
自动化技术在建筑装修工程中的应用
2023-09-13 12:04吴文凯赵寒涛
黑龙江科学 2023年16期
吴文凯,赵寒涛,李 麒,董 莘
(黑龙江省科学院智能制造研究所,哈尔滨 150090)
0 引言
建筑业在科技革新的推动下,作为劳动密集型的传统产业具有巨大的升级空间,要推进新型城市建设,需发展智能建造,推广绿色建材、装配式建筑及钢结构住宅[1]。装修工程是建筑业的重要组成部分,传统的施工方法与手段存在机械化程度低、生产效率低、质量不稳定、依赖成熟技术工人等缺点,限制了其发展,而将自动化技术应用于建筑装修工程中,可全面提升其智能化、自动化程度,推动智能建造的发展。
装修装饰工程是建筑物完成主体结构建造后通过进一步作业达到投入使用目的所需的施工工程,包括建筑地面工程、抹灰工程、门窗工程、吊顶工程、轻质隔墙工程、饰面工程、幕墙工程、涂饰工程、裱糊与软包工程、细部工程等[2],具有项目繁杂、工程量大、周期长、人工量大、造价高等特点,普遍存在机械化施工程度与生产效率低及施工质量不稳定的问题,其生产效率与施工质量主要取决于管理制度的完善程度及施工人员的技术水平,故亟需提升施工作业的机械化、自动化、智能化水平,利用重复精度较高的自动化施工设备,保障施工质量与效率,节约工程成本。建筑业对装修施工作业自动化的需求体现在以下几个方面。
1)重体力作业的机械化替代。室内装修工程同其他建筑工程类似,存在重体力作业,涉及设备、物料的搬运与使用,对工人的体力有着较高的要求。许多工序需要登高作业,存在诸多的安全隐患。而机械化施工作业可以有效提高工作效率,节省人工,减少安全隐患。
2)保证高精度的施工作业。装修施工工程是对毛坯建筑物不平整、歪斜结构面或线进行找平修正、补平等,单纯依靠人工进行测量施工精度有限,人为引入误差波动较大,难以保证高效完成高精度作业。引入自动化测量技术,结合机械化的高重复精度,是保证高精度作业的重要途径。
3)技术工种工序的自动化替代。装修工程许多工序作业如抹灰、刮腻、铺砖等对技术工人的要求较高,高度依赖数量有限、培养周期长的熟练技术工人,导致施工质量及生产效率相互制约,难以实现高效高质量工程。开发专用的自动化设备及配套工艺技术,操作便捷,不依赖工人作业,可达到更高质量、更高水平、更高效率的施工。
4)质量验收自动化。装修工程完成施工后需要进行检测验收,质检人员按照规定的标准流程作业,采用专业的检测测量仪器进行验收。但部分检测指标的几何尺寸无法实现穷尽测量,采用抽取检测结果则可能遗漏有缺陷的位置。随着技术的发展,视觉检测技术已成功应用于装修工程质量验收中,可以更加直接全面地检测参数,实现质量验收自动化,全面提升效率。
5)施工作业的数字化与信息化。装修工程质量与施工管理水平密切相关,采集、整理、统计、分析、管理施工数据是智能建造必不可少的环节。构建自主可控的工程项目管理平台,建立企业、行业大数据中心,提供大数据分布式云存储、高效处理及计算,创建全息数字化模型,对工程建造全过程数据流、工作流进行管控是工程施工实现数字化与信息化发展的主要趋势[3]。
1 自动化技术的应用
将各种先进的自动化技术如传感器测量、人工智能、自动控制、视觉识别、机器人等引入到建筑业中是未来的发展趋势。以下自动化技术已应用于装修工程中,实现了数字化、智能化建设。
1.1 BIM建筑信息模型技术
BIM(Buildig Information Modeling)是建筑信息建模技术,是利用信息技术将工程/设施通过数字化处理,将各式信息以3D形式用于协助或解决工程不同生命周期阶段各种问题[4]。BIM模型中每一个构件都包含具体信息,包括材料、单价、重量、厂家、进度、负责人等,并在建筑设计、施工、运维的每个阶段中进行精细化管理。
BIM全寿命周期模型直观可视,通过三维图形可以完整地表达建筑的空间位置关系及构件的几何形状,可视化地呈现所有参数报表及建设效果图,帮助完成项目设计、建造、运营决策。在装修施工中应用BIM技术,可将CAD设计图纸转化成可视化三维模型,使人们及时发现设计或施工中存在的问题,实现各部门的信息沟通共享,通过计算工程用料、用量来提高效率,保障项目顺利进行。
1.2 SLAM建图导航技术
SLAM技术(Simultaneous Localization and Mapping)即时定位与地图构建技术,一般是指机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置及地图进行自身定位,建造增量式地图,是实现机器人自主定位及导航的重要技术[5]。
室内装修工程智能化施工需要机器人具有较强的自主性,能够进行自身导航并进行定位施工,因此SLAM技术的应用尤为重要。目前,SLAM系统主要基于视觉、激光雷达、超声波雷达及惯性导航传感器等硬件设备进行环境感知与探测,通过测量机器人当前所在位置方位与周围墙面、立柱、障碍物的距离,进行不断扫描以建立环境地图。基于惯性导航传感器定位设备所在位置,生产自动规划的行驶路径与施工定位点,为高精度施工进行准确定位。
1.3 机器视觉技术
机器视觉技术是通过光学装置及非接触式传感器自动接收、处理一幅真实物体的图像,获得所需信息并将其用于控制机器运动的装置[6]。
装修工程需要进行自动化设备站位定位,传统的人工作业通过激光投线仪等设备进行手动找正,而自动化施工可实现自动测量定位,借助机器视觉技术,在结构光的照射环境下,通过工业相机对测量对象进行图像采集,结合模式识别技术对施工对象的几何要素、表面平整度、光洁度等进行检测,引导末端执行机构调整角度校正作业姿态,对已完成施工的对象进行测量检验以评价是否符合施工要求,从而实现自动化施工及指标检测功能。
2 装修机器人的发展
自动化技术在建筑装修工程中的应用越来越多,适用于各种工程施工的装修机器人不断涌现,成为智能建造不可或缺的重要组成。按施工类型主要分为以下几种:
2.1 喷涂机器人
装修喷涂作业相较于滚涂具有更高的效率,但作业过程污染较大,采用机器人替代人工能够减少对施工人员的身体损害。不同于工业喷涂机器人相对固定的方式,装修喷涂机器人具有自行规划施工路径并自动移动的功能。
2007 年,研究人员开发了室内装修机器人(如图1)用于墙面喷漆,采用机械臂作为动作机构,可进行油漆混合喷涂,实现颜色的调配[7]。

图1 室内装修机器人
2018年,研究人员开发了用于室内墙壁喷漆的机器人Pictobot(如图2),它是一种基于激光扫描引导的可移动6自由度机器手喷涂系统,通过三维激光扫描仪识别环境地形,可避免油漆等有害物质被人体摄入的风险及危害[8]。

图2 Pictobot机器人
我国研发的室内喷涂机器人能够对墙面、天花板及石膏线等结构进行乳胶漆的底漆、面漆喷涂,实现室内喷涂的自动化(如图3)。

图3 我国研制的室内喷涂机器人
2.2 抹灰机器人
抹灰工程是对毛坯墙面进行灰浆的抹涂、刮平作业,实现对墙面凹凸、歪斜粗的找平,以弥补浇筑过程后产生的表面缺陷。抹灰工程工序十分重要,是后续刮腻子、喷漆及贴砖的必要作业,施工量大,占用人工多,找正要求高,工人熟练程度对其施工质量影响较大。抹灰施工机器人的出现大大提高了墙面施工的自动化程度及质量。目前较为成熟的抹灰机械产品主要为钢丝绳吊挂式及齿轮齿条式抹灰机(如图4),能够将砂浆涂覆于墙面再进行振实刮平作业的半自动化,在一定程度上实现了人工替代,但仍存在生产效率低、抹灰密实程度不均匀、功损相对较高等问题[9]。
抹灰工程“智能装备+产业工人”模式采用砂浆输送泵+机械喷涂机+刮平机器人3种设备组合使用(如图5),实现了砂浆自出罐泵送至楼层、喷涂上墙至抹面成型的人机融合作业。

图5 抹灰机器人
机器人抹灰系统(如图6)已应用于某项目的地下室主配电机房墙面抹灰工程中。由供料设备、送料管、抹灰机器人等部分组成,通过BIM建模提前布放的定位激光线,实现机器抹灰。

图6 机器人抹灰系统
2.3 铺砖机器人
墙面与地面装饰磁砖的铺贴是装修工程的重要组成部分,要求砖块间表面平整、接缝均匀、水平垂直,对工人的技术水平要求很高。
智能机器人协作铺砖系统(如图7)基于CSPACE实时仿真控制系统及MATLAB/Simulink开发,利用机器臂完成取砖、抹灰、铺贴等一系列动作,完成地砖铺贴施工。
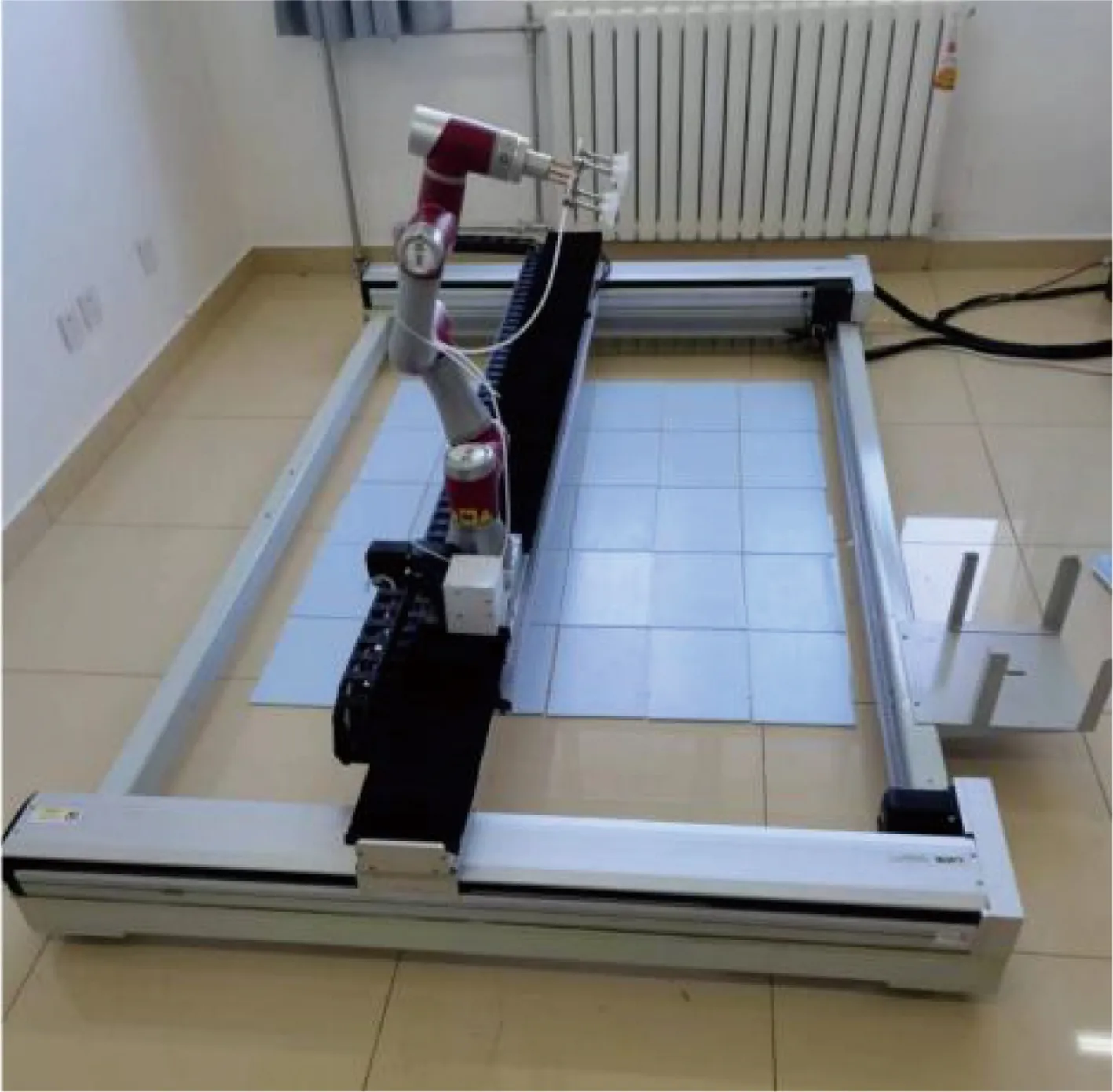
图7 智能机器人协作铺砖系统
地砖铺贴机器人CA80(如图8)利用综合激光导航、视觉识别、标高定位等技术实现了机器人的自主行走、精准移位、规划铺贴,进行瓷砖胶铺设、地砖运输、地砖铺设施工过程自动化作业。还开发了一款用于室内墙砖铺贴的自动化机器人(如图9)。

图8 砖铺贴机器人CA80

图9 墙砖铺贴机器人
2.4 其他建筑装修机器人
除上述装修机器人外,研究人员根据不同的市场需求开发了各类产品,如地面整平机器人、墙面打磨机器人、腻子涂覆机器人等。这些机器人处于不同的开发与应用阶段,对建筑装修工程的智能化、自动化升级起到重要的推动作用,是智能建造的必然发展趋势。
3 结束语
针对智能制造的发展趋势,分析了室内装修工程对于施工自动化的需求,介绍了自动化技术在建筑装修中的应用及主要的机器人产品,以期促进建筑装修的智能化、自动化的发展。
猜你喜欢
建材发展导向(2022年3期)2022-04-19
建材发展导向(2021年19期)2021-12-06
中州建设(2021年1期)2021-12-02
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年10期)2021-07-16
建材发展导向(2021年9期)2021-07-16
航空制造技术(2020年9期)2020-07-02
就业与保障(2018年20期)2018-12-22
科技创新导报(2017年36期)2018-06-05
建筑与装饰(2018年3期)2018-02-17
