
油菜宽幅折叠式浅旋精量联合直播机设计与试验
2023-08-22 06:56廖庆喜廖宜涛韩静轩张青松
农业机械学报 2023年8期
康 艳 廖庆喜,2 廖宜涛,2 韩静轩 程 昊 张青松,2
(1.华中农业大学工学院, 武汉 430070; 2.农业农村部长江中下游农业装备重点实验室, 武汉 430070)
0 引言
长江中下游地区是我国主要的油菜产区,种植模式以稻油轮作为主,该地区油菜播种作业工序复杂且效率低下,播种后种子易落在秸秆残茬上,影响种子出苗率[1-3]。随着秸秆还田制度的推广应用,对稻茬田块进行少耕或免耕作业(保护性耕作)已成为一种新趋势[4-8]。为提高作业效率,设计一种宽幅高效的油菜直播机具有重要意义。
国内外学者针对保护性耕作进行了一系列研究[9],罗红旗等[10]设计了2BML型垄作免耕播种机,一次作业可完成浅旋灭茬、开沟、施肥、播种、镇压等免耕播种要求;胡红等[11]针对长江中下游稻麦轮作区稻茬田免耕播种小麦机具作业特点,设计了一种宽幅精量少耕播种机,有效提高了小麦播种效率。针对浅旋少耕的保护性耕作模式,姚文燕等[12]设计了一种浅旋清茬斜置式防堵装置,有效解决了小麦播种时开沟器堵塞问题;郑侃等[13]提出表土盖种-沟土匀摊的土壤分流式作业模式,设计了一种宽苗带小麦少耕播种机;王加一等[14]基于理论推导和农艺学测量,提出玉米条带式少耕的作业方式,有效降低了动土量和耕作阻力。部分专家学者针对开沟装置进行了结构优化改进[15-18],并结合动力驱动和非动力防堵装置相结合的方法设计免耕播种机,解决机具播种过程中的堵塞问题。国内学者针对免耕、少耕以及开沟机具的研究主要集中在玉米、小麦等作物,机具作业幅宽多为2 m或2.3 m,针对油菜宽幅高效式播种机研究较少。国外少免耕播种机[19-20]的土壤耕作部件以被动式为主,不适用于长江中下游地区黏重土壤工况。
为解决长江中下游地区油菜播种作业工序复杂、效率低的问题,结合保护性耕作理念与机具宽幅高效的特点,本文设计一种适用于稻油轮作区宽幅、可折叠的油菜浅旋式精量联合直播机,一次作业可实现开畦沟、浅旋灭茬、油菜精量播种、种床覆土等功能,以期为提高油菜播种作业效率的机具设计提供参考。
1 总体结构与工作过程
1.1 总体结构组成
油菜宽幅折叠式浅旋精量联合直播机主要由机架、浅旋刀辊、液压折叠系统、开沟装置、排种系统等组成,整机结构如图1所示,其中开沟装置与浅旋刀辊组成的开沟浅旋灭茬装置、液压折叠系统是机具作业时实现宽幅可折叠和开沟浅旋灭茬作业的关键部件。该机具包括左右两组开沟浅旋灭茬装置,通过液压折叠系统实现翻折,每一组开沟浅旋灭茬装置的折叠由两个液压缸同时驱动,后置两组机械离心式油菜精量排种器。整机主要技术参数如表1所示。
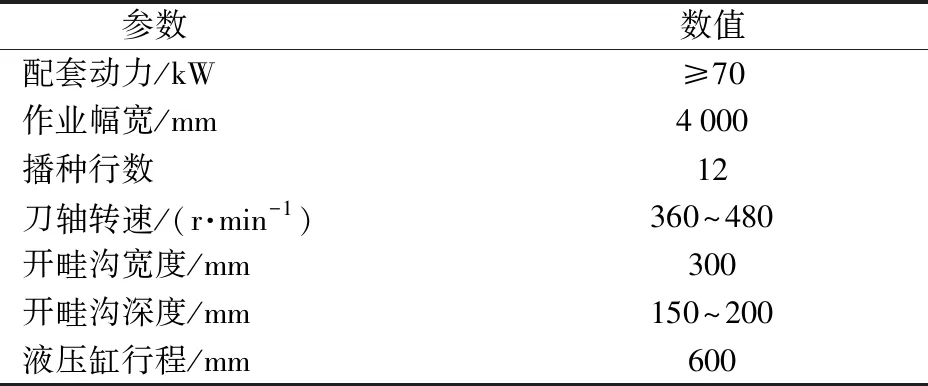
表1 主要技术参数Tab.1 Main technical parameters
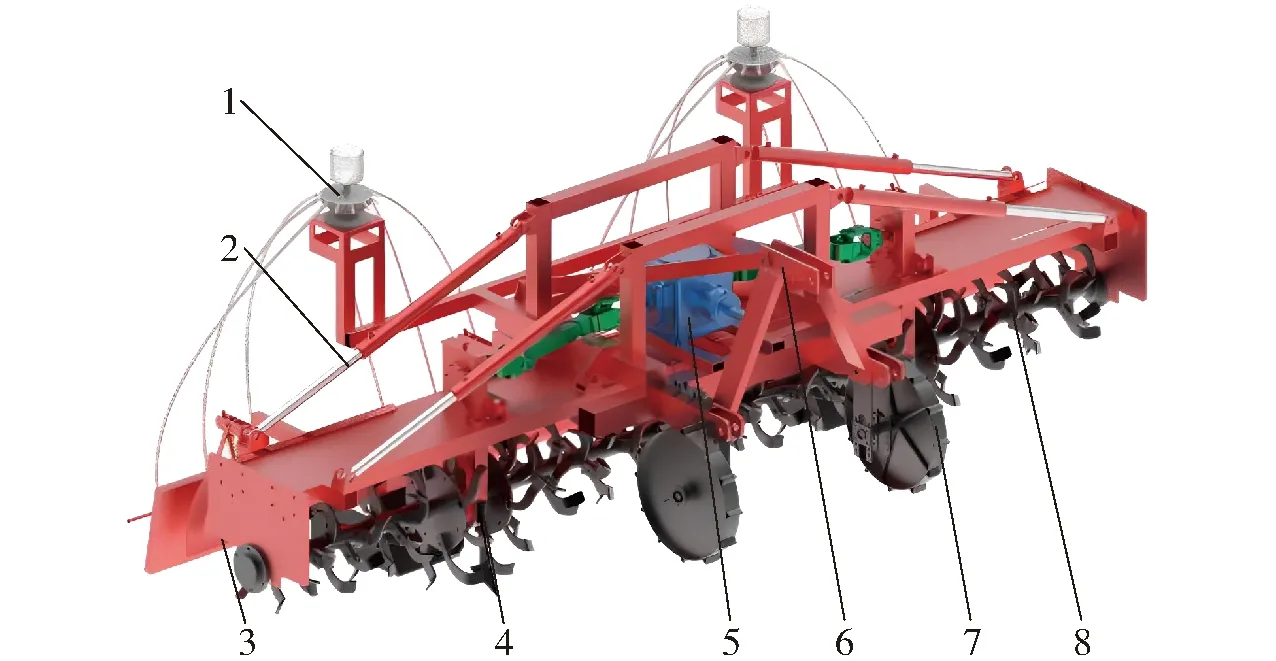
图1 油菜宽幅折叠式浅旋精量联合直播机结构示意图Fig.1 Schematic of rapeseed wide-width folding shallow-rotation combined precision direct seeder1.排种系统 2.液压折叠系统 3.分土导流板 4.开沟装置 5.齿轮箱 6.机架 7.限深地轮 8.浅旋刀辊
1.2 工作过程
油菜宽幅折叠式浅旋精量联合直播机通过三点悬挂装置与拖拉机挂接,由拖拉机提供液压油,依托液压折叠控制系统,实现机具的折叠与平放。运输时,将机具提升并折叠,在作业前将机具平放,作业过程中由拖拉机输出轴提供动力,经中央传动箱、万向传动轴带动浅旋刀辊和开沟装置运行,浅旋刀辊旋转灭茬、开沟装置开出畦沟并将沟土经由分土导流板均匀覆于厢面,为油菜播种提供适宜的种床条件;后置两组机械离心式油菜精量排种器,机具一次下地作业可实现开畦沟、浅旋灭茬、精量播种、种床覆土等工序,完成幅宽4 000 mm共12行油菜播种作业,作业工艺图如图2所示。
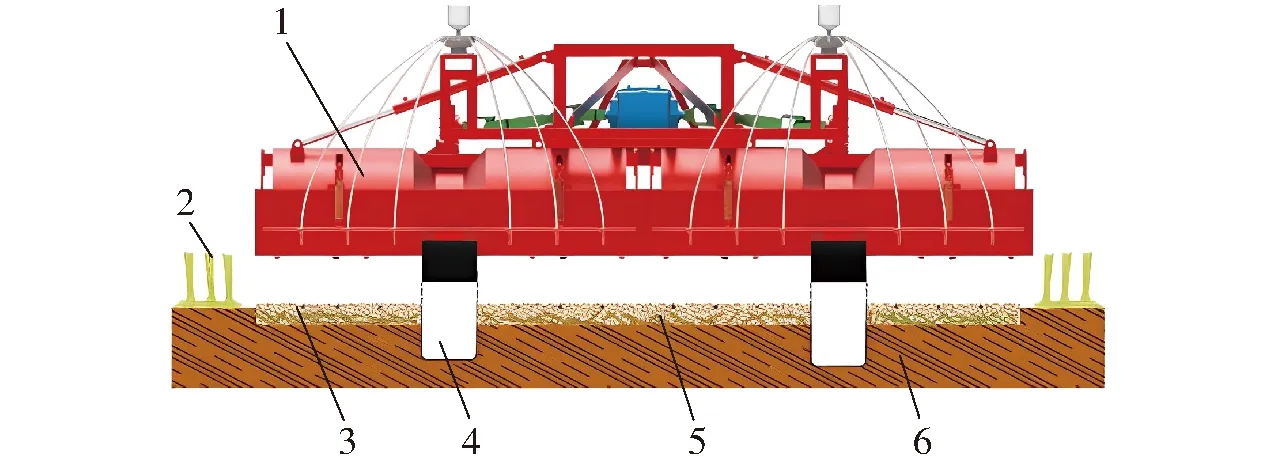
图2 油菜宽幅折叠式浅旋精量联合直播机作业工艺图Fig.2 Operation process drawing of rapeseed wide-width folding shallow-rotation combined precision direct seeder1.油菜宽幅折叠式浅旋精量联合直播机 2.水稻秸秆 3.油菜种子 4.排水畦沟 5.已旋耕土壤层 6.未旋耕土壤层
2 关键部件设计与分析
2.1 液压折叠系统
2.1.1液压折叠系统结构布局与自由度
现有折叠式旋耕机有后翻折叠、侧翻折叠两种形式,油菜宽幅折叠式浅旋精量联合直播机每一组折叠部分包括开沟装置和浅旋刀辊,折叠部分质量占据整机的70%以上,采用后翻折叠方式,折叠状态下整机重心过于靠后,影响田间通过性,故本文采用侧翻折叠的形式对液压折叠系统进行设计。
根据机具幅宽和折叠作业要求,初定液压缸位置和整机结构布局如图3所示,其中点A1、B1、C1、A2、B2、C2为各部件的铰接点。两侧开沟浅旋灭茬装置分别以主机架的铰接点C1、C2为旋转中心,液压缸收缩带动点A1、A2做圆周运动完成折叠过程。
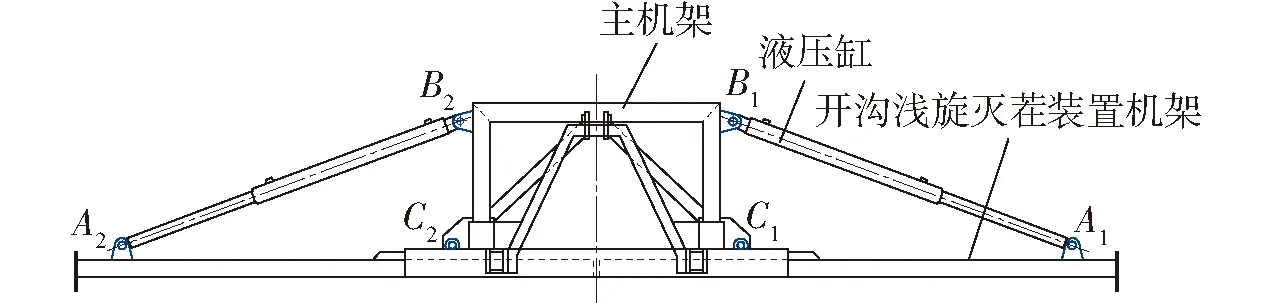
图3 液压折叠系统结构布局示意图Fig.3 Structural layout diagram of hydraulic folding system
为保证液压折叠系统能够正常以旋转中心做圆周运动,其折叠机构自由度应为1,即机构具有唯一确定的运动路径,满足机组平放与折叠运动要求。以液压折叠系统一侧为例,计算折叠机构自由度:开沟浅旋灭茬装置整体可视为一个活动构件,液压油缸在运动过程中可视为活塞杆、缸体两个活动构件,二者为面与面接触的低副约束,则折叠机构一侧共有4个低副约束,由
Fn=3n′-2Pl-Ph
(1)
式中Fn——机构自由度
n′——活动构件数
Pl——低副数目Ph——高副数目
计算得自由度为1,符合运动要求。
液压缸行程由开沟浅旋灭茬装置运动范围决定,根据设计要求,液压缸带动开沟浅旋灭茬装置沿杆长方向双向运动,有效行程要求较长,故采用双向作用单活塞杆液压缸。为保证机具在平放状态下两侧开沟浅旋灭茬装置均处于水平位置,消除两侧液压缸因运动速度差异造成两组开沟浅旋灭茬装置在平放状态下不对称而影响作业厢面平整度的问题,液压缸伸缩极限位置需分别与开沟浅旋灭茬装置平放、折叠状态相对应。以一侧液压缸为例,分析开沟浅旋灭茬装置折叠极限位置(平放与折叠),确定液压缸行程,如图4所示。
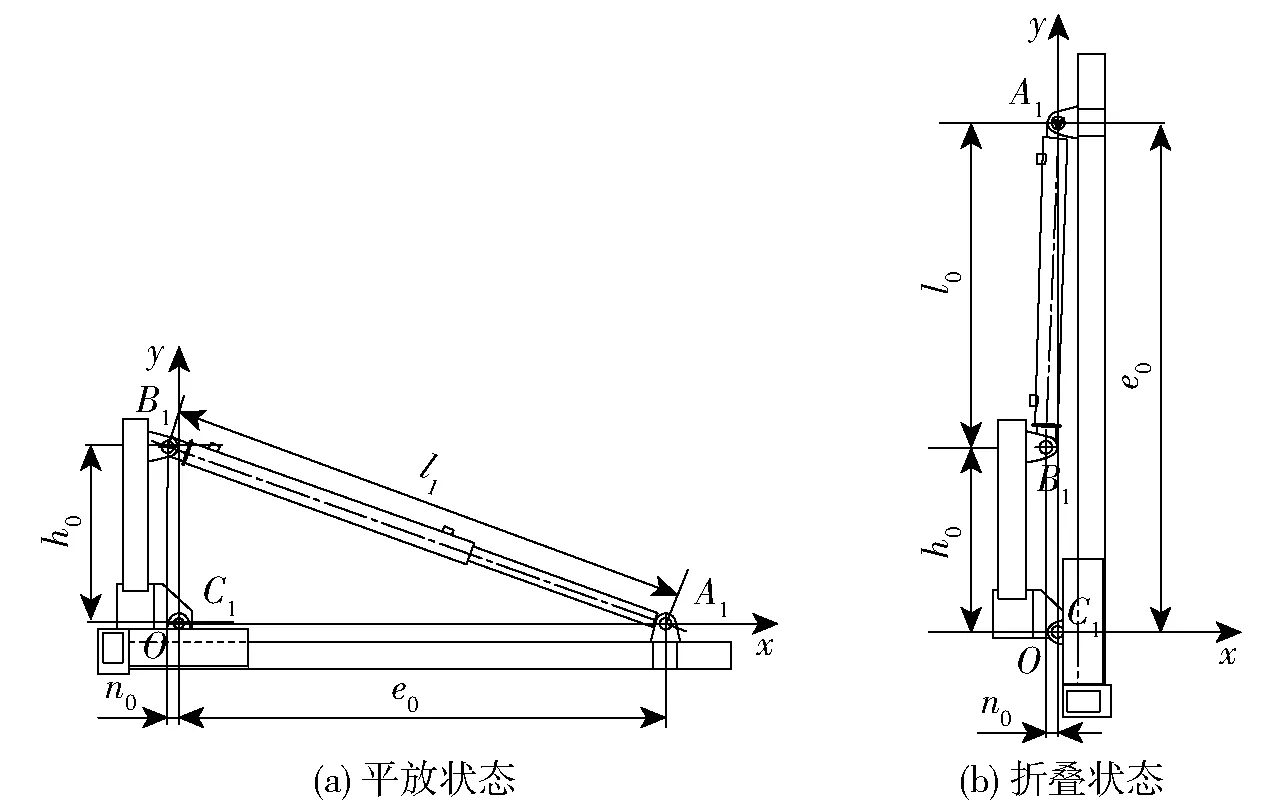
图4 液压折叠系统极限位置示意图Fig.4 Sketches of limit position of hydraulic folding system
液压缸驱动开沟浅旋灭茬装置在第一连接座孔中心(A1)、第二连接座孔中心(B1)、旋转中心(C1)3点构成的平面内绕旋转中心(C1)翻转。以水平方向为x方向,竖直向上方向为y方向,铰接点C1为原点,建立坐标系如图4a所示。考虑机具实际尺寸,初步选取铰接点A1到铰接点C1的水平距离e0为1 280 mm,点B1到点C1的水平距离n0为30 mm,设液压缸行程为s,参考液压缸设计准则[21-22],在两极限位置下液压缸两安装孔轴心距离分别为l0=s+270、l1=2s+270,根据各设定值和两极限位置几何关系,构建关于行程s与B1C1之间距离h0的方程
(2)
利用Matlab计算得到方程4组有效解:①h0=2 601.2 mm,s=-1 591.2 mm。②h0=452.1 mm,s=557.9 mm。③h0=677.6 mm,s=-872.4 mm。④h0=3 095.8 mm,s=1 545.8 mm。
根据整机结构布局,结合液压缸标准缸型行程尺寸对结果进行分析后优化取整,确定B1C1之间距离h0为470 mm、液压缸行程s为600 mm。为使液压缸处于伸长极限位置时两侧开沟浅旋灭茬装置均处于水平状态,根据设计的液压缸行程,调整铰接点A1到铰接点C1的水平距离e0为1 338 mm,点B1到点C1的水平距离n0为55 mm。
2.1.2液压缸结构参数设计与受力分析
为确定机具折叠过程中液压缸所受载荷,根据整体布局和液压缸行程参数对一侧液压缸进行分析,运动示意图如图5a所示。开沟浅旋灭茬装置折叠时运动速度缓慢,可将折叠过程中每一瞬间看作一个平衡位置。
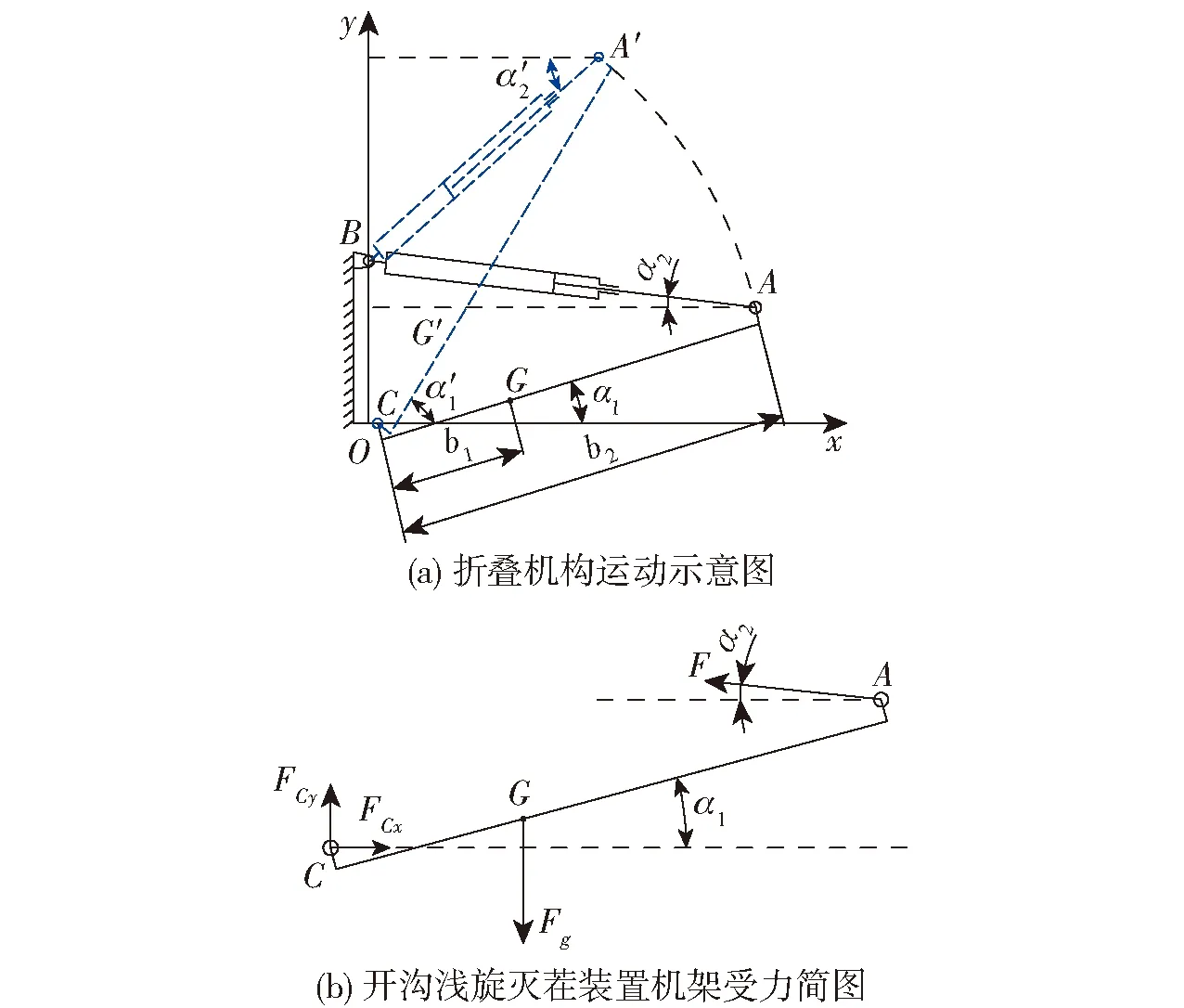
图5 液压折叠系统运动受力分析示意图Fig.5 Schematics of motion force analysis of hydraulic folding system
忽略液压缸自身重力,将其视为二力杆,对开沟浅旋灭茬装置AC进行受力分析,如图5b所示,根据力矩平衡原理对旋转中心点C取矩,当开沟浅旋灭茬装置转角为α1时可得
(3)
式中F——液压缸对开沟浅旋灭茬装置拉力,N
Fg——开沟浅旋灭茬装置所受重力,N
α2——液压缸与水平线所夹锐角,(°)
b1——旋转中心C与质心G之间距离,mm
b2——液压缸铰接点A与旋转中心C之间距离,mm
设点A坐标(xA,yA),点B坐标(xB,yB),则有
(4)
其中
(5)
根据开沟浅旋灭茬装置所受重力以及质心位置和液压缸相关结构参数确定Fg为4 905 N,b1为454 mm,b2为1 338 mm,将各数值代入式(3)中,机具折叠过程中液压缸受力变化曲线如图6所示。
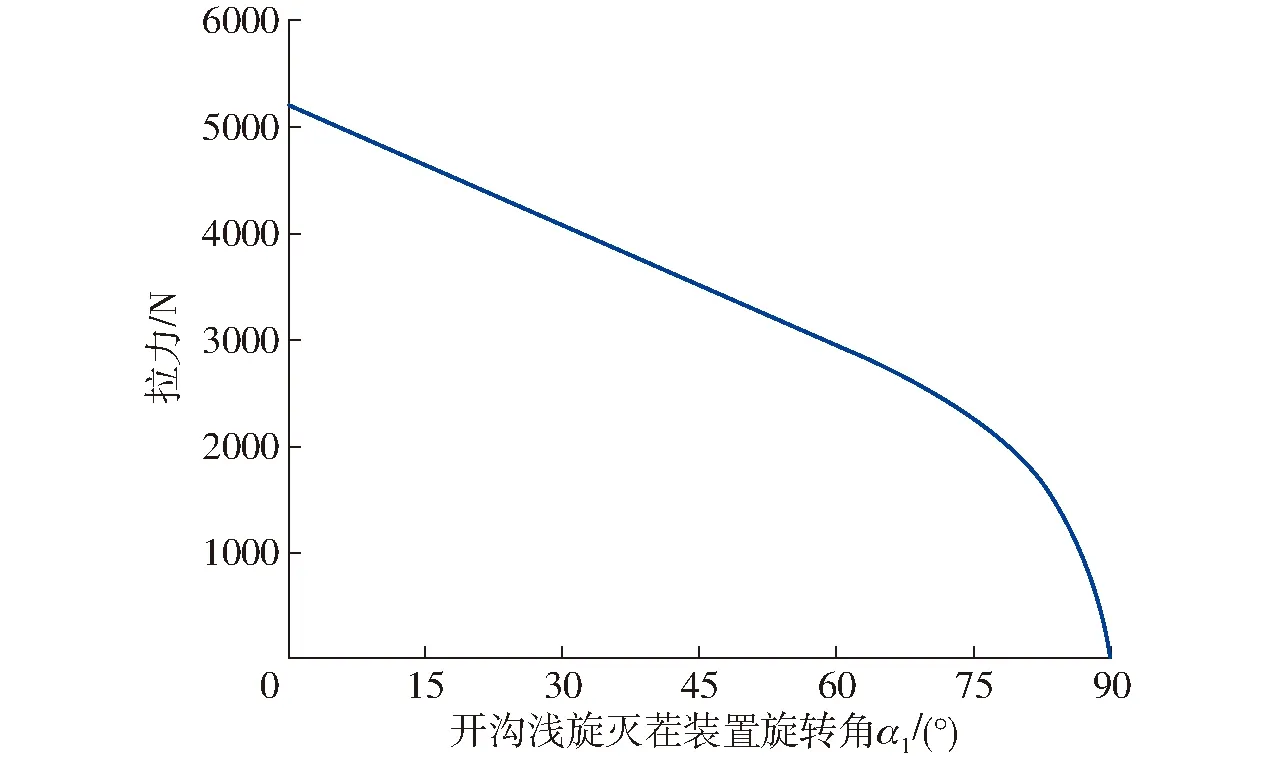
图6 液压缸受力变化曲线Fig.6 Trend of force changes in hydraulic cylinders
由图6可知,机具在折叠过程中,当α1为0°,即当开沟浅旋灭茬装置处于水平位置时,液压缸受力最大,最大值为5 206 N。当机具在田间作业时,两侧开沟浅旋灭茬装置处于水平位置,进一步分析机组在田间作业过程中液压缸的受力情况,保证机具在旋耕播种作业过程中整机稳定性。
旋耕刀轴的单刀阻扭矩变化波动较大,刀轴的阻扭矩T由相继入土的各单刀阻扭矩合成,波动幅度较小,故在此分析浅旋刀轴切土阻力Z。将切土阻力Z视为在刀轴上的均布载荷,近似计算刀轴的平均切土阻力Z及其分力。图7为浅旋刀辊受力示意图,图中点P为切土阻力Z作用点,端点回转半径为R的旋耕弯刀切土时,其切土阻力合力的作用点半径ROP=0.9R,则
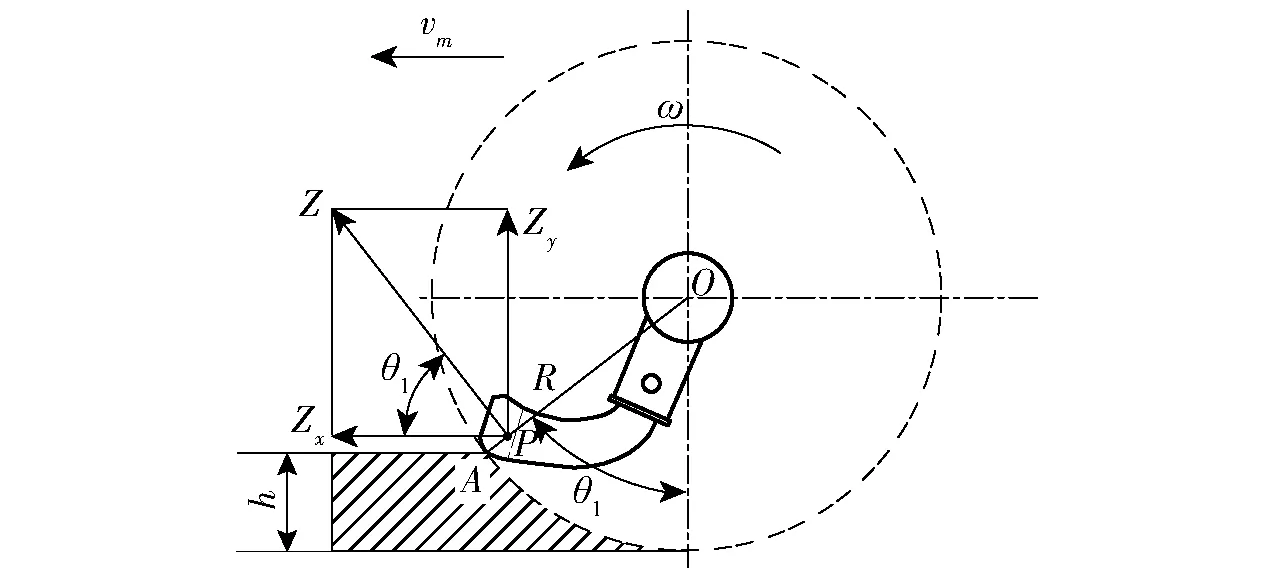
图7 浅旋刀辊受力示意图Fig.7 Schematic of force on shallow rotary tool roll
(6)
式中Zx——切土阻力水平分力,N
Zy——切土阻力竖直分力,N
θ1——切土阻力Z与水平方向所夹锐角,(°)
切土阻力的水平分力Zx对液压缸所受载荷基本无影响,田间作业工况下影响液压缸受力的主要因素为刀轴阻力在竖直方向的分力Zy。Zy始终垂直地面向上,对开沟浅旋灭茬装置起到支撑作用;同理,开沟刀盘切土时其竖直方向阻力也始终垂直地面向上,结合式(3)可知,在田间作业过程中单侧液压缸受到的作用力小于液压缸在水平静止状态下受到的最大作用力5 206 N;为保证机具稳定运行,整机采用对称结构,为避免单个液压缸受力过大,左右可折叠部分均采用2个均布的液压缸,有效保证整机稳定性。
参考《农业机械设计手册》[23]中拖拉机液压输出压力,初定液压缸工作压力p为1.6×106Pa。为防止折叠过程中压力突变造成机具大幅抖动,回油路安装背压阀,参考液压与气压传动中液压缸参考背压表(表2)[24],初选背压pb为8×105Pa。
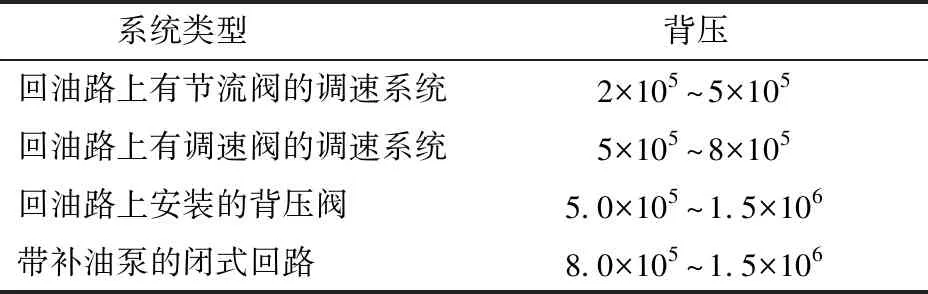
表2 液压缸参考背压Tab.2 Hydraulic cylinder reference back pressure Pa
根据《现代机械设计手册》[22]可知液压缸缸筒内径Dy计算式为
(7)

(8)
式中Fmax——最大负载,N
p1——液压缸工作压力,Pa
代入各值可得Dy为53.62 mm,根据活塞杆受力状态,当p1<5×106Pa,此时活塞杆直径d=(0.5~0.55)Dy,代入Dy值,可得d=(26.81~29.49) mm,为保证结构稳定性,综合考虑各参数向上取整,确定液压缸筒内径Dy为60 mm,活塞杆直径d为30 mm。根据设计所得参数对液压缸所能承受的负载Fe进行计算,将各值代入
(9)
可得Fe为3 392.9 N,是实际液压缸承受最大负载(2 603 N)的1.3倍,满足油菜直播机折叠时的作业需求。
2.1.3液压控制系统设计与分析
为实现油菜直播机由拖拉机液压控制系统进行调节控制的折叠要求,设计液压系统控制回路如图8所示。
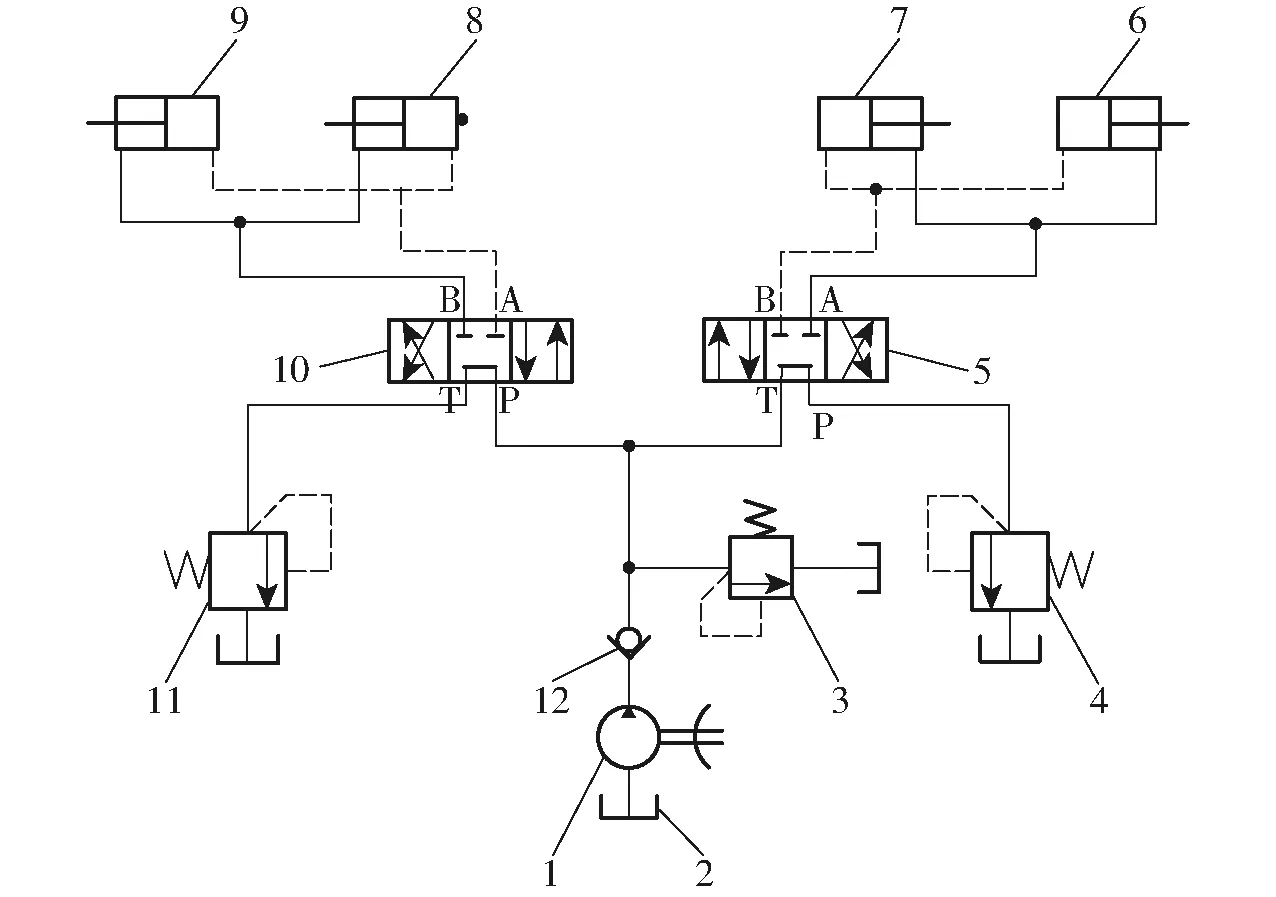
图8 液压折叠系统液压控制回路Fig.8 Hydraulic folding system hydraulic control loop1.拖拉机油泵 2.拖拉机液压油箱 3.直动式溢流阀 4、11.背压阀 5、10.M型三位四通换向阀 6~9.双向活塞液压缸 12.单向阀
该系统中包括双向活塞液压缸、M型三位四通换向阀、单向阀、直动式溢流阀、拖拉机油泵等液压元件。其中双向活塞液压缸在液压系统中为执行元件,其往复运动可直接实现机具左右两侧开沟浅旋灭茬装置的翻折;M型三位四通换向阀处于中位时,液压泵可卸荷,启停平稳,可多个并联作业,通过手柄的操控实现工作状态的转变。单向阀在液压系统进油路允许液压油单向流动防止泵回油;直动式溢流阀在整个液压系统中可以起到调节主油路压力的作用,当油路压力超过溢流阀预设压力时,可与油箱连通卸压,同时起到液压系统安全阀的作用;直动式溢流阀4、11在液压回路中充当背压阀作用,使液压回路维持一定背压值,与M型三位四通换向阀在中位时构成液压卸载回路;基于此系统,实现油菜直播机的折叠与平放的作业要求。
机组处于田间作业状态时,液压系统中的2个M型三位四通换向阀均处于中位,提升液压缸无法执行伸缩动作,即两组开沟浅旋灭茬装置在作业过程中始终保持水平状态,保证了宽幅作业的厢面平整度。
2.2 开沟浅旋灭茬装置设计与参数
开沟浅旋灭茬装置结构如图9所示,主要包括机架、齿轮箱、开沟刀盘、浅旋刀辊、分土犁尖、分土导流板、仿形清沟铲等部件。作业过程中,分土犁尖首先接触地表,将开沟刀盘间的土壤分散至两侧,畦沟区域土壤在开沟刀作用下经分土导流板均匀覆盖至厢面,后端仿形清沟铲将沟内余土清除,完成开沟作业。同时浅旋刀辊对地表进行灭茬处理,使稻茬与沟土混合覆于地表;随后由平土托板平整覆土层,为油菜播种提供良好的种床条件。
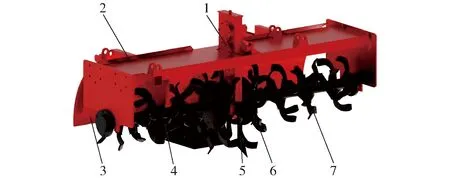
图9 开沟浅旋灭茬装置结构示意图Fig.9 Structure diagram of ditching and shallow rotation stubble removal device1.齿轮箱 2.机架 3.分土导流板 4.仿形清沟铲 5.分土犁尖 6.开沟刀盘 7.浅旋刀辊
2.2.1开沟刀盘设计与机组运行参数
根据相关农艺要求[23],设定油菜种植畦沟深度为150~200 mm,宽度为300 mm,沟型为矩形沟;为实现浅旋灭茬作业要求,设定旋耕作业深度为5~55 mm。为保证开沟质量,采用左右双刀盘完成开沟作业,开沟刀安装在刀盘双侧,避免刀盘侧壁与沟壁直接摩擦造成畦沟塌陷,两侧刀片交替切割土壤,完成刀盘宽度范围内土垡切抛,开沟刀盘结构如图10所示。

图10 开沟刀盘结构示意图Fig.10 Structure diagram of trenching cutter head1.齿轮箱 2.开沟刀盘 3.分土前犁
为保证机具的适用性与互换性,刀具均采用标准旋耕刀具,其中浅旋灭茬刀辊安装标准175浅旋刀,开沟刀盘安装标准195旋耕刀,确定开沟回转半径和浅旋刀辊回转半径分别为320、175 mm。机具刀轴转速较高时,有利于提高碎土率、覆土均匀性及厢面平整度。机具田间作业时,拖拉机动力输出轴PTO转速为540~720 r/min,机具传动比设计为1.5∶1, 确定刀轴转速为360~480 r/min。
开沟刀切土节距对碎土率、厢面平整度影响较大,计算式为
(10)
式中S——切土节距,mm
v——机组前进速度,m/s
z——开沟刀盘上安装的开沟刀数量
n——刀轴转速,r/min
对于黏重土壤工况,切土节距一般取40~60 mm[25],为保证宽幅种床作业质量和厢面平整度,选取切土节距S为20~30 mm。由式(10)可知,在刀轴转速一定的情况下,影响切土节距的主要因素为机组前进速度v及开沟刀盘上安装的开沟刀数量z,且与机具前进速度成正比,与开沟刀数量成反比,在切土节距范围一定的前提下,开沟刀数量较少会限制机组前进速度。为保证机具作业效果,提高机具作业效率,基于切土节距计算公式,确定开沟刀盘上安装的开沟刀数量z为8,机组前进速度v为3.6~5.0 km/h。
2.2.2分土导流板结构参数设计
开沟刀片切割土垡时,土壤沿开沟刀盘相切的后方抛出,为保证厢面平整,设计分土导流板使土壤受约束改变运动方向便于均匀覆于厢面。分土导流板结构安装示意图如图11所示,主要由中间板、分土板、导向板组成,中间板将两侧分土板连接于一体;分土板将沟土分散至开沟刀盘两侧,有效防止沟内回流;导向板将土壤颗粒分散导向至厢面。分土导流板整体呈圆弧状,为使分土导流板可以笼罩全部土壤,圆弧的上端与机架相连接,圆弧的下端与地表平齐。
图11 分土导流板结构与空间布局Fig.11 Structure and spatial layout of soil dividing deflector1.安装孔 2.开沟装置 3.中间板 4.分土板 5.导向板
由图11可知,分土导流板主要结构参数有侧置传动箱中面至分土导流板连接座的安装距离r1、导向板长度Xf、分土板角度θ和中间板长度Xk等,根据图11中几何位置,对分土导流板各项参数进行分析:
安装距离r1影响土壤经开沟刀抛出至分土板间的运动距离,结合整机结构布局,确定安装距离r1范围:200 mm≤r1≤300 mm;为避免导向板与机架出现缝隙,其上缘应保证与机架平齐,同时导向板长度Xf受到机架空间结构与分土板长度的约束,综合分析,确定导向板长度范围:200 mm≤Xf≤600 mm;分土板安装角度θ,与分土板长度Xj和分土板高度Xg有关,为保证分土作业效果,确定安装角度范围:30°≤θ≤60°;中间板长度Xk确定为两开沟刀盘的横向距离,即Xk=200 mm。
综上所述,侧置传动箱中面至分土导流板连接座的安装距离r1、分土板角度θ、导向板长度Xf3个参数确定后即可确定分土导流板的整体结构参数。为保证覆土均匀性,将通过离散元仿真试验确定分土导流板较优结构参数组合。
3 分土导流板结构参数仿真
分土导流板结构参数影响种床覆土均匀性,对不同结构参数组合下的分土导流板覆土均匀性进行仿真分析,确定较优结构参数组合。
3.1 模型建立
为分析不同结构参数组合对分土导流板的覆土均匀性,基于EDEM开展仿真分析,仿真模型如图12所示。其中土壤颗粒的接触模型为Hertz-Mindlin with Bonding模型,颗粒半径为8 mm,仿真所用本征参数和接触参数主要通过文献[26-29]和试验获得,其中,土壤和钢体泊松比分别为0.38、0.3,密度分别为1 280、7 850 kg/m3,剪切模量分别为1×106、7.9×1010Pa,模型接触参数如表3所示。
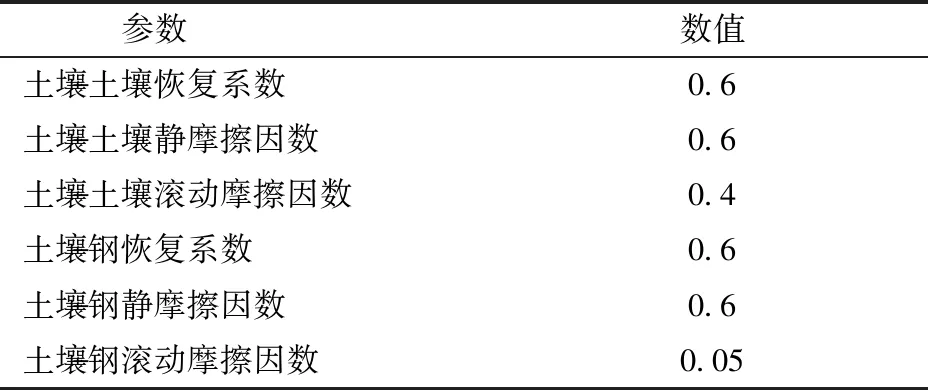
表3 模型接触参数Tab.3 Contact parameters of model
图12 仿真模型Fig.12 Simulation model1.机具 2.土槽 3.畦沟土壤
3.2 试验方法
依据2.2.2节对分土导流板的分析结果,以安装距离r1、导向板长度Xf、分土板角度θ作为试验因素开展三因素三水平正交试验,设计试验因素编码如表4所示。
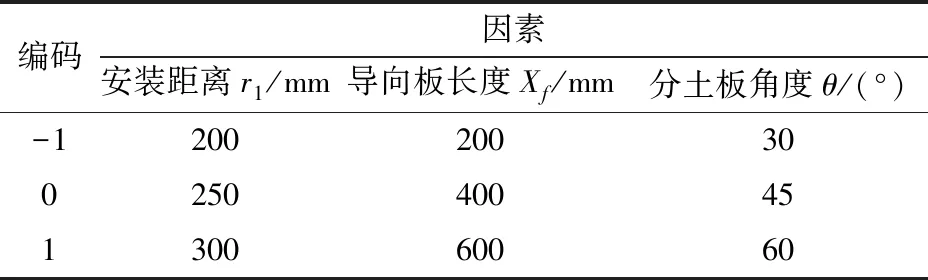
表4 因素编码Tab.4 Factors and coding
根据油菜田间种植农艺要求以及油菜播种机实际作业效率,设定机组前进速度为3.6 km/h、刀轴转速为480 r/min、开沟深度为150 mm。采用EDEM软件中Geometry Bin功能模块,在作业后的厢面沿作业前地表平面构建如图13所示的方块集合,每一个方块为100 mm×100 mm×100 mm的正方体,统计每个方块中的颗粒个数,用来模拟真实作业后该对应区域单位体积内的土壤数量,按照机具作业技术要求,选取距沟缘两侧1 000 mm范围内的厢面作为横向测量范围。在测量区域内,沿作业方向在稳定段等距截取10组横向格组。

图13 仿真后处理结果Fig.13 Simulation post-processing results

3.3 结果分析
仿真试验结果如表5所示。

表5 仿真试验设计与结果Tab.5 Simulation test design and results
将表5的内容导入Design-Expert软件中,处理分析相关数据,各因素及指标的回归分析如表6所示。
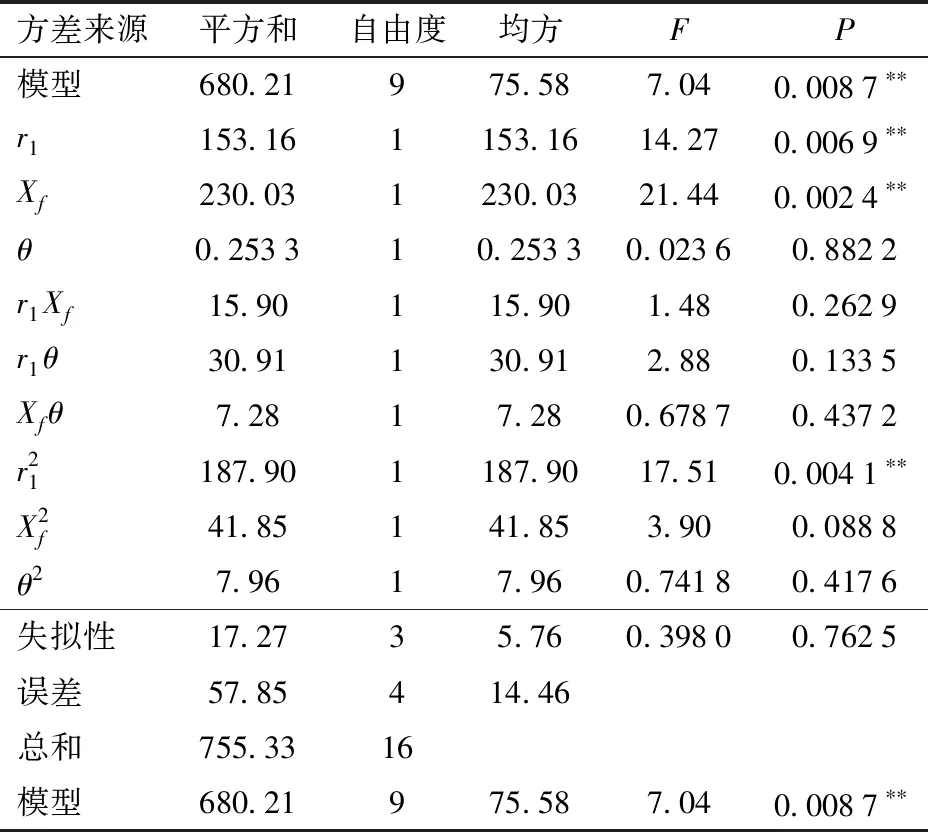
表6 仿真试验回归模型方差分析Tab.6 Simulation test regression model analysis of variance
如表6所示,对回归模型进行方差分析,该回归模型P<0.01,表示回归模型高度显著,模型失拟项P>0.05,模型的失拟性不显著,模型拟合程度高。得到各因素与覆土均匀性的回归响应面方程为

(11)


图14 各因素对覆土均匀性影响响应面分析Fig.14 Response surface analyses of factors on uniformity of overlying soil
由图14a可知,当安装距离为250 mm时,在导向板长度各水平下,覆土均匀性随着分土板角度增大呈先下降后上升的趋势;在分土板角度各水平下,覆土均匀性随着导向板长度增大呈逐渐增大的趋势;当导向板长度为600 mm、分土板角度为30°时,覆土均匀性最大值为80.41%。由图14b可知,当导向板长度为400 mm时,在安装距离各水平下,覆土均匀性随着分土板角度增大呈先下降后上升的趋势;在分土板角度各水平下,覆土均匀性随着安装距离增大呈先下降后上升的趋势;当安装距离为200 mm、分土板角度为60°时,覆土均匀性为87.07%。由图 14c可知,当分土板角度为45°时,在安装距离各水平下,覆土均匀性最大值随着导向板长度增大呈逐渐增大的趋势;在导向板长度各水平下,覆土均匀性随着安装距离增大呈先下降后上升的趋势;当安装距离为200 mm、导向板长度为600 mm时,覆土均匀性最大值为90.48%。
对仿真结果进行分析可得,分土导流板结构参数中安装距离r1与导向板长度Xf对覆土均匀性的影响为极显著,分土板角度θ对覆土均匀性影响不显著,各因素间无交互作用;安装距离因素的平方项影响极显著,其余因素平方项影响不显著。在安装距离为200 mm、导向板长度为600 mm、分土板角度为60°时,可得到最大的覆土均匀性93.33%。以较优分土导流板参数重新进行仿真,进行3次仿真试验求其均值,可得平均覆土均匀性为92.13%,与预测结果基本一致,说明回归方程准确。
4 田间试验
为验证油菜宽幅折叠式浅旋精量联合直播机的田间作业效果,以碎土率、秸秆埋覆率、厢面平整度、畦沟深度、沟深稳定性系数、畦沟宽度、成苗率作为试验指标进行田间试验,综合评价该机具作业效果。
4.1 试验条件
田间试验在湖北省荆州市监利县进行,整机配套动力为东方红LX-954型拖拉机,后挂接油菜宽幅折叠式浅旋精量联合直播机,试验设备包括Trimble三维激光扫描仪、土壤坚实度测量仪、电子称量器、电热恒温鼓风干燥箱、环刀组件、取土框、直尺、卷尺等,试验前对试验地块相关工况参数进行测定,结果如表7所示。
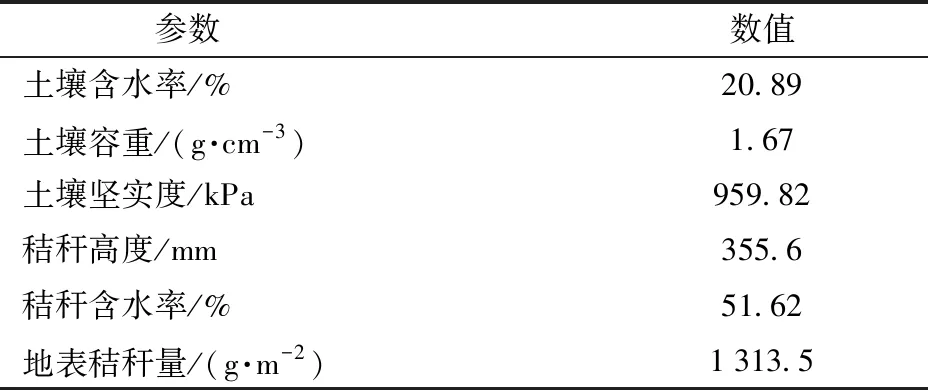
表7 作业前地表工况Tab.7 Surface conditions before operation
4.2 试验方法
试验前设定机组前进速度为3.6 km/h、刀轴转速为480 r/min、畦沟深度为150 mm,作业质量指标测试方法参考标准NY/T 740—2003《田间开沟机械作业质量》、GB/T 5668—2008《旋耕机》与NY/T 1143—2006《播种机质量评价技术规范》进行测量,确定每次试验行程长度为100 m,以中间60 m范围内作为测试区域。其中,碎土率、秸秆埋覆率、厢面平整度、成苗率测定方法如下:
测量碎土率时,在作业地表覆土层范围内,沿行程等间距用500 mm×500 mm的矩形框圈定5个测量区,采集区域内的土块,土块按最长边计量,以小于等于40 mm的土块质量对该测量区全部土壤质量的占比作为碎土率,取5组数据平均值,计算式为
(12)
(13)
式中E0i——第i个测量区矩形框内边长最大值小于等于40 mm土块质量,g
Ei——第i个测量区矩形框内覆土层范围内全部土块质量,g
Gi——第i个测量区的碎土率,%
N1——作业区域内选定的测量区个数,个
G——整机作业后碎土率,%
测量秸秆埋覆率时,在作业行程方向等距用500 mm×500 mm的矩形框圈定5个取样区域,采集测量区内所有秸秆,并将浮于地表的秸秆分袋取样称量,秸秆埋覆率计算式为
(14)

(15)
式中Lqi——第i取样组测量区域内所有秸秆质量,g
Lhi——第i取样组测量区域内浮于地表秸秆质量,g
Ji——第i取样组的秸秆埋覆率,%
N2——在作业区域内选定的取样区个数,个
J——秸秆埋覆率,%
测量厢面平整度时,采用三维激光扫描以及配套处理软件的非接触式扫描分析法,该方法相较传统地表接触式厢面平整度测量法精度更高;机具作业完成后,运用Trimble三维激光扫描仪,将作业地表特性以空间点云形式进行表达,扫描作业如图15所示。
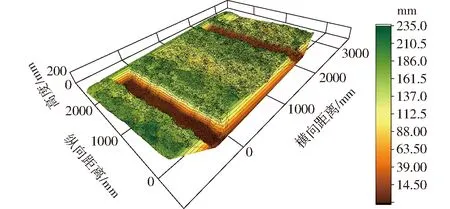
图15 作业地表厢面三维数字化建模Fig.15 3D digital modeling of operating surface compartment
在行程方向的稳定作业区域内,等间距取10段截面,将该截面的坐标点密度降低10倍,导出降低密度后的点云坐标,提取点的高程方向坐标值,可得每一段截面的平整度,以10段不同截面平整度均值表示该行程作业后的厢面平整度,计算式为
(16)
其中
(17)
式中Xij——第i段截面第j个点的高程坐标值,mm
Ximax——第i段截面各点高程坐标值的最大值,mm
Ri——第i段截面点数量,个
R′ ——所划分的截面数量,个
Pi——第i段截面平整度,mm
PX——厢面平整度,mm
在完成播种作业14~21 d后,测量油菜成苗率[30],随机选取试验地块3个测量区域,每个区域面积为1 m2,测定每个区域内各行的苗数,计算式为
(18)

(19)
式中Qc——播种粒数,粒/m2
Q——播种量,g/m2
Qk——种子千粒质量,g
Qs——田间实际成苗数,株/m2
c——成苗率,%
4.3 试验结果分析
油菜宽幅折叠式浅旋精量联合直播机整机作业效果如图16所示,试验结果如表8所示。
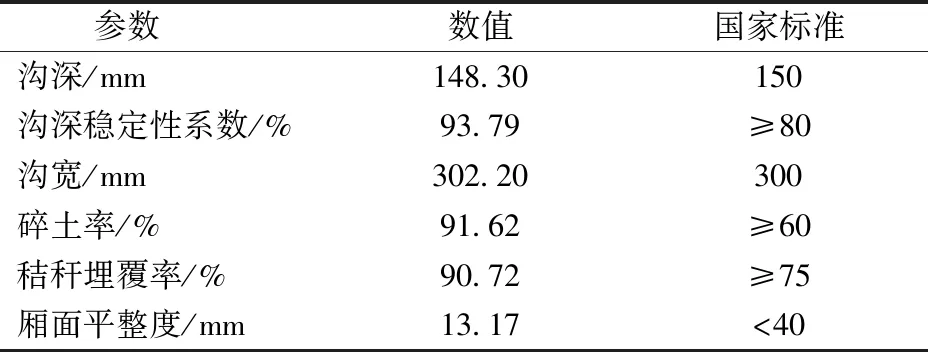
表8 试验结果Tab.8 Test results
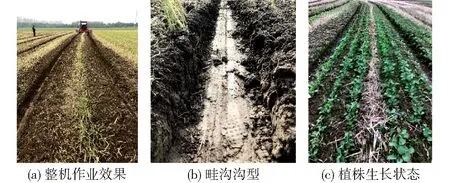
图16 田间作业效果Fig.16 Effects of field operation
由表8可知,油菜宽幅折叠式浅旋精量联合直播机作业后种床碎土率为91.62%且可有效地对秸秆残茬进行埋覆,其秸秆埋覆率为90.72%,均高于国家标准要求;厢面平整度为13.17 mm,表明该机
具开沟抛土装置抛土均匀,且液压折叠装置作业稳定;油菜成苗率为73.89%,表明该机具作业后种床质量较好,成苗率较高。各项指标均满足NY/T 740—2003《田间开沟机械作业质量》、GB/T 5668—2008《旋耕机》和NY/T 1143—2006《播种机质量评价技术规范》标准要求。
5 结论
(1)为解决长江中下游稻油轮作区油菜播种工序复杂、作业效率低的问题,结合油菜种植农艺要求,研制一种油菜宽幅折叠式浅旋精量联合直播机,一次作业可进行开畦沟、浅旋灭茬、油菜播种、种床覆土等作业工序,完成幅宽4 000 mm共12行油菜播种作业要求。
(2)根据整机结构布局和作业需求,确定了液压折叠系统和开沟浅旋灭茬装置的基本结构。基于机构运动学特性和力矩平衡原理对液压缸结构参数和受力特点进行了理论分析,并运用Matlab软件确定了液压缸具体的结构参数;根据开沟浅旋灭茬作业要求,确定了开沟刀、浅旋刀辊旋转半径分别为320、175 mm,刀轴转速为360~480 r/min,开沟刀盘开沟刀数量为8,机组前进速度为3.6~5 km/h。基于整机结构布局和理论分析,确定分土导流板结构参数的取值范围,利用EDEM仿真软件,对分土导流板结构参数组合进行分析,得到较优结构参数组合为:安装距离200 mm、导向板长度600 mm、分土板角度60°。
(3)油菜宽幅折叠式浅旋精量联合直播机的田间试验结果表明:当机组前进速度为3.6 km/h、刀轴转速为480 r/min、畦沟深度为150 mm时,种床碎土率为91.62%,秸秆埋覆率为90.72%,厢面平整度为13.17 mm,油菜成苗率为73.89%,油菜生长状态良好,整机作业效果满足油菜直播作业要求。
猜你喜欢
蜜蜂杂志(2021年10期)2021-12-06
中阿科技论坛(中英文)(2021年2期)2021-03-17
蜜蜂杂志(2021年11期)2021-02-18
冶金设备(2020年2期)2020-12-28
重型机械(2020年2期)2020-07-24
铁道通信信号(2018年11期)2019-01-19
农机化研究(2018年8期)2018-07-10
新农业(2016年14期)2016-08-16
中国农业文摘-农业工程(2016年5期)2016-04-12
石油化工建设(2015年6期)2015-12-01
