
三维激光扫描技术在城市地标建筑三维模型重建中的应用
2023-09-13 12:04毛芳芳
黑龙江科学 2023年16期
赵 磊,毛芳芳
(1.中国电建集团河南省电力勘测设计院有限公司,郑州 450000; 2.郑州升达经贸管理学院,郑州 450000)
0 引言
城市地标建筑具有建筑艺术和美学价值,在城市规划、文化传承、旅游推广等方面具有十分重要的意义。三维模型作为城市规划、设计的重要参照物,能够提供更加真实的建筑高度、形状、结构等信息,既是创建城市特色及品牌形象的重要手段,也是智慧城市发展的重要组成部分,对城市规划建设、提升城市智慧化及数字化、促进可持续发展起着至关重要的作用[1-2]。
传统的三维建模方法通常需要应用全站仪等测量仪器在场地进行实地测量,由于地标建筑一般位于城市广场中心,人流量较大,传统测量仪器逐点采集外业数据的时间较长,且地标建筑一般具有复杂结构、大量细节及不规则形状,故此传统的三维建模方式难以完整展示建筑细节。三维激光扫描技术精准快速,可以快速获取被测物体的表面形态及高精度的坐标数据,具有高效自动化处理能力,能够生成精确的三维模型,在采集数据的过程中保留了建筑结构及细节信息,亦满足了高精度、高效率、高质量的测绘要求,可减少现场数据采集时间及成本,为数字化建造及智慧城市建设提供强有力的技术支持及保障[3]。三维激光扫描系统的测量原理是利用发出的激光脉冲束照射物体,对物体表面进行扫描,记录每个位置激光的发射及反射时刻,通过记录光传播时间,计算出激光束传播路径的距离与间距,再根据接收激光束返回的反射波水平及垂直方向的偏向值得到物体表面各个位置的三维坐标信息。如图1所示,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直,获得P点坐标[4]。
1 测区概况及点云数据处理
1.1 测区概况
实验目标对象为某城市标志性雕塑,高达30 m,直径27 m,重达500余吨,为大型钢质城市雕塑。该雕塑辅以火红色的外层喷涂,造型采用螺旋向上的钢板结构组合,具有较强的历史、文化及艺术价值。需建立该地标建筑三维模型,便于后期在城市vr全景地图上展示当地特色。由于该地标建筑较为复杂,传统建模方式难度较大,拟基于三维激光扫描技术进行三维建模,整体技术流程如图2所示。
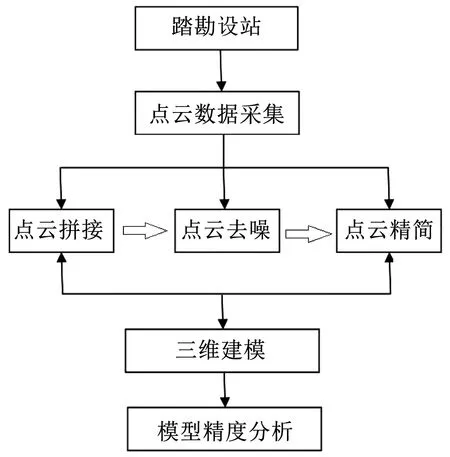
图2 整体技术路线设计
开展实地踏勘并确定扫描仪设站数量及位置,架设扫描仪并在仪器上进行参数设置,逐站进行点云数据采集及数据预处理,包括点云拼接、点云去噪及精简等。将点云数据导入到建模软件中,应用建模工具及技术进行三维模型重建,对模型精度进行分析。
1.2 外业数据采集及预处理
为确保能够采集完整的地标建筑点云数据,避免补测或重复测量,根据整体技术设计要求进行踏勘及实地考察,按照测区实际情况进行测站布设,发现目标体整体较高,普通地面扫描仪因视角偏差原因难以获得建筑物完整的点云数据,采用专用升降三脚架放置三维激光扫描仪,调整扫描仪的高度与角度,使扫描仪可以高效、准确地采集目标建筑的点云数据,减少点云数据采集造成的盲区。外业数据采集测站布设方案如图3所示[5]。

图3 外业数据采集测站布设
从该雕塑西南角逆时针进行数据采集,共架设8个测站,为完整采集雕塑顶部点云数据,测站间远近交错以减少遮挡带来的扫描偏差,在获得完整细节数据的基础上避免造成数据冗余。为提高点云拼接精度,现场布设一定数量的靶标球,为减小数据解算过程中的误差累积,路线规划时回到原始起点,构成闭合环路。待以上工作准备好后,将扫描仪升至合适高度,连接电源与计算机等设备,设置扫描参数进行扫描作业。
内业预处理主要包括点云拼接、点云去噪及点云精简。点云数据配准是将不同视角的点云数据转换到统一视角下;点云去噪是根据场景需求进行几何或统计学滤波,去除干扰或不必要的点,获得更纯净的点云数据;点云精简是根据场景需求进行稀疏化或密集化处理,以便后续操作获取良好的处理效果。待以上处理完成后,对点云数据进行分割,对主体部分及底座点云分别进行裁剪另存。预处理效果如图4所示[6-7]。
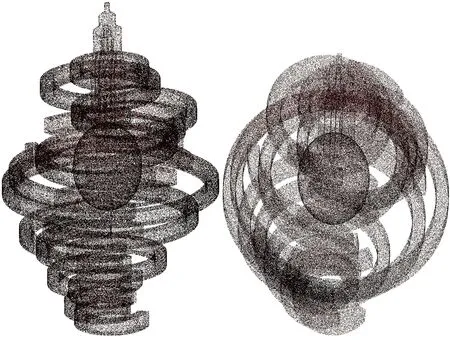
图4 预处理后的地标建筑物点云数据
2 模型重建及立面图绘制
对目标建筑实地踏勘后发现,该雕塑既有规则结构如长方体底座等,又有不规则构造如螺旋钢板等,需针对不同构造应用不同技术分别建模。
2.1 三维模型重建
螺旋钢板属于曲面构造,应用传统建模工具难度较大,故应用Geomagic Studio软件进行逆向建模。需要注意的是,逆向建模时,点云数据的质量及分辨率对生成的三维模型精度及准确度有很大影响,在导入点云数据前要尽量保证数据质量,提高点云数据的采集精度及分辨率。根据建模需求选择合适的参数配置际编辑工具,对建模过程进行优化及调整,以获得高质量的三维模型。将点云数据导入到Geomagic Studio软件中,对导入的点云数据进行去除体外孤点及去噪处理,再点击封装命令,并对封装参数进行设置,从而对复杂曲面构造进行拟合建模。选择模型观察封装情况,对模型进行优化处理,如对网格面片存在凹凸不平的面进行平滑、磨砂及三角网修复等精细化处理[8]。
对于规则结构,将点云数据导入3d max软件中建模,使用3d max插件转换点云格式,以点云数据为参考,对点云数据进行缩放、旋转等操作,使用3d max中的各种建模工具建立基座模型,并对模型形状、颜色、质感等进行调整及优化,导入Geomagic Studio软件中,与建立好的螺旋钢板模型进行合并,目标地标建筑整体模型效果如图5所示。
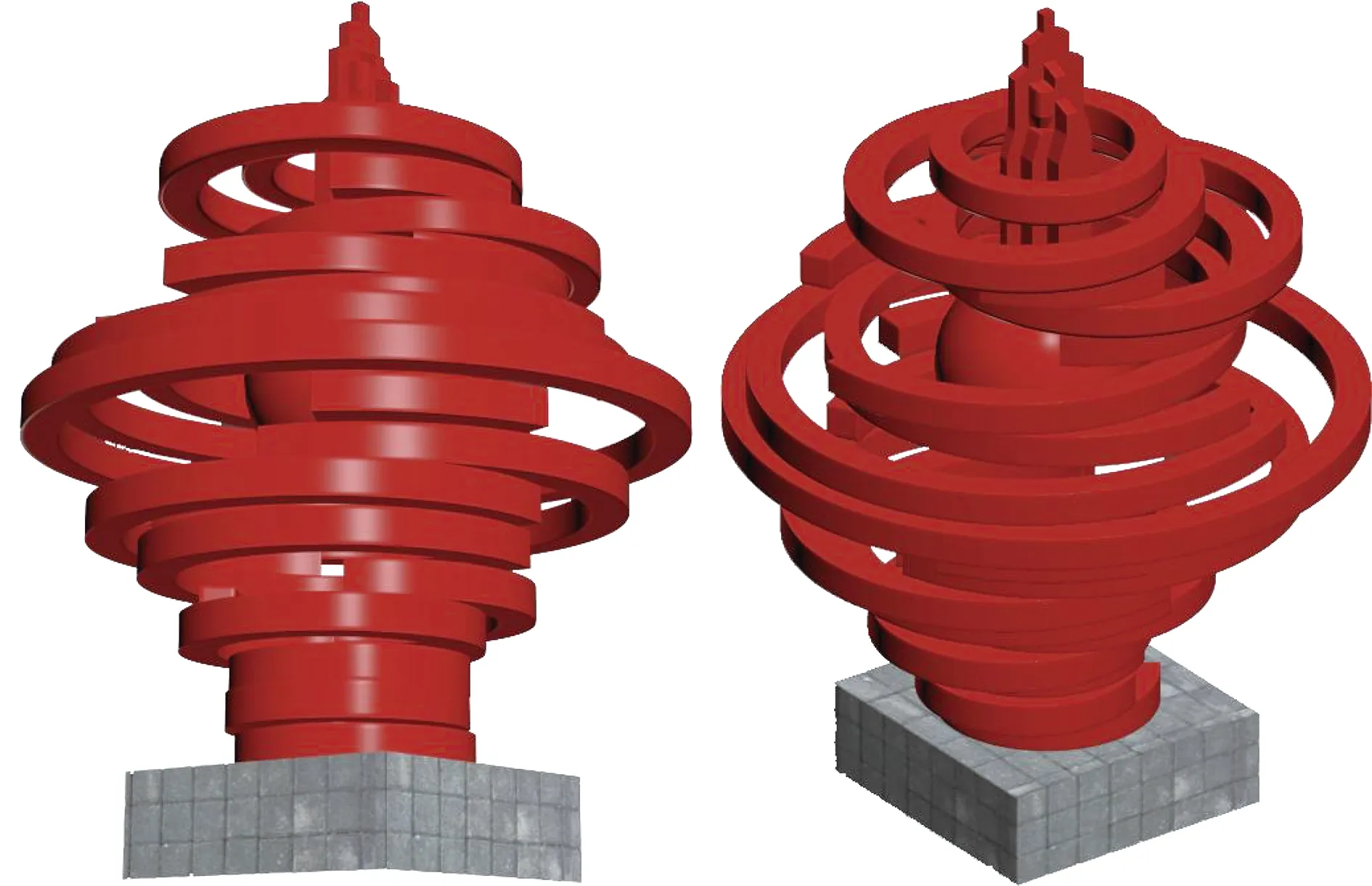
图5 合并后的地标建筑三维模型
2.2 三维模型精度验证
通过图5可以看出,外观上,建立好的三维模型整体结构完整,真实感较强,模型质量较高。对模型进行验证分析,对比实地量测特征点间的距离与模型上量测相应特征点的距离,选择平面与高程检查点共12个(YZD1-YZD10),评定方法是直接测量三维实景模型上两个检查点的边长与全站仪实测的边长,进行偏差计算,结果如表1所示。
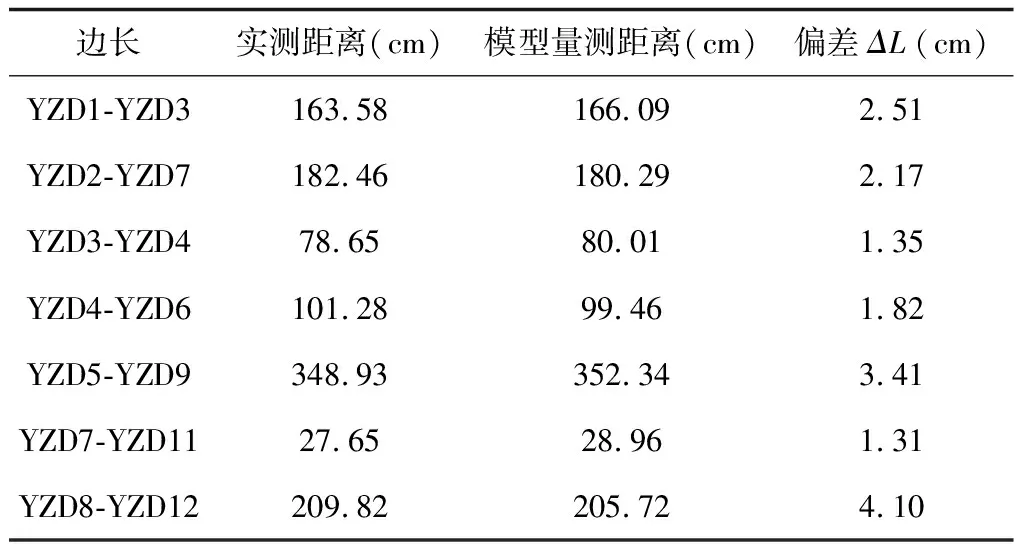
表1 实测边长与模型量测边长偏差
根据表1实测边长与模型量测偏差得到边长中误差为2.78 cm,最大相对偏差为4.74%,整体来看精度较高。
通常情况下,模型相对误差不超过建模精度的5%即能满足相关应用要求,本方法最大相对误差不超过相关规范,建模精度达到相关要求。
3 结束语
应用三维激光扫描技术对地标建筑进行无接触扫描,快速获取目标建筑密集点云数据,基于点云数据建立三维模型,通过精度分析得出模型效果较佳。研究结果表明,三维激光扫描技术在地标建筑三维模型重建中具有较好的应用效果,可为城市规划、景观设计、旅游推广等提供新手段,未来可为智慧城市建设提供可靠的数据支持,令城市管理及服务更加高效、便捷。
猜你喜欢
小学生学习指导(中年级)(2021年10期)2021-11-01
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
数学小灵通·3-4年级(2017年12期)2018-01-23
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
中学数学杂志(高中版)(2015年3期)2015-05-28
现代营销·经营版(2015年3期)2015-04-20
现代防御技术(2014年6期)2014-02-28
现代营销·经营版(2013年5期)2013-05-14
