采煤机摇臂智能调高控制系统设计与功能实现
2023-08-31 09:34刘俊强
机械管理开发 2023年7期
刘俊强
(潞安化工集团山西新元煤炭责任有限公司, 山西 寿阳 045400)
0 引言
采煤机是煤矿生产中的关键设备,其主要任务是对煤层进行截割、落煤等任务,直接决定着综采工作面的生产能力。工作面煤层的条件不一致,主要表现为煤层厚度不一致,采煤机需根据煤层厚度对其摇臂进行自适应调节控制,即实现采煤机的自动调高。采煤机传统调高系统主要采用电磁换向阀实现其功能,但是在实际生产中不能够对其流量进行控制,从而很难适应在复杂工况下的控制要求,进而导致影响煤炭的采出率。针对此,将电液比例控制技术应用于自动调高系统中实现对采煤机摇臂的智能调高控制。具体阐述如下:
1 采煤机摇臂智能调高系统研究
在传统采煤机摇臂角度或滚筒高度控制中主要采用变量泵+电液换向阀相组合的方式进行控制,即对电磁换向阀开口大小以及开口方向的控制实现对采煤机滚筒调高速度、降低或升高等动作进行控制。上述调高系统在实际应用中存在以下不足:滚筒高度达到指定位置的响应速度较慢,在控制层面存在滞后性;在整个自动调高系统控制中稳定性不足,主要表现为超调量较大。
从理论上,采用电液比例控制技术可以提升采煤机的控制精度和自动化控制水平;该项技术实现的核心为电液比例方向,其器件具有性价比高、抗污染性能强的特点,特别适用于在恶劣环境且复杂工况下的使用要求。对于电液比例控制技术的应用可以分为闭环控制和开环控制两种;工业实践表明,闭环控制效果明显优于开环控制效果。因此,本文采用电液比例方向的闭环控制策略实现对采煤机滚筒的自动调高,控制原理如图1 所示。
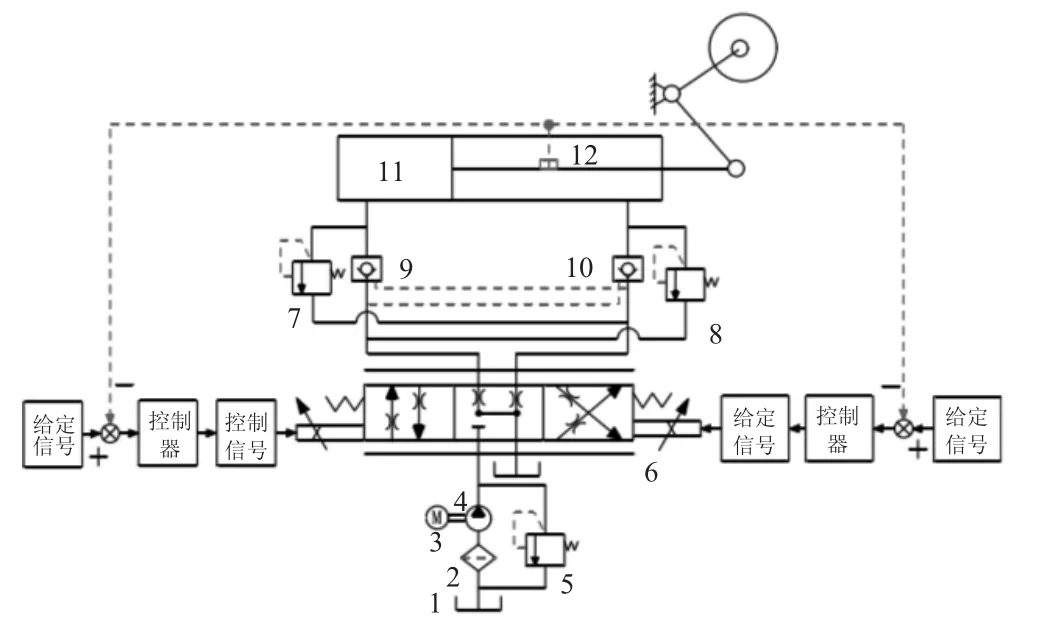
图1 电液比例滚筒自动调高系统
2 采煤机摇臂智能调高系统的关键元器件选型
电液比例方向阀、调高油缸以及位移传感器为滚筒自动调高系统的关键元器件[1-2]。其中,电液比例方向阀根据控制需求对滚筒的升高或降低的动作进行控制;调高油缸为滚筒调高或降低的直接执行部件;位移传感器为对液压油缸活塞杆伸缩量进行监测,为实现闭环控制提供依据。结合采煤机滚筒在实际生产中自动调高的功能需求,本系统所选型的器件如表1 所示。
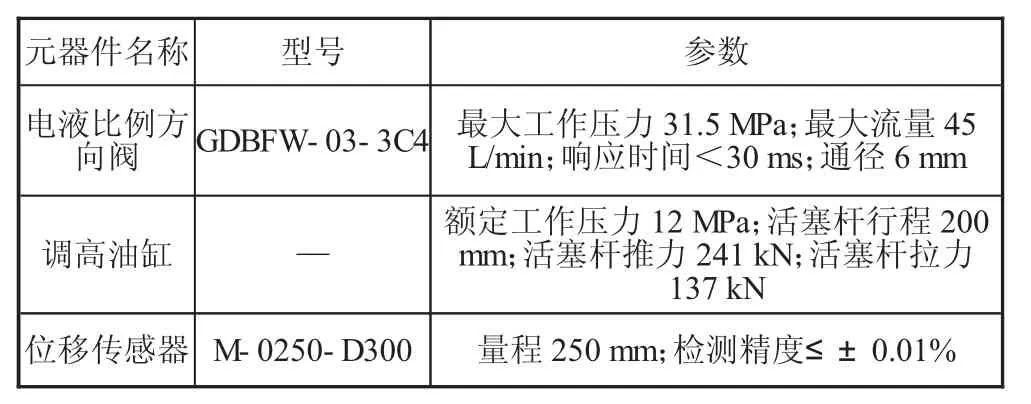
表1 采煤机自动调高系统关键元器件选型结果
3 采煤机摇臂智能调高控制策略研究
采煤机自动调高系统的电液比例控制,其在核心元器件硬件做支撑的基础上,还需采用可靠、稳定且高效的控制策略,最终达到快速响应、低超调量的稳定控制系统。PID 控制策略为当前工业生产中应用效果评价较高的控制系统。针对采煤机滚筒的自动调高控制需求,拟采用PID控制策略为基础实现其功能[3-4]。
3.1 采煤机摇臂的智能闭环控制
根据采煤机自动调高系统闭环控制的控制器、功率放大器、电液比例阀、调高油缸以及位移传感器的数学模型,并基于闭环控制的原理框图建立采煤机滚筒自动调高系统的传递函数;根据滚筒自动调高系统中各元器件的参数对传递函数的参数进行幅值,得出基于PID 控制器的电液比例自动调高系统的传递函数如图2 所示。
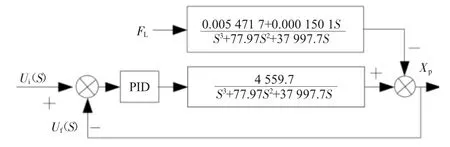
图2 采煤机摇臂智能调高控制系统的传递函数
3.2 不同控制策略的仿真模型搭建
PID 为自动调高系统的控制基础,包括有常规PID 控制器和单神经元控制器。对于PID 控制理论而言,重点是根据控制对象及控制要求的不同确定其中比例、积分以及微分环节的系数。对于PID 控制器而言,上述三个参数确定后无法根据工况条件对其进行实时调整;而单神经元控制器可根据采煤机的实际工作条件以及煤层条件对三个参数进行实时在线调整,从而提高对自动调高系统的控制精度。
因此,为达到对采煤机滚筒调高系统的最佳控制效果,本系统拟采用单神经元控制器对其进行控制,基于单神经元控制器的仿真模型如图3 所示。
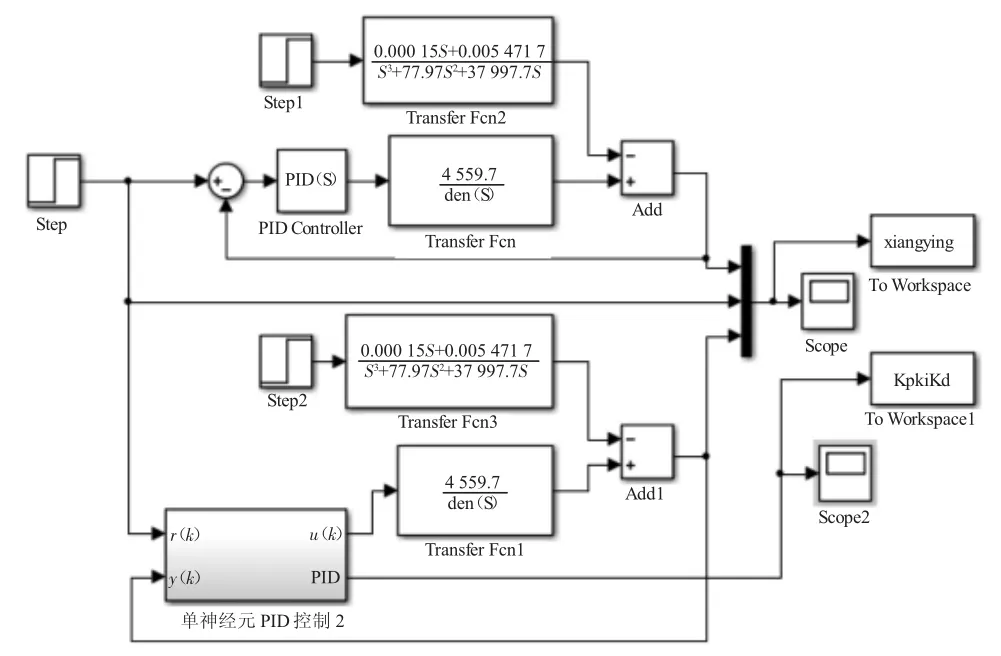
图3 单神经元控制器仿真模型
3.3 不同控制策略控制效果对比
根据采煤机的工况条件和煤层条件,对基于传统PID 策略下参数的设置如下:比例环节系数为3;积分环节系数为1,微分环节系数为0.01;基于单神经元PID 控制策略可对上述系数进行实时在线调整[5]。两种控制策略下系统的采煤机滚筒自动调高系统的响应速度和控制过程的稳定性对比如图4 所示。
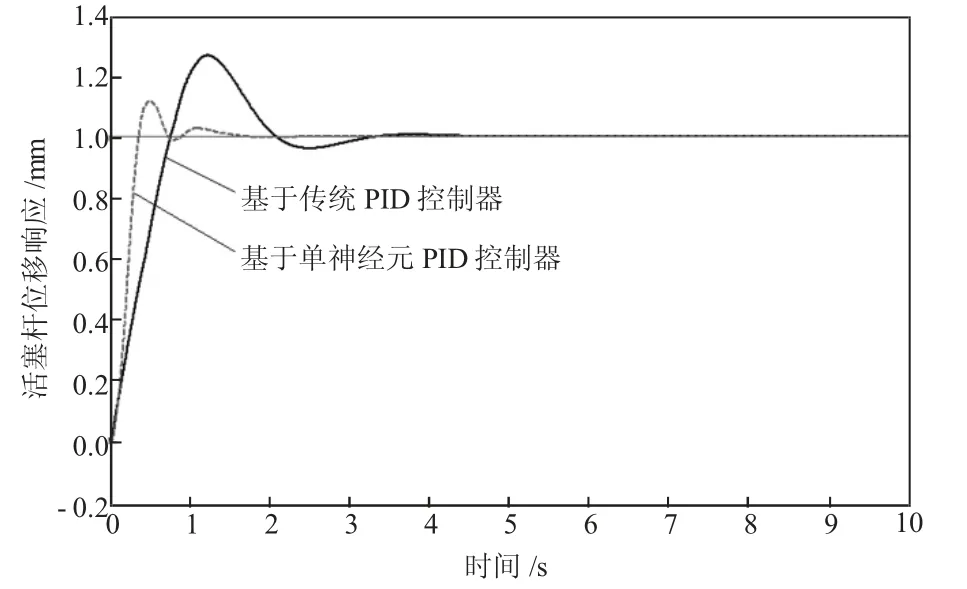
图4 不同控制策略对应的控制效果对比
如图4 所示,基于传统PID 控制策略自动调高系统达到预定控制效果所需时间为4.5 s,在控制过程中的最大超调量为0.24 mm;基于单神经元PID 控制策略自动调高系统达到预定控制效果所需时间为1.5 s,在控制过程中的最大超调量为0.1 mm。
对比可知:基于单神经元PID 控制策略可以比传统PID 控制策略更快的达到预定的控制效果,而且控制过程更加稳定。同时,当在控制过程中遇到负载突变的工况时,基于单神经元PID 控制器能够更快消除负载突变工况所带来的影响,其具有更高精度的控制效果和稳定性。
4 结语
采煤机为煤矿综采工作面生产的核心设备,其需要根据煤层变化和底板变化对其滚筒高度进行调整控制,以保证对煤层的全部截割,从而保证采出率。传统基于电磁阀的自动调高系统控制精度低、响应速度慢以及稳定性差的问题;为此,本文提出了基于电磁比例方向阀为核心的电液比例自动调高系统,并采用单神经元PID 控制策略实现其功能。经仿真分析可知:单神经元PID 控制器的电液比例自动调高系统具有更高的控制精度和稳定性,尤其是可以解决在突变工况对系统造成冲击的问题。
猜你喜欢
金属加工(冷加工)(2023年1期)2023-02-04
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2022年5期)2022-06-06
化工管理(2021年7期)2021-05-13
再生资源与循环经济(2021年7期)2021-04-09
装备制造技术(2020年3期)2020-12-25
水泥工程(2020年4期)2020-12-18
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
河南工学院学报(2017年1期)2017-06-07