
音圈致动快速反射镜机电联合仿真技术
2023-08-28 09:22:00许永森王福超徐钰蕾周平伟
红外技术 2023年8期
张 宇,许永森,王福超,徐钰蕾,周平伟
〈系统与设计〉
音圈致动快速反射镜机电联合仿真技术
张 宇1,2,许永森1,王福超1,徐钰蕾1,周平伟1
(1. 中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2. 中国科学院大学,北京 100049)
针对某红外搜索系统快速反射镜设计需求,研究基于十字簧片传动结构与音圈致动器的快速反射镜机电联合仿真技术。建立快速反射镜的机电参数化模型,采用有限元分析法构建柔性结构传动刚度模型,同时建立音圈制动器的电磁驱动模型,并进行关键参数的迭代设计确定最优参数;以Matlab/Simulink为联合仿真平台,建立反射镜动力学仿真接口与电磁驱动仿真接口,结合经典控制模型实现对反射镜机构的联合仿真,并获得系统动态响应的仿真结果。最后通过实验测试验证50Hz成像周期下回扫补偿残差与相位滞后,其中实测回扫补偿残差0.0365mrad,相位滞后2.6ms,虽然高于仿真分析结果但能够满足工程应用的需求;并对系统的开环频响曲线进行对比,中低频幅值响应误差不超过10%。仿真和实验结果表明,该联合仿真技术对于快速反射镜的设计与优化具有重要的理论指导意义。
快速反射镜;音圈电机;联合仿真;结构分析
0 引言
快速反射镜是一种具有高加速度与精密指向控制能力的反射镜机构[1]。快速反射镜技术的研究始于20世纪美国的激光反导演示项目,麻省理工大学在2000年分别研制了应用于空间激光通信实验的高带宽快速反射镜(high bandwidth steering mirror, HBSM)[2],以及磁阻原理的先进快速反射镜(advanced fast steering mirror, AFSM)[3]等;美国新一代的机载、舰载光电成像与探测系统都采用了快速反射镜作为光束指向与稳定的精密执行组件:如美国F35战机的光电跟踪系统(electro-optical targeting system, EOTS)使用了快速反射镜作为精密跟踪执行器[4]。中科院光电技术研究所是国内较早开展快速反射镜的研究单位,中科院长春光机所则在20世纪90年代开发了应用于大型光电经纬仪跟踪和光束稳定的摆角电机快速反射镜[5];而后如华中科技大学[6]、国防科技大学[7]以及哈尔滨工业大学等也相继取得了一些成果。
在快速反射镜的研发过程中,反射镜的通光口径、运动行程、控制带宽等往往表现出互相制约的技术问题,要实现约束条件下最优的设计需要建立反射镜运动机构的关键参数模型。由于快速反射镜的研制涉及到机械、电磁、控制等多项领域,结合当前多学科联合仿真的技术发展趋势,通过对关键变量的参数化设计,结合联合仿真技术实现快速反射镜从设计输入到系统响应的端对端模拟。本文围绕机载红外光电搜索系统对快速反射镜动态稳像应用的技术需求,研究一种基于音圈电机驱动与十字簧片柔性传动的联合仿真模型,通过对其参数化建模实现快速的原型设计与参数迭代,应用多学科联合仿真技术与物理模型的实测结果对比,验证了联合仿真方法的正确性,为快速反射镜的优化设计方法与工程实践提供重要的理论支撑。
1 红外搜索系统快速反射镜工作参数分析
1.1 反射镜扫描像移补偿性能
红外搜索系统为实现快速搜索与跟踪,采用如图1的光学系统布局,其中前组为无焦缩束系统,后组为成像系统。光学系统整体绕方位轴以1角速度转动,由于框架的扫描运动导致成像系统在焦平面上产生运动像移,在无焦缩束系统后的平行光路中设置快速反射镜,控制反射镜以2角速度反向补偿,实现对扫描运动的快速回扫补偿,保证积分时间内光轴对目标的凝视成像能力。
根据红外搜索系统的技术参数:视场角6.7°×5.36°,缩束比=1.5,扫描速度1=246°/s,积分时间=6ms,系统工作帧频50fps。根据上述工作原理,反射镜回扫速度参数2=1×/2;积分时间内反射镜的运动行程为=2×=1.11°;系统单帧的成像周期为20ms,设稳速时间占比35%,返程与加减速调整时间65%,反射镜峰值角加速度不低于1131rad/s2,反射镜的角度行程考虑到速度调整时间设计为±1.8°,系统的角分辨率为0.09mrad,反射镜回扫补偿残差一般不超过0.03mrad(或在其附近)。
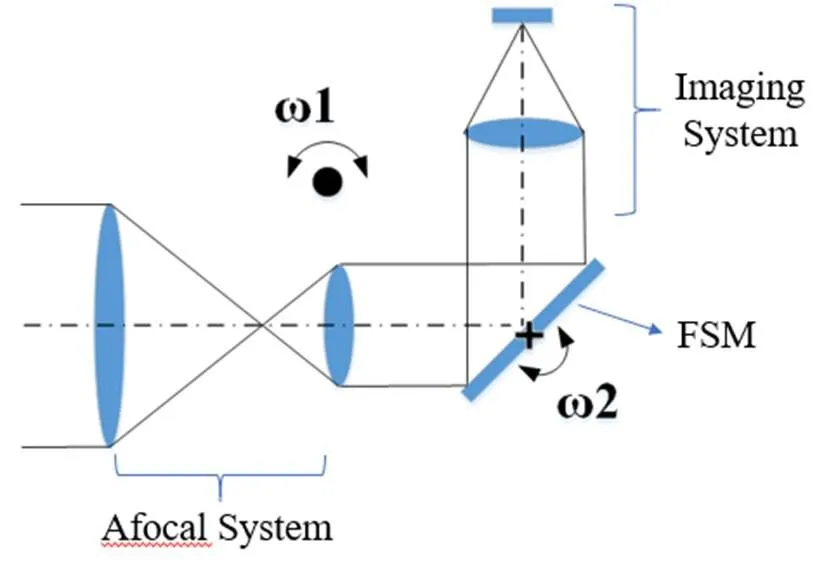
图1 红外搜索光学系统工作原理
1.2 快速反射镜的机电参数化模型
快速反射镜的结构主要包括反射镜、柔性传动机构、驱动器以及转角测量传感器等,其方案的分类主要从柔性传动机构形式与驱动器类型两个方面。柔性传动结构关系到反射镜整体的角度行程、运动精度以及控制带宽等,是快速反射镜设计的重要参数之一。常规的柔性传动结构有:圆切口铰链、簧片铰链、杆结构铰链等,其中十字簧片结构具有大行程、低应力、转轴寄生运动小、扭转刚度低等显著技术优势。驱动器主要分为音圈电机驱动和压电陶瓷驱动:其中音圈直线电机驱动具有大行程的优点,但驱动力比压电陶瓷小;压电驱动的行程小,难以满足大行程应用的需求。针对红外搜索系统的应用指标,采用十字簧片柔性传动结构和音圈电机驱动的技术路线,快速反射镜的整体结构如图2所示。
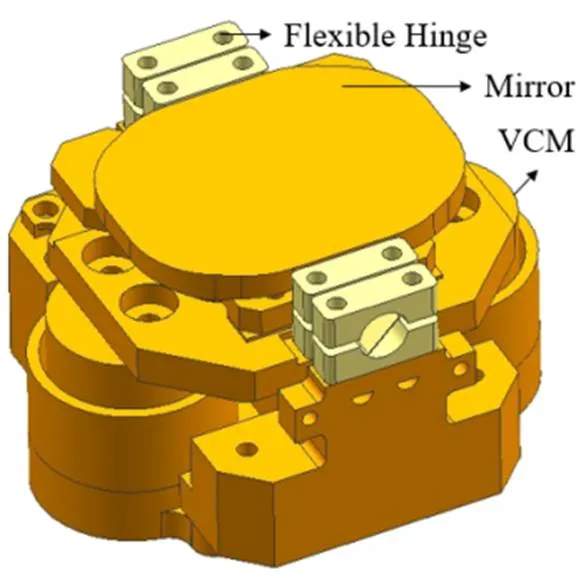
图2 快速反射镜结构示意图
1.2.1 快速反射镜的参数化模型
快速反射镜在理论上可以简化为如图3所示的扭转运动力学模型。设反射镜绕中心转轴转动的转矩为,反射镜及其支座的转动惯量为,中心柔性铰链的扭转刚度为,反射镜偏转角度为,音圈电机的动子质量为m,其随着反射镜发生转动,音圈电机到转动中心的距离为,系统的等效阻尼系数为,反射镜与电机相连处在垂直方向上的位移为。定义音圈电机通电时工作的力大小为F,则对于反射镜存在力矩平衡方程:
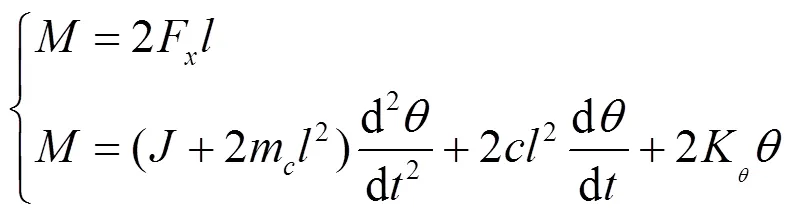
从上述模型中可知,影响系统响应的主要因素为柔性铰链的扭转刚度、电机出力(电机力常数)和转动惯量。
1.2.2 柔性传动机构的参数化模型
对于十字簧片柔性铰链传动结构,其简化示意图如图4所示。根据铰链的结构特点与经典的简支梁计算模型,建立单个十字簧片柔性铰链工作方向的扭转刚度表达式为:

式中:E为簧片材料的弹性模量;b为单簧片的宽度;s为单簧片的长度;t为单簧片厚度,另外图4中L为两对交叉簧片中心间距。
簧片采用弹簧钢材料,与钛合金、铜铍合金等相比,具有易于加工制造的优点[8]。带入簧片的尺寸参数长度6.5mm,宽度4.8mm,厚度0.16mm可以得到理论扭转刚度为0.1059N×m/rad。
为了验证柔性铰链刚度解析模型的准确性,利用有限元模型进行仿真分析,仿真结果如图5所示,其中图5(a)为变形云图,图5(b)为不同驱动力矩下铰链转角响应曲线。观察响应曲线可以确定柔性铰链的仿真扭转刚度为0.0993N×m/rad,仿真结果与理论计算结果存在6.2%的合理误差。
依据扭转刚度的设计结果,可计算快速反射镜在工作方向上的一阶固有频率:
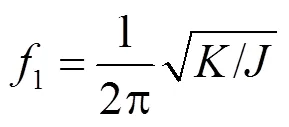
式中:K为系统扭转刚度,其大小为两个柔性铰链扭转刚度之和,上文中已经确定单个柔性铰链理论扭转刚度为0.1059Nm/rad。J为系统的转动惯量,根据快速反射镜的结构设计,确定其运动部分转动惯量大小为J=1.1095×10-5 kg×m2,由此可以确定快速反射镜的理论一阶固有频率为21.99Hz。
1.2.3 音圈驱动器的参数化模型
根据音圈制动器的工作原理,可以建立其平衡方程如下:

式中:、、、分别为音圈电机的工作电压,电流以及线圈电阻和电感;为反电动势,k和b为电机的力常数和反电动势系数。
作为音圈驱动器核心参数的电机力常数主要由磁体材料和结构参数确定,利用电磁仿真软件进行材料和结构的优化与分析。永磁体材料特性从根本上决定了电机力常数的水平,分别选用N40SH、FB13B和Alnico 5cc 3种不同材料,在3mm运动行程内电磁力曲线如图6(a)所示。由仿真结果可知N40SH钕铁硼永磁材料的性能优于其他两种材料,其输出力最大超过3N。除了磁性材料的影响外,磁轭结构对电机出力的影响较大,对比0.5mm、1.0mm、1.5mm、2.0mm四种不同外磁轭壁厚度电机出力曲线对比如图6(b)所示。随着磁轭壁厚的增加电机输出力变大,但超过限定壁厚尺寸,驱动器的输出力也不再明显提升;此外音圈电机的气隙是有约束的,壁厚增加会压缩气隙大小,气隙过小会导致动圈式音圈电机在运动时动子与定子的碰撞,综上分析外磁轭厚度在1.5mm最合适。
1.2.4 快速反射镜的机电传递函数模型
以快速反射镜的力学平衡方程(即式(1))为基础,结合音圈电机的平衡方程(即式(4)),同时考虑到通常很小,一般近似认为tan≈,则有=tan=。综上经过拉普拉斯变换可以得到反射镜转角与电机驱动电压的传递函数表达式如(5)式,模型框图如图7所示。
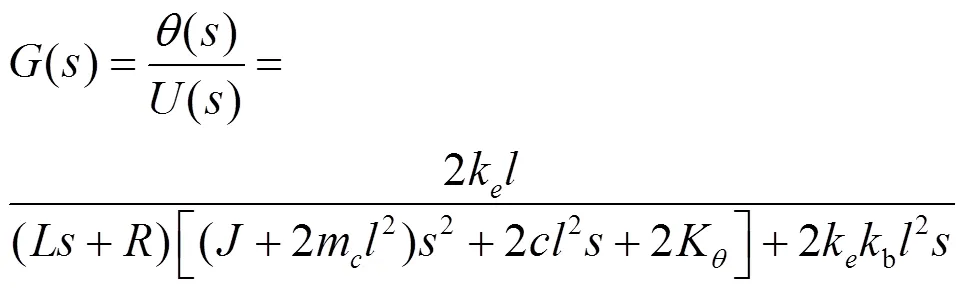
图6 音圈电机材料与结构优化出力曲线
Fig.6 Output curves of VCM material and structure optimization
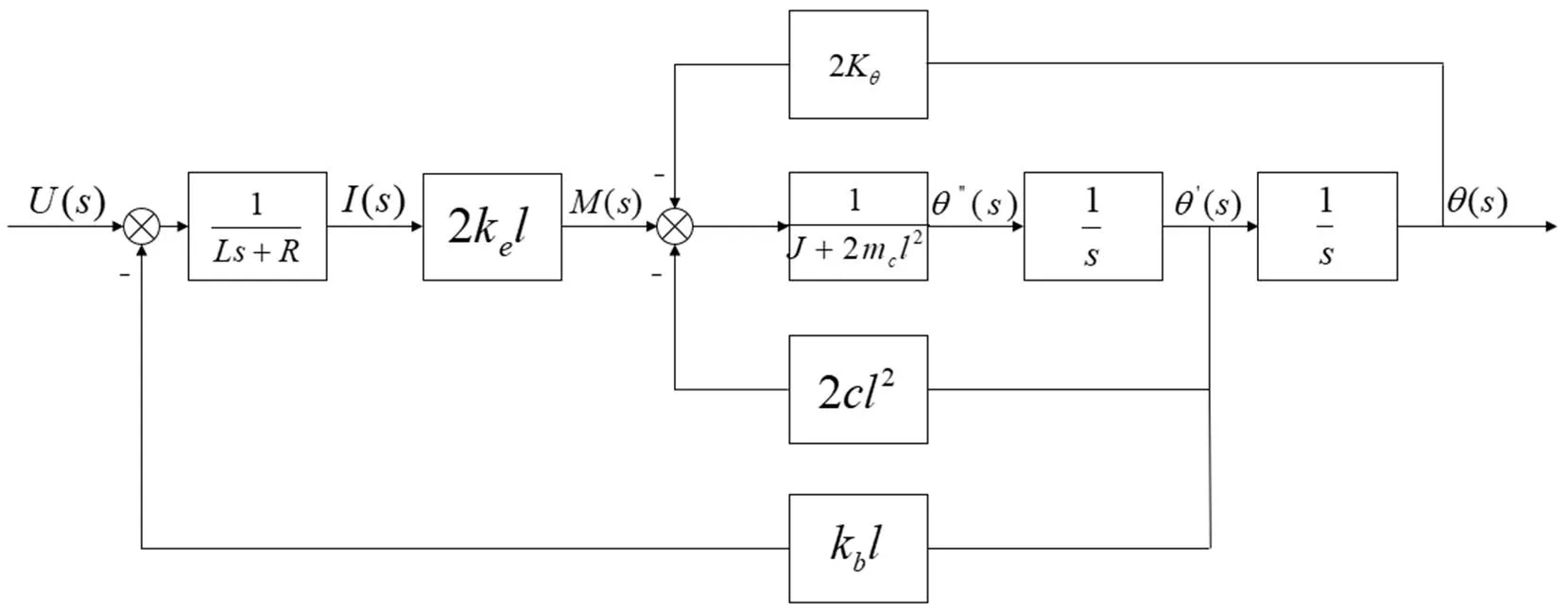
图7 快速反射镜的数学模型框图
2 快速反射镜的联合仿真模型与分析
要得到反射镜系统的动态响应性结果,首先将电磁模型、动力学模型组合得到电磁动力学联合仿真模型,获得频率响应特性;并在此基础上结合控制模块构成系统级的联合仿真模型,进行动态响应分析。快速反射镜联合仿真模型工作方框图如图8所示。
2.1 音圈驱动器的电磁仿真与电磁模型
在完成音圈驱动器材料与结构优化基础上进行电磁仿真得到电机的磁场分布云图(如图9(a)所示),结合磁场分析结果,驱动器的气隙磁场在定子端部比较高且均匀;采用长线圈的结构充分利用气隙磁场,同时保证力常数的均匀性。音圈电机输出的电磁力分布曲线如图9(b)所示。观察该曲线在电压激励下在以初始位置为中心的3mm运动范围内电磁力比较均匀,在3.1N左右,同时在这个范围内电机力常数约为1.74N/A。
利用JMAG分析软件中的音圈电机仿真模型,利用通过软件接口与Simulink连接,建立一个基于JMAG仿真结果的电磁模型,该模型的输入为电信号和动子位移,输出电磁力。
2.2 快速反射镜的结构动力学仿真和动力学模型
利用Adams软件对快速反射镜的结构动力学仿真分析,将反射镜、支座、基座以及音圈电机等部件视为刚体,柔性支撑机构利用有限元软件生成模态中性文件定义为柔性体导入Adams,得到反射镜完整的模型。首先开展模态分析(如图10所示),得到固有频率及振型。仿真结果显示系统一阶固有频率为21.3Hz,与理论计算结果21.99Hz相比误差仅为3.1%,模型不考虑高阶模态影响。在此基础上利用Adams中的振动仿真分析模块Vibration开展频率响应分析,得到如图11所示的扫频曲线,确定结构的输入输出关系[9],明确系统对外加激励的响应结果,观察曲线峰则可以确定系统在工作方向上的一阶谐振频率大小约为21.4Hz,与系统的模态分析的一阶频率基本一致。
在完成系统模态分析和频率响应分析的基础上,通过软件接口建立基于Adams动力学仿真结果的Simulink动力学模型,该模型输入为两个音圈电机的力,输出为反射镜转角。
2.3 电磁动力学联合仿真模型的建立与分析
通过软件接口分别建立了电磁模型和动力学模型后,将二者组成基于Simulink平台的电磁动力学联合仿真模型。在电磁动力学联合仿真模型的基础上通过扫频方式开展系统的频率响应特性分析,是后续设计合适的控制模型的基础。图12展示了进行频响分析的电磁动力学联合仿真模块,图13展示了电磁动力学联合仿真模型的频率响应特性曲线。
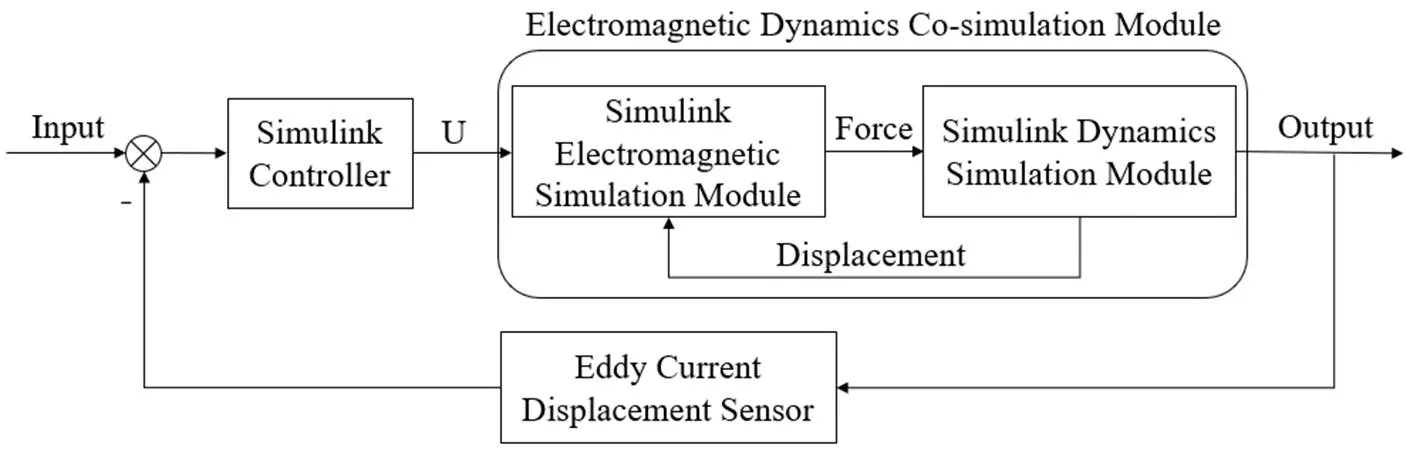
图8 快速反射镜联合仿真模型
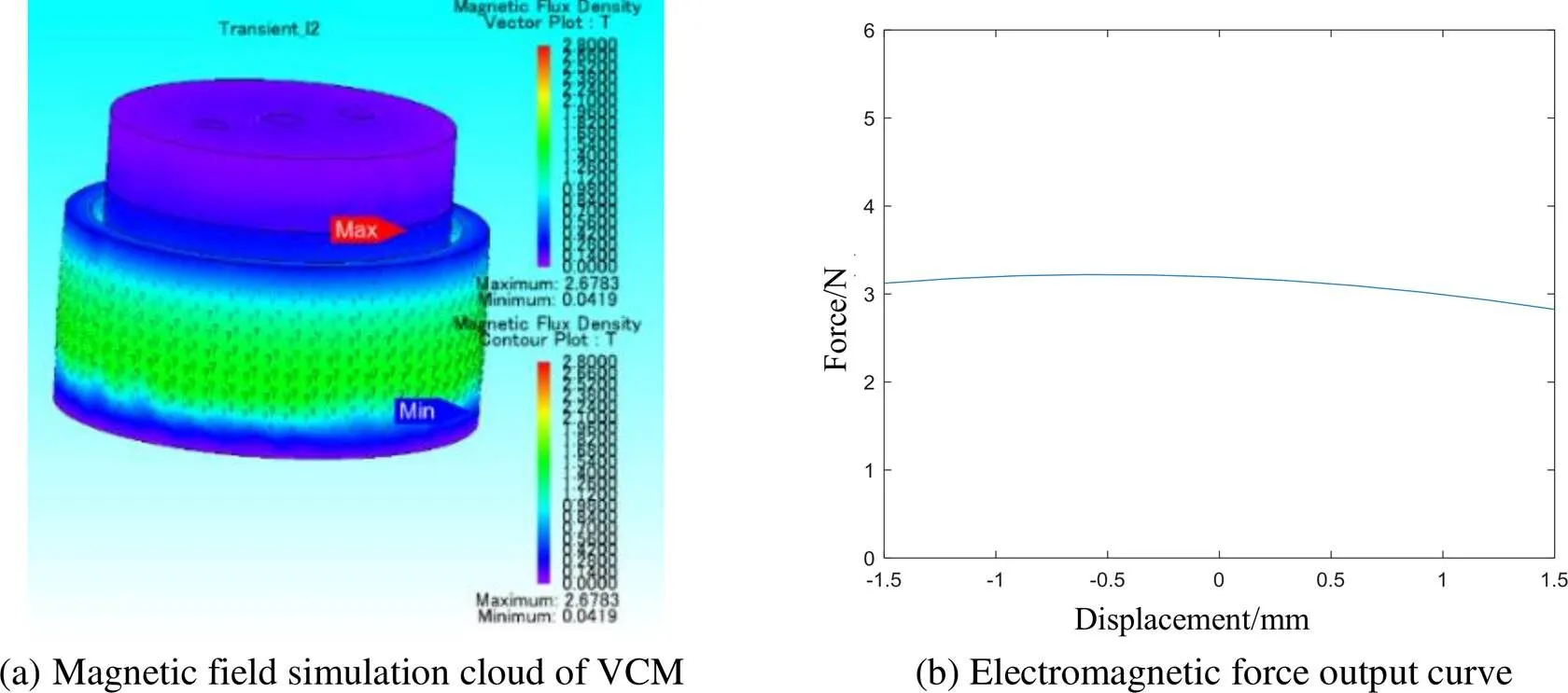
图9 音圈电机电磁仿真结果
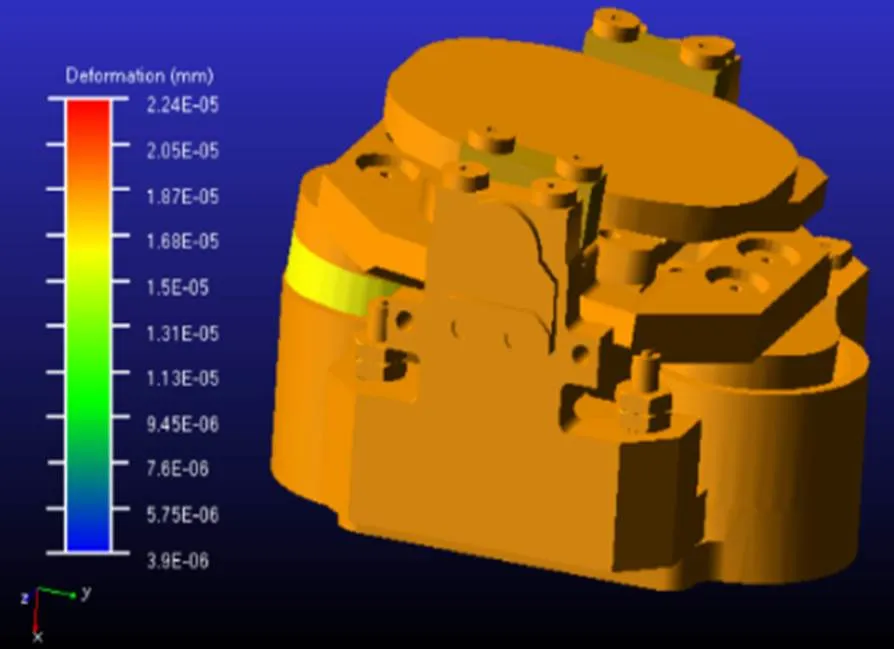
图10 快速反射镜的一阶模态结果
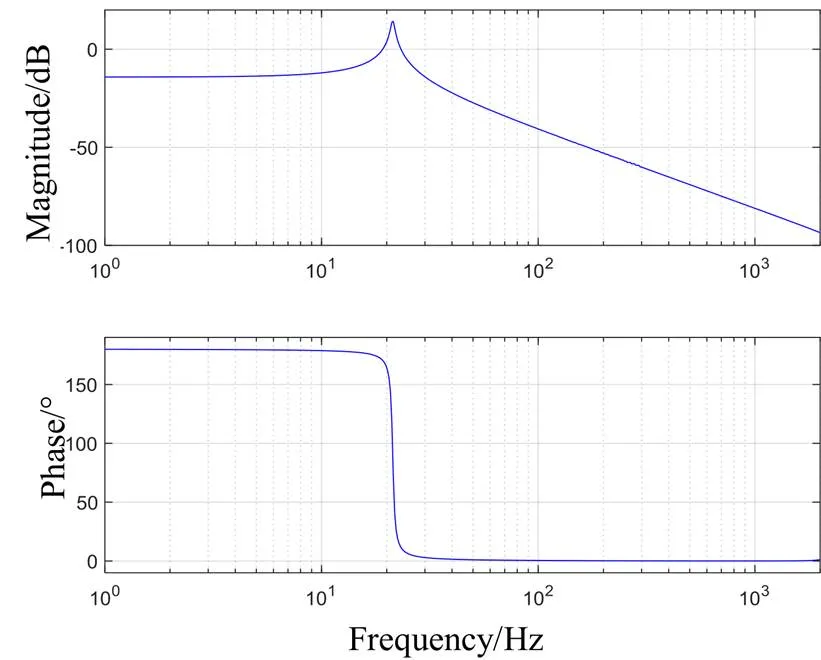
图11 快速反射镜的动力学扫频曲线
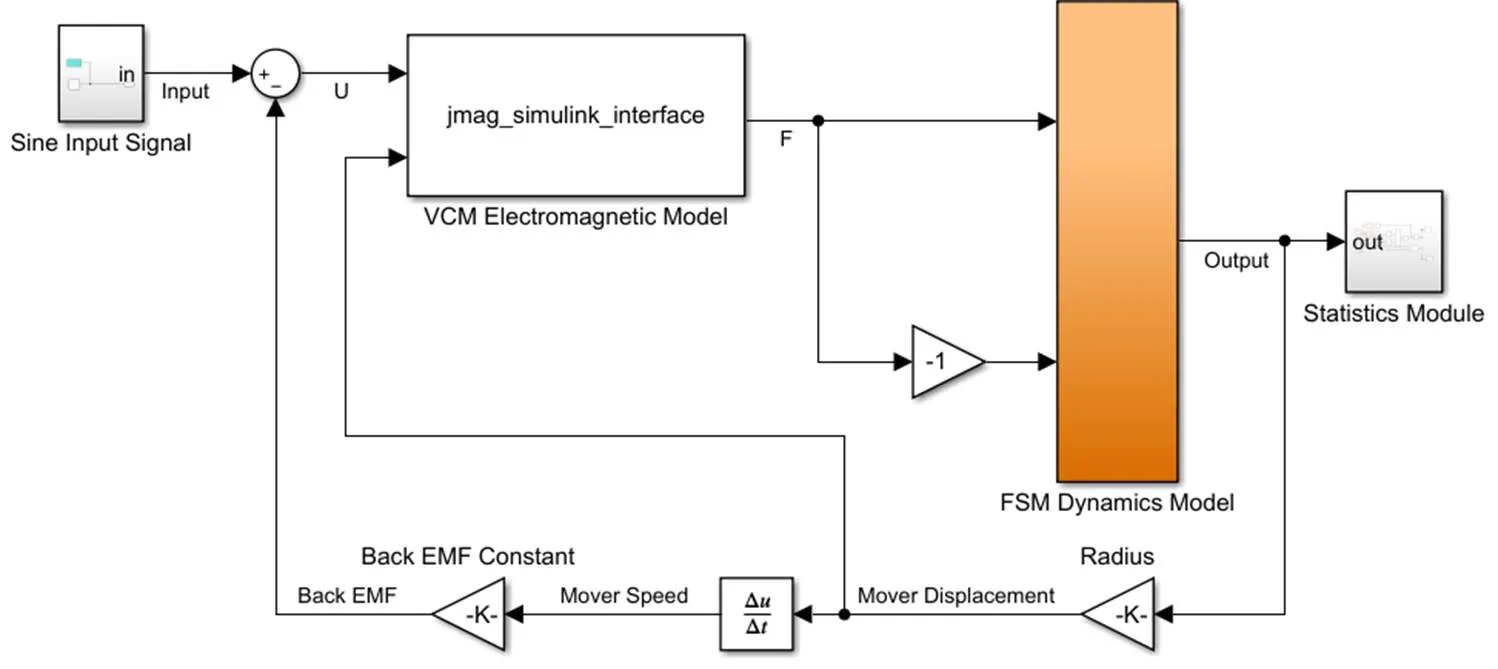
图12 开展频响分析的电磁动力学联合仿真模型
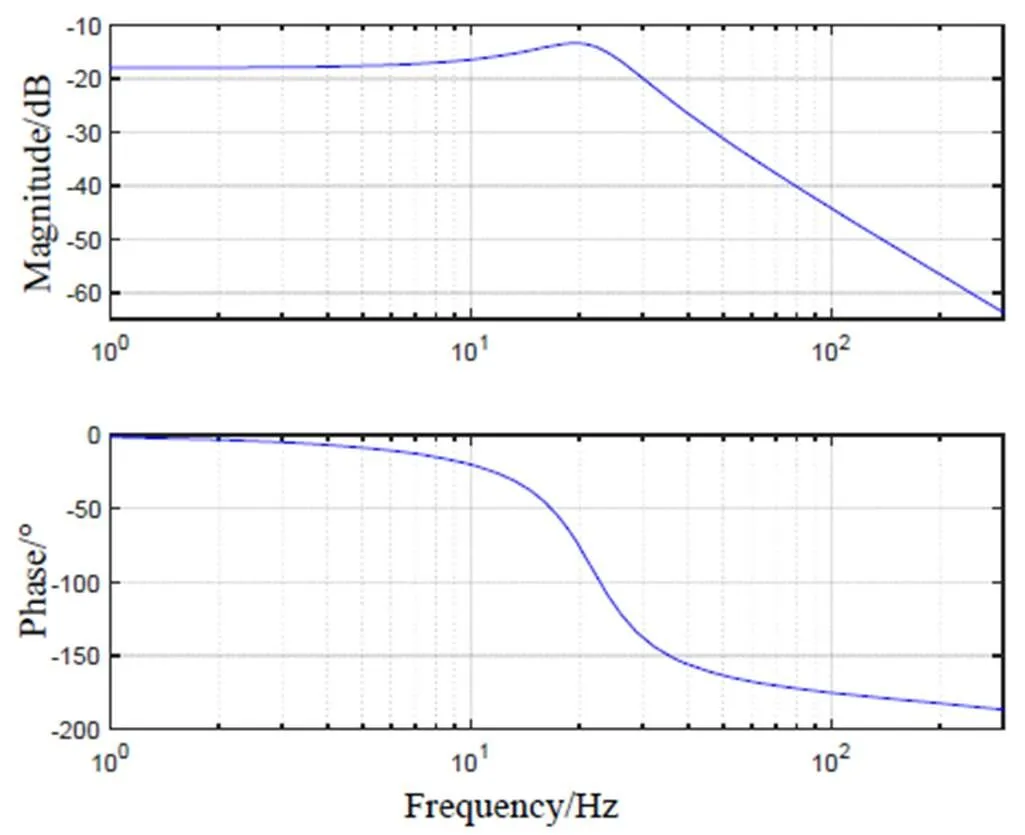
图13 电磁动力学联合仿真模型的频响特性曲线
相比于快速反射镜动力学扫频曲线,电磁动力学联合仿真模型在引入音圈电机作用后系统工作方向上谐振频率是基本不变的,仍出现在21Hz附近,但是频响特性曲线整体变得平缓,这是由于音圈电机相当于给系统引入一个惯性环节。
2.4 快速反射镜联合仿真模型与动态特性分析
利用电磁动力学联合仿真模型,根据系统的动态响应特性,结合工程经验进行控制模型的设计与仿真,构建系统联合仿真模型。PID控制算法是最简便易用的控制方法,结合PID控制器模型最终构成形成完整的控制-电磁-动力学联合仿真模型,如图14所示。
通过试凑法和临界比例度法[10]相结合的方式整定控制器参数。采用幅值为3mrad,频率为100Hz的正弦信号输入进行仿真,得到的正弦跟踪结果如图15(a)所示,经计算最大角加速度超过1480rad/s2,满足峰值角加速度不低于1131rad/s2的技术要求;采用50Hz的回扫驱动信号进行仿真,得到回扫仿真结果如图15(b)所示,回扫补偿运动存在相位滞后,时间差不超过0.5ms,通过分析在6ms积分时间内的回扫补偿残差为0.021mrad,满足0.03mrad的技术要求。
在完成正弦运动跟踪仿真与回扫运动仿真后,对闭环系统的开环频率响应特性进行分析,通过正弦扫频方式得到如图16的系统开环频响特性曲线。
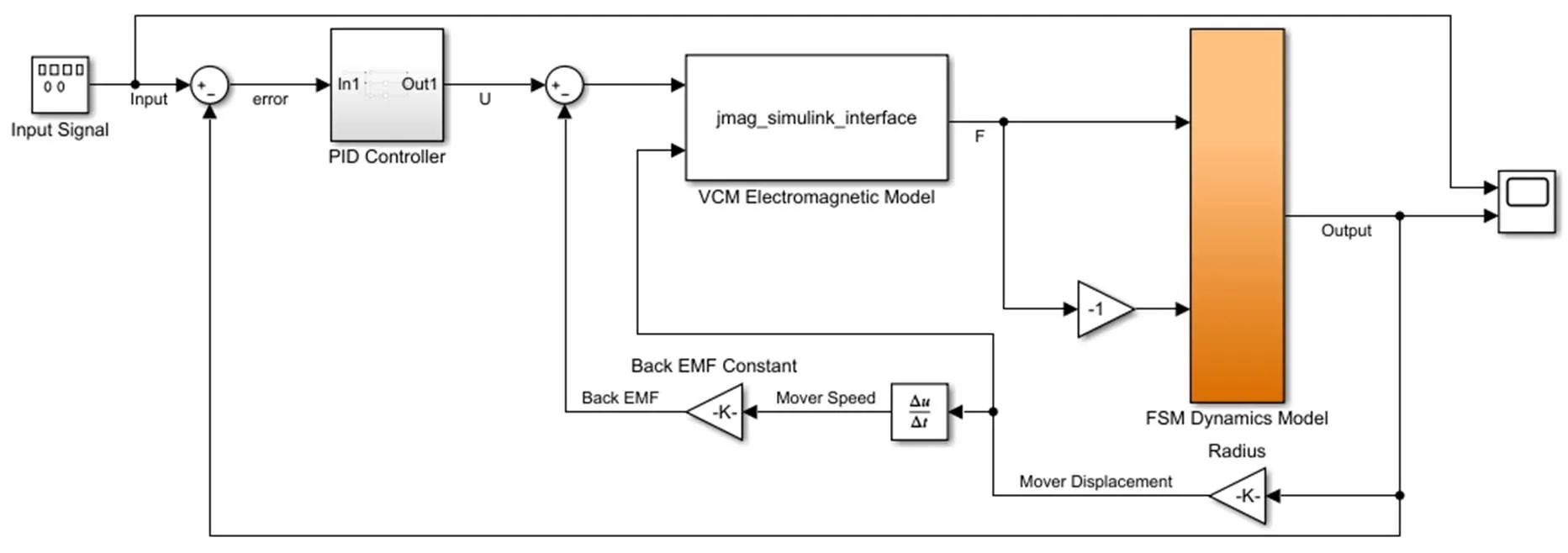
图14 基于Simulink的控制-电磁-动力学联合仿真模型
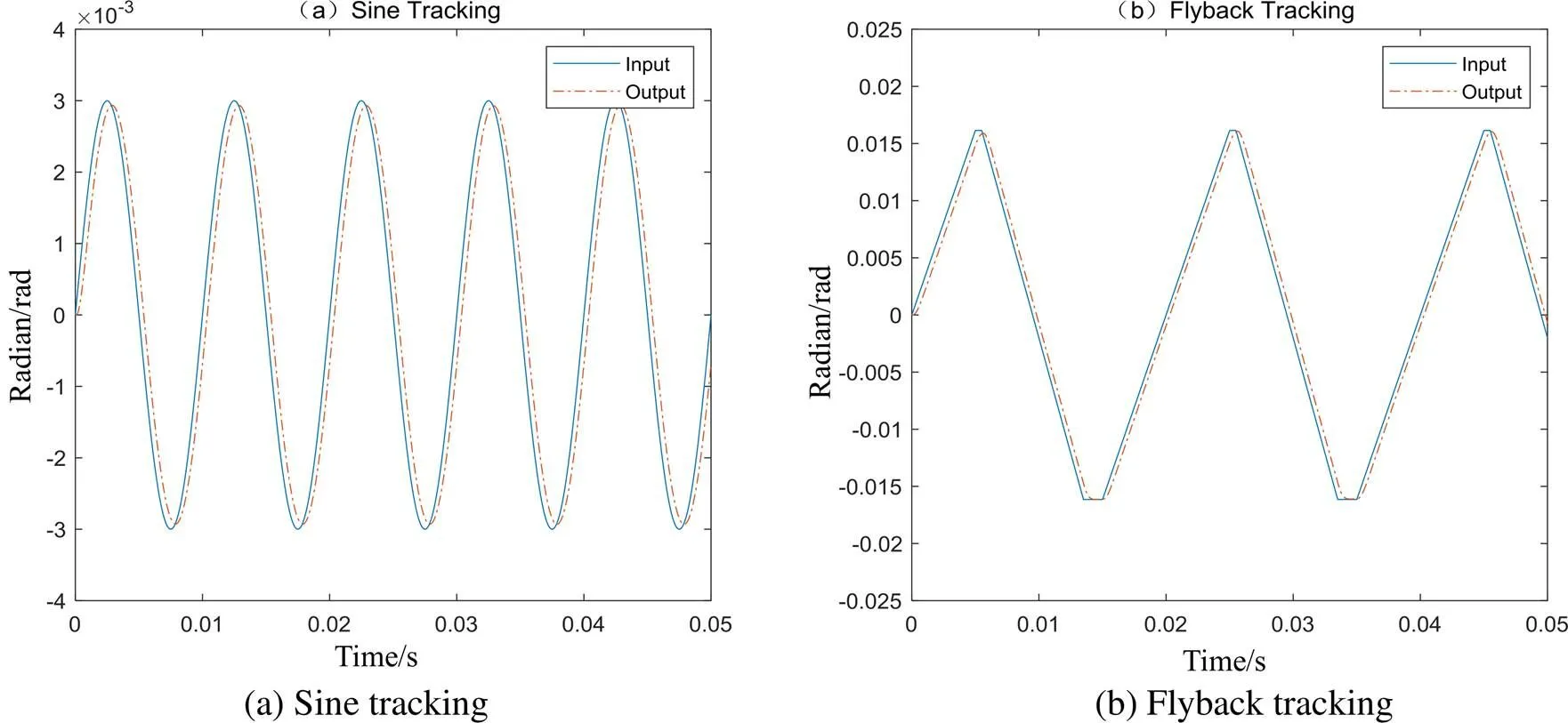
图15 联合仿真模型的跟踪响应
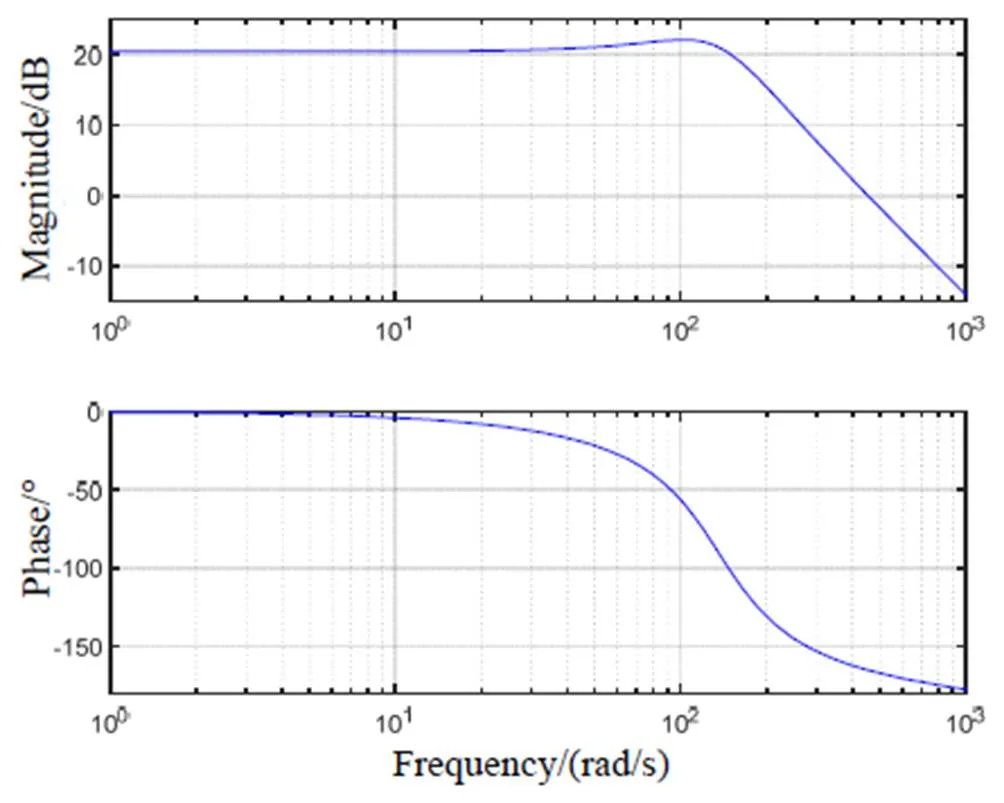
图16 联合仿真模型开环频响特性曲线图
3 快速反射镜动态特性实验分析
为了对联合仿真模型进行验证,制造了快速反射镜实物如图17所示,并进行同等条件的实验测试。针对回扫像移补偿,开展50Hz成像周期的测试,如图18为实测回扫补偿曲线结果,实测结果表明反射镜可实现最长7.6ms的回扫运动补偿,且积分时间内回扫补偿的残差为0.0365mrad,达到技术要求;此外通过测试可知,反射镜运动与指令相比存在2.6ms的相位延时,因此通过延时触发红外系统的积分成像,能够减小相位滞后对系统回扫补偿运动的影响。
此外经过正弦扫频实验得到实测开环频响曲线,由于实验测试输出的是电涡流传感器的电信号,相比于联合仿真模型的开环频响曲线,实测曲线相当于引入了一个增益系数,考虑增益系数后仿真模型与实测的开环频响曲线对比如图19所示。从对比结果中可知,仿真模型的开环频响曲线与实测曲线基本一致,在中低频范围内的幅值响应误差不超过10%。
4 结论
本文围绕机载红外搜索系统扫描像移回扫补偿快速反射镜的应用需求,提出一种基于音圈电机驱动和十字簧片传动结构的快速反射镜机电联合仿真技术。通过对快速反射镜的关键参数的建模与分析实现设计参数的快速迭代,结合软件通用接口构建了包含电磁驱动模型、结构动力学模型以及控制模型的联合仿真分析系统,并获得快速反射镜的动态仿真性能参数;为获得仿真模型的分析误差,设计了回扫补偿与开环频响测试的工况实验:经对比可知,在50Hz回扫补偿工作周期时,实测回扫补偿残差和相位滞后均大于仿真结果,但均能满足技术要求;开环频响曲线与实际测量结果曲线趋势基本一致,中低频阶段幅值响应误差不超过10%。对比结果表明联合仿真模型的有效性,该项技术的研究对于提高快速反射镜的研制性能和效率具有重要的理论意义。
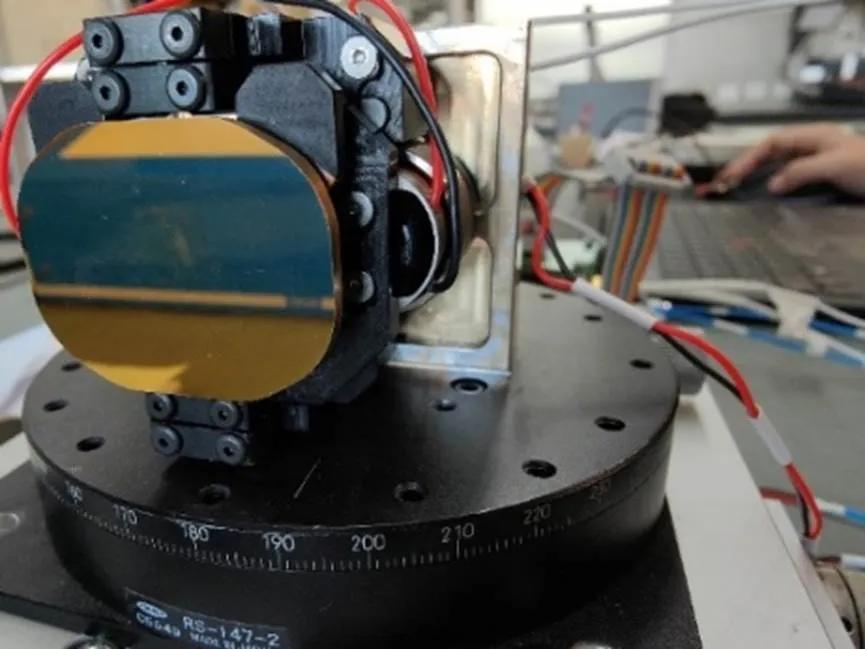
图17 快速反射镜实物实验
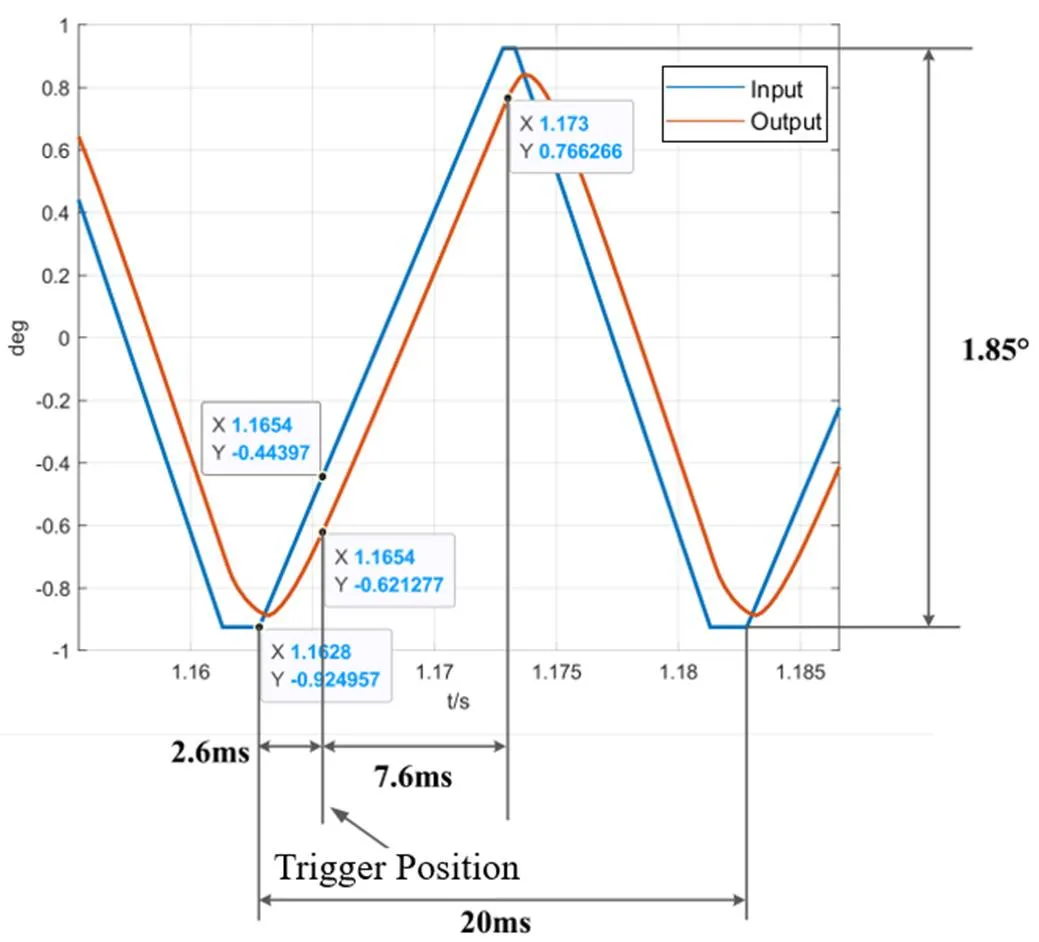
图18 快速反射镜实测回扫补偿曲线
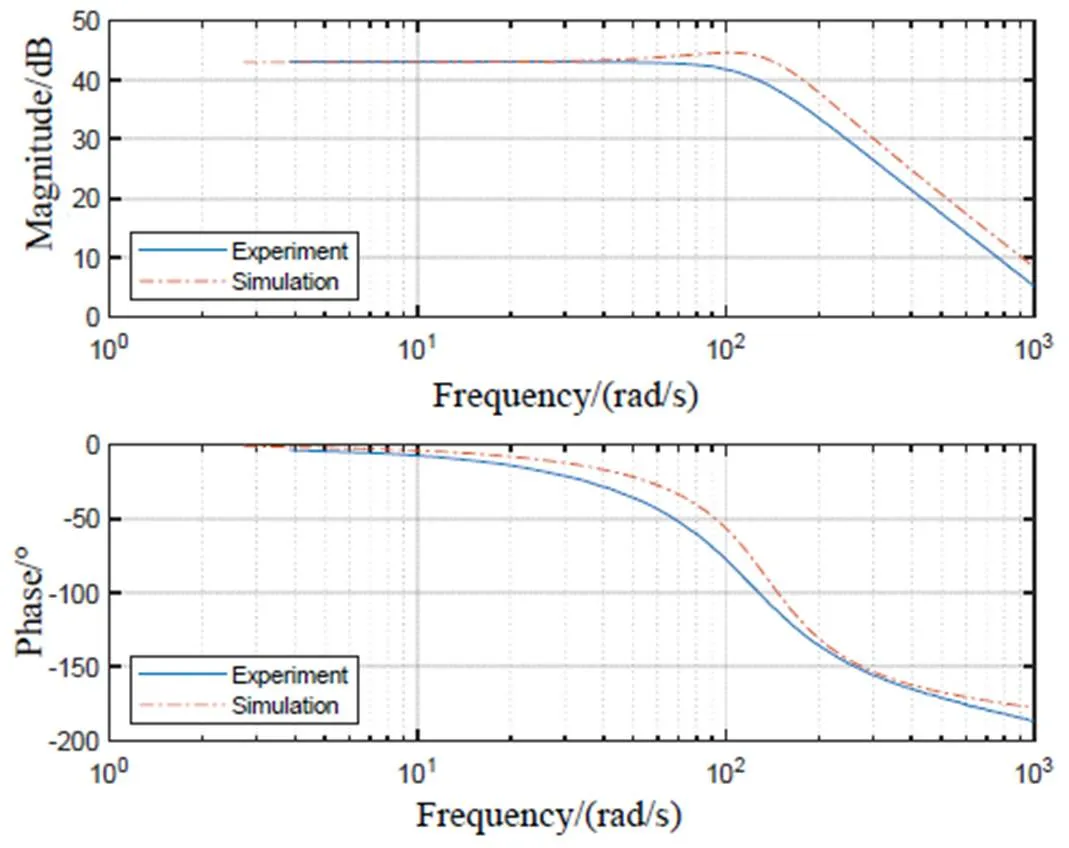
图19 实测与联合仿真模型开环频响曲线对比
[1] 王震, 程雪岷. 快速反射镜研究现状及未来发展[J]. 应用光学, 2019, 40(3): 373-379.
WANG Zhen, CHENG Xuemin. Research progress and development trend of fast steering mirror[J]., 2019, 40(3): 373-379.
[2] Loney G C. Design of a small-aperture steering mirror for high bandwidth acquisition and tracking[J]., 1990, 29(11): 1360-1366.
[3] Daniel J Kluk. An Advanced Fast Steering Mirror for Optical Communication[D]. Massachusetts: Massachusetts Institute of Technology, 2007.
[4] 刘力双, 夏润秋, 吕勇, 等. 音圈电机快速控制反射镜研究现状[J]. 激光杂志, 2020, 9(1): 1-7.
LIU Lishuang, XIA Runqiu, LV Yong, et al. Research situation of fast steering mirror driven by voice coil motor[J]., 2020, 9(1): 1-7.
[5] 王永辉. 快速控制反射镜结构及其动态特性的研究[D]. 长春: 中国科学院大学(长春光学精密机械与物理研究所), 2004.
WANG Yonghui. Research on Structure Design of Fast Steering Mirror and It’s Dynamic Characteristics[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, University of Chinese Academy of Sciences, 2018.
[6] WU X, CHEN S, SHI B, et al. High-powered voice coil actuator for fast steering mirror[J]., 2011, 50(2): 023002-023002-5.
[7] 黑沫,鲁亚飞,张智永等. 基于动力学模型的快速反射镜设计[J]. 光学精密工程, 2013(1): 57-65.
HEI Mo, LU Yafei, ZHANG Zhiyong, et al. Design of fast steering mirror based on dynamic model[J]., 2013(1): 57-65.
[8] 倪迎雪. 空间激光通信APT系统中快速反射镜关键技术研究[D]. 长春: 中国科学院大学(长春光学精密机械与物理研究所), 2018.
NI Yingxue. The Study of Fast Steering Mirror in the Acquisition, Pointing and Tracking System of the Space Laser Communication[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, University of Chinese Academy of Sciences, 2018.
[9] 刘重飞. 大口径与大转角压电快速控制反射镜设计与研究[D]. 上海: 中国科学院大学(上海技术物理研究所), 2018.
LIU Chongfei. Design and Research on Piezoelectric Fast Steering Mirror with Large Aperture and Deflection Angle[D]. Shanghai: Shanghai Institute of Technical Physics, University of Chinese Academy of Sciences, 2018.
[10] 于明星, 王瑛, 邵帅, 等. 基于Matlab的临界比例度法在工程PID参数自整定数值模拟中的应用[J]. 辽宁师专学报: 自然科学版, 2018, 2(1): 6-8.
YU Mingxing, WANG Ying, SHAO Shuai, et al. Application of critical proportioning method based on Matlab in PID parameters auto-tuning numerical simulation in engineering[J]., 2018, 2(1): 6-8.
Electromechanical Co-simulation Technology of Fast Steering Mirror Driven by Voice Coil Motor
ZHANG Yu1,2,XU Yongsen1,WANG Fuchao1,XU Yulei1,ZHOU Pingwei1
(1.,,,130033,; 2.,100049,)
To meet the design requirements of a fast steering mirror (FSM) for an infrared search system, the electromechanical co-simulation technology of FSM based on the cross-reed transmission structure and voice coil actuator was studied.An electromechanical parametric model of the FSM was established, the transmission stiffness model of the flexible structure was constructed by the finite element analysis, the working model of the voice coil motor was constructed, and the key design parameters were compared and iterated to determine the optimal design parameters. MATLAB/Simulink was used as a co-simulation platform to establish the FSM dynamics simulation and electromagnetic drive simulation interfaces, combined with the classical control model to realize the co-simulation of the FSM and obtain the simulation results of the system dynamic response.Finally, the flyback compensation residual and phase lag under a 50-Hz imaging period were verified experimentally. The results show that the measured flyback compensation residual is 0.0365mrad and the phase lag is 2.6ms, which are higher than the simulation analysis results but meet the requirements of engineering applications. The open-loop frequency response curve of the system was compared, and the mid-low frequency amplitude response error did not exceed 10%. The simulation and experimental results show that this co-simulation technology has important theoretical significance for the design and optimization of FSMs.
fast steering mirror, voice coil motor, co-simulation, structural analysis
TN219
A
1001-8891(2023)08-0814-08
2022-05-05;
2022-05-24.
张宇(1996-),男,河北石家庄人,硕士研究生,主要从事快速反射镜设计开发与优化等相关研究。E-mail:zyzhangyu1996@163.com。
许永森(1981-),男,博士,研究员,主要从事精密补偿与视轴校准等相关研究。E-mail:13844053159@163.com。
科技部国家重点研发计划(xxxxxxxxxx5805)。
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
现代仪器与医疗(2021年1期)2021-06-09 05:53:58
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:46
环境技术(2020年1期)2020-03-06 11:41:02
东坡赤壁诗词(2019年3期)2019-07-05 06:55:54
测控技术(2018年1期)2018-11-25 09:43:24
电子测试(2018年18期)2018-11-14 02:30:32
传感器与微系统(2018年7期)2018-08-29 00:44:36
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
