
ROV在海上吸力桩安装场景的应用及安装精度和风险控制
2022-06-03 07:08:24邱可深圳海油工程水下技术有限公司广东深圳518067
化工管理 2022年11期
邱可(深圳海油工程水下技术有限公司,广东 深圳 518067)
0 引言
本文以FPSO锚链固定、管汇安装基座固定、动态电缆或软缆位置固定等场景为背景,详细介绍了ROV(摇控无人潜水器)在吸力桩一般安装程序中的应用,阐述如何进行精度控制和安全风险控制,为以后的工程实践提供参考依据和作业指导。
1 吸力桩的应用场景介绍
海油工程中常采用的吸力桩是利用桩筒的内压和外部气压或水压的压力差将桩筒贯入海底的一种固定桩。安装吸力桩时,首先在自重作用下,根据海底的地层泥质情况,可以自由下沉一定深度,然后在ROV的介入下,利用吸力泵从桩筒内向桩筒外抽水,在封闭的桩筒内形成负压,继而产生了向下的推力,在桩筒向下的过程中,海底的泥土自然压入桩筒,进而完成吸力桩安装作业[1]。在回收吸力桩时,吸力泵反向工作,向桩筒内注水,使桩筒内压力大于桩筒外的压力,利用正压将桩筒内的泥土顶出,进而实现吸力桩的回收。
1.1 FPSO锚链海底固定
位于香港东南方向南海海域HYSY119 FPSO采用9条锚链固定,锚链的末端采用吸力桩固定方式。
1.2 动态电缆或软缆位置固定
在流花21-2脐带缆安装方案中,垂直方向的限位方式采用了吸力桩锚定的固定方式。
1.3 管汇安装基座固定
南海海域流花16-2管汇基座采用吸力桩固定方式。吸力桩安装精度要求艏向±2°、pitch±2°、roll±2°。
管汇吸力桩如图1所示。

图1 管汇吸力桩
2 ROV介入下的吸力桩一般安装程序
2.1 吸力桩的一般安装程序
文章仅介绍即吸力泵安装、吸力桩入水就位以及水下安装作业流程,不包括船舶、吸力桩、吸力泵、ROV等前期准备作业内容。
2.1.1 将吸力泵安装至吸力桩顶部
连接甲板测试动力单元至吸力泵本体,打开吸力泵固定插销和排水阀;吸力泵上系尾绳;主吊机起吊吸力泵;吸力泵调试人员乘坐工作吊篮通过辅吊机在空中观察吸力泵位置,引导主吊机将吸力泵导向缓慢插入吸力桩顶部法兰和吊耳板;吸力泵调试人员将Hot-stab插入吸力泵,启动甲板动力单元将固定锁销插入固定耳眼,完成吸力泵与吸力桩连接;吸力泵调试人员确认连接到位和密封合格之后,拔出Hot-stab放入吊篮回收至甲板;甲板人员协助吸力泵索具解脱,吸力泵安装完成。
2.1.2 解除待安装吸力桩甲板焊接固定
焊接人员切除固定吸力桩的全部海固;吸力桩开始起吊入水;如果吸力桩起吊过程中发现天气条件不满足吊装要求,应立即停止吊装作业,吸力桩返回原位,及时进行海固焊接(临时固定可以只进行一半固定)。
2.1.3 吸力桩起吊入水至水深50 m,水下检查吸力桩状态
当开始起吊吸力桩时,作业船需调整压载保证船体稳定性;吸力桩穿越飞溅区的过程中吊机的下放速度不超过0.1 m/s,防止速度过快引起较大的晃动;在吸力桩入水下沉过程中,由于桩筒内气体会慢慢排除,排除过程会引起一定程度的晃动,期间吊机手应注意其吊装荷载变化,及时调整下放速度;在吸力桩入水50 m水深时,ROV水下检查吸力桩吊装索具、吸力泵锁销和阀门状态、吸力桩初始倾斜度等。
2.1.4 ROV引导吸力桩初就位
吸力桩初就位过程中,一台ROV调整吸力桩的艏向,另一台ROV海床附近观察吸力桩灌入深度刻度值。吊机下放吸力桩至距海底30 m水深,速度不超过0.35 m/s;调整船位将吸力桩移至安装目标区上方;吊机开启升降补偿;吊机下放吸力桩至距海底3 m处;ROV1#抓住吸力桩上的把手调整桩的艏向,ROV2#通过摄像头观察牛眼监控吸力桩桩实时倾斜度数据;通过调整船位使吸力桩安装到设计位置[2]。距离海底3 m时确认以下几个数据是否满足要求:桩中心位置(通过LBL信标)、桩的倾斜度(通过牛眼)、吊机载荷(吊机读数)。
2.1.5 ROV操作吸力泵并监控吸力桩贯入过程
ROV插入Hot-stab启动吸力泵排水,将吸力桩贯入海床,实时监控桩内负压值,据此数据来调节吸力泵的功率。ROV1#进行吸力泵启动操作并实时监控吸力泵表盘数据;ROV2#在海床实时监控吸力桩贯入刻度数据;吊机切换至恒张力模式,保持设计张力;启动离心泵开始抽水,使吸力桩开始下沉;当离心泵压力不足以继续贯入时,切换至凸轮泵。
2.1.6 吸力桩贯入至设计深度,回收吸力泵
ROV1#操作吸力泵停止排水;ROV2#确认吸力桩艏向、倾斜度,贯入深度均满足要求;ROV1#打开吸力泵锁销;ROV1#断开Hot-stab与吸力泵的连接;ROV2#解开吸力桩的索具,主吊机回收吸力桩吊装索具至甲板;甲板人员将吸力泵的索具连接至主吊机,并下放至吸力吸力泵安装位置,ROV操作完成吸力泵与索具的连接;吊机回收吸力泵距海底20 m, ROV1#重新插入Hot-stab启动吸力泵吸水,进行吸力泵清洁工作。
3 吸力桩的安装精度控制
在海油工程应用中的吸力桩安装精度要求往往比较高,它会直接影响所连接的主体结构的安装精度,因此在具体施工过程中的精度控制极为重要。
3.1 位置精度控制方式
在海油工程中,常用的水下定位方式分为两种LBL(长基线)和USBL(超短基线)两种定位方式。因LBL具有高精度的特性常应用于水下结构物的精确就位和安装。吸力桩可以说是结构物的地基建筑,它的精度将直接影响上层结构物的精度,因此在进行吸力桩安装就位时,通常采用LBL定位方式。首先通过ROV携带SVP进行下水数据采集,然后ROV携带COMPATT进行LBL矩阵布置,定位人员再整合OCTANS、DVL、BEACON的数据进行校准,得出精确的位置数据。
3.2 吸力桩下放着泥与自沉精度控制
当吸力桩移至设计位置时,吊机缓慢下放使吸力桩自沉入泥约1 m的深度,ROV再次确认艏向、倾斜度、位置是否均在安装误差范围内;吸力桩入泥自沉过程中,为防止因土质松软导致吸力桩自沉过快而导致倾斜度偏差过大,需用吊机一直保持拉力,期间吊机载荷缓慢以1~3 t的数值递减完成自沉;吸力桩自沉过程中,监控并记录吊机载荷变化和安装数据(自沉深度、倾斜度、艏向、位置等),当艏向或桩水平度超出误差范围时,可通过调整船位和控制吊机来进行调整;当倾斜度控制在1°以内,自沉降深度基本符合设计要求时,可认为完成自沉降。
3.3 贯入过程精度控制
贯入过程ROV全程监控吸力泵面板上数据和牛眼度数,定位人员通过吸力桩上的罗经实时监控并记录吸力桩的艏向、水平度;吸力泵工作人员根据贯入压差曲线来调整吸力泵的压力和流量。流花16-2和流花20-2吸力泵差压曲线图如图2所示。
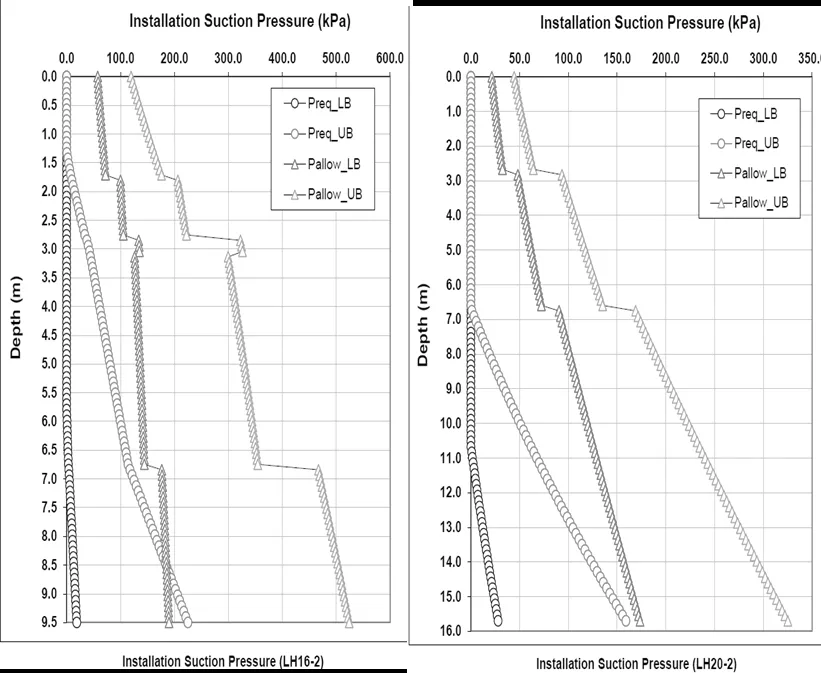
图2 吸力泵差压曲线图
4 吸力桩的安装过程风险与应对措施
4.1 安装位置偏移过大风险
吸力桩安装位置偏移过大时,需要回收出泥并重新就位。ROV启动吸力泵进行反向注水,并实时观察压力变化;吊机缓慢加载至吸力桩水下重量;吸力泵继续反向注水,缓慢增加吊机载荷至桩发生移动,记录此时泵的压力为Breakout over pressure;当桩移动时,将吸力泵的吸力降至Retrieval over pressure(LE)的建议值,如果桩可以移动,则保持此压力不变,完成吸力桩的回收,如果不行,则慢慢增大至Retrieval over pressure(HE)的建议值,进行吸力桩的回收;吊机配合吸力泵将桩从泥中拔出,回收至离海底10 m高;ROV检查吸力桩的状态;按设计要求桩重新至安装位置[3]。
4.2 吸力桩贯入过程中天气恶化风险
吸力桩安装作业前确定一个适合安装的天气窗口期,保证在此时间段内完成安装作业;恶劣天气来临之前应尽快完成吸力桩贯入,回收吸力泵;若受天气状况影响,来不及完全贯入,则停止贯入作业,ROV解脱吸力桩索具,打开吸力泵锁销,ROV水下连接吸力泵回收索具,协助吊机回收吸力泵至甲板;如果ROV水下解除吸力桩索具失败,则可通过ROV携带的软绳刀将4条软吊带剪断,从而完成索具的回收;若吸力泵锁销不能液压驱动脱开,则需要ROV使用机械方式脱开,然后回收吸力泵至甲板。待天气窗口合适之后,ROV重新在水下安装吸力泵,继续贯入作业。
4.3 吸力泵故障/失效
一般情况下,吸力泵内有离心泵和凸轮泵两种类型的泵,一台泵功能失效或故障时,可使用另一台泵继续进行贯入操作;若两台泵均不能完成贯入作业,则需要ROV去协助回收吸力泵至甲板进行维修,维修并测试合格后,重新下放安装到吸力桩顶部,继续贯入操作;若吸力泵的排水阀故障导致不能开始贯入操作,则需要回收至甲板进行相应的维修,待维修调试完成之后再行下水进行相关操作。
5 结语
吸力桩具有稳定性、可回收性、使用期限久等特点,在海油工程中的应用较为广泛,解决了水下结构物的固定问题。随着海洋工程的不断发展,吸力桩的应用场景将会越来越多元化,本文仅从管汇吸力桩安装角度出发,深入阐述ROV介入下的吸力桩安装程序、安装精度控制以及安装风险控制,帮助相关从业者了解吸力桩的安装特点,为以后的工程项目提供可靠的参考依据。
猜你喜欢
化工装备技术(2022年2期)2022-06-21 03:41:40
中国水运(2021年5期)2021-07-01 19:10:08
石油机械(2021年4期)2021-04-23 08:08:26
口腔颌面修复学杂志(2020年5期)2021-01-06 08:18:46
海洋工程(2016年4期)2016-10-12 03:21:26
中国海上油气(2015年1期)2015-07-01 17:37:45
锻造与冲压(2015年7期)2015-06-22 14:38:15
石油矿场机械(2014年4期)2014-09-07 10:35:56
中国石油和化工标准与质量(2013年7期)2013-04-29 23:13:53
河南冶金(2012年1期)2012-12-07 05:28:36
