一种航天用双向定值扭矩扳手设计
2023-08-18 12:38:51徐春光冉江南高奔刘寅
机械 2023年5期
徐春光 冉江南 高奔 刘寅


摘要:空间站某些在轨设备的维修及更换需要将螺钉拧松与拧紧到达指定扭矩。根据某任务需求,设计了一种航天用双向定值扭矩扳手,该工具能够满足拧松力矩大于拧紧力矩。本研究对双向定值扭矩扳手的结构和原理进行了介绍,设计棘轮两侧不同角度,47°方向对应拧紧,拧紧力矩为7 N·m,40°方向对应拧松,拧松力矩为9 N·m。通过理论分析和仿真分析对拧紧拧松时所需要的扭矩进行计算,并结合产品开展了相应的试验。试验结果与力矩计算、仿真结果基本一致。
关键词:双向;定值;扭矩扳手;棘轮
中图分类号:TH69 文献标志码:A doi:10.3969/j.issn.1006-0316.2023.05.013
文章编号:1006-0316 (2023) 05-0076-05
Design of a Two-Way Constant Torque Wrench for Aerospace
XU Chunguang,RAN Jiangnan,GAO Ben,LIU Yin
( Tianjin Institute of Astronautics Electromechanical Device, Tianjin 300458, China )
Abstract:The maintenance and replacement of some on-orbit equipment on the space station requires the loosening and tightening of the screws to reach the specified torque. According to the requirements of a mission, a two-way constant torque wrench for aerospace is designed, which can meet the requirement that the loosening torque is greater than the tightening torque. This paper introduces the structure and principle of the two-way constant torque wrench. The angles on both sides of the ratchet are different, the tightening torque is 7 N·m with the angle of 47°, and the loosening torque is 9 N·m with the angle of 40°. Through the theoretical analysis and simulation analysis, the torque required for tightening and loosening is calculated, and the corresponding tests are carried out on the products. The test results are basically consistent with the torque calculation and simulation results.
Key words:bidirectional;constant value;torque wrench;ratchet
空间站在轨组装建造、维护维修、空间应用与科学实验,都需要航天员实施出舱活动,携帶相关的设备和舱外工具,完成指定操作任务[1-3]。从国外空间站建造、运营、维修的经验看,在轨维修对保障航天员生命安全和空间站在轨正常运营、提高空间站在轨寿命、降低空间站运营成本等方面有着十分重要的意义[4-5]。某些在轨设备的维修及更换需要拧松及拧紧螺钉,操作过程中,螺钉的拧松力矩要大于拧紧力矩以此达到维修的目的。目前市面上的商用扭矩扳手是拧紧与拧松两个方向都为定值,不能满足拧松力矩大于拧紧力矩的要求。根据某些在轨设备维修的需求性,设计一种拧松力矩大于拧紧力矩的双向定值扭矩扳手[6-7]。在地面经过验证能够满足拧松力矩大于拧紧力矩的要求。该力矩扳手最大的优点为拧紧与拧松两个方向扭矩是不同值,应用范围更广。
1 结构设计及工作原理
1.1 结构设计
该力矩扳手的主要结构组成如图1所示[8]。
力矩扳手的换向功能主要由换向盖板、钢珠、钢珠等实现。当需要换向时,转动换向盖板,换向盖板内的钢珠在弹簧的作用下挤压换向卡子,换向卡子与棘轮内齿相啮合,完成换向。瞬时针旋拧力矩扳手,当达到定值扭矩时,棘轮内齿与换向卡子外齿啮合且不会发生相对转动,在拧紧的过程中换向盖板不会自己松脱转回。逆时针旋拧力矩扳手手柄,为拧松状态;顺时针旋拧力矩扳手手柄,为拧紧状态。
力矩扳手的打滑主要由弹簧、顶杆、顶块、螺塞等实现。通过调节靠近顶杆的螺塞的旋入深度来调节弹簧的伸缩量,从而调节力矩扳手的预置力,第二个螺塞用于防松,并涂螺纹防松胶。
1.2 工作原理
螺钉拧紧:将套筒转接件与被拧紧螺钉进行连接,逆时针转动换向盖板,将力矩扳手调至拧紧状态,顺时针转动套筒本体,开始拧紧螺钉。当螺钉拧紧至指定扭矩值时,棘轮转动带动顶块压缩弹簧,实现打滑,螺钉拧紧工作完成。
螺钉拧松:顺时针转动换向盖板,将力矩扳手调至拧松状态,逆时针转动套筒本体,开始拧松螺钉。当螺钉拧紧至指定扭矩值时,棘轮转动带动顶块压缩弹簧,实现打滑,螺钉拧松工作完成[9]。
2 扭矩理论计算
力矩扳手双向定值力矩通过棘轮与顶块两侧不同角度实现。为便于分析,将棘轮和顶块的受力等效集中到齿面接触中点位置O点[10]。受力如图2所示。
力矩扳手在理论临界状态下力矩平衡。
3 扭矩扳手有限元分析
3.1 有限元模型建立
对扭矩扳手整体模型进行简化,选取棘轮、顶块、弹簧、弹簧座、换向卡子组成扭矩扳手仿真模型。顶块与棘轮的夹角取40°和47°。47°对应拧紧方向,拧紧力矩7 N·m,40°对应拧松方向,拧松力矩9 N·m。在ABAQUS有限元软件中对棘轮、顶块、弹簧座、换向卡子进行实体单元建模,采用四面体网格进行划分,网格单元为C3D4四节点线性四面体单元。弹簧用spring单元进行建模,弹簧刚度为90 N/mm。扭矩扳手简化模型如图3所示。
3.2 材料属性
棘轮、顶块、弹簧座、换向卡子的材料为9Cr18,硬度为HRC 42~45。对模型赋予材料属性,如表1所示[12]。
3.3 载荷施加
棘轮与换向卡子、顶块之间为面-面接触,仿真过程中对弹簧座底面施加固定约束,对棘轮施加0.8 rad/s的转动速度,对顶块施加454 N的弹簧预紧力。分析换向卡子强度时,对棘轮施加9 N·m的弯矩。载荷施加如图4所示。
3.4 分析结果
3.4.1 棘轮与顶块分析结果
通过有限元分析得到拧紧方向和拧松方向的应力云图如图5所示。可以看出,无论是拧紧方向还是拧松方向,应力集中在顶块进入下一个棘轮齿的圆角部分,原因为,棘轮在转动过程中受到来自顶块的弹簧力,在进入到下一个棘轮齿前还要继续下压弹簧,致使弹簧力增大,所以会在圆角部分产生应力集中现象[13]。
在仿真过程中,还对顶块两侧的接触面输出了反作用力。拧紧方向输出的合力为648 N,拧松方向输出的合力为814 N。计算得出,47°对应拧紧方向,拧紧力矩7.128 N·m;40°对应拧松方向,拧松力矩9.064 N·m。
3.4.2 棘轮与换向卡子分析结果
通过仿真分析得到在9 N·m的弯矩下,换向卡子的受力云图,如图6所示。可以看出,应力主要集中在换向卡子棘齿部分,主要原因为,逆时针旋拧力矩扳手时,当达到定值扭矩,棘轮内齿与换向卡子外齿进行啮合且不会发生相对转动,棘齿部分存在尖角,易产生应力集中。换向卡子棘齿最大应力118.8 MPa,位移0.005 mm,根据表1,换向卡子强度满足要求。
4 扭矩扳手试验验证
4.1 扭矩扳手加工
为验证扭矩扳手定值扭矩的真实性,对扭矩扳手进行加工。顶块与棘轮的夹角为40°和47°。弹簧刚度90 N/mm。除顶杆材料为2A12外,其余都为9Cr18。零件加工完成后对扭矩扳手进行组装,成品如图7所示。
4.2 扭矩值检定
对装配完的扭矩扳手进行拧紧操作、拧松操作两个方向的扭矩值检定。检定的仪器型号为DOTE100N3-G。检定方法为,将扭矩扳手水平安装在仪器上,逆时针转动换向盖板,将扳手调节到拧紧档,顺时针转动手柄,力矩扳手进行拧紧,当拧紧到力矩扳手打滑时,停止操作;顺时针转动换向盖板,将扳手调节到拧松档,逆时针转动手柄,螺钉拧松,停止操作[10]。如图8所示。
4.3 扭矩值分析
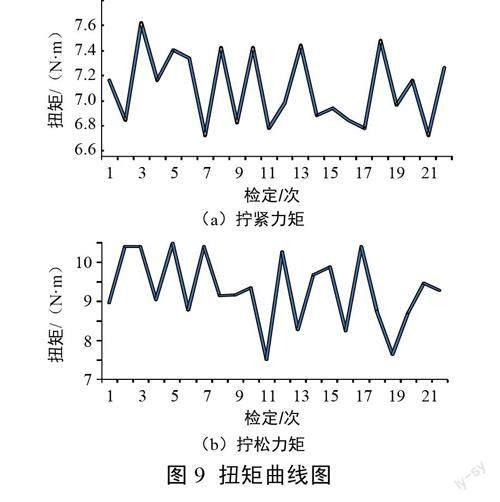
分别对扭矩扳手拧紧方向、拧松方向进行22次检定,得出拧紧方向、拧松方向的扭矩曲线,如图9所示。可以看出,拧紧的平均力矩为7.096 N·m,拧松的平均力矩为9.281 N·m。
通过试验得出,试验数据与理论数据存在±5%的误差。存在误差的主要原因为摩擦力造成的影响。因为棘轮与顶块采用线切割快走丝方式进行加工,棘轮与顶块接触面表面粗糙度不高,产生的摩擦力较大,容易造成误差。为了后续继续验证理论与试验存在的误差,可以通过提高棘轮与顶块的表面粗糙度和增加棘轮与顶块之间的润滑两种方式减小摩擦力。
5 结论
通过理论计算、有限元仿真、扭矩扳手试验验证三种方式,得出了扭矩扳手中顶块与棘轮的不同夾角对应的扭矩值,三种分析方法确定的扭矩值误差在±5%。分析该误差存在的原因为摩擦力的影响。该设计能够实现拧紧和拧松两个不同方向的扭矩,使得扭矩扳手的使用范围更广。
参考文献:
[1]孙启臣,姜坤,张子岚. 航天员出舱可伸缩安全系绳设计与验证[J]. 北京航空航天大学学报,2021,47(7):1353-1360.
[2]朱仁璋,王晓光,王鸿芳. 舱外活动系统述评[J]. 航天器工程,2008,17(6):7-31.
[3]王大鹏,谭春林,张柏楠. 载人航天器在轨维修性系统设计[J]. 中国空间科学技术,2010,30(5):16-22.
[4]张海军,崔利荣. 空间站的维修性[J]. 质量与可靠性,2013(4):9-12.
[5]苏川. 一种空间压紧杆维修工具的设计[J]. 机械制造与自动化,2019,48(2):226-228.
[6]赵排航,王克印,黄海英,等. 扭矩扳手发展现状及展望[J]. 工具技术,2015,49(10):20-24.
[7]陈军,蒲如平,陈凡. 定力矩扳手系统可靠性优化设计方法[J]. 机械,2003(S1):25-27.
[8]高昂利. 一种拐臂式限力扭矩扳手设计[J]. 科技致富向导,2014(19):236-236.
[9]李海林. TNB扭矩扳手的原理分析[J]. 铁道技术监督,1999(12):33-34.
[10]吉方,蒲如平,张华全. 可调扭矩测力扳手的设计[C]. 中国工程物理研究院科技年报(2001),2001.
[11]陈军,连克难,蒲如平. 定力矩扳手圆柱螺旋弹簧的强度可靠性设计[J]. 机械,2003(S1):36-37.
[12]任振锟,宋文学,彭琰举,等. 扭矩扳手的有限元仿真与优化[J]. 机械制造,2019,57(2):16-20.
[13]纪绍伟,杨军,汤蕊,等. 手动扭矩工具及其误差调整[J]. 计量技术,2011(5):74-76.
收稿日期:2022-05-24
作者简介:徐春光(1995-),男,河北衡水人,硕士研究生,工程师,主要从事航天器结构和机构设计工作,E-mail:xchg1995@126.com。
猜你喜欢
出版人(2022年11期)2022-11-15 04:30:18
中学生数理化(高中版.高二数学)(2022年1期)2022-04-26 13:59:54
新世纪智能(教师)(2021年2期)2021-11-05 08:43:26
东北大学学报(自然科学版)(2021年1期)2021-01-15 09:30:14
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
电子制作(2018年10期)2018-08-04 03:25:02
电子制作(2018年12期)2018-08-01 00:48:08
通信电源技术(2016年5期)2016-03-22 01:09:37
电气化铁道(2015年2期)2015-06-29 10:05:39
电源技术(2015年9期)2015-06-05 09:36:07