水下小目标合成孔径声呐层析成像技术研究
2023-09-14 01:00:18陈敬军曾赛
声学技术 2023年4期
陈敬军,曾赛
(1.海军装备部驻上海地区第七军事代表室,上海 201108;2.上海船舶电子设备研究所,上海 201108)
0 引 言
水雷是现代海战中舰艇面临的主要水下威胁之一,主要包括锚雷、沉底雷、掩埋雷等类型。提高对水雷的探测识别能力一直是浅海或浅水环境下舰艇反水雷作战的重要需求之一。由于水介质对于电磁信号的吸收较强,使得声信号成为水雷目标探测的首选手段。目前,水雷探测识别依然面临许多挑战,存在许多技术难点。一方面,水雷具有目标尺度小、目标强度弱、目标散射声场空间指向不均匀性等特性,远距离小目标检测困难,需要解决在远距离上提高目标检测概率的问题。另一方面,水雷所处的水下环境干扰小目标多,即使同一目标从不同方位观测时得到的结果也可能差异较大,水雷容易与自然目标或民用目标混淆,提高水雷识别性能需要解决可疑威胁小目标的识别确认问题。
提供更加精确的目标回波图像是显著提高图像探测声呐识别性能的重要手段。图像声呐的分辨率是衡量图像声呐性能优劣的重要技术指标,一般分为距离分辨率和方位分辨率。距离分辨率是指声波传播方向的分辨率,方位分辨率是指垂直于声传播方向的分辨率。距离分辨率由信号的脉冲宽度或者带宽决定,可以通过增加信号的带宽来提高距离分辨率。方位分辨率与声呐基阵的大小有关,在实际工程应用中,利用增加基阵的大小来提高方位分辨率的方法受到了成本、安装空间等现实条件的制约。采用合成孔径的方法是提高声呐方位分辨率的一种可行方案,并已经在工程应用中得到检验。与单波束声呐、多波束声呐和侧扫声呐相比,合成孔径声呐在水下目标探测成像和识别方面具有显著的优势[1]。
根据成像的原理,可以将合成孔径声呐分为条带合成孔径声呐和干涉合成孔径声呐,其中干涉合成声呐比条带合成孔径声呐多一条接收阵,其结构更为复杂。与多波束声呐和侧扫声呐类似,无论是条带合成孔径声呐还是干涉合成孔径声呐,其运动轨迹均为直线,对于水中观测场景中的待观察目标而言,直线轨迹决定了声呐波束只能在有限角度内观测到目标。从目标特性的角度分析,对于各向异性目标,不同方位的散射特性是不同的,有限的观测角带来了目标信息缺失的问题[2],最终会影响图像声呐的探测识别性能的提高。
层析(Tomography)成像技术是一种波数谱分析方法,其本质是通过圆形测量孔径获得关于目标的全方位散射信息,然后基于全方位散射信息反演重建得到目标的外形轮廓(声学层析)或内部精细结构(医学层析)[3],层析成像技术已经成功应用于多个领域[4-7]。利用层析手段获得的目标回波信号波数结构呈现“圆台”结构。圆台中空结构的大小与发射信号的带宽相关,当发射信号带宽较大时,圆台中空结构小,波数谱包含的信息量大[8]。“圆台”形的三维波数谱结构使得层析成像技术可以获得目标图像的高度向分辨率,有利于提高目标成像质量,提高目标识别概率[9]。
将合成孔径体制与层析手段相结合,通过构造观测场景的全方位观察态势,能够克服各向异性目标不同方位散射特性各异的困难,获得全方位散射信息,使得成像矩阵的可解性更强。从傅里叶成像的角度而言,层析合成孔径扩展了波束谱域的有效带宽,从而能够达到或者接近图像理论分辨率的极限,而且具备了三维成像能力[9]。本文研究了水下目标层析成像技术,首先系统分析了现有成像技术手段的技术特征,并与层析合成孔径技术手段进行了比较。其次,介绍了层析反演的基本原理,进行了层析成像的仿真,并通过水池试验和湖上试验验证了层析成像技术的可行性。
1 层析合成孔径声呐系统理论模型
1.1 层析合成孔径声呐分辨率模型
本节通过与多波束声呐、条带合成孔径声呐比较,分析层析合成孔径声呐成像分辨率特性。多波束声呐采用实孔径成像,慢时间维(方位向)分辨率δx和快时间维(距离向)分辨率δy分别为[10]
式中:Da为声呐沿方位向的孔径,λ为发射信号中心频率对应的波长,R0为径向距离,c为水中声速,B为发射信号带宽。式(1)表明多波束声呐的快时间维分辨率δy取决于主动发射信号的频率带宽,多波束声呐的慢时间维成像分辨率δx随着距离的增大而变差。
条带合成孔经声呐慢时间维分辨率δx和快时间维分辨率δy分别为
式中:方位向分辨率公式分母中的2倍是由双程传播产生的。波束指向角可以近似为θ0≈λ/Da(3 dB 角为0.886λ/Da),条带合成孔径的长度为Lsa=R0θ0=R0λ/Da,将合成孔径长度代入式(2),则有δx=Da/2。这说明条带合成孔径声呐的快时间维分辨率取决于主动发射信号的频率带宽,慢时间维分辨率与发射阵物理孔径相关。若把合成孔径角代入式(2),则有这说明条带合成孔径声呐慢时间维分辨率由中心频率波长和视角确定。
层析合成孔径声呐的几何模型如图1所示。以目标中心为圆心建立直角坐标系,图1中的O为观测目标,S为围绕目标做圆周运动的阵元,当垂直阵做圆周运动时,S阵元形成的观测平面z=H,Rs为观测平面的半径,参考点与S阵元之间的距离为R0。实际声呐系统需要考虑工作频率带宽的影响,现以位于中心点O的点目标为例分析给定带宽条件下水声层析成像的分辨率。设主动发射采用宽带信号,中心频率为f0、带宽为B,则点目标的空间频率波数谱为
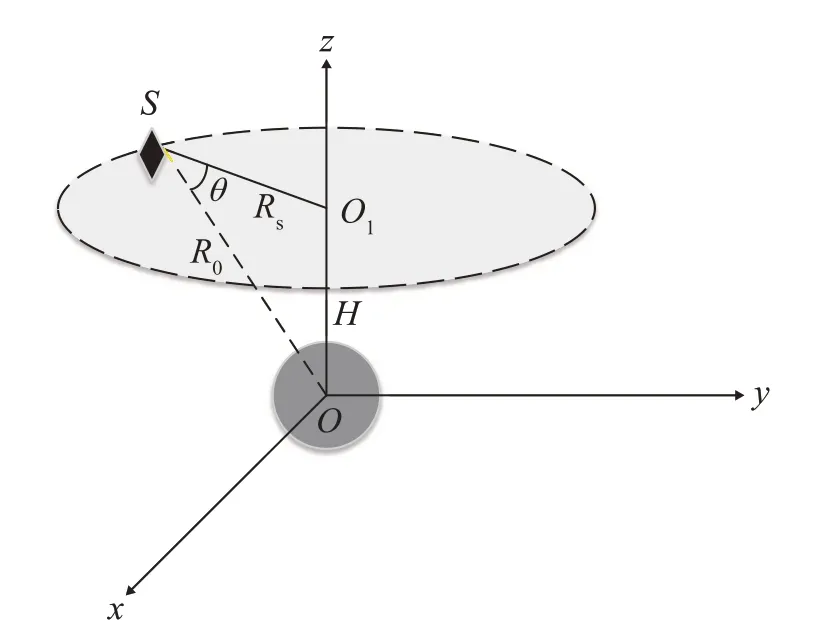
图1 层析合成孔径声呐系统成像几何模型Fig.1 Imaging geometry model of the tomography-synthetic aperture sonar system
对式(3)所示波数谱进行二维傅里叶变换并引入极坐标变换,即可以得到点目标的成像结果。由此可以得到层析合成孔径声呐成像系统点扩散函数:
式(5)为发射信号为宽带信号时层析合成孔径声呐的分辨率表达式。式(5)表明,水声层析成像系统的慢时间维分辨率与快时间维分辨率基本相当,慢时间维和快时间维分辨率由工作带宽决定,与距离无关。当发射信号为单频窄带时,分辨率为δy=π/(2Kmaxsinβ),其中β为波数圆锥角的一半,Kmax为单频信号波数。由此可以看出,发射信号为单频信号时,分辨率由频率决定,频率越大分辨率越高。条带合成孔径的慢时间维成像分辨率仅取决于声呐实孔径长度Da,还不能达到宽带发射条件下的快时间维成像分辨能力,因此层析合成孔径声呐的分辨率优于多波束声呐和条带合成孔径声呐。
1.2 层析成像理论
层析合成孔径声呐成像是通过测量空间目标图像的波数谱或空间频率谱(与目标图像互为傅里叶变换对)数据实现成像的,其理论基础是空域傅里叶变换[11-15]。图2 给出了水声层析成像原理的示意图。假设被测目标分布在两维平面内,以被测成像空间区域的中心O为原点建立平面直角坐标系xOy,声呐围绕中心O做圆周运动,声呐到中心O的距离为R0,声波入射方向与x轴的夹角为θ。

图2 层析成像原理示意图Fig.2 Schematic diagram of the tomography imaging principle
当声呐与被测目标之间的距离和工作频率波长之间满足远场条件时,可以将发射和接收信号用平面波近似。声呐在θ方位角采集的回波信号可以表述为
式中:q(x,y)为待重建目标外形及其内部结构特征反射系数分布,p0(t)是声呐主动发射信号,c是水中声速,s表示相对延迟距离,是散射点矢量r(x,y)沿θ方向的投影距离,计算公式为:s=xcosθ+ysinθ。对pθ(t)做关于时间变量t的一维傅里叶变换,可以得到一维时域回波信号频率谱:
其中:Q0(ω)为主动发射信号频率谱,波数定义为k=ω/c。对q(x,y)关于空间变量x和y做二维傅里叶变换,可以得到空间波数谱:
令kx=2kcosθ、ky=2ksinθ,代入式(8),并与式(7)比较,可以得到:
式(9)建立了测量的一维时域回波信号频率谱与被测目标或被测区域反射系数q(x,y)的二维空间波数谱的数学关系,从而可以获得全方位角的空间波数谱。对空间波数谱进行二维傅里叶逆变换可以得到被测目标或被测区域反射系数的成像结果,即:
2 仿真试验
待测目标由40 个亮点组成,这些亮点组成了大小为1 m×1 m 的正方形,待测目标的几何态势如图3 所示。目标反射系数设为1,发射信号为线性调频信号,中心频率为100 kHz,带宽为30 kHz,发射脉宽为10 ms,层析成像的测量半径为30 m。
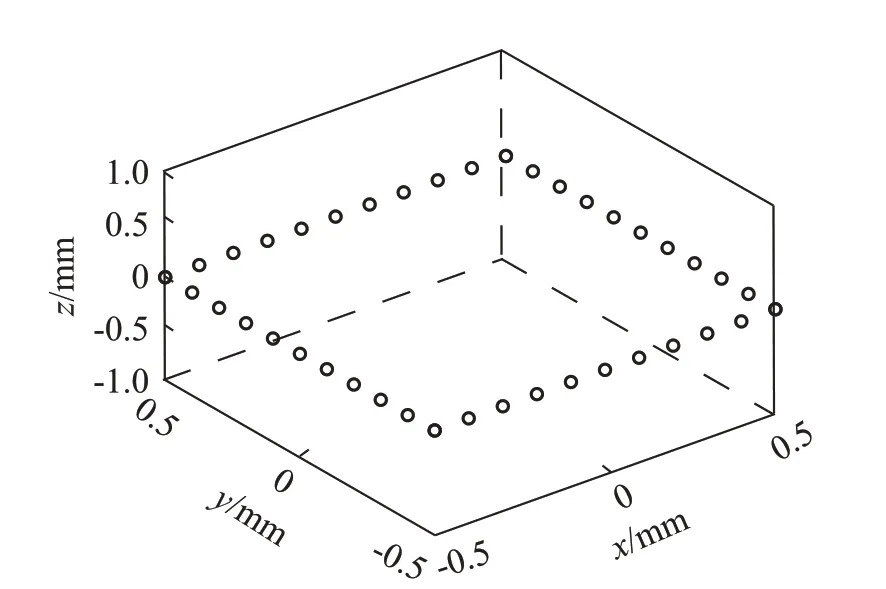
图3 待成像目标示意图Fig.3 Diagram of the object to be imaged
图4为阵元回波信号的角度-时间谱,其中横轴为角度,纵轴为距离向采样点。从图4 中可以看出,层析合成孔径声呐获得的目标回波的时间-角度图呈现正弦曲线的样式。图5 为基于1.2 小节成像理论对平面点目标的重建效果图。从图5中的重建效果可以看出,层析合成孔径声呐能够对物体进行精确成像。
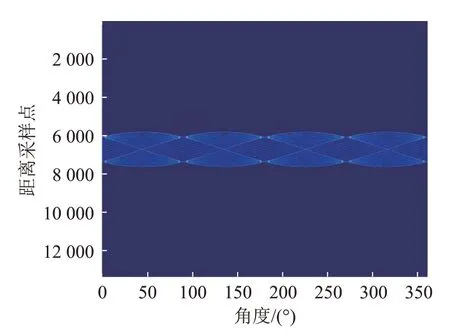
图4 目标回波角度-时间谱Fig.4 Target echo signal structure
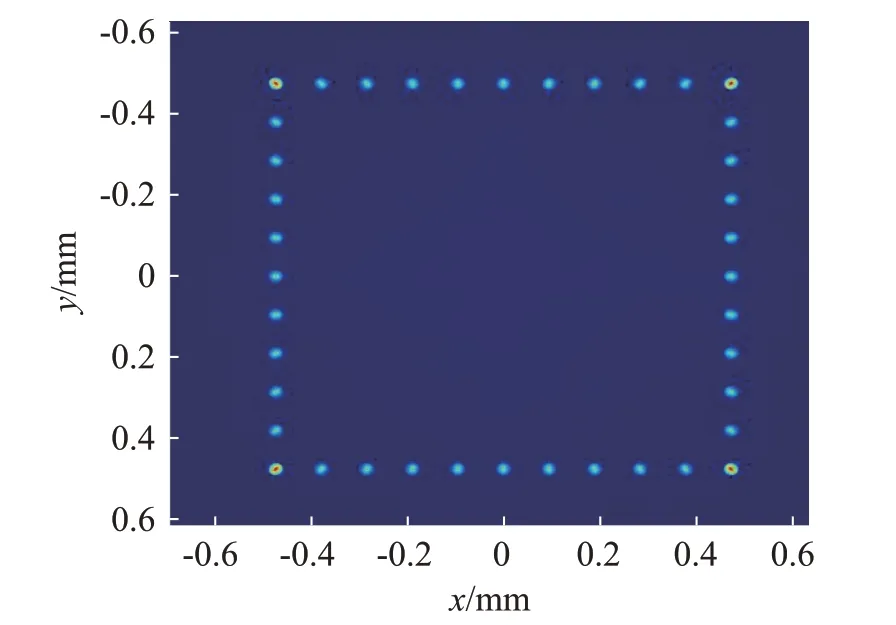
图5 目标二维成像示意图Fig.5 A schematic representation of the target in twodimensional imaging
3 试验验证
3.1 水池试验验证
在某消声水池进行了层析合成孔径声呐成像技术的验证试验。试验测试态势示意图如图6 所示。待测目标为Benckmark潜艇模型,按照1∶20比例缩比制作,高度小于35 cm,长度约为2 m,为双层加肋结构。试验用Benckmark目标,如图7所示。待测目标放置在一个转台上进行周向旋转,发射接收阵在另一个转台上,发射阵与目标之间的距离为10 m,发射阵在水下的深度为3 m。发射阵发射160 kHz的单频信号,接收阵为“L”形。

图6 消声水池试验测试态势示意图Fig.6 Test situation diagram in anechoic pool

图7 试验用Benchmark目标Fig.7 Benchmark target used for the experiment
试验中接收阵元回波结构如图8所示,横坐标为角度,纵坐标为距离采样点。从图8 中可以看出,随着目标的转动,目标回波呈现正弦曲线结构。图9 为待测目标的水声层析成像结果。从图9中可以看出缩比模型的上层结构、内部肋板以及外形轮廓结构均得到清晰地重建,与真实的结构吻合较好,验证了本文所提层析重建方法的有效性。

图8 Benchmark目标回波角度-时间谱Fig.8 Benchmark target echo structure

图9 Benchmark目标图像重建结果Fig.9 Reconstruction result of the Benchmark target image
3.2 湖上试验验证
本文对人工布放的目标进行了层析合成孔径成像的湖上验证试验,试验目标如图10 所示。试验区域的水深为12 m。发射阵发射线性调频信号,中心频率为100 kHz,带宽为30 kHz,信号重复周期为150 ms。采用多子阵接收目标回波,其中发射阵和接收阵通过固定机构与运动平台刚性连接运动。发射接收阵的运动载体为水面双体船。试验中,水面双体船搭载发射接收换能器绕目标做圆周运动,利用GPS定位双体船的轨迹。

图10 湖上试验待测目标Fig.10 The target to be tested in lake
图11为待测目标回波的角度-时间谱。图12为利用本文所述方法对试验目标进行层析成像的结果。从图12 中可以看出,利用获得的目标回波信号能够重建目标的二维外形轮廓,且目标的形状轮廓无畸变、无阴影,有利于目标的正确识别。

图11 试验目标回波角度-时间谱Fig.11 Echo structure of the test target
4 结 论
水下目标或场景的声成像对于目标的探测与识别具有重要的意义。本文研究了基于层析合成孔径的水下目标成像方法,理论分析了层析合成孔径声呐的分辨率以及层析成像的机制,并通过仿真试验、水池试验和湖上试验验证了层析合成孔径声呐对水下目标的层析成像效果。结果表明,本文所提方法能够在一定距离上对水下目标图像进行精确重建,有利于正确识别水下目标。本文所提方法可以显著提高水下小目标的识别正确率,对于水下目标的探测与识别研究具有重要应用价值,后续将结合具体工程应用继续深入研究。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
潍坊学院学报(2021年2期)2021-07-22 07:59:24
北京大学学报(自然科学版)(2021年3期)2021-07-16 07:13:40
矿产勘查(2020年5期)2020-12-25 02:38:52
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
电脑知识与技术(2019年13期)2019-07-08 02:23:41
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:23
声学技术(2014年1期)2014-06-21 06:56:32
雷达学报(2014年4期)2014-04-23 07:43:22