水翼三维非稳态空化流动特性数值研究
2023-09-13 13:19:42李伟平
实验室研究与探索 2023年6期
邓 飞, 张 松, 梁 兴, 李伟平
(1.南昌工程学院南昌市低品位能源转化与系统节能技术重点实验室,南昌 330099;2.渝能(集团)有限责任公司,重庆 401121)
0 引言
水翼空化具有强烈的非定常特性,易引起流场空泡团产生,形成周期性脉动造成水翼水动力载荷变化,从而出现水翼振动和流场噪声等问题[1],影响流体机械的安全可靠运行。一直以来,研究空化发生的机理、特性和抑制技术都是流体机械研究的重点和难点[2]。研究表明,水翼安放角度[3]、雷诺数、绕流速度[4]等水力因素决定了水翼的绕流特征。谢春梅等[5]针对高雷诺数下三维水翼的梢涡流场,采用基于浸没边界法的壁模型大涡模拟方法,对NACA16020 水翼进行了数值研究,系统观察了流场的各类统计特性。Wei 等[6]对翼型在6°攻角下的水动力及空化性能进行数值研究,当空化发生时水动力特性将剧烈恶化。刘胡涛等[7]对高雷诺数的NACA0012 水翼绕流开展了数值计算,探讨了初始攻角条件、绕流速度以及刚心位置三个因素对水翼振动的影响,水翼振动状态依赖于系统的初始条件,当绕流速度不断增大时水翼将发生颤振现象。田北晨等[8]基于建立的多尺度算法对绕NACA66 水翼空化流动进行模拟,在回射流发展阶段,离散空泡逐渐增加并分布在回射流扰动区。Yang等[9]采用MRT-LBM方法对空泡溃灭进行热力学分析并验证了MRT-LBM空泡溃灭的有效性。
目前,针对水翼空化现象的机理研究主要集中在空泡初生阶段[10-11],对不同绕流速度下的水翼空化特性及其准周期性演变过程研究较少。本文针对不同绕流速度下的NACA6408 水翼非稳态绕流过程,数值研究各流动因素的变化规律以及其对水翼空化过程的影响,旨在获取水翼发生空化的临界绕流速度和压力等重要参数,以及空化过程的准周期性特征等。
1 数值模型与网格划分
本文采用计算流体动力学软件Fluent 16.0 进行数值模拟研究,如图1 所示为NACA6408 三维水翼计算域模型,依据该水翼的相对弯度和相对厚度,对其及流体域进行建模。整个流体域长度为10b,其中b为水翼弦长,进口距水翼前缘距离为3b,出口距水翼尾缘为6b,计算域的进口面、出口面尺寸为150 mm×150 mm。
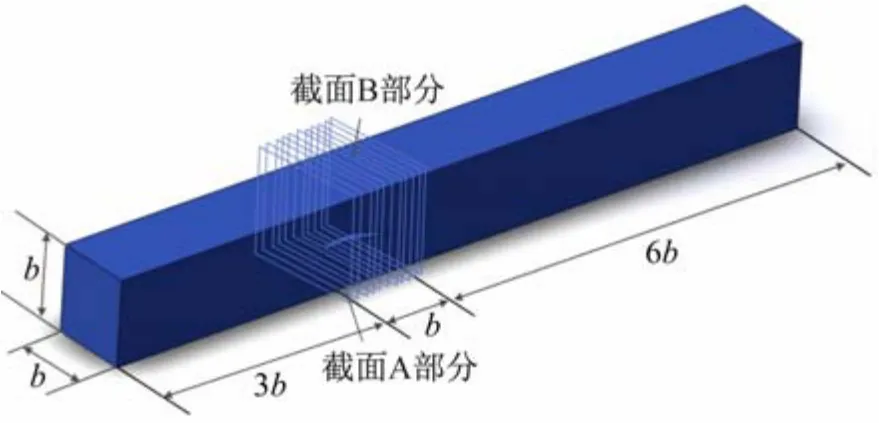
图1 NACA6408三维水翼计算域模型
本文利用ICEM 网格划分软件对三维NACA6408水翼计算域进行结构化网格划分,针对水翼的头部、尾部及上下壁面等部位进行局部网格加密。经过网格无关性计算验证,当网格尺寸小于0.07 mm 时,水翼的升力系数趋于稳定[12],为合理利用计算机资源,提高数值模拟的准确性、经济性,采用边界层为0.07 mm的网格尺寸,网格总数为5501430。采用k-ε 湍流模型[13]和Zwart-Gerber-Belarnri(ZGB)空化模型[14]进行模拟计算,与Schnerr-Sauer(SS)空化模型比较,本文采用的Zwart-Gerber-Belarnri(ZGB)空化模型使用空泡密度表示气相的体积分数[15],能够更好地模拟出非定常空化的准周期性,捕捉到更强烈的云状空化。
2 计算结果与讨论
计算模型的b=150 mm,计算域长度则为1.5 m,在绕流速度υin=1、5、10、15 和20 m/s 5 种工况下分别进行数值模拟计算。在沿翼型主流方向等间距截取11 个截面i(i=1,2,…,11)。由于翼型结构特点,同一个截面将被翼型分成上下两部分(见图1),令水翼吸力面以上的截面为B 部分,即Bi,压力面以下的截面为A部分,即Ai。
通过对绕流攻角为4°时的5 种不同绕流速度工况依次计算,数值结果表明翼型在υin=1、5 和10 m/s工况下不会发生空化,在υin=15 和20 m/s 时产生空化现象。在前3 种工况下,截面A 部分的压力在不同位置处变化较小,主要是由于NACA6408 翼型结构的压力面曲率很小;截面B部分的平均压力pav先减小后增加,即pav从截面B1减小至截面B4后增大,直至截面B11,原因是截面面积的变化使速度呈现出先增大后减小的规律,pav则是先减小后增大。此时同一截面的A与B部分的pav和湍动能κ 变化平稳,不存在空化现象。
如表1 所列为不同υin工况下以截面1、4、6、8、11为代表的B部分截面pav值。从表中可以看出,在同一υin下,不同时间(t=0.05 和0.1 s)与不同截面间的pav略有不同,但是维持在同一个数量级。υin<10 m/s时没有发生空化,截面B1~B4间的pav随着速度的增加而逐渐减小,相同速度下截面B6~B11间的pav逐渐增大;υin=5 m/s时,pav≥89.528 kPa;当υin=10 m/s时,pav≥52. 192 kPa;而当υin=15 m/s 时,pav≥11.890 kPa,当υin=20 m/s 时,pav≥9.763 kPa。因此发生空化时,pav≤52.192 kPa。

表1 不同工况下截面B部分的pav变化kPa
如图2 所示为υin=15 m/s下翼展中间截面体积分数及压力云图。由图2(a)可知,在此工况下翼型的空化呈现一定的周期性,且周期T=75 ms。由于此工况为非定常流动,无法对每个时刻进行描述,故将一个周期均分为8 等分以方便分析。在T/8 时,空化开始出现于沿翼型吸力面主流方向b/4 ~b/2 处且附着于吸力面,随着时间推移空化过程越来越明显;在2T/8时,翼型吸力面b/4 ~b/2 处附着型空泡开始向钩状空泡转变;在3T/8 时,附着型空泡长度达到最大,其在钩状空泡向后延伸至翼型吸力面4b/5 处开始脱落;在4T/8 ~5T/8 时,空泡在翼型吸力面4b/5 处部分脱落,脱落后的空泡流向下游;在6T/8 时,剩余空泡继续附着于翼型吸力面b/3 ~5b/6 处且空泡长度随着时间推移而逐渐变小;在7T/8 时,空泡长度缩短至翼型吸力面b/3 ~2b/3 处,最终在8T/8 时逐渐减小为零并进入下一个周期,空化过程呈现出准周期性规律。由图2(b)中可知,在6T/8 时,低压区的覆盖范围最大,随后低压区的覆盖范围开始减小;在8T/8 时,低压区的覆盖范围达到最小,且与初始时刻的压力p相同,从而形成一个完整的周期。结合图2(a)可知,此时翼型吸力面低压区的p低于空化发生的临界压力。

图2 在υin =15 m/s时,翼展中间截面的体积分数及压力云图
2.1 水翼各截面压力p变化分析
针对υin=15 m/s工况水翼表面发生空化时A、B两部分各截面处的压力p、湍动能κ、速度分量u、v和w等参数变化进行分析。图3 所示υin=15 m/s时,翼型主流方向i位置的A和B 部分在一个周期内最大、最小和平均压力折线图。由图可知,A 部分截面的最大压力pmax和最小压力pmin随着截面呈现逐渐减小的趋势,即在A2~A4基本趋于平稳;A5~A11呈现逐渐下降。结合NACA6408 翼型结构以及在υin=1、5 和10 m/s工况下无空化现象,可以判定A1~A4压力下降不是截面面积变化造成的,而是受空化发展的影响。B部分截面的pmax和pmin在B1~B4间呈断崖式下降,原因是翼型结构的影响。B4~B11呈现上升趋势,上升过程波动幅度存在较大的差异。

图3 在υin =15 m/s时,11个不同截面位置的压力变化折线图
在0 ~2T/8 段,pav呈现大幅度上升,整体平均增加了12 kPa 左右,原因是因为空泡附着于翼型吸力面,且空泡占比很小,对流场影响较小,从而使pav逐渐上升;在3T/8 ~6T/8 段,B4~B11平均压力pav在降至最低后几乎不再变化,中间位置的截面压力维持在110 kPa左右,这是由于此时附着型空泡开始向钩状空泡转变,并且钩状空泡脱离翼型吸力面形成独立的空泡,此时为空化的核心阶段,压力整体处于低压状态;在7T/8 ~8T/8 时刻B1~B11的pav开始逐渐升高,并恢复至1T/8 的压力水平,这是由于脱落的空泡随主流流向下游并逐渐溃灭的原因。
综合分析图3 可知,A 部分截面的pmax、pmin和pav的波动幅值都明显大于B 部分,因此水翼翼型结构对压力脉动的幅值有着重要影响,空化显著的区域其压力脉动更加明显,可以利用压力脉动变化来探究空化现象特性。
2.2 各截面κ分布特性
图4 所示υin=15 m/s下A、B部分各截面κ折线图。由图可知,在一个周期内,A部分截面的κ几乎不存在变化,。此时流场A 部分截面相对稳定,可以排除翼型结构对κ的影响。B部分截面中,在B1~B5区段内湍动能随时间变化较小,流场相对稳定;而在B6~B11内湍动能变化较为明显,在B11处湍动能最大值增加至3.6 J/kg,说明B6~B11内部空泡的产生使得流场紊乱。空化发生区域在0 时刻湍动能变化明显,为空化初始阶段,此时流场相对紊乱,能量耗散大;在2T/8 和3T/8 时产生附着型空泡,流场相对稳定;4T/8至8T/8 时空化由附着型空泡向钩状空泡转化,在脱离翼型吸力面后最终溃灭,流场相对紊乱,能量耗散大,如图4 的B部分截面所示。
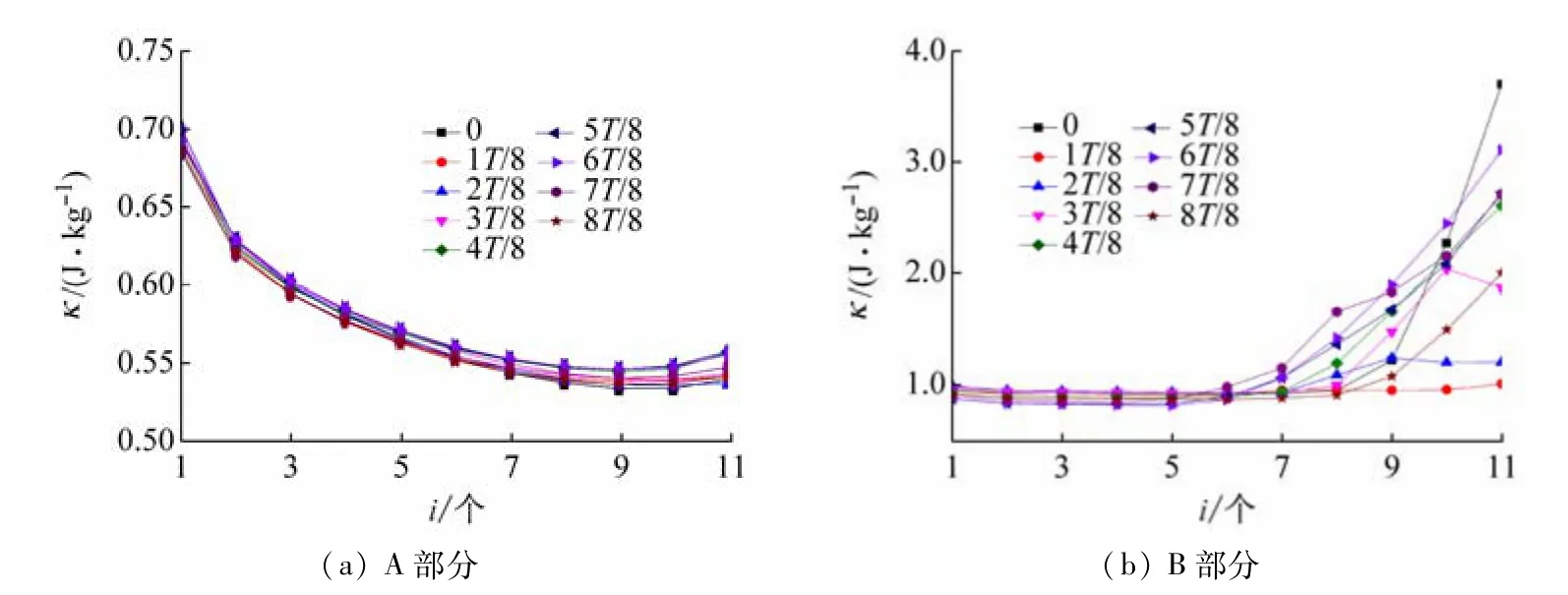
图4 在υin =15 m/s时,11个不同截面位置的κ变化折线图
因此,可看出湍动能代表流场的紊乱程度,空化的发生与湍动能大小有关,同时与翼型结构和回射流等有关。湍动能又随速度增加而增大,因此流场速度也是判断流场紊乱的因素之一。
2.3 水翼各截面速度分布
为了分析各截面的速度对流场脉动特性的影响规律,如图5 所示υin=15 m/s 下A、B 部分截面在同1个周期内X、Y、Z3 个方向的平均分速度u、v和w折线图。
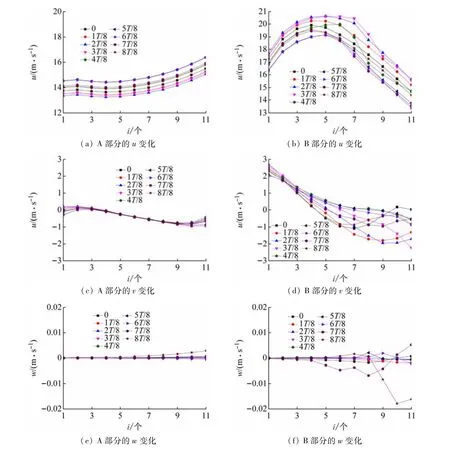
图5 在υin =15 m/s时,X、Y、Z方向11个不同截面位置的平均分速度变化
(1)A部分截面。X方向上A1~A3的主流方向速度u基本平稳;A4~A11间速度u有小幅度上升,原因是翼型截面积变化造成的影响。Y方向上速度v在A1~A4速度为正且变化缓慢,而在A5~A11间速度v方向为负且逐渐增大,原因是水流以较大的υin冲击翼型头部结构从而产生反方向的速度。Z方向的速度w基本维持在0 附近,整体比较稳定。
(2)B部分截面。X方向上B1~B4区间主流方向速度u逐渐增大;在B5~B11区间u逐渐减小且变化幅度较大,原因是翼型截面积变化以及空化现象的产生。Y方向上在B1~B4速度v为正且逐渐减小;在B5~B11速度v方向为负,原因是空化的产生形成复杂旋涡;随着时间推移,Y方向上速度零点的出现时间沿截面逐渐后移,说明产生的旋涡逐渐往后移动,证明了空泡的脱离并且向下游移动,B9~B11速度v方向为负且逐渐增大,主要是由于空泡随主流流向下游或者发生溃灭,导致Y方向速度v最后逐渐减小。Z方向上速度w维持在0 附近且有正有负,说明空化过程产生的旋涡并不是平面型,而是复杂的立体型旋涡。
综上所述,X主流方向速度u主要受υin的影响,Y和Z方向的速度v和w主要受空化过程的影响,速度方向发生改变说明有空泡的脱离、溃灭和立体型旋涡的产生。针对水翼空化过程的X、Y、Z3 个方向分速度分析是探讨空化现象特性的重要研究思路之一。
3 结语
本文基于计算流体动力学技术数值研究了NACA6408 水翼在绕流攻角4°时不同绕流速度工况的流场特性,通过数值分析υin=15 m/s下水翼空化发生过程,获得流场p、κ以及各方向分速度等参数的变化规律。结果表明:①随着进口速度的增加,各截面上的平均湍动能以及速度的波动幅值明显增加,压力、湍动能以及流场速度的变化与空化过程密切相关。②水翼空化发生区域压力、湍动能以及流场速度变化明显,水翼压力面以下区域的参数变化相对缓慢,水翼吸力面以上区域变化相对明显。压力面变化曲率较大导致进口水流流经翼型吸力面时流场相对紊乱。③在υin=1、5 和10 m/s工况时水翼表面不会产生空化现象,在υin=15 和20 m/s时发生空化,同时空化基本在B5~B11发生。④空化发生时非主流方向(Y和Z方向)的速度存在方向变换,形成了复杂的立体型旋涡。本文的数值计算结果对深入认识水翼空化演变机理,提高水翼抗空化性能具有重要的参考意义。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:35:14
化工管理(2022年11期)2022-06-03 07:08:24
海洋技术学报(2021年3期)2021-08-19 11:07:04
数字海洋与水下攻防(2021年2期)2021-05-08 08:01:26
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:20
机械工程师(2020年12期)2020-12-23 02:15:40
厦门理工学院学报(2016年1期)2016-12-01 04:50:53
系统工程与电子技术(2016年2期)2016-04-16 05:17:00
船海工程(2015年4期)2016-01-05 15:53:28
少年科学(2015年7期)2015-08-13 04:14:32