电机更稳定且能产生固定的绝对角位移。MG90S数字舵机是目前性价比最好的数字金属齿轮舵机,拉力仅次于14 kg标准舵机。考虑到舵机性能、六足机器人最大扭矩需求和性价比,本系统选择了MG90S数字舵机。
1.3 全身机械结构
市场上机架结构材料主要有玻璃纤维、铝合金、工程塑料和碳纤维。玻璃纤维机架质量更轻,刚度更高,适合轻量化应用;铝合金成本低、轻量化,但强度不高;工程塑料轻量化,但对火和溶剂敏感,力学性能一般;碳纤维成本高,适合高性能应用。因此,本次选材设计采用成本较低、性能较好的玻璃纤维方案,可以支撑六足机器人的机械足和底盘硬件。
1.4 能源驱动方面
鉴于六足机器人需要使用18路舵机来控制姿态动作,因此在选择电源时,本系统选择使用两块2 S 220 m 30C规格的航模锂电池作为六足机器人母体的能源供应,以确保可以提供足够的电压和电流带动六足机器人的18个MG90S舵机以及主控板。
1.5 主控板方面
现主流32位单片机多采用ARM Cortex架构,具有高性能、低功耗、大内存和丰富外设等优点,可满足本次设计要求。故本系统选用STM32F103C8T6单片机最小系统板,其具备足够算力、基本功能、小体积,以确保主控板能容纳其他部件。
1.6 驱动扩展版
对于六足机器人来说,每条机械足需要3个舵机,六条机械足至少需要18个舵机。而选择的STM32F103C8T6单片机最小系统板没有足够的IO接口来满足至少18路舵机的控制,所以本系统选择24路驱动扩展板。该舵机扩展版拥有足够的IO接口和拓展配置,以确保有足够的扩展接口驱动六足机器人母体平台。
2 六足机器人软件设计
2.1 六足机器人系统总体设计
六足机器人系统软件设计流程,如图2所示。在不同的外部环境中采集数据和外界参数,经过数据的处理和分析,利用程序及三角步态算法、转向步态算法、波浪步态等算法,确保六足机器人在崎岖不平的道路中能够保持步态稳定并翻越障碍物,以获得在多种复杂环境中拥有较强的生存、越障能力。
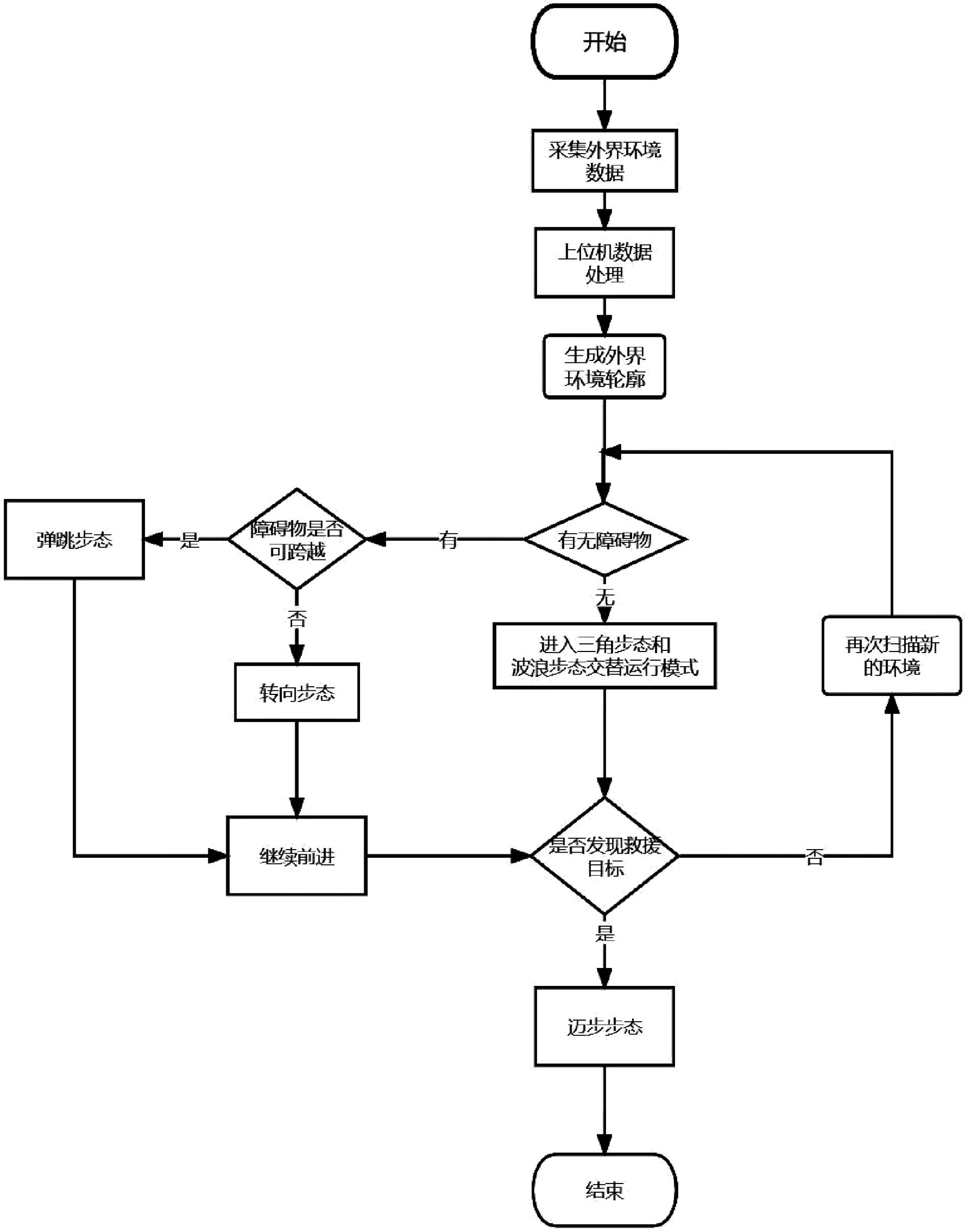
图2 六足机器人系统软件设计流程
2.2 仿生原理分析
本系统采用仿生式六足机器人,又称蜘蛛机器人,它是一种多足机器人。设计灵感来源于昆虫的运动原理,足由基节、转节、腿节、胫节、跗节和前跗节等部分构成。昆虫的行走方式是以三条腿为一组进行的,即一侧的前、后足与另一侧的中足为一组,形成三角形支架结构。这种行走方式使昆虫具有很强的实用性和稳定性。本系统采用六个三自由度机械臂分别控制每条足,从而控制六足机器人的前进、后退、转向等动作。
2.3 三角步态介绍
机器人的步态是按照一定顺序和轨迹运动的过程,实现机器人步行。腿根据规律,轮番完成“提-摆-放”动作,从而使机器人稳定移动。步态周期是所有腿轮番完成一次动作所花费的时间。占地系数是每条腿接触地面时间和步态周期的比值。当占地系数为0.5时,机器人用两组腿交替摆动,称为小跑步态。步幅是重心在步态周期中的平移距离,会影响机器人的速度和稳定性。静态稳定性要求机器人重心投影始终在三条腿的立足点构成的三角形内。六足机器人采用三角步态,通过两个三角形支架结构交替前行,实现步态。在此步态下,髋关节在水平和垂直方向上运动,容易保持稳定,因此被广泛应用。
本系统六足机器人使用的步态如下:(1)三角步态。六足机器人用三支撑腿保持稳定,另三条腿交替前移,形成三角形。移动腿与支撑腿形成新三角形。简单、稳定,适合平地行走。(2)波浪步态。六足机器人用一支撑腿,其余五条腿按相间顺序交替向前移动。移动腿承重,支撑腿不负重。先将一支撑腿前移,移动腿落地后,支撑腿离地。另两腿前移成为新支撑腿和新移动腿,重复直到到达目标位置。(3)转向步态。改变六足机器人行进方向,前后腿分别向相反方向移动,形成“V”字。先移动一支撑腿,剩余两腿左右移动,另两腿前移成为支撑腿和新移动腿。(4)螃蟹步态。用于横向移动,前后腿向同一方向移动,形成螃蟹姿势。向左时,前腿左移,后腿右移;向右时,前腿右移,后腿左移。适用于狭窄空间内。(5)迈步步态。大步幅行走,交替使用支撑腿,形成两相邻三角形。移动腿落地后,成为新支撑腿。步幅大,速度受影响。(6)弹跳步态。跳跃行走方式,前三腿向前移动,同时跳跃。重心下落,落地后后三腿为支撑腿,前三腿为移动腿。速度快,能耗大,适用于快速移动场景。
3 六足机器人调试过程
六足机器人母体平台由于需要步态调试与算法优化,因此需要使用上位机进行步态调试。本系统采用一款GitHub上开源的舵机控制上位机,可以分别编写各个舵机的参数,并将参数保存并上传。
为了方便六足机器人的控制,本系统选基于Android架构搭建一款基于Wi-Fi连接的手机App,并将上位机调试的参数导入其中,以实现对六足机器人的步态和方向前进控制。
由于之前黑色大体积的六足机器人在加装,机械臂、激光雷达、摄像头后显得较为臃肿,无法较好地展现六足步态。因此本系统重新构建了一个小型六足机器人,以便更好地展示六足步态和全地形侦察姿态。六足机器人步态展示及全地形侦察,如图3所示。

图3 六足机器人步态展示及全地形侦察
4 结语
本文描述了一种基于STM32微控制器的全地形六足机器人系统。该机器人系统能够在各种地形上行走,包括平坦的地面、石头、沙滩等。六足机器人的设计旨在提高稳定性、机动性和适应性。总之,基于STM32的全地形六足机器人系统具有高度灵活的运动性能和较强的适应性,可在各种复杂地形上行走。这种机器人系统在探险、救援和科学研究等领域具有广泛的应用前景。
猜你喜欢
保健医苑(2023年2期)2023-03-15
自动化学报(2019年6期)2019-07-23
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
舰船科学技术(2015年8期)2015-02-27
发明与创新(2015年33期)2015-02-27
