机器人辅助腹腔镜联合胃镜切除胃间质瘤的手术配合体会
2023-08-29 09:53刘捷王钧
机器人外科学 2023年6期
刘捷 王钧
摘 要 目的:总结2例达芬奇机器人辅助腹腔镜联合胃镜行胃间质瘤切除术的手术配合,提出护理配合要点。方法:术前将达芬奇机器人手术系统、内镜系统在手术间合理规划布局,完善手术器械及耗材准备。术中巡回护士妥善安置患者体位,采取预防压疮、保温等护理措施,准确对接Trocar与机器臂系统,关注手术进程,做好突发事件的应急准备。术后做好管道管理、医疗器械和废弃物处理。结果:经过医护团队的密切配合,2例患者在达芬奇机器人辅助腹腔镜与胃镜联合技术下均顺利完成手术,无中转开腹手术,未出现术中低体温、压力性损伤等相关并发症,未发生切口感染。结论:手术护理配合过程中要明确机器人辅助手术的关键流程及风险环节,做好手术护理安全管理。
关键词 机器人辅助手术;胃间质瘤;胃镜检查;护理
中图分类号R735.2 R473.6 文献标识码 A 文章编号 2096-7721(2023)06-0561-06
Cooperation experience in robot-assisted laparoscopic and gastroscopic resection of gastric stromal tumors
LIU Jie, WANG Jun
(Operating Center, Tianjin Peoples Hospital, Tianjin 300120, China)
Abstract Objective: To summarize the nursing cooperation experience of 2 cases of robot-assisted laparoscopic and gastroscopic resection of gastric stromal tumor. Methods: The Da Vinci robotic surgical system and endoscopic system were properly planned and arranged in the operating room before surgery, the surgical instruments and consumables were well prepared. Patients bodies were properly placed by the circulating nurses during the operation, nursing measures such as preventing pressure sore and keeping warm were taken. Make sure that Trocars and robotic arms were connected accurately. Be well prepared for emergencies during operation. Results: With the close cooperation of the surgical team, robot-assisted laparoscopic and gastroscopic surgeries were successfully performed in the two patients without conversion to open surgery. No intraoperative hypothermia, pressure injury, incision infection or other related complications occurred. Conclusion: The key procedures and risk factors in Da Vinci robot-assisted surgery should be defined, and the safe management measures should be done well.
Key words Robot-assisted surgery; Stromal tumor; Gastroscopy; Nursing
收稿日期:2022-12-09 錄用日期:2023-05-04
Received Date: 2022-12-09 Accepted Date: 2023-05-04
基金项目:天津市人民医院科研项目(2021TJHL032)
Foundation Item: Scientific Research Project of Tianjin Peoples Hospital (2021TJHL032)
通讯作者:王钧,Email:13132069059@163.com
Corresponding Author: WANG Jun, Email: 13132069059@163.com
引用格式:刘捷,王钧.机器人辅助腹腔镜联合胃镜切除胃间质瘤的手术配合体会[J].机器人外科学杂志(中英文),2023,4(6):561-566.
Citation: LIU J, WANG J. Cooperation experience in robot-assisted laparoscopic and gastroscopic resection of gastric stromal tumors [J]. Chinese Journal of Robotic Surgery, 2023, 4(6): 561-566.
胃肠道间质瘤(Gastrointestinal Stromal Tumor,GIST)是最常见的间叶性肿瘤,患病率10%~20%,其中70%左右的GIST发生在胃[1]。由于间质瘤很少发生淋巴转移,目前手术方案仅要求完整切除瘤体,而不包括常规的淋巴结清扫[2]。
近年来,胃间质瘤的外科研究主要集中在微创手术和快速恢复[3]。达芬奇机器人手术系统具有图像清晰、操作臂灵活、远程操纵等优点,有助于患者减小切口、减少平均住院時间、降低感染概率、减少失血量[4]。近期的研究也表明机器人辅助手术与开腹及腹腔镜手术相比具有潜在优势[5]。本文提出了一种结合胃镜技术的新GIST入路,即在机器人辅助手术中进行胃镜检查定位,在达芬奇机器人辅助腹腔镜下行胃间质瘤切除术。该技术不仅使手术定位精准、瘤体切除精细彻底,还减少了术中出血,缩短了手术时长及住院时间,符合微创外科和快速康复理念。现将手术配合报道如下。
1 临床资料
1.1 一般资料
病例1:患者男性,65岁,因间断上腹部不适3年余,加重伴腹痛3月,使用药物治疗无效而入院。患者无发热,偶有烧心,无反酸嗳气,无恶心呕吐,无呕血黑便。胃镜检查提示胃底黏膜隆起、贲门炎、慢性浅表性胃炎、胃多发息肉,病理检查示胃体间质瘤。完善术前相关检查,患者无明显手术禁忌证,行手术治疗。术中胃镜定位于胃底大弯侧前壁,可触及质硬肿物,手术中无穿孔,未放置腹腔引流管,手术时间为100 min,出血量为50 ml。
病例2:患者男性,61岁,因间断上腹部不适4年余,加重伴右上腹痛6月,使用药物治疗无效而入院。患者无发热,偶有烧心,无反酸嗳气,无恶心呕吐,无血便。行胃镜检查提示胃体黏膜隆起、贲门炎、慢性浅表性胃炎,病理示胃体间质瘤。完善术前相关检查,排除手术禁忌证,行手术治疗。术中通过胃镜和机器人手术系统探查肿瘤位置,为胃体肿瘤。术中无穿孔,未放置腹腔引流管,手术时间为90 min,出血量75 ml。
2例患者在机器人辅助腹腔镜联合胃镜下行胃楔形切除术,均顺利完成手术,无中转开腹,术后安返病房,未发生压力性损伤等相关并发症,未发生切口感染。
1.2 手术方法
采用气管插管全身麻醉成功后,患者取仰卧位,常规皮肤消毒后铺巾,取脐下弧形切口约1 cm切开皮肤,气腹针进入腹腔,连接气腹机建立气腹。置入8 mm Trocar后进镜探查,见穿刺口下无穿刺副损伤,再分别于右侧腋前线、左侧锁骨中线、左侧腋前线约脐水平处置入8 mm Trocar,建立机器人操作通道,右侧锁骨中线平脐水平置入10 mm Trocar作为辅助操作孔。调整机器人机械臂,固定镜头、双极电凝、超声刀、抓钳器械,将机器人镜头臂置入脐下戳孔,依次探查肝、胆、脾、小肠、结肠,未见明显器质性改变及转移灶。术中胃镜定位于胃底、胃体交界处大弯侧前壁,可触及质硬肿物,直径均为2 cm。结合术前检查,术中诊断为胃底/胃体黏膜下肿物,遂行机器人辅助腹腔镜胃镜联合胃楔形切除术。术中在胃镜定位肿瘤处提起胃壁,吻合器(Endo GIA)将肿瘤连同周围部分正常胃壁组织一并切除,切除过程中使用胃镜反复确认,保证残胃腔通畅,标本自10 mm Trocar取出。胃镜下检查切割处无活动性出血、无渗漏,检查腹腔内无活动性出血,清点器械辅料无误后用可吸收线间断缝合腹壁各切口,敷料贴覆盖伤口。手术顺利,复苏室待患者全麻清醒后安返病房。
2 护理
2.1 术前准备
2.1.1 术前访视
2.1.1.1 心理护理:机器人辅助手术是一项先进的微创技术,患者对新型手术缺乏足够的了解,容易出现紧张、焦虑、担心手术的风险等表现,因此巡回护士在术前1 d访视患者,详细了解患者职业、文化水平等一般情况,评估患者及家属的状态,主动介绍手术配合经验并指导患者在各阶段的配合要点,减轻其顾虑[6]。为了使患者对新技术有直观感受,可借助达芬奇机器人手术图片、视频进行术前宣教,说明该手术与传统腹腔镜手术相比具有创伤小、失血量少、术后疼痛轻及住院时间短等优势,从而增强患者及家属自信心及安全感,提高患者对手术应激的反应能力,减轻患者的心理压力及焦虑情绪。
2.1.1.2 术前评估:现场评估患者全身情况,询问有无手术史、过敏史;查看肢体活动程度、皮肤营养情况,检查患者皮肤清洁情况。因达芬奇机器人辅助手术通常在脐区做小切口穿刺进行气腹针及Trocar置入,而脐孔部凹陷于体表,皮肤娇嫩,污垢较多,不易清洗,因此应检查患者脐孔的清洁状况,以保证手术安全。
2.1.2 物品准备
①辅料类:机器人手术辅料包、手术衣、手术治疗巾;②器械:手术碗盆、腔镜器械等;③常规用物:消毒纱布、腔镜纱布、纱布垫、吸引器管、11#刀片、手套、外科缝针及丝线、负极板等;④特殊用物:机器人专用镜头(30°)、机器人专用无菌臂套及摄像头套、机器人Trocar、校对器、Hom-o-lok夹、超声刀线、机器人超声刀、机器人专用双极线、机器人双极抓钳、普通抓钳、针持、保温杯等;⑤胃镜、无菌硅油油球;⑥备用的开腹敷料及外科器械等。
2.1.3 机器人手术系统准备
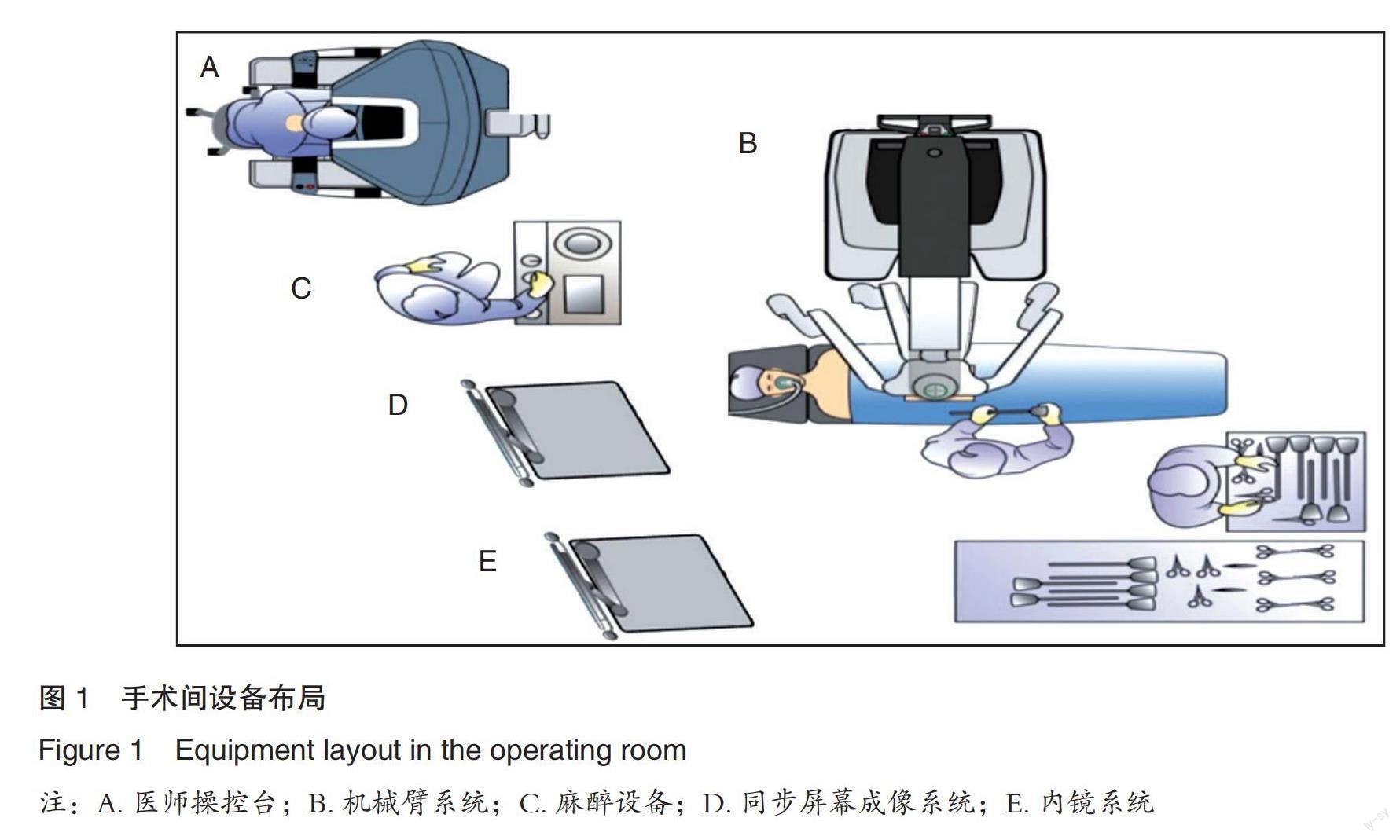
达芬奇机器人手术系统由3部分组成:医生操控台、床旁机械臂系统、成像系统[7]。巡回护士术前1 d依据拟行的手术术式与手术医师、麻醉医师一同规划手术间布局,麻醉机放于患者左侧床头位置,床旁机械臂系统放于患者左侧位置,屏幕成像系统及气腹机、超声刀等辅助设备放于患者右侧床头位置,医师操控台放于无菌区域外,以防止术中人员走动时误碰操控台(如图1)。
2.1.4 内镜系统准备
巡回护士术前1 d将内镜系统推至手术间,与达芬奇机器人屏幕成像系统同放于病人右侧床头位置。手术当日开台后,由手术室辅助护士将消毒后的胃镜送至手术间待使用。
2.1.5 患者准备
患者取平卧位,右上肢固定血压袖带后约束于患者身旁,左上肢建立静脉通路并连接三通管。将左上肢外展,注意外展角度不能大于90°,便于术中静脉观察及管理,同时留置导尿并妥善固定。
2.2 术中配合
2.2.1 器械护士配合
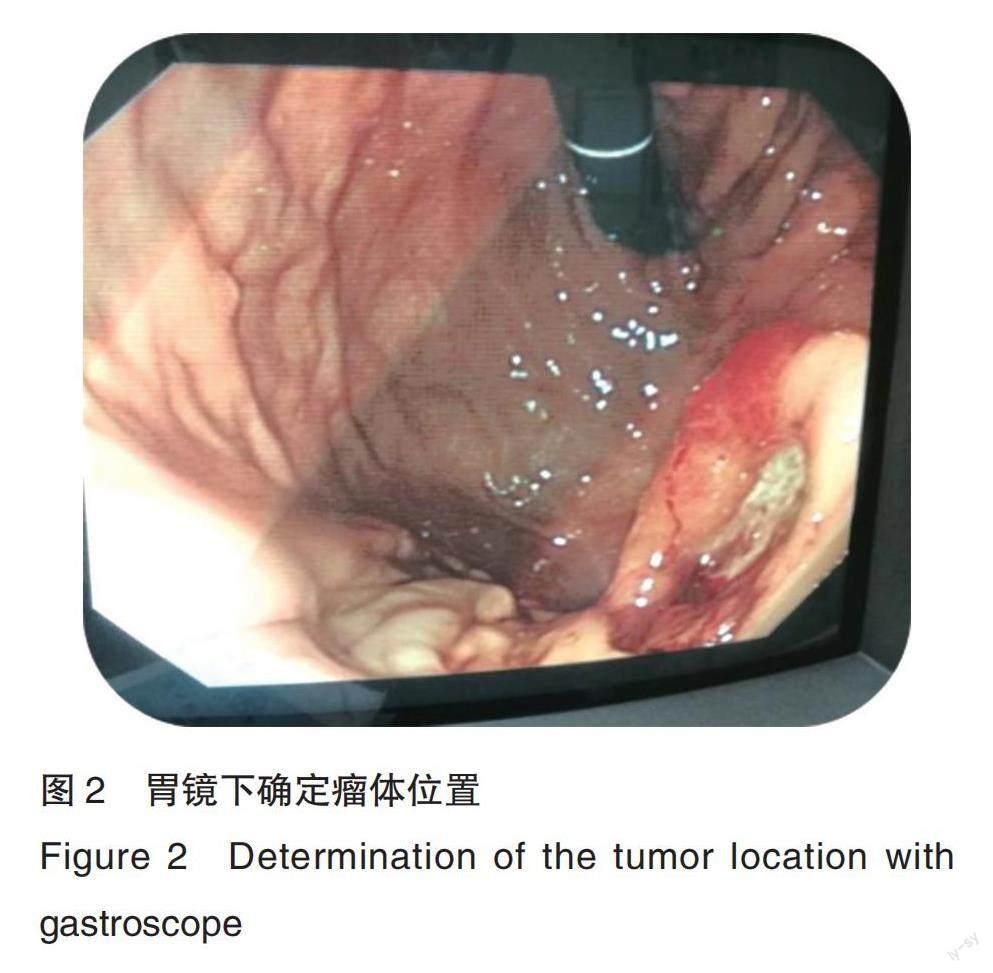
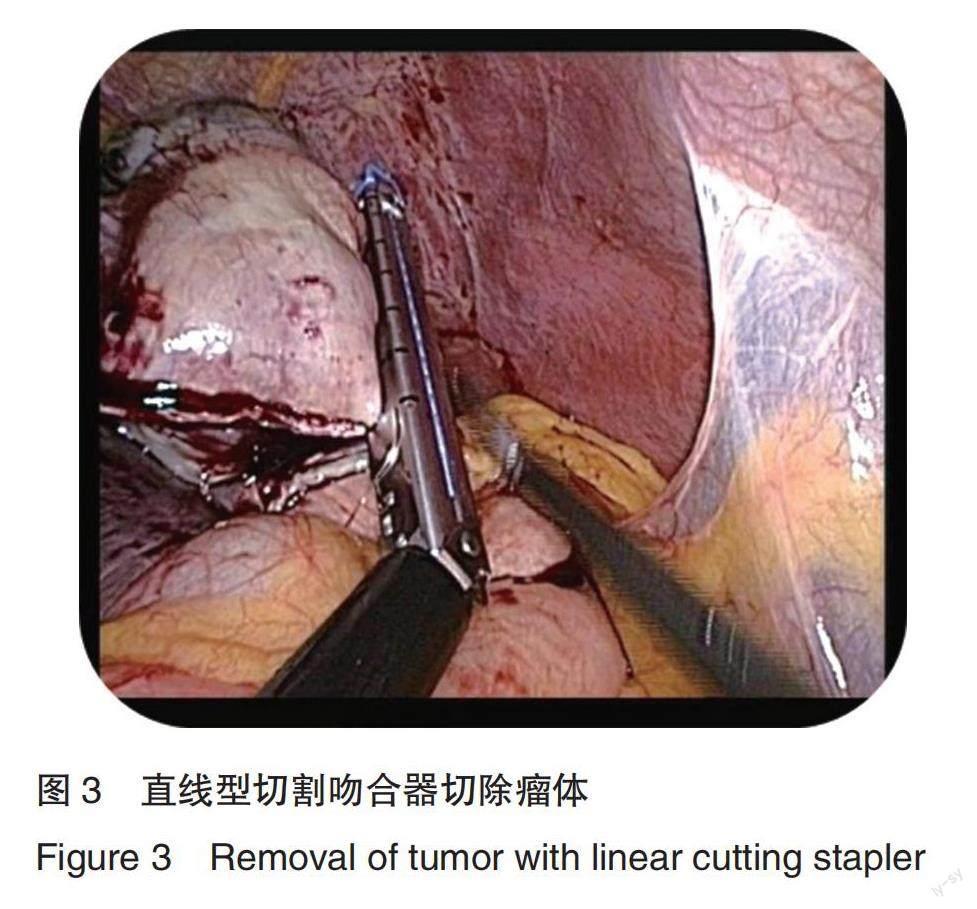
器械护士于术前1 d将手术所需的器械及物品准备齐全。手术前30 min刷手,与巡回护士共同清点用物,并配合将无菌保护套分别套于立柱和4个机械臂上,全程保证周围的无菌屏障。协助医生消毒并铺置无菌单,再次三方核对患者信息无误后,与巡回护士配合完成镜头线、单极线、双极线与设备的连接。传递尖刀在脐下做1 cm切口,使用穿刺机器人专用8 mm Trocar作为达芬奇机器人镜头观察孔,建立气腹,分别于右侧腋前线、左侧锁骨中线、左侧腋前线约脐水平置入机器人专用8 mm Trocar,于右锁骨中线平脐水平置入10 mm Trocar作为助手辅助孔。对接机械臂时,注意机械臂与患者之间的距离,避免磕碰患者。用40 ℃~60 ℃灭菌水清洗擦拭镜头防止镜头模糊影响手术视野,进镜观察,电剪、双极电凝抓钳上如有焦痂会影响电凝效果,应及时用湿纱布将焦痂予以去除。医生经咬口插入胃镜,胃镜下定位肿瘤位置(如图2),经辅助孔置入腔镜直线切割闭合器,于肿瘤下方夹住胃壁,此时胃镜下观察肿瘤是否完全被包含在直线型切割吻合器内,激发闭合器后(如图3),胃镜下再次观察肿瘤是否完全切除。利用机器人镜下缝合的优势行残端浆肌层包埋。于辅助孔置入标本取出器,将标本置于标本袋内取出。镜下观察有无出血,与巡回护士共同清点用物,无误后请主刀医生将机器臂下的钳端闭合后取出,最后撤出镜头,缝合戳孔,用无菌敷贴覆盖伤口。协助医生包扎伤口,清洁手术区域皮肤。
2.2.2 巡回护士配合
在患者进入手术间前,巡回护士连接好达芬奇机器人手术系统电缆线,开启电源开关,按下3个主机中任一主机开关钮开机,开关键显示蓝色即为开机,机器人系统开机后进行自检,确保机器人正常运行。患者进入手术间后,麻醉医师、手术医师、巡回护士三方共同核对患者信息及手术部位标识,左上肢建立静脉通路,右上肢固定于患者身旁。协助麻醉医师进行气管插管及全身麻醉,插管前将一次性胃镜咬口置于患者口内上下齿之间,麻醉医生行气管插管,插管后尤其注意配合麻醉医师将气管插管固定于咬口的口角一侧,为术中置入胃镜留有空间,防止患者做胃镜检查时咬坏胃镜管体,使患者更加安全、舒适的完成胃镜检查,也能让医生更加仔细、顺利地完成检查。为预防患者发生压疮,应采取保护性措施,做好术中患者的皮肤护理,于患者足跟部、骶尾部、肩胛部、枕部等骨隆突处,覆盖亲水性敷料予以减压,同时使用柔软且抗压性较强的体位垫保护受压部位,双眼使用眼贴进行保护。术中采用加温毯实施保温措施,于患者双下肢、颈肩部采取脚套和肩套覆盖保温,减少皮肤暴露。手术医生皮肤消毒铺单后,巡回护士正确连接成像系统和操作仪器,调节光源强度,校准白平衡,调节视频清晰度,使其处于最佳状态;协助器械护士连接手术台上的器械,将超声刀、高频电刀调至所需大小,调节气腹压力10~14 mmHg(1 mmHg=0.133 kPa)[8],不能超过15 mmHg,应从低流量逐渐调至高流量,防止气腹压力上升过快过高,引起高碳酸血症和心律失常等并发症[7],一旦气腹压力过高,应及时向手术医生汇报,减小气腹压力或暂停手术。由于机器人手术系统庞大的无菌器械臂需要在立体空间内频繁选位、旋转、移动,增加了无菌管理的难度,因此巡回护士要创建安全有效的无菌屏障,与器械护士共同套机械臂无菌套时要保持四周有效距离,以保证无菌区域不被污染。之后,将机械臂显示屏ANATOMY调整为上腹部。巡回护士在手术医师指引下将机器人机械臂系统推至手术床左侧,将机械臂置于手术野,要求机器人系统的中心柱、手术区域、观察孔3个点在同一条水平线上。对接时注意机械臂与患者之间的距离,避免磕碰。机器人设备地面上线路较多,应将线路梳理清晰,防止术中断电或绊倒手术间人员。协助医生置入胃镜,注意胃镜置入过程中协助麻醉医生保护好气管插管,以免脱管造成麻醉意外。严密观察患者生命体征变化,及时提供所需物品。
2.2.3 突发事件应对
据文献报道,手术机器人可能发生半路死机、机器人机械臂停顿、机械臂夹住人体组织无法松脱、损坏人体健康器官及电流触击患者的情况,需及时处置或改行开放手术[9],这要求手术室护士必须具有基本的故障识别与应急处理能力。当镜头臂上提示灯为黄色时表示错误可恢复,当镜头上提示灯为红色时表示错误不可恢复,此时应按医师操控台上右侧控制面板上的紧急停止键,停止一切操作,并联系厂家工作人员进行维修。本研究中未发生手术相关突发事件。
2.3 术后整理
巡回护士检查胃管、尿管是否通畅并妥善固定,排空尿量,将尿量告知麻醉医生。患者离开手术间前由麻醉医生、手术医生、巡回护士再次三方查对。展开机器人手术平台的每个机械臂,从臂件的后部向前部翻转,撤除无菌保护罩,一次性耗材毁形处理并记录相关信息后置于医疗垃圾中,彻底清洁机械臂上残留污迹,收拢STOW按钮收起机械臂,移至固定放置区域,“S”形回收各种导联线,关闭系统。术后仪器应用清水擦拭,不可用腐蚀性强的消毒剂擦拭,以保护設备。手术器械传递于消毒供应中心,按照机器人手术器械的清洗、消毒流程进行处理。
3 小结
手术护理配合过程中要明确达芬奇机器人辅助手术的关键流程及风险环节,做好手术护理安全管理。建立机器人手术专项小组,专人管理,固定手术间、固定位置。手术开始前,确保有备用的无菌保护套,以应对无菌屏障的破坏。无菌区外要有足够的空间,以确保机器人手术平台的正确定位。手术室护士术前应与手术医师、麻醉医师全面沟通,评估患者的心理状况并做好相应护理,掌握手术方式及手术体位,保证手术设备、器械的合理、高效使用,协助做好胃镜咬口、全麻插管及胃镜的安全管理,在手术中充分评估术中可能出现的意外,为手术顺利进行打好基础。手术团队应全面统筹,合理地配合手术,并且应从传统手术护理配合中找出机器人辅助手术特殊的护理配合关键点,手术配合紧跟外科手术团队的整体步伐,在手术飞速发展的进程中,真正体现手术室护理配合的价值和作用。
参考文献
[1] LV M Z, WU C X, ZHENG Y, et al. Incidence and survival analysis of gastrointestinal stromal tumors in Shanghai: a population-based study from 2001 to 2010[J]. Gastroenterol Res Pract, 2014. DOI: 10. 1155/2014/834136.
[2] Bertolini V, Chiaravalli A M, Klersy C, et al. Gastrointestinal stromal tumors-frequency, malignancy, and new prognostic factors: the experience of a single institution[J]. Pathol Res Pract, 2008, 204(4): 219-233.
[3] CAO L, ZHENG K M, WANG H L, et al. Laparoscopic and endoscopic cooperative dissection for small gastric gastrointestinal stromal tumor without causing injury to the mucosa[J]. Gastroenterol Res Pract, 2019. DOI: 10.1155/2019/7376903.
[4] 孙莹, 张彬.达芬奇机器人辅助下经口甲状腺切除术的护理配合与体会[J].护士进修杂志, 2018, 33(14): 1307-1310.
[5] 池诏丞, 程龙伟, 姜晶.达芬奇机器人手术系统在直肠癌侧方淋巴结清扫中的应用进展[J].中华结直肠疾病电子杂志, 2020, 9(2): 122-126.
[6] 陈育贞, 徐哲, 曾庆兵, 等.达芬奇机器人系统应用于小儿肾积水的术中配合体会[J].中山大学学报(医学科学版), 2017, 38(3): 475-480.
[7] 黄理嘉, 周亚芬.机器人辅助下全膀胱切除术加回肠代膀胱术的手术护理配合[J].护士进修杂志, 2019, 34(19): 1804-1807.
[8] 《机器人肝胆胰手术操作指南》制定委員会.机器人肝胆胰手术操作指南[J].临床肝胆病杂志, 2019, 35(7): 1459-1471.
[9] Murphy D G, Sundaram C P. Comparative assessment of three standardized robotic surgery training methods[J]. BJU Int, 2013, 112(6): 713-714.
猜你喜欢
中华养生保健(2020年7期)2020-11-16
经济技术协作信息(2018年20期)2019-01-19
现代养生·下半月(2016年5期)2017-01-09
中国卫生(2016年2期)2016-11-12
中国实用医药(2016年19期)2016-08-05
中国实用医药(2016年18期)2016-08-03
中国实用医药(2016年4期)2016-02-23
中国实用医药(2016年2期)2016-01-05
中国中医药现代远程教育(2014年20期)2014-03-01
中国中医药现代远程教育(2014年15期)2014-03-01