机器人辅助腹腔镜手术在妇科疾病中的应用
2023-08-29 08:56:47李道云徐云芮小慧
机器人外科学 2023年6期
李道云 徐云 芮小慧
摘 要 目的:比较机器人辅助腹腔镜手术与传统腹腔镜手术治疗妇科良恶性肿瘤的临床疗效,探讨机器人辅助手术的利弊。方法:选择2020年5月—2022年3月在常州市第一人民医院妇科接受达芬奇机器人辅助腹腔镜手术的46例患者作为研究组,随机筛选出同时间段接受传统腹腔镜手术的46例患者作为对照组。采集两组患者的基本信息及围手术期的观察指标后进行统计分析。结果:两组患者的基本资料(年龄、身体质量指数、基础疾病、既往手术史、疾病类型)比较,差异均无统计学意义(P>0.05)。两组患者术中及术后各项指标(手术时间、术中出血量、术后排气时间、腹腔24 h引流量、术后住院时间、抗生素升级率及疼痛评分)比较,差异有统计学意义(P<0.05)。两组淋巴清扫数目比较,差异无统计学意义(P>0.05)。结论:达芬奇機器人辅助腹腔镜技术可以在妇科良性和早期恶性肿瘤等疾病中广泛开展,其短期疗效结果优于传统腹腔镜手术。
关键词 机器人辅助手术;腹腔镜;妇科疾病
中图分类号 R608 R713 文献标识码 A 文章编号 2096-7721(2023)06-0540-09
Application of robot-assisted laparoscopic surgery in gynecological diseases
LI Daoyun, XU Yun, RUI Xiaohui
(Department of Gynecology, the Third Affiliated Hospital of Soochow University/Changzhou First Peoples Hospital,
Changzhou 213003, China)
Abstract Objective: To compare the clinical efficacy of Da Vinci robot-assisted laparoscopic surgery and conventional laparoscopic surgery in the treatment of gynecological benign and malignant tumors, and to explore the advantages and disadvantages of Da Vinci robot-assisted laparoscopic surgery. Methods: 46 patients who underwent Da Vinci robot-assisted laparoscopic surgery from May 2020 to March 2022 in the Department of Gynecology, Changzhou First Peoples Hospital (The Third Affiliated Hospitals of Soochow University)were selected into the study group, and 46 patients who received the conventional laparoscopic surgery under the same scope of surgery during the same period were randomly selected into the control group. Basic information and perioperative observation indexes of patients in the two groups were collected for statistical analysis. Results: No significant differences on the basic information (age, body mass index, underlying diseases, past surgical history and disease types) of patients between the two groups were found (P>0.05). Intraoperative and postoperative indicators (operative time, intraoperative blood loss, postoperative exhaust time, abdominal drainage in 24 hours, postoperative length of stay, antibiotic escalation rate and pain score) of the two groups of patients were compared, and the differences were statistically significant (P<0.05). However, no statistically significant difference (P>0.05) was found on the number of lymph node dissection between the two groups. Conclusion: After initial exploration in our center, it was found that Da Vinci robot-assisted laparoscopic technology could be widely applied in gynecological benign diseases and early malignant tumors. Da Vinci robot-assisted laparoscopic surgery showed superiority over conventional laparoscopic surgery on short-term efficacy.
Key words Robot-assisted surgery; Laparoscope; Gynecological disease
收稿日期:2022-04-01 录用日期:2022-11-24
Received Date: 2022-04-01 Accepted Date: 2022-11-24
基金项目:常州市卫生和计划生育委员会科技项目(201807)
Foundation Item: Science and Technology Project of Changzhou Health and Family Planning Commission (201807)
通讯作者:芮小慧,Email:ruixiaohui1@126.com
Corresponding Author: RUI Xiaohui, Email: ruixiaohui1@126.com
引用格式:李道云,徐云,芮小慧. 机器人辅助腹腔镜手术在妇科疾病中的应用[J]. 机器人外科学杂志(中英文),2023,4(6):540-548.
Citation: LI D Y, XU Y, RUI X H. Application of robot-assisted laparoscopic surgery in gynecological diseases[J]. Chinese Journal of Robotic Surgery, 2023, 4(6): 540-548.
随着人们对微创外科手术精准度要求的提高,机器人手术系统应运而生。国外内窥镜手术器械控制系统的主要设计理念是希望通过微创技术实施复杂的外科手术[1],这不仅能满足当前患者追求的治疗效果,而且保障了手术伤口愈合程度和美观度。传统腹腔镜手术的适应证虽然很广泛,但其在心胸外科、泌尿外科、普外科、妇科领域中的应用仍存在着较大的局限性,如肥胖症、脏器间的严重粘连、多科室协作手术等。2000年美国食品药品监督管理局批准达芬奇机器人手术系统应用于泌尿外科和心脏外科手术,2005年该系统又被批准应用于妇科手术,该系统的应用提高了手术视野的辨识度和手术操作的精准度。自2019年常州市第一人民医院引进达芬奇机器人手术系统以来,各外科手术科室逐步开展了机器人辅助腹腔镜手术。目前,本院妇科已对46例患者开展了达芬奇机器人辅助腹腔镜手术,主要用于治疗妇科良性肿瘤及早期恶性肿瘤,现将其手术效果及安全性报道如下。
1 资料与方法
1.1 临床资料
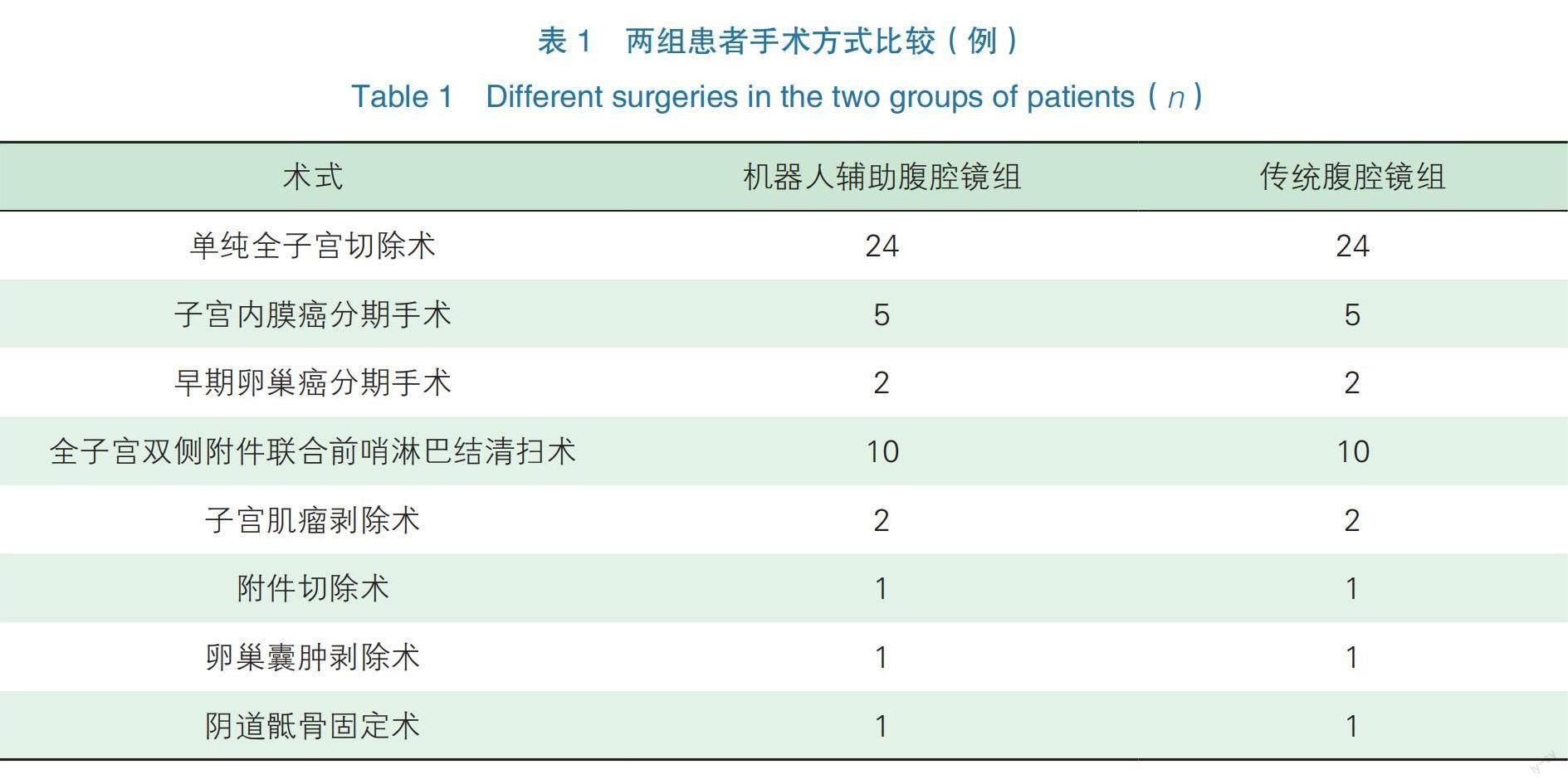
通过检索常州市第一人民医院电子病历系统,输入关键词“机器人辅助操作”“妇科”,导出数据为2020年5月—2022年3月接受达芬奇机器人辅助手术的病例共46例作为研究组。参照检索出的达芬奇机器人辅助手术的病例资料,再次检索电子病历系统,随机筛选同时间段相同手术范围接受传统腹腔镜手术的病例共46例作为对照组。在本中心,达芬奇机器人辅助技术主要应用于全子宫切除术、子宫肌瘤剥除术、卵巢囊肿剥除术、附件切除术、阴道骶骨固定术、子宫内膜癌根治术、早期卵巢癌根治术。因该系统具有独特的3D荧光系统,故也可用于前哨淋巴结活检术。术前与患者沟通,取得患者充分的知情同意,并充分告知腹腔镜微创手术与机器人辅助腹腔镜手术的风险与受益及其他备选的治疗方式。达芬奇机器人辅助腹腔镜手术组纳入标准:①早期恶性肿瘤,术前有组织病理学助诊;②宫颈癌前病变,术前有组织病理报告提示“高级别上皮内肿瘤”;③子宫内膜癌前病变,术前内膜活检病理结果提示“子宫内膜非典型性增生”;④良性肿瘤持续存在或逐渐增大,影响生活质量;⑤患者已明确知晓手术费用并有强烈自我意愿选择机器人辅助手术;⑥术前评估患者各项检查检验指标均基本正常,并可耐受手术,无明显的手术禁忌证;⑦可适应头低脚高体位。传统腹腔镜手术组纳入标准:①参照机器人辅助腹腔镜手术的病种及术式随机筛选入组;②早期恶性肿瘤及癌前病变:在术前均已取得相应的病理组织学确诊;③良性肿瘤持续存在或逐渐增大,影响生活质量;④既往接受妇科手术次数少,术前排除重度粘连可能;⑤有良好的心肺功能,能耐受全身麻醉手术;⑥患者希望进行微创手术治疗,有美观要求。所有患者手术前均已签署手术知情同意书,且已通过常州市第一人民医院伦理委员会的审核。
1.2 方法
1.2.1 手术团队
达芬奇机器人术者、一助及护士均接受了规范化培训,并已取得合格证书。术者为拥有较丰富腹腔镜及开腹手术经验的主任医师,第一助手为有较丰富的腹腔镜下手术经验及具备随时处理术中意外情况能力的副主任医师,手术室器械护士为专业的机器人手术组护师。目前我院机器人术者基本固定为同一人,且一助相对固定。
1.2.2 机器人辅助腹腔镜手术体位
达芬奇机器人辅助腹腔镜手术46例患者取截石位,头低脚高后与地面呈45°,床调至最低,肩部予以肩托包裹防止坠落,臀部超出手术床缘6 cm左右,双腿分开约90°,两侧大腿部放于截石位腿架上,留置导尿管,大腿与地面水平平行,左足尽量压低。患者背部有保温毯、硅胶垫(防止压疮),各大关节处以棉垫固定,装机过程及术中需调节机械臂的位置,避免挤压到患者身体。
1.2.3 机器人装机步骤及手术方法
根据子宫大小及手术范围,镜头孔在脐孔左2 cm、脐上1~4 cm处,在脐孔水平线上左右两侧距镜头孔8~10 cm处各行一个8 mm穿刺孔,镜头孔置入3号机械臂,其他两孔置入2号和4号机械臂,充CO2建立气腹,腹压控制在12 mmHg。助手、巡回护士及台上护士进行常规机器人装机。术者于医生控制台精准控制各个机械臂;一助于右侧髂前上棘斜向上2 cm处行第4穿刺孔,操纵腹腔镜辅助器械,以便必要时辅助术者的操作;二助则需配合完成举宫等操作。宫颈癌前病变及宫颈早期癌症患者予简易举宫器举宫。子宫内膜癌及良性子宫肿瘤予举宫杯及举宫器舉宫。手术方式按照恶性肿瘤FIGO分期行相应手术治疗(全子宫双侧附件或双侧输卵管切除和/或全面淋巴清扫术和/或大网膜切除术),对Ⅰ期子宫内膜癌患者根据内膜病灶大小、术中快速病理或前哨淋巴结的显影情况决定手术范围。对宫颈癌前病变患者均行全子宫切除术。子宫肌瘤、卵巢囊肿则行全子宫切除、肿瘤病灶剥除术和/或附件切除术。
1.2.4 传统腹腔镜术前准备及手术方法
需行子宫切除的患者均取膀胱截石位,其余患者行平卧位,调至头低脚高,予以全身麻醉,导尿。于脐上缘穿刺12 mm切口作为腹腔镜镜头孔,常规建立CO2气腹,腹压控制在12 mmHg,然后进入腹腔镜,于左、右侧麦氏点处进行5 mm套管穿刺,为第2和第3穿刺孔。在耻骨联合上缘2 cm左侧旁开2 cm处做5 mm切口作为第4个穿刺孔。放置完毕后探查盆腹腔。传统腹腔镜手术的具体手术步骤与达芬奇机器人辅助腹腔镜手术基本相同,手术涉及的腹腔镜器械主要是强生超声刀、单双极电凝设备及无创抓钳。
1.2.5 观察指标
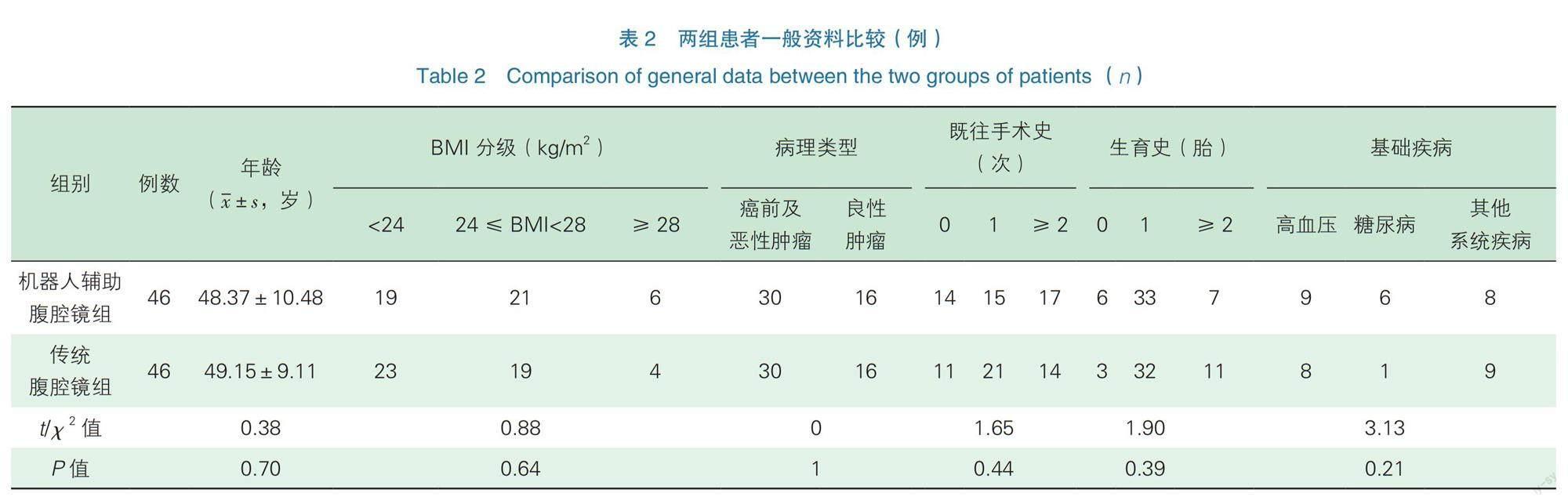
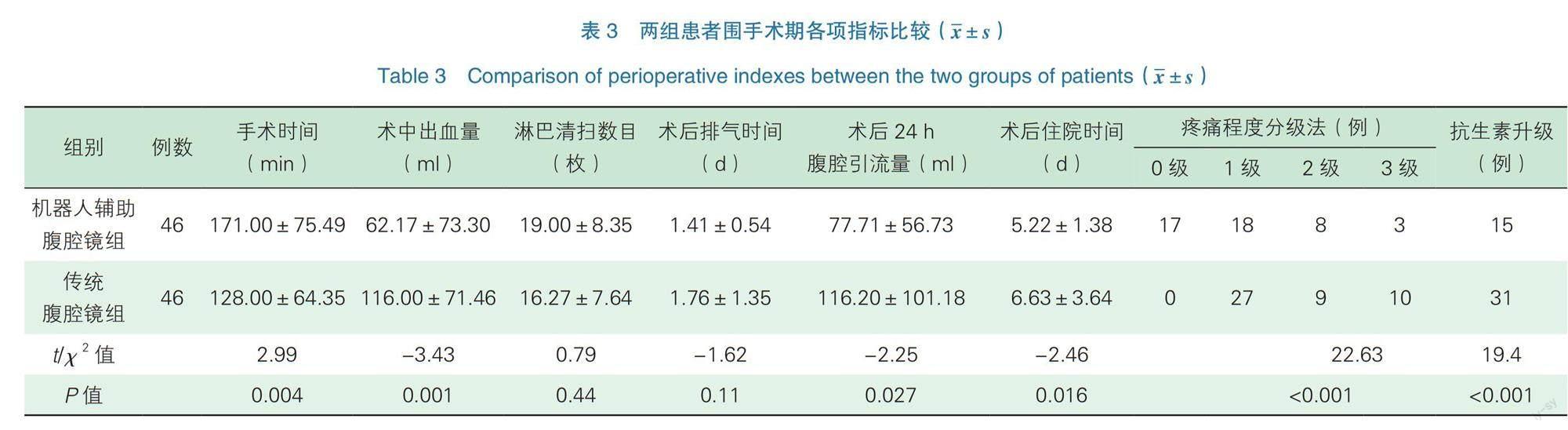
观察指标包括手术时间(从切皮开始计时,到皮肤切口缝合完毕)、术中出血量(术中负压吸引量-腹腔冲洗液量+湿血纱布的重量-干纱布的重量)、术中和术后严重并发症发生率及清扫淋巴结数目、术后24 h腹腔引流量、术后疼痛分级、术后排气时间、术后抗生素升级率及术后住院天数。疼痛分级采用主诉疼痛程度的分级法,即语言描述评分法(Verbal Rating Scale,VRS),将疼痛划分为4级。0级:无疼痛;Ⅰ级(轻度):有疼痛但可忍受,生活正常,睡眠无干扰;Ⅱ级(中度):疼痛明显,不能忍受,要求服用镇痛药物,睡眠受干扰;Ⅲ级(重度):疼痛剧烈,不能忍受,需用镇痛药物,严重影响睡眠。中国肥胖问题工作组设定了中国人的体质量指数(Body Mass Index,BMI)标准:18 kg/m2 1.2.6 统计学方法 所有数据采用SPSS 22.0统计学软件进行分析。计量资料以均数±标准差(x±s)表示,采用独立样本t检验;计数资料以“例(%)”表示,采用 χ2检验。以P<0.05为差异具有统计学意义。 2 结果 2.1 两组患者一般资料比较 机器人辅助腹腔镜手术组及传统腹腔镜手术组患者所行手术种类的临床资料见表1。机器人组患者平均年龄为(48.37±10.48)岁,对照组患者为(49.15±9.11)岁。机器人组患者平均BMI为(24.71±3.89)kg/m2,对照组患者为(24.36±3.12)kg/m2。按照BMI<24 kg/m2、28 kg/m2>BMI≥24 kg/m2(超重)及BMI≥28 kg/m2(肥胖)三种等级的分布情况进行 χ2检验,差异无统计学意义(χ2=0.88,P=0.64)。两组患者的年龄、生育史、既往手术史、基础合并疾病及病理类型均进行比较,差异均无统计学意义(P>0.05),见表2。 2.2 两组患者围手术期各项指标比较 研究组与对照组的围手术期指标(包括手术时间、术中出血量、术后24 h腹腔引流量、术后住院天数、疼痛分级、术后抗生素升级)比较,差异均有统计学意义(P<0.05)。疼痛分级分布情况如图1。而两组患者术中淋巴清扫数目、术后肛门排气时间比较,差异无统计学意义(P>0.05),见表3。机器人辅助腹腔镜组46例患者中无1例出现严重并发症,传统腹腔镜手术组中出现了1例肠梗阻患者。两组患者严重并发症发生率比较,差异无统计学意义(χ2=1.397,P=0.24)。机器人辅助腹腔镜组无中转开腹情况。 2.3 机器人辅助腹腔镜组手术时间散点图 随着达芬奇机器人辅助腹腔镜手术例数的不断增加,术者累积了一定的手术经验后,患者的手术时间也较之前有下降趋势(如图2)。 3 讨论 机器人微创外科手术系统因其微创、疼痛轻、恢复快、住院时间短、床位周转快等优点,已成为医患双方共同认可的手术选择。它不仅具备传统微创外科手术的所有优点,还拥有更突出的优势[2-6]:①该系统位于手术室无菌区之外,拥有三维立体手术视野和极强的临场画面,能使术者获得满意的手术体验,且能精准操控手术视野。此外,外科医生坐在控制台处进行手术,该体位可减轻术者疲劳。②该系统的操作流程不仅与腹腔镜手术完全相同,而且学习曲线大大缩短。③主刀医生可以自行完成全部操作,避免了与助手之间因配合不熟练导致的低效及错位操作问题。④配备了高分辨率三维镜头,手术野图像可以清晰放大10倍,并且3D镜像模式可以确保术者清晰看到操作区血管后方的解剖结构,使超精细操作变为现实。⑤机械臂拥有7个自由度,能提升特殊部位的操作空间,甚至超越了开腹手术的活动范围。⑥拥有自动除颤功能,手术安全性被加固。 本研究中,机器人辅助腹腔镜手术组患者与传统腹腔镜手术组患者的基本属性(包括年龄、BMI、基础疾病、既往手术史、生育史、疾病种类)各项指标比较,差异均无统计学意义(P>0.05),因此这两组患者围手术期基本资料具有可比性。机器人辅助腹腔镜手术组的手术时间与传统腹腔镜手术组比较,差异具有统计学意义(P<0.01),机器人辅助腹腔镜手术所需要的平均手术时间较传统腹腔镜手术长,这与姜蕾等人[7]的研究结果一致。其主要原因可能是机器人手术系统装机需要额外时间,而且装机的熟练度也会影响手术时间。本团队的术者在初期手术的探索中也花费了大量时间学习及适应各种机器人手术器械的操作,因此也延长了手术时间。但值得肯定的是,经过大量手术操作的历练,积累了丰富的手术经验后,本团队可在手术过程中减少机械臂出入体腔的次数,逐渐缩短了实际手术操作时间。因此,机器人辅助系统在妇科良性、早期恶性疾病的治疗中仍具备潜在优势。 微创手术的优势不仅体现在手术切口小,还体现在其能减少手术出血量、快速恢复胃肠功能、降低感染率及疼痛程度等。黄小冰等人[8]在2019年对机器人辅助腹腔镜与传统腹腔镜下子宫内膜癌根治手术的临床效果进行了对比分析,发现机器人輔助腹腔镜手术在术中出血量、术后排气时间、住院时间及疼痛评分等方面均较传统腹腔镜手术更具优势。本研究中,机器人辅助腹腔镜组与传统腹腔镜手术组的术中出血量比较,差异有统计学意义(P<0.01),结果显示机器人辅助腹腔镜组平均术中出血量较传统腹腔镜组少,这与前述研究结果一致。微创手术可以加快胃肠功能的恢复,减少粘连等并发症。本研究结果显示,机器人辅助腹腔镜组与传统腹腔镜组肛门排气的平均时间比较,差异无统计学意义(P=0.11)。此外,虽然机器人辅助腹腔镜手术组总的麻醉时间较长,但并未延缓胃肠功能的快速恢复。手术后24 h是患者二次出血的最危险时间段。本研究回顾分析了所有患者的病例资料,发现机器人辅助腹腔镜组术后24 h平均腹腔引流量较传统腹腔镜组明显下降,且差异有统计学意义(P<0.05)。大量研究结果[9-10]显示,机器人辅助腹腔镜组的术后24 h腹腔引流量均较传统腹腔镜组少,这主要与机器人手术系统的高倍视野、双极电凝和单极剪刀的止血彻底有关。微创手术最基本的要求是在保证临床疗效的前提下,最大限度地减少手术诱发的全身炎症性伤害反应,术后需要常规监测患者生命体征及相关炎症指标的变化。监测患者术后生命体征及感染指标,若体温24 h内持续上升且大于38.0 ℃,血常规提示白细胞>10×109/L和/或C-反应蛋白(C-reactive Protein,CRP)>10 mg/L和/或降钙素原(Procalcitoni,PCT)>0.5 ng/ml,则提示有感染,可视具体情况升级该患者的抗生素类别,如改为三代头孢、青霉素类限制性药品,甚至根据药敏试验使用特殊使用级抗生素。本研究数据分析表明,机器人辅助腹腔镜手术组患者抗生素升级率较传统腹腔镜组少,且差异有统计学意义(P<0.05)。这与机器人辅助手术能够有效减少手术区域较多组织的反复凝切操作、手术操作精细、术中出血量少、进出体腔的次数降低等有关,与齐金红等人[11]的研究结果契合,同时说明达芬奇机器人手术引起的机体炎症反应可在短时间内自行消退。 机器人微创技术的革新大大降低了患者术后疼痛体验及对镇痛泵的依赖。疼痛是术后应激反应的主要原因,机体激发并释放出一系列的应激反应活性物质,可导致淋巴细胞减少、白细胞增多,致使手术创伤愈合延迟[12-13]。疼痛亦会引起交感神经系统兴奋,反射性地抑制胃肠道功能,一旦胃肠道功能紊乱,很可能会导致肠麻痹、恶心、呕吐等不良反应,而胃肠道的细菌和毒素则进入血液循环,诱发内毒素血症和败血症,增加围手术期的并发症及延长术后恢复时间。同时,术后疼痛应激反应可导致患者细胞免疫和体液免疫功能受到抑制,增加术后感染的发生概率[14]。本研究中,医护人员常规询问患者术后疼痛情况,并运用VRS法对疼痛进行分级,发现机器人辅助腹腔镜手术组患者的发生疼痛体验感明显较腹腔镜手术患者的少,多数患者无疼痛体验。本研究46例患者中,共17例患者无疼痛感觉,将机器人辅助腹腔镜组与传统腹腔镜组患者术后疼痛等级的分布情况进行比较,差异有统计学意义(P<0.01)。Louie B E等人[15]也同样发现,达芬奇机器人手术系统辅助腹腔镜较传统腹腔镜手术更能减轻术后疼痛、加快术后康复。 对于妇科恶性肿瘤,手术范围涉及盆腔淋巴清扫甚至腹主动脉旁淋巴清扫,本研究中將机器人辅助腹腔镜组与传统腹腔镜手术组的淋巴清扫数目进行比较,发现机器人辅助腹腔镜组平均淋巴清扫数目较传统腹腔镜组的多,但统计学结果显示差异无统计学意义(P>0.05)。Magrina J F等人[16]研究发现,围手术期中机器人组与传统腹腔镜组淋巴结清扫数目无差异,与本研究结果一致。但Corrado G等人[17]针对655例合并肥胖的子宫内膜癌分期手术的患者进行了一项多中心研究,其中249例接受机器人辅助腹腔镜手术,406例接受传统腹腔镜手术,研究结果显示机器人组淋巴结清除率增加两倍,故本团队后期仍需增加手术病例的积累,进一步明确达芬奇机器人辅助腹腔镜手术系统在淋巴清扫方面的优越性,为患者提供一个中肯的手术建议。 考虑到初期探索机器人辅助手术的经验不足,本团队选择的恶性肿瘤病种一般为早期。而对于有多次腹部手术史、怀疑腹盆腔重度粘连、子宫较大及肥胖的患者,行传统腹腔镜手术难度较大,推荐进行机器人辅助腹腔镜手术。多项研究证明[5,18],机器人辅助腹腔镜手术在肥胖、粘连严重、子宫内膜异位症患者中更能体现出优势。二次手术患者及盆腔子宫内膜异位症患者的盆腔解剖结构复杂、粘连严重、病灶毗邻重要脏器,操作空间局限,而机器人手术则可以打破这些限制。对宫颈原位癌及早期癌病变患者,本团队一般多切除1 cm阴道上壁,故在处理膀胱宫颈韧带时,需将盆腔神经丛到达膀胱支的神经解剖出来,在保留神经的内侧切除阴道旁组织。传统腹腔镜手术因解剖位置较深,手术艰难,极易出血及损伤神经,达芬奇机器人因其具有3D高清术野,可以轻松地辨认神经层次而减少损伤[19-20]。 虽然患者可以从机器人辅助手术中获得颇多收益,但新的手术技术一般需要大量病例的积累才能达到一定的熟练度。本研究发现,随着手术例数的增加及手术经验的不断累积,手术时间较初期探索时有明显减少的趋势,这也验证了其他中心的研究结果[21-22]。 综上所述,本团队在达芬奇机器人辅助腹腔镜初期手术的摸索中也收获并积累了很多手术技巧:①确定了穿刺器(Trocar)的最佳位置,镜头孔由目标位置和操作范围决定,建议偏向脐部一侧,这样可以拉开机械臂与镜头孔距离;②确定了机械臂与辅助孔位置,逐步模式化各种手术方式对应的Trocar位置;③在缺乏力反馈状态下熟练掌握了机器人辅助下的缝合技术,如阴道残端缝合、子宫创面缝合、阴道网片骶骨缝合等;④熟练掌握了能量器械的使用;⑤固化了手术床体位;⑥助手和护理人员在装机过程中不断磨合,增加了配合默契度,减少了各个环节的时间损失。通过对这些经验的积累,本团队的手术操作逐渐熟练并细化,建议初步开展机器人辅助腹腔镜手术时应首先重视安全,然后再优化各个步骤和各部门之间的配合。有了前期成功的探索经验,本团队更有信心开展机器人辅助腹腔镜手术,使更多患者获益,并将进一步利用机器人手术系统探索重度盆腔子宫内膜异位症的治疗。 参考文献 [1] Arian S E, Munoz J L, Kim S, et al. Robot-assisted laparoscopic myomectomy: current status[J]. Robot Surg, 2017. DOI: 10.2147/RSRR.S102743. [2] Sfakianos G P, Frederick P J, Kendrick J E, et al. Robotic surgery in gynecologic oncology fellowship programs in the USA: a survey of fellows and fellowship directors[J]. Int J Med Robot, 2010, 6(4): 405-412. [3] ZHANG W, LI H Y, CUI L L, et al. Research progress and development trend of surgical robot and surgical instrument arm[J]. Int J Med Robot, 2021, 17(5): e2309. [4] Capozzi V A, Scarpelli E, Armano G, et al. Update of robotic surgery in benign gynecological pathology: systematic review[J]. Medicina (Kaunas), 2022, 58(552): 1-16. [5] Rossi E C, Kowalski L D, Scalici J, et al. A comparison of sentinel lymph node biopsy to lymphadenectomy for endometrial cancer staging (FIRES trial): a multicentre, prospective, cohort study[J]. Lancet Oncol, 2017, 18(3): 384-392. [6] Araujo S E, Seid V E, Marques R M, et al. Advantages of the robotic approach to deep infiltrating rectal endometriosis: because less is more[J]. J Robot Surg, 2016, 10(2): 165-169. [7] 姜蕾, 周瑞泉, 閆沛静, 等. 机器人与腹腔镜治疗子宫内膜癌短期疗效对比[J]. 中华腔镜外科杂志(电子版), 2018, 11(5): 290-294. [8] 黄小冰, 范江涛, 陈红燕, 等. 机器人与腹腔镜手术治疗子宫内膜癌的对比研究[J]. 中国现代医学杂志, 2019, 29(4): 48-52. [9] 郭芳芳, 赵月鸣, 冯文娟, 等. 机器人与腹腔镜手术治疗早期子宫内膜癌的临床疗效对比分析[J]. 中华腔镜外科杂志(电子版), 2017, 10(3): 166-169. [10] 王留利, 闫沛静, 杨克虎, 等. 机器人与腹腔镜手术治疗妇科疾病围术期效果对比分析[J]. 中华腔镜外科杂志(电子版), 2018, 11(6): 347-351. [11] 齐金红, 袁勇, 冯文娟, 等. 达芬奇机器人在妇科手术应用中的安全性评价[J]. 机器人外科学杂志, 2021, 2(2): 111-122. [12] Alan P, Kristin B, Tommaso F, et al. Postoperative adhesions in gynecologic surgery: a committee opinion[J]. Fertil Steril, 2019, 112(3): 458-463. [13] Torrance H D, Pearse R M, ODwyer M J. Does major surgery induce immune suppression and increase the risk of postoperative infection?[J]. Curr Opin Anaesthesiol, 2016, 29(3): 376-383. [14] Nasir B S, Bryant A S, Minnich D J, et al. Performing robotic lobectomy and segmentectomy: cost, profitability and outcomes[J]. Ann Thorac Surg, 2014, 98(1): 203-209. [15] Louie B E, Farivar A S, Aye R W, et al. Early experience with robotic lung resection results in similar operative outcomes and morbidity when compared with matched ideo-assisted thoracoscopic surgery cases[J]. Ann Thorac Surg, 2012, 93(5): 1598-1605. [16] Magrina J F, Kho R M, Weaver A L, et al. Robotic radical hysterectomy: comparison with laparoscopy and laparotomy[J]. Gynecol Oncol, 2008, 109(1): 86-91. [17] Corrado G, Vizza E, Cela V, et al. Laparoscopic versus robotic hysterectomy in obese and extremely obese patients with endometrial cancer: a multi-institutional analysis[J]. Eur J Surg Oncol, 2018, 44(12): 1935-1941. [18] Soto E, Luu T H, Liu X, et al. Laparoscopy vs robotic surgery for endometriosis (LAROSE): a multicenter, randomized, controlled trial[J]. Fertil Steril, 2017, 107(4): 996-1002. [19] Cusimano M C, Baxter N N, Gien L T, et al. Impact of surgical approach on oncologic outcomes in women undergoing radical hysterectomy for cervical cancer[J]. Am J Obstet Gynecol, 2019, 221(6): 619.e1-619.e24. [20] Ramirez P T, Frumovitz M, Pareja R, et al. Minimally invasive versus abdominal radical hysterectomy for cervical cancer[J]. N Engl J Med, 2018, 79(20): 1895-1904. [21] Soliman P T, Iglesia S D, Munsell M F, et al. Successful incorporation of robotic surgery into gynecologic oncology fellowship training[J]. Gynecol Oncol, 2013, 131(3): 730-733. [22] Yim G W, Sang W K, Nam E J, et al. Learning curve analysis of robot-assisted radical hysterectomy for cervical cancer: initial experience at a single institution[J]. J Gynecol Oncol, 2013, 24(4): 303-312.
猜你喜欢
机器人外科学(2024年1期)2024-03-24 20:18:45
机器人外科学(2024年1期)2024-03-24 10:40:55
机器人外科学(2024年1期)2024-03-24 10:40:55
腹腔镜外科杂志(2022年7期)2022-08-16 04:31:06
中国民间疗法(2021年4期)2021-06-09 09:19:54
家庭医学(下半月)(2019年9期)2019-10-12 08:04:04
中国内镜杂志(2017年2期)2017-03-20 16:18:12
腹腔镜外科杂志(2016年11期)2016-06-01 12:10:09
腹腔镜外科杂志(2016年9期)2016-06-01 12:10:07
中国民族医药杂志(2016年2期)2016-05-14 07:12:05