
直驱永磁风力发电系统的建模仿真研究
2023-08-22 01:23曾诚实
通信电源技术 2023年13期
曾诚实
(国网台州供电公司,浙江 台州 318000)
0 引 言
根据实时风速的不同,控制风机功率的稳定输出。在额定风速以下时,风机需要实现风机功率的最大捕获和输出;当超过额定风速时,受系统机械、发电机、变换器等额定条件限制,必须减少风机捕获的能量,利用变桨距技术使发电机的输出功率维持在额定工况。
1 额定风速下的最大风能追踪
当实际风速低于系统的额定风速时,因为风机的捕获功率随着叶片速度的变化而变化,对于某一个风速都有一个最优的转速可以匹配,所以最大风能控制就是控制风机转速使其一直能运行在最大功率点。当桨距角不变时,就有一个最优化的叶尖速比λ与其匹配,使风能利用系数Cp值为最大,实现风力机最大输出功率。叶尖速比公式为
式中:ωm为风力机旋转角速度;R为风机叶片尺寸;V为叶片根部的风速。为了保证最优的叶尖速比,在R固定不变时,需要使风机转速随着来风的风速变化。为了获得永磁同步发电机(Permanent Magnet Synchronous Generator,PMSG)机组最大性能优势,实现风能的最大吸收以及最大发电功率,发电机的转速调整必须够迅速,需要采用合适的控制方法来适应风速变化。
直流电机拥有优异的调速性能,由于直流电机的励磁电流和主磁通成比例关系,只要控制励磁电流稳定,就能控制主磁通值保持不变。直流电机的转矩值由相互不受影响的电流和主磁通联合决定,因此直流电机的转矩和转速可以分开独立控制,调速性能优异[1]。永磁同步电机与外部无功功率交换为0。参考直流电机的控制,通过基于定子电流d轴分量id=0对风机转速进行控制,电机转矩Te的计算公式为
式中:np为电机极对数;ψf为转子磁链值;iq为电机定子电流;转子磁链值ψf恒定时,Te与iq为比例关系。在id=0 的前提下,只要保持定子电流与坐标系d轴呈垂直关系,就可以参照直流电机,控制iq来控制永磁电机的转矩,使输出Te快速响应iq,从而实现对PMSG 的耦合参数的解耦和转矩转速的独立线性控制[2]。
在风力发电机风能转化过程中,PMSG 发电功率大小取决于叶片所捕获的风速,在桨距角不变的情况下,发电机的转速值在对应的风力机功率曲线图上都有一个最优的功率匹配点[3]。因此,风力发电机组控制发电机转速也就控制了发电有功功率输出,其总体双闭环控制系统如图1 所示。

图1 PMSG 控制系统框图
由于发电机由永磁同步发电机,不存在无功功率交换,在dq坐标系下,通过控制矢量可以产生对应的电压ud和uq以及电频率fe,实现对发电机转速的控制[4,5]。
2 额定风速以上的功率控制
为保证在额定风速以上时变桨距机组正常运行,需要通过调节桨距角,保持输入功率在额定功率附近,同时减少强风情况造成的不利影响。如果发电机转速变大,那么发电机的有功功率输出也必然增大,为保证机组各项状态稳定,可以通过变桨距技术,在风速超过风机额定值时,调节桨距角,抵消大风的能量,从而保持输入输出平衡。变桨控制框图如图2 所示。

图2 变桨控制框图
从叶片桨距角系统控制过程可知,当β增大时,Pm会降低。当风速大于额定风速,Pm超过额定值时,需要调节叶片节距使β变化,保持发电机的输出有功功率在允许的范围之内。
3 仿真模型的建立
根据上述数学模型,在Simulink 软件中建立相关的仿真模型,主要包括风力机部分、传动轴部分、发电机部分以及变流器部分,并进行仿真验证。系统模块采用的是叶尖速比法,如图3 所示。
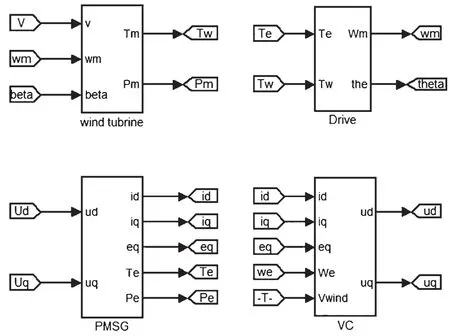
图3 整体系统模块
设置发电机额定功率为3.3 kW,相电压为220 V,风轮半径为1.5 m,空气密度取1.225 kg/m3,λopt取7,Cpmax取0.45。开始时风速为10 m/s,在3 s 时风速变为13 m/s,相关的仿真数据如图4 ~图8 所示。

图4 发电输出功率

图5 叶尖速比与Cp
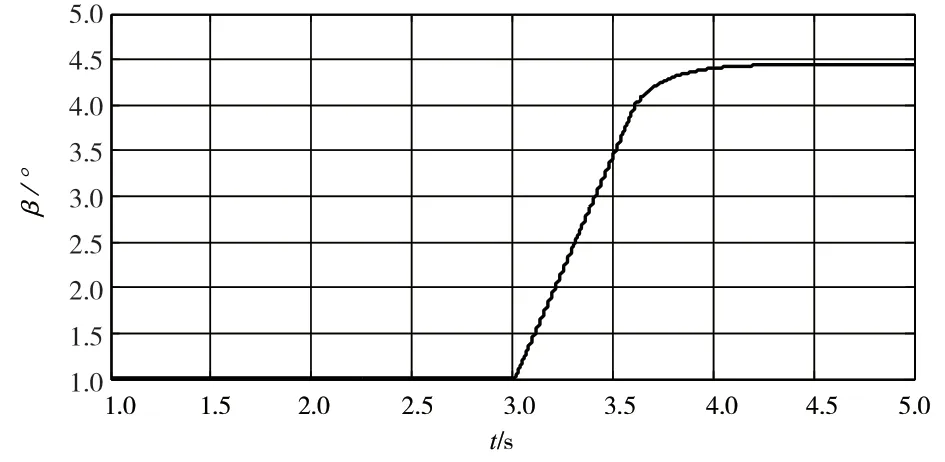
图6 桨距角变化

图7 风机输出转矩
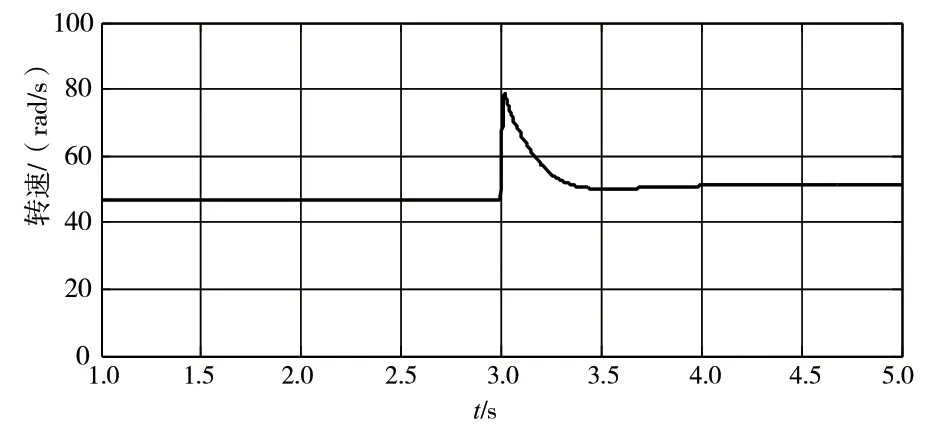
图8 机械转速变化
仿真结果显示,机组在初始风速下,风力机的桨距角保持最初角度不变,Cp也为最大值0.45 附近,发电机输出功率稳定。当风速发生变化后,发电功率增大。超过额定风速后,变桨距控制系统发挥作用,发电机功率经过一个较短的暂态过程后能够稳定输出,验证了仿真模型的有效性。
4 结 论
通过分析直驱永磁同步风力发电系统各组成部分的数学模型,在Simulink 软件环境中建立了系统的整体仿真控制模型,完成对PMSG 系统的仿真研究。仿真结果验证了相关模型以及采用的控制方案的有效性。
猜你喜欢
电力科学与工程(2022年9期)2022-10-10
电力建设(2022年7期)2022-07-04
东方汽轮机(2020年3期)2020-11-04
大电机技术(2018年4期)2018-09-26
通信电源技术(2016年1期)2016-04-16
汽车工程(2016年11期)2016-04-11
电源技术(2016年2期)2016-02-27
黑龙江工程学院学报(2015年5期)2015-12-04
电机与控制应用(2015年3期)2015-03-01
汽车工程(2014年7期)2014-10-11
