道路坡度识别的混合动力客车模式切换控制策略
2023-09-14 12:02高爱云范卫峰付主木
重庆理工大学学报(自然科学) 2023年8期
杨 杰,高爱云,范卫峰,付主木,张 玮
(1.河南科技大学 车辆与交通工程学院, 河南 洛阳 471003;2.河南科技大学 信息工程学院, 河南 洛阳 471023)
0 引言
混合动力汽车2个动力源(发动机和电机)之间的切换过程直接影响车辆的动力性和经济性。国内外很多学者都针对混合动力驱动模式控制进行了大量的研究[1-4]。然而,随着汽车智能化的深入发展,汽车的实际行驶环境也成为了关注的热点。尹安东等[5]采用学习向量量化(LVQ)神经网络识别车辆实时工况,制定一种基于工况识别的整车控制策略,通过对实时工况的识别有效提高了HEV的燃油经济性。陈飞等[6]利用智能交通系统(ITS)和专用短程通信技术(DSRC)获取汽车行驶工况信息,提出了一种网联混合动力汽车分层能量控制方法,大大提高了整车的燃油经济性。钱立军等[7]为实现混合动力汽车的实时最优能量管理,提出一种基于智能网联的分层能量管理控制方法,能够实时提高汽车的燃油经济性和动力性。上述针对HEV的研究都是基于平坦路面上的行驶工况,而在实际行驶道路中,坡度是真实存在的,也是不可忽略的,同时道路坡度对车辆的动力性造成的影响也是不容忽视的。
目前,道路坡度的实时识别也成为研究中的难点之一[8]。针对道路实时坡度识别的问题,国内外学者已经做了大量的研究,Jo 等[9-10]提出了一种利用GPS与车载传感器信息融合、与EKF算法结合的道路坡度车辆位置估算算法,但对道路坡度的识别精度有待提高。付翔等[11]分析目前不同坡度识别算法的优劣,分别建立基于动力学、考虑加速度传感信息坡度识别模型、基于GPS的坡度识别模型,并将3种模型进行联合滤波估计,大大提高了车辆坡道识别的精度和鲁棒性。
综上所述,针对实际的道路坡度对汽车动力性的影响,尤其是汽车在上坡行驶过程可能存在动力不足的问题,提出一种基于道路坡度识别的混合动力客车(HEB)主动模式切换控制策略。只考虑汽车上坡过程中的模式切换控制,不考虑下坡过程。“主动”是指汽车在上坡行驶过程中混合动力系统未来时刻所需的转矩是可以提前被计算的,对混合动力系统而言,针对模式状态发生变化,尤其是针对发动机介入时的模式状态变化时,整车提前发出模式切换指令,关键零部件提前进入准备状态,如发动机、离合器、电机等。以洛阳市某一旅游客车特定山路旅游路线为例,应用纵向动力学道路识别算法进行道路坡度识别,BP神经网络算法对未来时域内行驶车速进行预测,在控制时域内利用汽车动力学公式求得预测时间内的需求转矩,根据需求转矩以及SOC值进行模式状态确定,使汽车有模式状态变化时提前完成模式切换,避免汽车在上坡过程中动力不足问题的发生。
1 HEB系统建模和整车参数
HEB是一种为旅游而设计和装备的客车。这种车辆的行驶工况比较特殊,每天都要在特定旅游路线往返,经常上下坡,以洛阳市某一旅游客车为例,其外形如图1所示,其整车和动力零部件参数如表1所示。

表1 整车和动力零部件参数

表2 基于BP神经网络预测车速的均方根误差

图1 整车外形
2 道路工况预测
2.1 基于纵向动力学的道路坡度识别算法
车辆在实际行驶过程中需要考虑现实的道路环境等因素,这就使得实际坡度与识别坡度存在相对较大的误差。因此拟采用一种基于纵向动力学的坡度识别算法。

(1)
式中:ac为识别加速度,V为当前车速,Tm为动力源转矩,ig为变速器速比,io为主减速器速比,ηt为系统动力传递的效率,r为车轮滚动半径,m为汽车整备质量,CD为风阻系数,A为迎风面积,∂为坡度识别算法中的识别坡度。
车辆的实际加速度为

(2)
式中:ar为实际加速度,vk和vk-1分别为当前时刻和上一时刻的速度,Δt为时间,θ为道路的实际坡度。
根据式(3)不同加速度关系对应不同的坡度关系,由∂和θ根据式(1)和式(2)分别计算识别加速度ac和实际加速度ar
(3)
因此,可以根据对ac和ar的关系进行比较,从而判断出∂和θ的关系,在每一个坡度识别时间内,通过比较ac和ar的关系,对识别坡度进行归正,得

(4)
式中:∂ck和∂ck-1分别为当前时刻和上一时刻的识别坡度,Δ∂为修正系数。
根据仿真结果,Δ∂取1.7°,识别坡度与实际坡度的误差为最小。
2.2 道路坡度算法仿真分析
通过车载GPS信息获取,可以计算得到该路段的实际道路坡度信息。以GPS获取的实际行驶的道路坡度为数据进行仿真,在Carsim与Simulink中建立仿真模型,仿真结果如图2所示。

图2 识别坡度与实际坡度
从图2可以看出:识别坡度与实际坡度曲线轨迹趋势一致,表明该坡度识别算法可以较为准确地预测出车辆所处的实际道路坡度信息。
3 基于BP神经网络的车速预测
车辆在实际行驶过程中,准确获取实时的汽车行驶工况信息是相当有难度的。但通过汽车历史行驶工况信息对未来时域的行驶工况信息进行合理预测,可以提前完成模式切换[12-15]。本文中选用BP神经网络算法,根据汽车历史行驶工况信息,以及对客车在坡道行驶的实际运行数据进行训练和测试,获得控制时域内的未来行驶工况。
BP神经网络是一个多层反馈神经网络,具有3层或3层以上的结构,分别是输入层(input layer)、一层或多层隐含层(hide layer)、输出层(output layer),结构如图3所示。

图3 BP神经网络结构示意图
BP神经网络模型建立过程为
模型的建立过程:
1) 输入层设为
(5)
2) 隐含层各个神经元的输入为
Nj=w1jx1+w2jx2+…+wnjxn
(6)
3) 隐含层各神经元单元的输出为

(7)
4) 输出层单元的输入为

(8)
输出层单元的输出为
Nout=vk+1,vk+2,…,vk+p
(9)
式中:Wnj为隐含层权值;θj为隐层单元的阈值;p为隐层单元的个数;Vjt为隐层到输出层的连接权重;rt为输出层单元阈值。
根据汽车的当前状态和历史车速信息,获取汽车工况特征参数,组成BP神经网络模型的输入;以洛阳市某混合动力客车在坡道行驶时实车运行车速作为训练数据及测试数据,对车辆运行车速进行分析,在进行样本训练和测试后,产生相应符合历史样本规律的车速输出。
经过BP神经网络训练后,预测时间分别设定1、5 s。2种情况下未来车速的预测结果如图4、5所示。
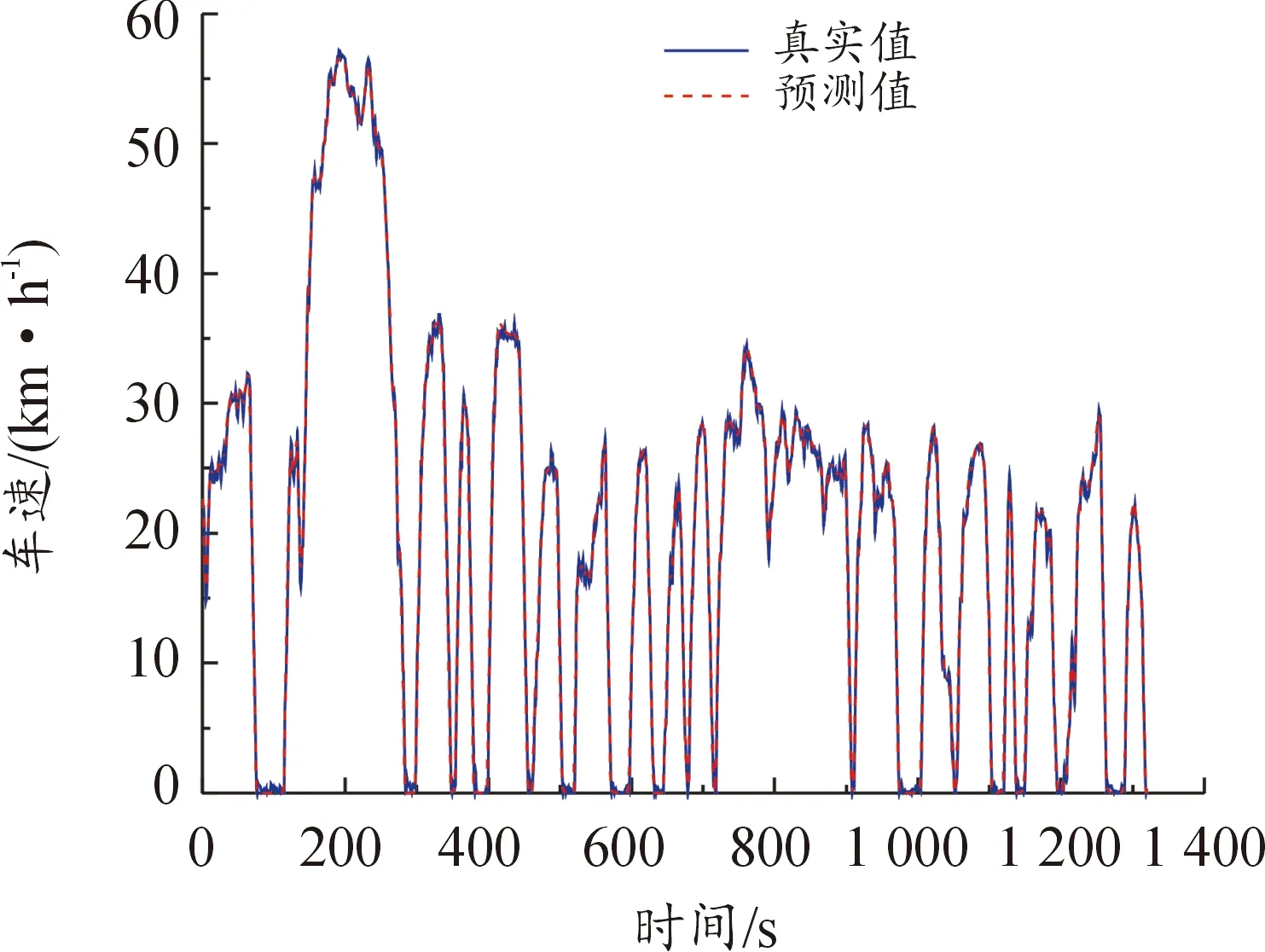
图4 1 s预测结果
从图4可以看出,当预测时域为1 s时,实际的车速曲线与预测曲线吻合度较高,预测值可以较为准确地跟随实际行驶工况趋势。从图5、6可以看出,预测时域分别为5、10 s时,实际车速曲线与预测车速曲线的吻合度逐渐减小,但总体趋势依然一致。

图5 5 s预测结果
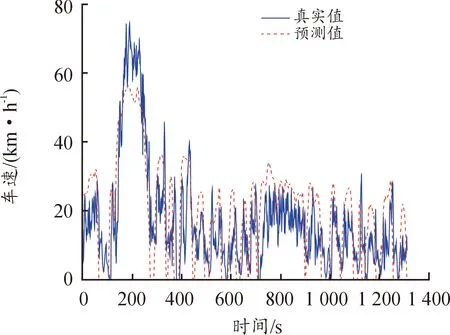
图6 10 s预测结果
4 HEB主动模式切换
基于以上分析,本文中提出基于道路坡度识别的HEB主动模式切换控制策略。传统车辆上坡时,通过驾驶员踩加速踏板增大混合驱动系统需求转矩,其模式才会发生变化,但对于上坡过程中的车辆,易产生模式切换时动力不足的问题。为此,在传统模式切换的基础上提出了基于道路坡度识别的主动模式切换。
混合动力系统模式切换控制流程如图7所示。当车辆行驶过程中识别到前方有上坡时,应用纵向道路坡度识别算法对道路坡度进行识别以及BP神经网络算法对车速进行预测,然后根据汽车动力学公式(10)求得整车预测时间内的需求转矩,再根据需求转矩以及SOC阈值确定模式状态。

图7 主动模式切换控制流程
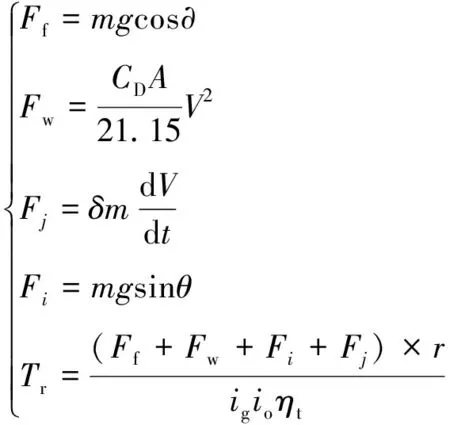
(10)
式中:Ff为滚动阻力;Fw为空气阻力;Fi为坡度阻力;m为汽车整备质量,∂为道路坡度,CD为风阻系数,V为当前车速。
混合动力系统不仅需要确定需求转矩,还需要考虑电池SOC的大小,当电池SOC过低,发动机进入工作模式状态。因此,在利用汽车动力学公式求得车辆的目标需求转矩后,同时还需要考虑电池SOC的阈值范围。表3是混合动力汽车的各个模式的运行条件,根据车辆的需求转矩和电池SOC阈值判断混合动力系统的工作模式。

表3 混合动力汽车工作模式
根据混合动力汽车工作模式的划分依据,发动机的目标转矩与总的需求转矩关系为
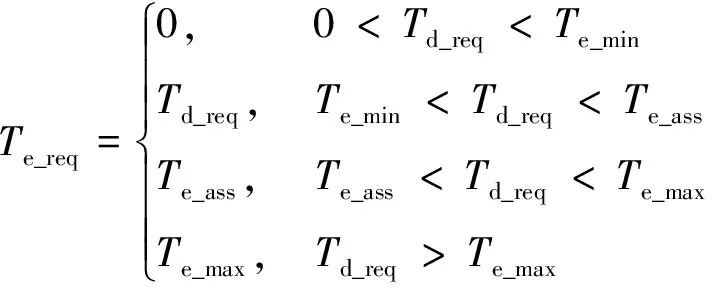
(11)
式中:Te_req为发动机的需求转矩;Td_req为混合动力系统的需求转矩;Te_min为发动机的最小转矩;Te_ass为发动机的最佳燃油经济区域转矩;Te_max为发动机的最大转矩。
确定发动机目标转矩和总的需求转矩关系之后,也可以得到电机的目标转矩,即
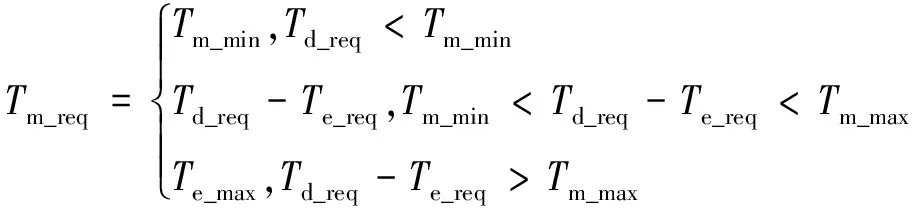
(12)
式中:Tm_req为电机需求转矩;Tm_min为电机最小转矩;Te_max为电机最大转矩。
根据以上得出的模式切换种类,为使被动切换变为主动,涉及发动机介入的模式时保证发动机及时的进入工作状态,本文中以纯电动模式向混合驱动模式为研究对象,控制策略流程如图8所示。
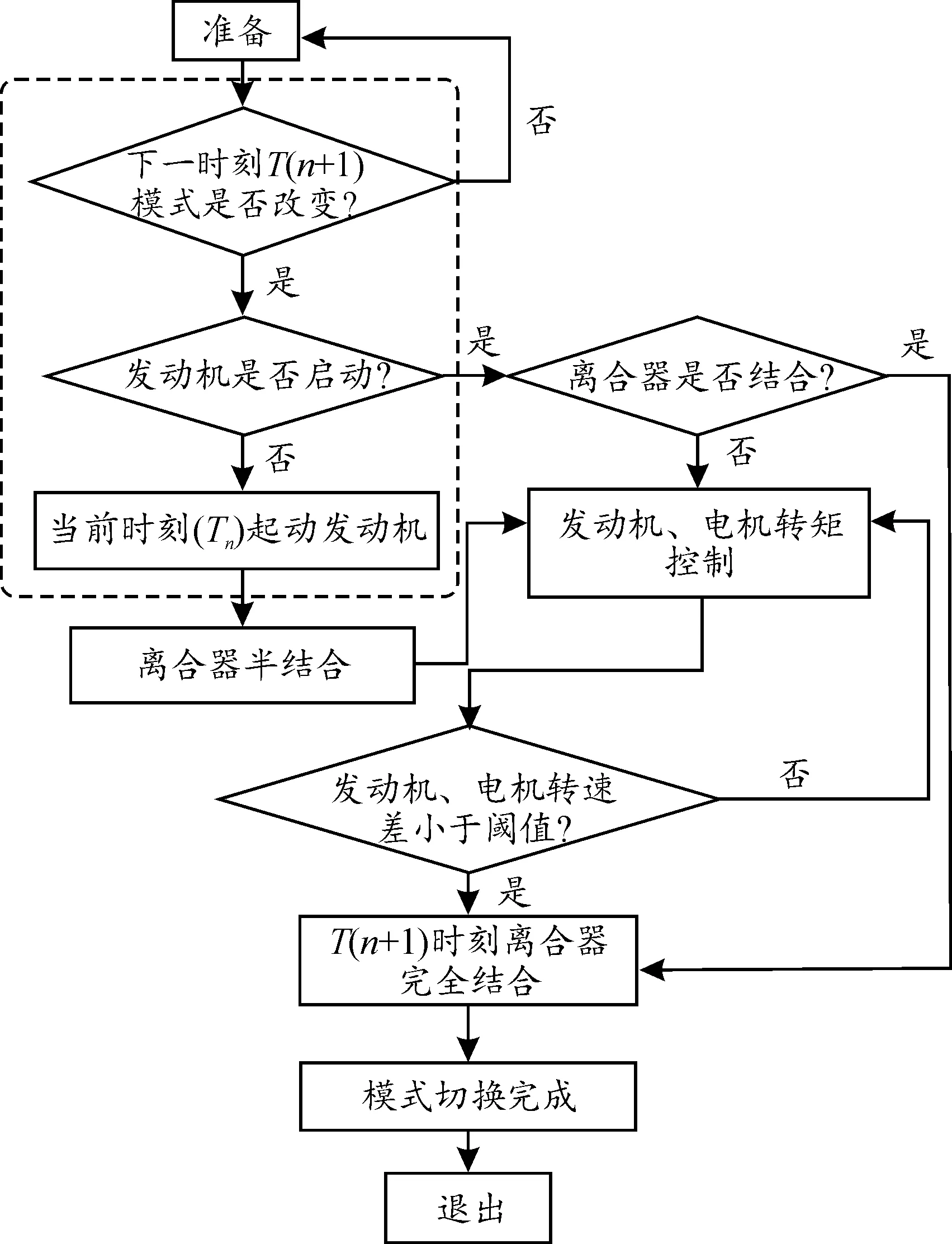
图8 纯电动模式转换为混合驱动模式的主动模式切换流程
第一阶段,在Tn时刻,汽车在平直路面上行驶,混合动力系统由电机单独驱动,发动机关闭,离合器分离,电机的目标转矩为:
Tm_req=Td_req
(13)
第二阶段(预测阶段):车辆识别前方有上坡时,基于纵向动力学识别算法识别坡度,BP神经网络算法预测Tn+1时刻的车速。此阶段的动力源仍为电机。
第三阶段(模式确定阶段):根据汽车动力学公式计算Tn+1时刻的需求转矩,根据上文提到的工作模式确定条件确定混合动力系统的工作模式状态。
第四阶段(模式切换):当预测的Tn+1时刻的需求转矩大于电机的最大转矩,汽车上坡过程中需要加速,若车辆的需求转矩增大至电机与发动机混合驱动才能满足整车的需求转矩时,此时混合动力系统由纯电动模式切换至混合驱动模式。整车控制器发出模式切换指令,关键零部件离合器、变速器等进入工作状态,进行模式切换。此过程在当前Tn时刻,发动机先启动,逐步进行接合离合器,使发动机转速与电机尽快同步。
第五阶段:随着下一时刻的到来,发动机的转矩通过驾驶员调节节气门开度控制,此时离合器处于滑膜状态。
第六阶段:离合器逐渐接合的过程阶段,根据离合器主、从动盘转速差于设定阈值的关系,若离合器主、从动盘转速差小于设定的阈值,离合器迅速接合。离合器完全接合后,发动机、电机进入转矩控制模式,模式切换流程完成。
5 仿真与结果分析
针对提出的混合动力总成,通过Matlab/Simulink建立仿真模型,以验证所提出的主动模式切换控制方法的有效性。对客车由平缓路段上坡进行模拟仿真。
在汽车上坡前,只考虑上坡过程,不考虑下坡,需求转矩小于发动机最佳经济转矩曲线。从图9和图10可以看出,当坡度发生变化时,发动机和电机的转矩发生了改变。在预测时间内预测到需求转矩足以改变驱动模式。

图9 坡度转矩
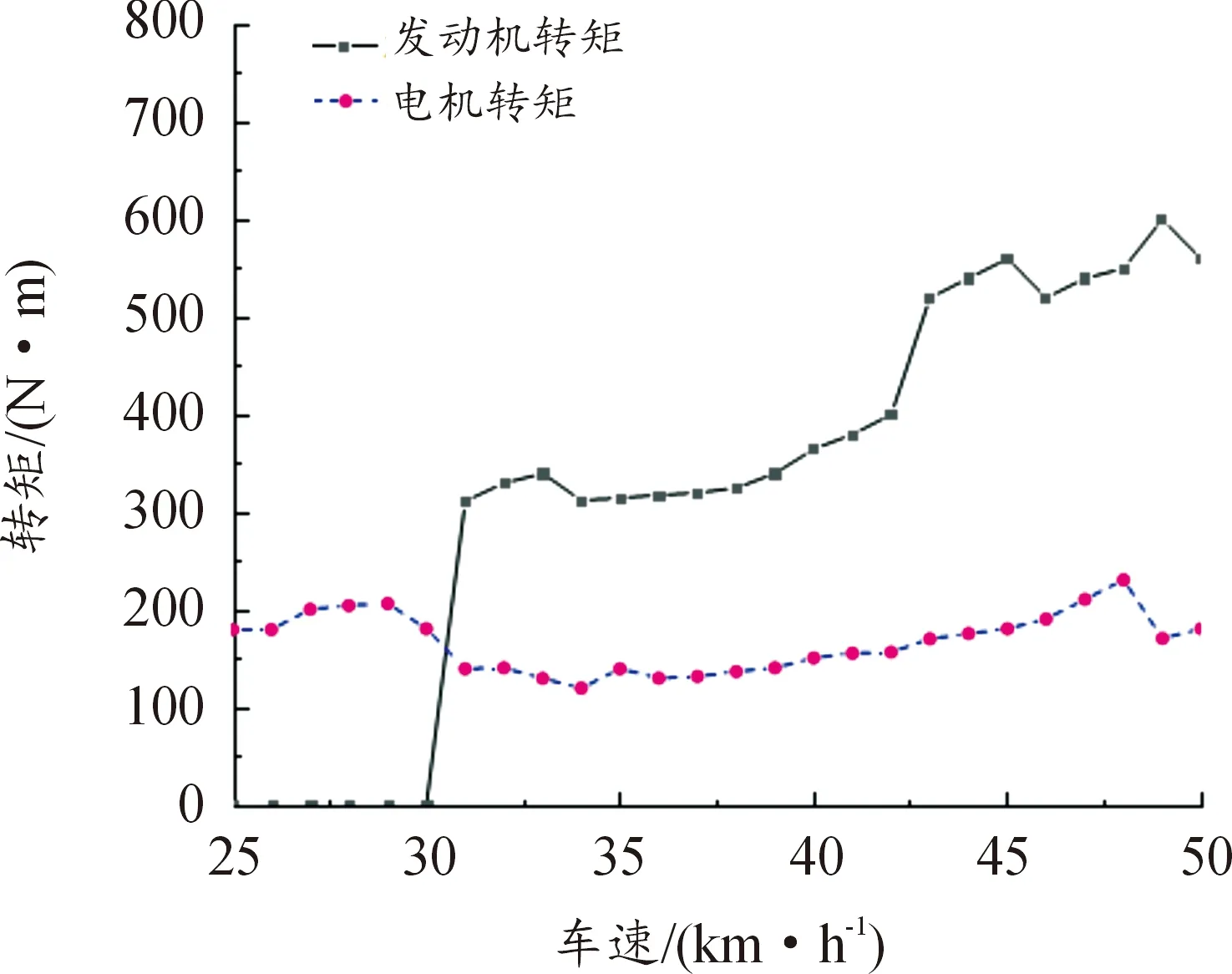
图10 车速转矩
车辆起步开始行驶阶段是以纯电动模式,整车的动力来源于电机,而且仅由电机来提供。在9 s时开始进行模式切换,由图11和图12可得出,发动机与电机的输出转矩在所提出的主动模式切换控制策略比传统模式切换提前了5 s左右。由图13离合器状态可得,汽车在上坡前,混合动力汽车离合器已经开始结合,发动机启动。可以看出,汽车提前5 s左右完成模式切换过程,可以有效避免上坡动力不足的问题。

图11 发动机输出转矩

图12 电机输出转矩
6 结论
针对混合动力客车上坡时模式切换可能会造成动力不足的问题,提出了基于道路坡度识别的HEB主动模式切换控制策略,建立了Matlab/Simulink仿真模型。
1) 针对洛阳市某旅游路线的混合动力客车在坡道运行数据,建立基于纵向动力学的道路坡度识别算法。
2) 建立的BP神经网络算法车速预测模型,能基本满足车速和转矩预测需求。根据车速预测结果,在控制时域内求得下一时刻的需求转矩;根据需求转矩以及SOC值进行模式状态确定,使汽车在上坡前完成模式切换。
3) 根据所提出的混合动力客车主动模式切换控制策略,混合动力系统在预测时域之前(即将爬坡)进行模式切换,避免了客车在上坡过程中动力不足。
猜你喜欢
文萃报·周二版(2022年23期)2022-06-11
做人与处世(2022年2期)2022-05-26
城市道桥与防洪(2019年5期)2019-06-26
数位时尚(幼儿教育)(2018年10期)2018-10-30
汽车维护与修理(2018年1期)2018-04-04
红蜻蜓·低年级(2016年6期)2016-05-14
电气化铁道(2016年4期)2016-04-16
河北遥感(2015年2期)2015-07-18
医学研究杂志(2015年4期)2015-06-10
汽车维护与修理(2015年5期)2015-02-28