基于CNN的轴承剩余寿命区间预测*
2023-08-31 03:24:54周明珠张艺宝孔丽军王梓齐
机电工程 2023年8期
周明珠,张艺宝,吴 双,孔丽军,王梓齐
(1.内蒙古霍煤鸿骏铝电有限责任公司,内蒙古 通辽 029200;2.湖南中融汇智信息科技股份有限公司,湖南 长沙 410221;3.浙江大学 控制科学与工程学院,浙江 杭州 310027;4.浙江大学 湖州研究院,浙江 湖州 313002)
0 引 言
随着煤化工产业的大规模发展,在环保技术方面的升级改造迫在眉睫。净化分厂的持续高效运行取决于设备的可靠性和智能化程度。针对设备的各类隐性及显性故障,需要开发智能监测预警及运维系统以指引设备的预防性维修。
滚动轴承作为旋转机械中的关键基础零件,其在净化分厂中得到了广泛的应用。滚动轴承将运转的轴与轴座之间的滑动摩擦转变成滚动摩擦以减小摩擦损失,轴承的健康状况将直接影响旋转机械的安全运行。为了提高设备的可靠性,对导致设备失效的故障隐患进行预测是至关重要的。故障预测与健康管理(prognostics and health management,PHM)是实现这一目标的有效技术,而RUL预测作为PHM的核心技术,是后续进行健康管理决策的基础。
RUL预测方法主要分为两类,即基于模型的方法和基于数据驱动的方法[1,2]。1)基于模型的方法是通过分析物理失效机制,建立描述机器退化过程的数学模型。但实际案例中,通常难以将其用于准确描述设备的物理失效机制,从而影响了退化模型RUL预测的准确性。2)数据驱动方法的预测准确性依赖于训练数据的数量和质量,受模型结构的限制较少。其中,深度学习方法由于具备处理复杂非线性数据的能力,得到了越来越广泛的应用[3]。
尽管基于深度学习的RUL预测研究取得了很大进展,但现有的大部分方法仅关注了RUL的点估计问题。在复杂的运行工况下,RUL预测可能会受到传感器噪声、建模不确定性及未来环境和工况的随机变化等因素的影响[4],这些因素带来的不确定性将大幅度降低点预测的可信度。因此,有必要对RUL预测中的不确定性量化问题展开深入研究[5]。
解决不确定性量化问题的传统方法是采用贝叶斯方法,即结合先验信息和新的观测内容进行后验推理。例如,将卡尔曼滤波器、粒子滤波器应用于RUL预测[6]。于震梁等人[7]采用支持向量机和非线性卡尔曼滤波相结合的方法预测了机械零件的RUL,得到了一定置信度的置信区间;但是状态更新方程的建立需要假设状态量与噪声项相互独立,在实际情况中往往难以满足该条件。焦自权等人[8]采用改进的粒子滤波方法,预测了锂离子电池的RUL,通过在状态方程中引入噪声项,进而考虑不确定性;但是由于方程中噪声项跟随状态量,无法直接考虑最终预测值中的不确定性。
传统的贝叶斯方法适用于较简单的系统,随着工业系统的结构日渐复杂,多工况、故障耦合等情况在实际运行过程中频繁发生,传统方法中构造的健康指标无法充分描述系统的特征信息。
近年来,由于深度学习方法具有强大的非线性拟合能力,将传统贝叶斯方法融入深度学习的BNN[9]这一研究方向受到了广泛关注。PENG Wei-wen等人[10]提出了BNN模型,在设计模型时将网络中的参数从数值转变为参数分布,从而进行了不确定性量化;但是计算过程中其采用变分推断进行简化,导致模型的准确度较低。胡城豪等人[11]通过引入高斯分布作为先验信息,使模型的准确性得以提升;但是其仍未解决计算量大的问题。较高的计算成本是限制BNN实际应用的主要因素。
另一类常用的不确定性量化方法是Bootstrap集成方法[12]。HUANG Cheng-geng等人[13]采用Bootstrap与深度卷积网络相结合的方法,对RUL预测中的不确定性进行了捕捉;但是该方法只考虑了数据不确定性,未对RUL预测过程中的模型不确定性进行分析。
笔者提出一种考虑不确定性量化的RUL区间预测方法,采用CNN构造预测模型,在模型中同时考虑数据不确定性与模型不确定性的量化;最后,采用轴承退化公开数据集进行实验,以证明该方法的有效性及优越性。
1 理论背景
1.1 卷积神经网络
卷积神经网络(CNN)最早应用于图像处理领域,具有局部感知、权重共享和池化3个特征。CNN在许多领域得到了应用,并获得了优越的性能,包括计算机视觉、自然语言处理、语音识别等。CNN是将卷积核与原始输入数据运算后提取特征,经过池化操作压缩数据和参数量、减小过拟合,从而通过交替堆叠来学习抽象的特征表示。
模型的输入为二维数据,其中,一维是特征参数,另一维是每个特征的时间序列。预测问题中的特征维信息来自轴承振动信号的时域特征,由于数据样本中空间相邻特征的关系不紧密,因此,笔者采用一维卷积操作[14]。
一维卷积操作的计算公式如下:
ci=f(ω·xi:i+FL-1+b)
(1)
式中:f为非线性激活函数;b为偏置项;ω为卷积核权重矩阵;xi:i+FL-1为经过长度为FL的滑窗得到的数据;ci为卷积核与某个滑窗内的序列数据计算后得到的特征。
笔者将卷积核应用于全数据序列的各个滑窗数据后,计算得到整体特征图c。具体计算公式如下:
c=[c1,c2,…,cn-Fc+1]
(2)
式中:Fc为卷积核大小;n为全数据序列经滑窗后的总数。
通常情况下,Fc越大,获得的结果越好,但是计算负担也更大。实验中,笔者折中选取Fc=10。
在CNN中,池化层通常紧随卷积操作之后,被用于提取每个特征图中重要的局部信息,并可显著降低特征维数,减少模型参数的数量。池化非常适合应用于高维问题,例如图像处理,但是这种操作在提高计算效率的同时过滤了部分有用信息。
实验中,由于RUL预测问题中原始特征的维度相对较低,CNN中将不采用池化层[15]。
1.2 不确定性量化
实际应用中,由于数据质量参差、模型存在预测误差等原因,RUL预测问题往往存在一些不确定性,可将其划分为两类,即数据不确定性与模型不确定性。
数据不确定性又叫任意不确定性[16],它产生于观测中固有的噪声。数据不确定性来源于噪声污染、测量误差和传感器技术限制等因素。这些因素一般是不可控的,所以数据不确定性无法随着数据量的增加、训练次数的提高而减小或消除[17]。
模型不确定性又叫认知不确定性,主要来源于模型结构和模型参数的不确定,本质是缺乏对模型的认识。不同于数据不确定性,其可以通过增加数据量和训练次数而使模型不确定性减小。
1.3 性能评价指标
在确保达到一定RUL预测准确率的同时,为了对预测过程中捕获的数据不确定性与模型不确定性进行量化,实验中采用区间形式输出预测结果。笔者选取以下3个指标对预测结果进行性能评估:
1)采用RMSE评价点预测的准确率。RMSE的计算公式如下:
(3)
式中:RULpred为RUL预测值;RULtrue为RUL真实值;i为预测点;N为预测点总数。
2)采用PICP评价区间预测的结果。PICP表示真实值落在预测区间上下界内的比率,计算公式如下:
(4)
式中:Ui为区间上界;Li为区间下界;当yi∈[Li,Ui]时Ci=1,否则Ci=0。
3)采用平均预测区间宽度(mean prediction interval width,MPIW)评价区间预测的结果。MPIW用于衡量预测区间的狭窄程度,较窄的区间相对较宽的区间具有更高的价值,计算公式如下:
(5)
2 RUL预测模型与不确定性量化
2.1 CNN预测模型
深度神经网络方法的特点是:根据网络结构,通过参数的学习与优化,逼近复杂的非线性函数,可以自适应地从原始输入信号中捕获信息。
模型的输入为包含时间维度和特征维度的二维数据,其中,特征是从轴承原始振动信号中提取的趋势性时域特征。笔者提出的RUL预测基础模型是一个5层的一维卷积网络。
模型的具体结构如表1所示。
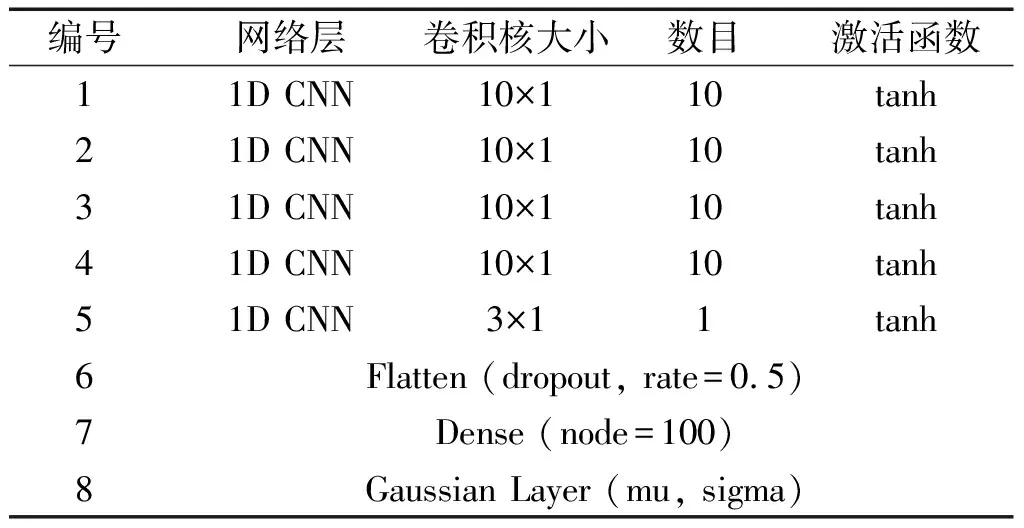
表1 卷积神经网络模型结构
CNN预测模型通过堆叠4个相同的卷积层进行特征提取,其采用全零填充方法保持特征维度不变,可得到多个与输入相同维度的特征图。该模型采用一个卷积核为3×1的网络层组合多个特征图,可获得原始特征的高级表示;之后,二维特征图被展平,并与全连接层连接,展平过程采用dropout方法以缓解过拟合;最后,在网络末端放置高斯层,并采用2个输出神经元,分别用于输出预测值及相应的不确定性。
2.2 数据不确定性
数据不确定性的量化是通过在网络输出层放置RUL的概率分布来实现的。笔者设RUL服从正态分布,设置网络的输出参数为(μ,σ),分别表示RUL的点预测值与不确定性大小。不同于点预测中仅输出最佳的预测值y*,基于CNN的区间预测方法的输出参数(μ,σ)是当RUL=y*时概率密度的最大值。
模型的训练过程是通过最大化似然函数调整网络权重和偏置项,从而获得最优输出。模型中RUL的概率分布表示如下:
(6)

训练目标是最大化上述概率分布函数。
在模型训练的初始阶段,由于参数离最优值较远,似然函数的变化相对较小,导致整体训练速度较慢。因此,笔者在实验中采用对数似然函数进行训练,使参数的变化率在最优值附近较小,远离最优值时较大,从而加快模型的收敛速度;同时,对数运算能够将分布中的乘法运算转换为加法运算,有利于反向传播过程的求导操作。
在执行上述优化操作后,模型的损失函数如下:
(7)
2.3 模型不确定性
LI Gao-yang等人[4]发现,模型不确定性可以采用模型方差表示;HU Chao等人[18]发现,采用更多数据训练基础学习器有助于减少预测偏差,而采用集成方法则有助于减少模型方差,即减小模型不确定性。
根据以上结论,基于CNN的区间预测方法,在整个数据集上采用均匀加权混合对模型进行集成,预测值和方差分别如下:
(8)
(9)
式中:M为集成模型的个数,实验中取M=10。
3 实验数据
3.1 数据集介绍
为了验证基于CNN的区间预测方法的一般性与有效性,笔者采用IEEE PHM 2012挑战赛提供的轴承加速寿命实验数据进行验证分析。
实验数据来自PRONOSTIA实验台,该试验台如图1所示。

图1 轴承加速退化PRONOSTIA实验台
轴承箱上装有2个加速度计,分别测量垂直和水平方向的振动。数据采样间隔为10 s,采样率为25.6 kHz,采样持续时间为0.1 s,即每次采样2 560个数据。
实验数据涉及3种不同的工况,且已完成训练集与测试集的划分。
PHM 2012轴承退化数据集如表2所示。
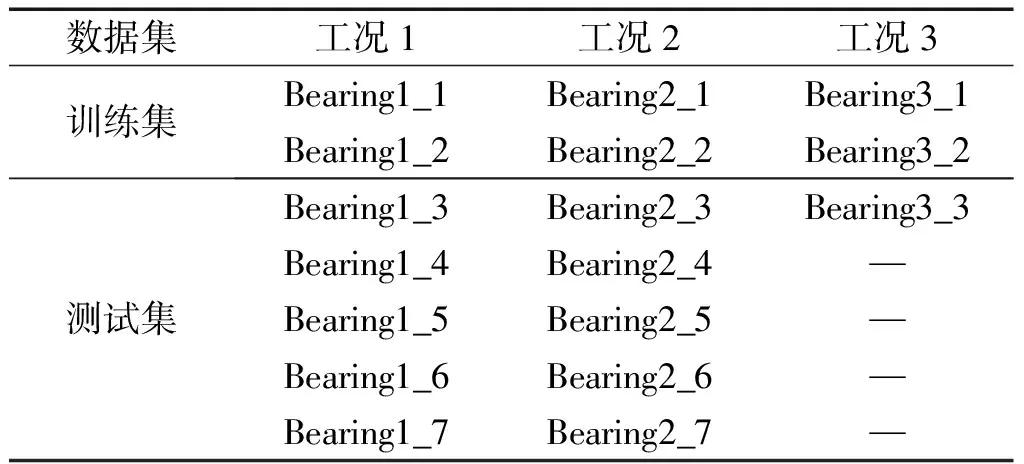
表2 PHM 2012轴承退化数据集
3.2 特征选取
在数据集中,传感器采集到的原始振动信号趋势性不强、特征不明显,且含有大量噪声,直接采用原始数据进行RUL预测的难度较大。因此,笔者对单个采样周期内的数据点进行时域计算,提取原始振动信号的7个时域特征作为RUL预测模型的输入。
笔者采用的时域特征分别为:裕度指标、峰峰值、均方根值、偏度、峰值因子、峭度指标和波形因子。相比于原始振动信号,提取后的时域特征呈现出更明显的变化趋势。
4 实验与结果分析
4.1 算法流程
首先,笔者对原始振动数据进行了预处理,提取相应的时域特征,然后将其输入CNN模型;其次,CNN模型的高斯输出层将输出RUL的点预测值μ和表示不确定性的参数σ2,实现RUL的点预测和数据不确定性的量化目的;最后,笔者采用集成方法进行了M次训练,得到M个CNN预测模型,均匀加权后得到了最终的预测结果,实现了模型不确定性的量化目的。
算法的整体流程如图2所示。
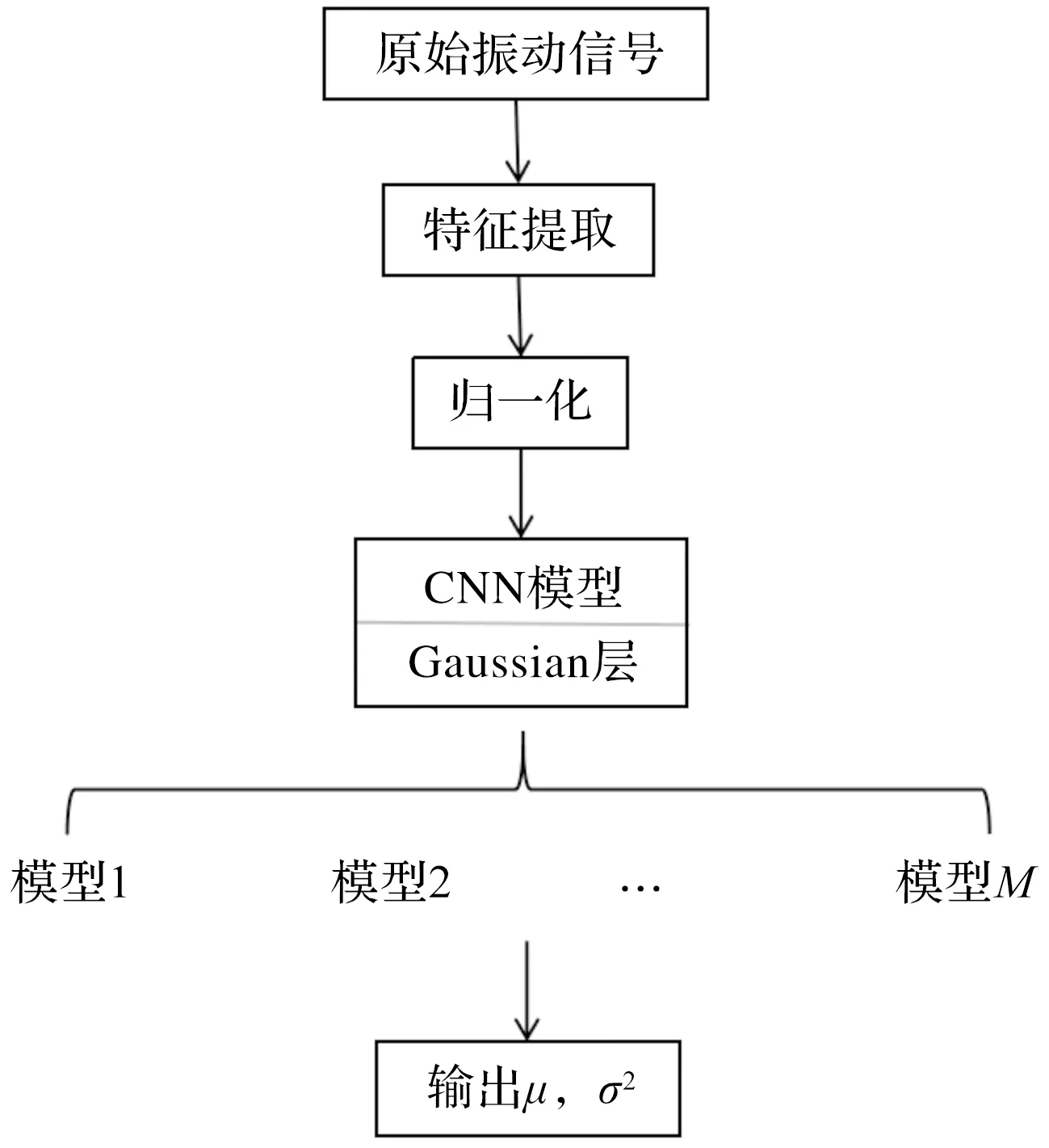
图2 算法流程框架图
数据预处理过程中,笔者对振动信号的时域指标进行最大最小归一化操作,计算公式如下:
(8)
式中:xmin为特征的最小值;xmax为特征的最大值。
4.2 实验结果分析
在PHM2012数据集上,笔者对基于CNN的区间预测方法进行实验。采用表2中工况1的训练集和测试集进行实验,选择x轴振动数据,并对其进行研究。
工况1中,轴承的转速恒定为1 800 r/min,通过径向施加4 000 N的载荷加速轴承损坏;当加速度计幅值超过20 g时认为轴承失效,停止采集数据。
在测试集上,仅考虑数据不确定性量化的预测结果如图3所示。
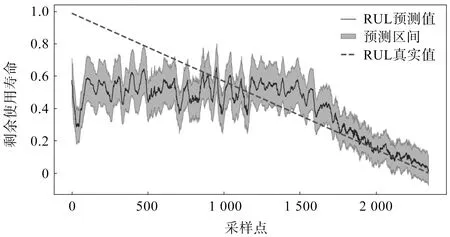
图3 仅考虑数据不确定性量化的预测结果
图3中:实线为RUL的点预测结果,虚线为真实RUL值,阴影区域描述了仅考虑数据不确定性量化的区间预测结果。
图3所示实验中,RUL点预测的RMSE值为0.209 6,区间预测的PICP值与MPIW值分别为0.533 2和0.213 4。
从图3中可以观察到:随着轴承退化接近末期,数据不确定性呈现减小的趋势。
在数据不确定性量化的基础上,预测模型增加了对模型不确定性的量化。考虑两种不确定性量化的预测结果如图4所示。
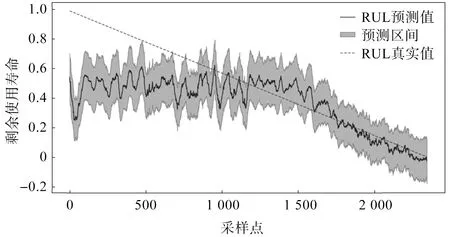
图4 考虑两种不确定性量化的预测结果
如图4所示:由于考虑了两种不确定性的共同作用,RUL的预测区间相较于图3宽度小幅增加,MPIW值为0.237 2。
图4中区间预测的PICP值为0.620 2、相较于图3有大幅提升,说明RUL的真实值落在预测区间内的百分比更大,对不确定性的描述更为准确,对实际的维护策略更有指导意义。同时,图4中的点预测结果也更为精确,RMSE值为0.199 7。
为进一步证明基于CNN的区间预测方法的优越性,在模型结构和参数相同的条件下,笔者将基于CNN的区间预测方法与贝叶斯不确定性量化方法得到的结论进行对比。
贝叶斯神经网络的预测结果如图5所示。
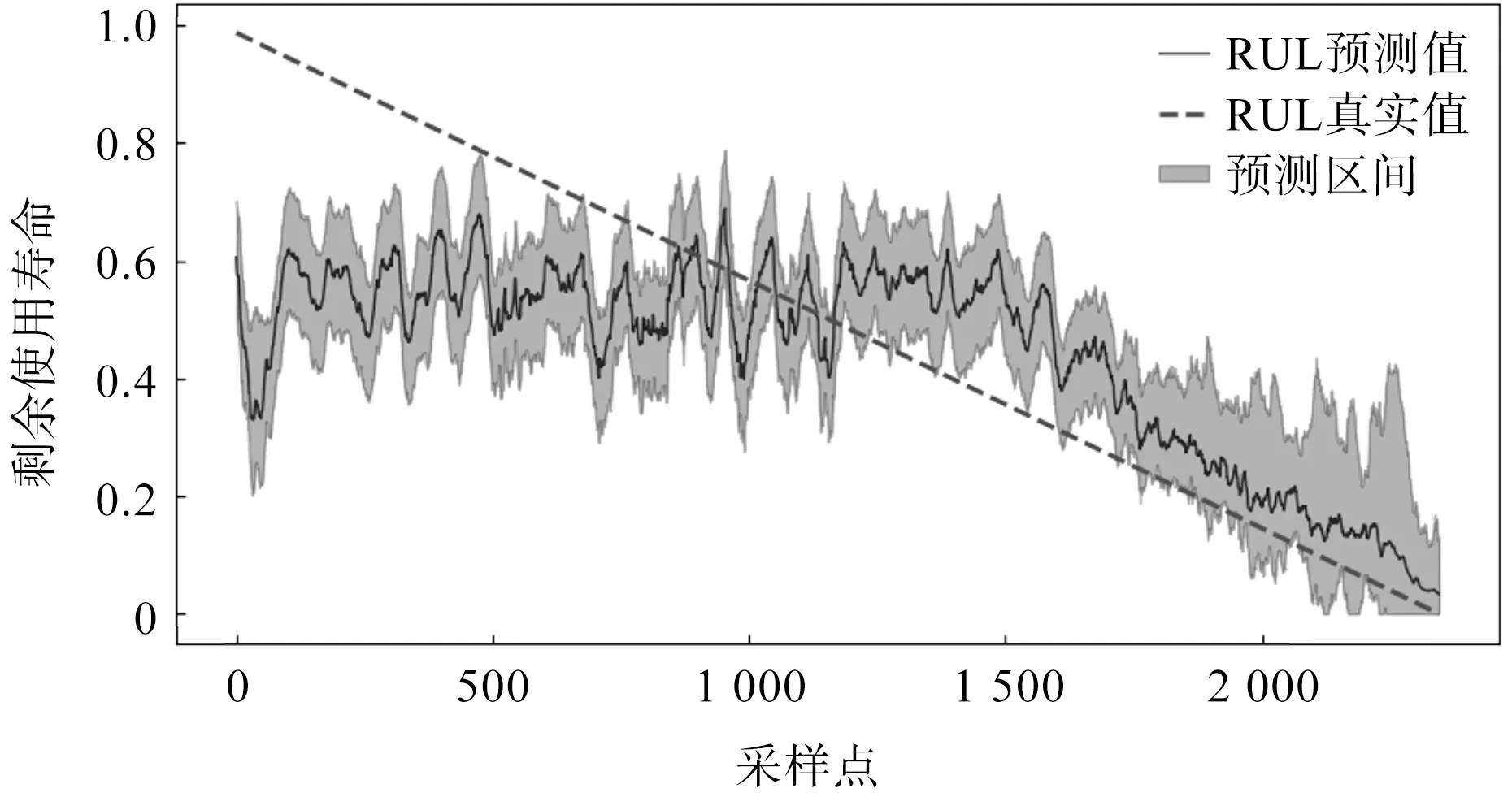
图5 贝叶斯神经网络结果
图5中:模型的RMSE、PICP、MPIW值分别为0.206 7,0.378 5,0.225 0。由于贝叶斯方法在不确定性量化过程中仅考虑了模型不确定性因素,尽管MPIW值小幅降低,但是其PICP值远小于基于CNN的区间预测方法的值。
上述结果说明:贝叶斯方法得到的预测区间范围对实际维护策略的指导意义相对较弱,点预测的准确率也相对较低。
不同区间预测方法结果汇总如表3所示。

表3 不同方法结果汇总
如表3所示:基于CNN的区间预测方法在保证点预测效果的同时,能够准确描述轴承退化过程中的不确定性,相比常规的不确定性量化方法有着更优越的性能。
5 结束语
笔者基于CNN模型,提出了一种量化RUL预测不确定性的区间预测方法,并采用PHM2012轴承退化公开数据集证明了该方法的有效性。
研究结果如下:
1)CNN可以充分提取轴承振动数据中的退化信息,为RUL预测提供了良好的基础,在输出层放置正态分布,可以在实现不确定性描述的同时,保证点预测的精度;
2)通过构建新型的损失函数,并采用集成方法,能够有效融合RUL预测过程中的数据不确定性和模型不确定性,可以得到良好的区间预测结果,更符合实际物理含义;
3)与现有的不确定性量化方法相比,基于CNN的区间预测方法的区间预测和点预测能力均更强,对于实际工程应用的指导意义更显著。
在下一阶段的工作中,笔者将进一步提升不确定性量化的准确程度,深入优化算法的结构和训练过程,以节约计算资源。
猜你喜欢
中学数学研究(广东)(2023年9期)2023-06-03 03:32:40
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:48
法律方法(2022年2期)2022-10-20 06:41:56
哈尔滨轴承(2022年2期)2022-07-22 06:39:32
哈尔滨轴承(2022年1期)2022-05-23 13:13:24
哈尔滨轴承(2021年2期)2021-08-12 06:11:46
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
中国外汇(2019年7期)2019-07-13 05:45:04
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:48