下肢康复机器人训练对脑卒中偏瘫患者步行功能的影响
2023-08-29 08:56:47李京泽邢靖松吕福现刘福迁段好阳
机器人外科学 2023年6期
李京泽 邢靖松 吕福现 刘福迁 段好阳
摘 要 目的:讨论下肢康复机器人训练对脑卒中偏瘫患者下肢运动能力和步行能力的影响。方法:选取2020年6月—2021年12月吉林大学第一医院康复科收治的38例符合纳入标准的脑卒中偏瘫患者,通过随机数字表法将其随机分为对照组(19例)和观察组(19例)。两组患者均给予常规康复治疗,同时观察组患者给予为期4周的下肢康复机器人治疗。分别于治疗前、治疗2周后和4周后采用Berg平衡量表(Berg Balance Scale,BBS)、功能性步行量表 (Functional Ambulation Category,FAC)和改良Barthel指數(Modified Barthel Index,MBI)评估两组患者的平衡功能、下肢运动功能、步行功能和日常生活活动(Activities of Daily Living,ADLs)能力。
结果:治疗2周后,两组患者的各项评分较治疗前均无明显差异(P>0.05)。治疗4周后,两组患者的各项评分均改善,差异有统计学意义(P<0.05)。结论:下肢康复机器人训练可以显著改善脑卒中偏瘫患者的平衡能力、下肢运动功能、步行能力和ADLs能力。
关键词 康复机器人;脑卒中;偏瘫;下肢;步行功能
中图分类号 R496 文献标识码 A 文章编号 2096-7721(2023)06-0512-05
Effect of lower limb rehabilitation robotic training on walking function of stroke patients with hemiplegia
LI Jingze1, XING Jingsong2, LYU Fuxian2, LIU Fuqian2, DUAN Haoyang2
(1. School of Nursing, Jilin University, Changchun 130021, China; 2. Department of Rehabilitation, the First Hospital of
Jilin University, Changchun 130021, China)
Abstract Objective: To explore the effect of lower limb rehabilitation robotic training on walking function of stroke patients with hemiplegia. Methods: 38 stroke patients with hemiplegia who were admitted to the Rehabilitation Department of the First Hospital of Jilin University from June 2020 to December 2021 were selected and randomly divided into the control group (19 cases) and observation group (19 cases) by random number table method. Patients in both groups were given routine rehabilitation treatment, while patients in the observation group were given lower limb rehabilitation robotic treatment for 4 weeks. Balance function, lower limb motor function, walking function and activities of daily living (ADLs) in both groups were assessed by berg balance scale (BBS), functional ambulation category (FAC) and modified barthel index (MBI) before treatment, 2 weeks and 4 weeks after treatment. Results: After 2 weeks of treatment, the scores of the two groups were not significantly improved compared with those before treatment (P>0.05), and there was no significant difference between the two groups (P>0.05). After 4 weeks of treatment, the scores of the two groups were improved by intra group comparison, and the differences were statistically significant (P<0.05), the differences in the scores of the two groups were statistically significant (P<0.05). Conclusion: Lower limb rehabilitation robotic training could effectively improve the balance ability, lower limb motor function, walking ability and ADLs ability of stroke patients with hemiplegia.
Key words Rehabilitation robot; Stroke; Hemiplegia; Lower limb; Walking function
收稿日期:2022-03-11 录用日期:2022-11-21
Received Date: 2022-03-11 Accepted Date: 2022-11-21
基金项目:吉林省科技厅重点研发项目(20200404209YY)
Foundation Item: Key Research and Development Project of Jilin Provincial Science and Technology Department (20200404209YY)
通讯作者:段好阳,Email:duanhy101129@163.com
Corresponding Author: DUAN Haoyang, Email: duanhy101129@163.com
引用格式:李京泽,邢靖松,吕福现,等. 下肢康复机器人训练对脑卒中偏瘫患者步行功能的影响[J]. 机器人外科学杂志(中英文),2023,4(6):512-516.
Citation: LI J Z, XING J S, LYU F X, et al. Effect of lower limb rehabilitation robotic training on walking function of stroke patients with hemiplegia[J]. Chinese Journal of Robotic Surgery, 2023, 4(6): 512-516.
步行功能障碍是患者发生脑卒中偏瘫后最常见的下肢问题,步行功能的改善程度是评价患者康复质量的标准之一[1]。目前,进行下肢运动训练的方法有很多种,这些方法可在一定程度上改善患者的步行功能,但其优缺点各异。人工辅助步行功能训练是促进下肢运动功能康复的重要方法之一,但由于人工辅助步行功能训练过程中难以精确控制患者行走的步幅和步速,导致许多患者遗留下不同程度的“偏瘫步态”,严重影响了患者的康复质量和心理状态[2]。
近年来,随着机器人技术的快速发展,康复机器人系统逐渐被运用到临床患者的康复训练中,有效地改善了脑卒中偏瘫患者的肢体运动功能[3]。
本研究通过应用下肢康复机器人治疗步行功能障碍患者,旨在讨论其对脑卒中偏瘫患者下肢运动能力和步行能力的影响。
1 资料与方法
1.1 临床资料
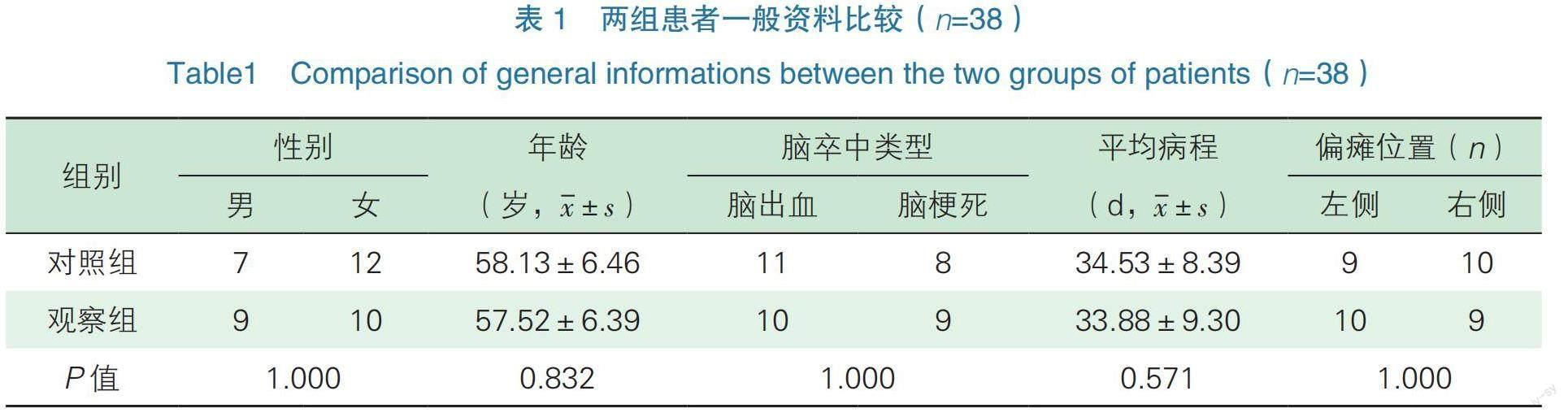
回顾性分析2020年6月—2021年12月吉林大学第一医院康复科收治的38例脑卒中后偏瘫患者的临床资料,按随机数字表法将其分为对照组和观察组,各19例。比较两组患者一般资料,差异无统计学意义(P>0.05),见表1。
纳入标准:①首次发病,符合脑卒中诊断标准[4],并经影像学检查确诊;②单侧发病;③偏瘫侧下肢运动功能的Brunnstrom分期≥Ⅲ期;④Holden步行功能分级≥1级;⑤病情稳定,配合治疗且愿意签署知情同意书者。
排除标准:①康复治疗期间病情加重者;②脑卒中复发者;③患侧髋、膝、踝关节被动活动范围受限者;④存在其他脏器功能不全或恶性高血压等合并症者;⑤存在严重认知及交流障碍无法配合者。
1.2 方法
1.2.1 治疗方法
两组患者均给予常规康复训练,每次共治疗90 min,2次/d,6 d/周,连续康复训练4周[4]。同时,观察组患者给予下肢康复机器人训练,每次训练40 min,1次/d,6 d/周,连续康复训练4周。
下肢康复机器人训练具体方法:设备采用意大利Parabel公司生产的下肢步行姿势训练系统。①患者取坐位,选取合适大小的“靴子”,穿戴于患者足-踝-小腿部位;②紧固“靴子”的护套,通过“靴子”将患者下肢固定到机器人上;③将安全带固定到患者骨盆和双侧髋关节处,通过悬吊系统使患者逐渐站立于运动平板上,使患者髋、膝关节得到充分伸展,并能支撑体重;④再次检查所有护套和安全带,以保证患者安全;⑤机器人的初始坡度设定为0°,速度设定为1 km/h,根据患者体重和舒适度调整减重力量,根据患者步行功能的进步逐级增加训练强度[5]。
1.2.2 评定标准
于治疗前、治疗2周后和治疗4周后,由不参与治疗的康复评定师对两组患者进行下肢运动能力、步行能力等方面的评定。患者的平衡能力采用Berg平衡量表(Berg Balance Scale,BBS)评定[6],患者下肢运动功能采用简化的下肢Fugl-Meyer运动功能量表(Fugl-Meyer Assessment,FMA)评定[7],患者的步行能力采用功能性步行量表(Functional Ambulation Category,FAC)评定[8],患者日常生活活动(Activities of Daily Living,ADLs)能力采用改良Barthel指数(Modified Barthel Index,MBI)评定[9]。
1.2.3 统计学方法
所有数据采用SPSS 21.0统计学软件进行分析处理,计数资料以“例”表示,采用 χ2检验進行比较,计量数据采用均数±标准差(x±s)表示,组间比较采用独立样本t检验,P<0.05表示差异有统计学意义。
2 结果
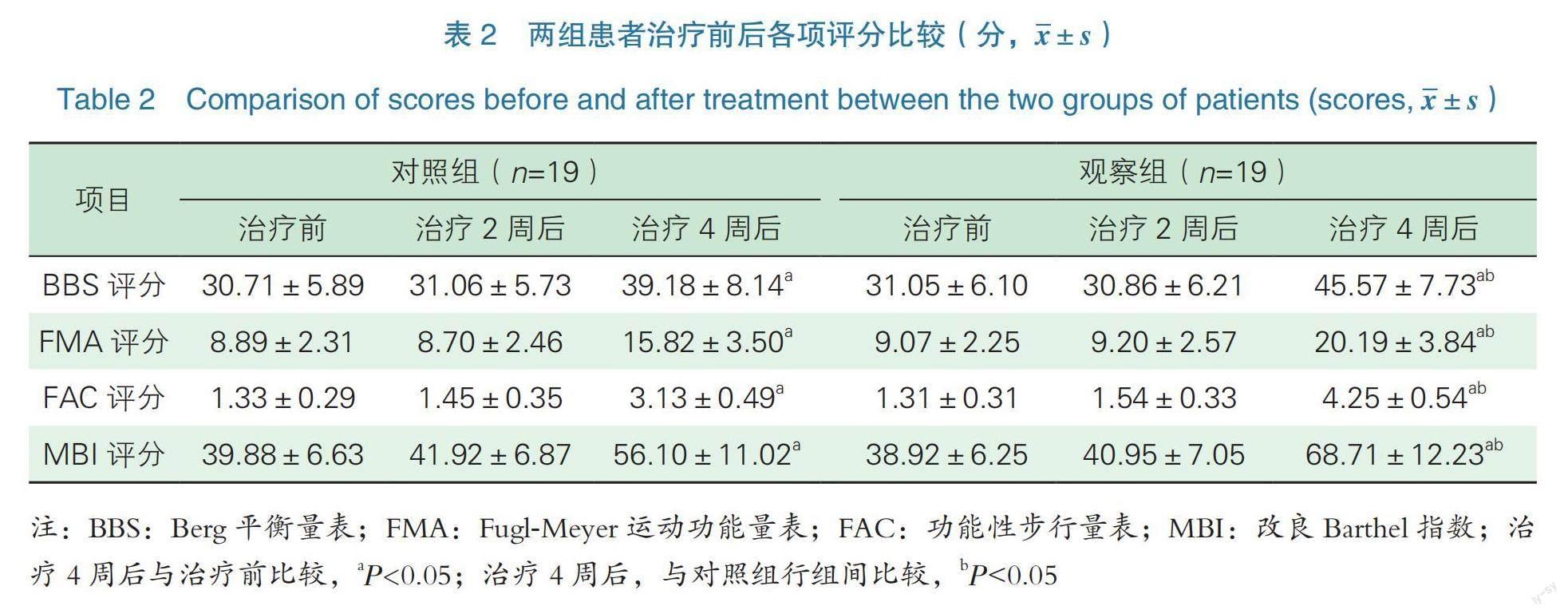
治疗前,两组患者的各项评分差异无统计学意义(P>0.05)。治疗2周后,两组患者的各项评分较治疗前均无明显改善,行组内和组间比较差异均无统计学意义(P>0.05)。治疗4周后,两组患者的各项评分较治疗前均显著改善,行组内和组间比较差异均有统计学意义(P<0.05),且观察组患者的各项评分明显优于对照组(见表2)。
3 讨论
多数患者在发生脑卒中后会遗留不同程度的肢体功能障碍,步行功能障碍是其中较常见的后遗症,主要表现为患侧下肢的承重能力减弱,平衡功能和协调能力降低,使得患者步幅缩短、步速减慢、步行效率下降,增加跌倒的风险,严重地影响了患者的运动功能和生活自理能力,同时也给家庭和社会造成沉重的经济负担。传统康复治疗方案是治疗师通过控制患者的髋、膝和踝关节,让患者重复性模拟地面自然行走。这种训练模式在一定程度上限制了骨盆和躯干的生理运动,难以将步行中的负重、平衡、迈步三要素有机结合,缺乏系统的内部感觉反馈及外部感觉反馈,导致动作缺乏实用性和连贯性,其康复治疗效果往往不甚理想,同时这种训练模式会大量消耗治疗师的体力,患者也缺乏对训练的兴趣和积极性,随着患者训练时间的延长,难以达到高强度、重复性训练要求,且容易出现异常步态[10-12]。
近年来,下肢康复机器人在临床康复中的应用已受到越来越多医务人员的重点关注[13]。与人工辅助步行训练相比,下肢康复机器人辅助训练具有效率高、重复性强等优势,能在一定程度上代替治疗师引导偏瘫患者进行持续的、不间断的步行训练,减轻了人力成本。下肢康复机器人的减重系统可以调整患者双足间的距离以及足内外翻、踝关节屈伸的角度,达到精准治疗的目的,同时患者在减重后的步行耗能降低,促使患者坚持完成康复训练。下肢康复机器人的步态矫正系统通过设定运动速度、步态偏角度、足间距等来抑制患者异常步态,避免足下垂、足内外翻等情况的发生,帮助患者在早期康复训练中进行接近正常生理步态的重复性训练,有效提高步行稳定性,建立正常的步行模式。下肢康复机器人的负荷刺激及感觉输入系统可刺激下肢髋、膝、踝及足底等各关节本体感受器,强化下肢感觉的输入,重建正常运动模式,从而改善下肢的运动功能。下肢康复机器人的虚拟现实训练系统能够减少患者被动治疗的枯燥性,提高患者的依从性和主动参与治疗的积极性。脑卒中患者通过下肢康复机器人的重复动作训练,可建立正确的运动模式,改善其步行功能[14-16]。
本研究显示,与治疗前比较,治疗2周后两组患者的各项评分较治疗前均无明显改善,行组内比较和组间比较,差异均无统计学意义(P>0.05),这可能与患者平衡能力、下肢运动功能和步行能力的恢复需要一段时间的积累有关,这说明短时间的训练并不能显著改善患者的功能。治疗4周后与治疗前比较,两组患者的各项评分均有显著改善,差异有統计学意义(P<0.05),这表明常规的康复治疗和常规康复治疗联合下肢康复机器人训练都可以改善脑卒中后偏瘫患者的平衡能力,促进其下肢运动功能和步行能力恢复。行组间比较,观察组患者的各项评分明显优于对照组,差异均有统计学意义(P<0.05),这表明通过下肢康复机器人训练可对患者的运动模式进行调整,根据患者的具体情况和功能恢复进展情况制定有针对性的治疗方案,通过设置患者髋、膝、踝关节的屈伸角度、训练时间、角速度等参数,设定符合患者生理运动的模式,促进患者整体运动功能的改善,提高康复疗效。
综上所述,针对脑卒中偏瘫患者的下肢运动功能障碍,经过4周的下肢康复机器人康复训练,可有效提高患侧下肢的肌力、改善其步行功能,值得临床推广应用。由于条件限制,本文只做了小样本研究,未来有待于更大样本量的深入研究进一步证实。
参考文献
[1] 段好阳, 闫兆红, 刘娜, 等. 等速肌力训练不同介入时机和治疗时程对恢复期脑卒中偏瘫患者步行功能的影响[J].中国康复医学杂志, 2018, 33(10): 1173-1177.
[2] 施爱梅, 郑琦, 柏和风, 等. 骨盆辅助式康复机器人联合重复经颅磁刺激对脑卒中后偏瘫患者下肢功能的影响[J].中华物理医学与康复杂志, 2021, 43(8): 712-716.
[3] 乐琳. 下肢康复机器人对脑梗死后下肢偏瘫患者康复的影响[J].中华物理医学与康复杂志, 2020, 42(6): 536-538.
[4] 中华神经科学会, 中华神经外科学会. 各类脑血管疾病诊断要点[J].中华神经科杂志, 1996, 29(6): 379-380.
[5] 熊华春, 陈精慧, 王军, 等. 下肢康复机器人训练对痉挛型脑瘫患儿粗大运动功能及平衡功能的影响[J].郑州大学学报(医学版), 2021, 47(3): 370-375.
[6] 段好阳, 闫兆红. 动态平衡训练仪治疗老年脑卒中后倾斜综合征的临床疗效[J].中国老年学杂志, 2018, 38(17): 4132-4134.
[7] 周维金, 孙启良. 瘫痪康复评定手册[M].北京: 人民卫生出版社, 2006: 46-50.
[8] Hesse S, Konrad M, Uhlenbrock D.Treadmill walking with partial body weight support versus floor walking in hemiparetic subjects[J].Arch Phys Med Rehabil, 1999, 80(4): 421-427.
[9] 段好阳, 李贞兰, 吕福现, 等. 不同屈膝肌群和伸膝肌群肌力比值的等速肌力训练治疗脑卒中后膝过伸的疗效评价[J].吉林大学学报(医学版), 2021, 47(6): 1538-1543.
[10] 胡思学, 钱开林, 秦义婷, 等. 上肢和肩周肌力训练对脊髓损伤患者转移功能和日常生活活动能力的影响[J].中华物理医学与康复杂志, 2019, 41(10): 748-751.
[11] 毋楠楠.早期等速肌力训练对脑卒中偏瘫患者肌力与平衡功能的影响[J].实用医药杂志, 2020, 37(11): 1001-1003.
[12] 段好阳, 刘福迁, 闫兆红, 等. 四肢联动功能训练对脑卒中患者躯干控制能力及平衡功能的影响[J].中华物理医学与康复杂志, 2015, 37(10): 747-749.
[13] 邓晓青. 机器人早期辅助步行训练对脑卒中后偏瘫患者下肢运动功能的影响[J].广州医科大学学报, 2018, 46(3): 20-23.
[14] 裴强, 周诚, 王毅, 等. 下肢康复机器人训练对脑卒中患者下肢运动功能的影响[J].中国伤残医学, 2021, 29(7): 71-73.
[15] 孙志成, 朱晓军, 管重远, 等. 下肢运动控制训练联合核心稳定性训练对脑卒中偏瘫患者下肢功能恢复的影响[J].中华物理医学与康复杂志, 2015, 37(4): 270-273.
[16] 刘畅, 郄淑燕, 王寒明, 等. 下肢康复机器人对脑卒中偏瘫患者下肢运动功能与步行能力的效果[J].中国康复理论与实践, 2017, 23(6): 696-700.
猜你喜欢
中国民间疗法(2021年19期)2021-11-20 06:22:38
中国民间疗法(2021年16期)2021-11-04 08:13:58
家庭医学(下半月)(2020年3期)2020-05-30 12:42:04
中国实用医药(2016年24期)2016-10-17 06:05:29
中国实用医药(2016年24期)2016-10-17 05:56:32
中国实用医药(2016年24期)2016-10-17 05:47:48
中国实用医药(2016年24期)2016-10-17 05:30:14
湖北体育科技(2016年11期)2016-02-27 15:25:12
中国康复理论与实践(2015年10期)2015-12-24 05:42:45
中国医疗美容(2015年1期)2015-07-12 10:06:07